1
Perancangan Maximum Power Point Tracker (MPPT) Untuk
Panel Surya Menggunakan Konverter Cuk Dengan Metode Hill
Climbing
Dianggoro Darmawan 2207 100 539
Jurusan Teknik Elektro-FTI, Institut Teknologi Sepuluh Nopember Kampus ITS, Keputih-Sukolilo, Surabaya-60111
Email: [email protected]
Abstrak - DC-DC konverter dengan Maximum
Power Point Tracker (MPPT) diperlukan untuk memaksimalkan daya keluaran panel surya dengan radiasi matahari yang berubah-ubah.yang terpasang antara panel dengan beban atau baterai.. Untuk mendapatkan daya maksimum dari panel surya, tegangan output dari panel surya harus dioperasikan pada tegangan saat titik daya maksimum (mpp). Dengan metode MPPT, duty-cycle pada swicth konverter dirubah pada nilai yang tepat, sehingga tegangan keluaran dari panel surya beroperasi pada tegangan saat titik daya maksimum (mpp). MPPT membutuhkan ripple tegangan dan arus input yang kecil dari panel agar didapatkan data daya keluaran panel surya dengan akurat. Hal itu bisa dipenuhi dengan menggunakan Continous Conduction Mode (CCM) konverter Cuk. Dengan metode ini, daya keluaran maksimum pada panel surya dapat disalurkan pada beban atau baterai sehingga dapat meningkatkan efisiensi kerja dari sistem panel surya.
Kata kunci : Cuk konverter, Kurva I-V, Maximum
Power point Tracker Hill Climbing.
1. Pendahuluan
Krisis energi dan pemanasan global memaksa para peneliti mengembangkan sumber energi alternatif seperti panel surya yang bersifat terbarukan dan juga ramah lingkungan. Panel surya saat ini memberikan harapan menjadi sumber energi alternatif yang terbarukan.
Kendala utama dari panel surya adalah daya keluaran panel yang dipengaruhi radiasi matahari yang selalu berubah-ubah. Sistem panel surya memperlihatkan bahwa hubungan nonlinier arus-tegangan, membutuhkan pencarian dan identifikasi Maximum Power Point (MPP) yang optimal. Maximum Power Point tracker dibutuhkan untuk memaksimalkan energi panel surya terhadap setiap temperatur dan level iluminasi matahari.
Gambar 1 Blok Diagam Rangkaian
Keandalan setiap panel surya ditentukan oleh kondisi pengoperasian beban dan perubahan cuaca yang mendadak.
Dc-dc konverter Cuk dipilih karena 1) ripple arus input sangat kecil sehingga didapatkan Kurva I-V yang akurat, 2) tegangan beban sama dengan tegangan sumber, 3) pengurangan electromagnetic
Interference (EMI) dikarenakan rendahnya input ripple arus dari panel surya, dan kecilnya
kapasitansi yang dibutuhkan untuk mengatasi
ripple arus[1]. Data kurva I-V ini nantinya untuk
mengatur duty-cycle dari switch konverter sehingga resistansi input konverter sama dengan resistansi ekivalen dari panel surya[2].Dc-dc konverter Cuk dioperasikan Continous Conduction Mode (CCM) sehingga arus di sisi input konverter selalu mengalir.
2. Pemodelan Panel Surya[3,4]
Model matematika dari panel surya merupakan arus short circuit (Isc) panel surya
dimana dipengaruhi oleh fungsi radiasi matahari (S) dan tegangan open circuit (Voc)dengan
persamaan di bawah ini.
⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = exp 0 1 0 S rs p ph p kTAn qV I n I n I
Io merupakan arus keluaran panel surya, np
banyaknya sel yang terhubung parallel, ns
banyaknya sel terhubung seri, k konstanta
Boltzmann, q
kecepatan perpindahan electron, T suhu permukaan panel, dan A konstanta deviasi karakteristik sel p-n junction. Irs merupakan arus
saturasi sel yang berubah mengikuti temperatur dengan persamaan
⎟⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎥
⎦
⎤
⎢
⎣
⎡
−
⎥
⎦
⎤
⎢
⎣
⎡
=
T
T
kA
qE
T
T
I
I
r G r rr rs1
1
exp
3Photo curr dan suhu dibawah in I Dimana Iscr = Aru ki = koef S = radi K arus mak dihasilkan, tidak ada teganganny circuit. ( menghasilk disebut Karaktersit yaitu fill D maksimum persamaan Se didefinisik sel (Pmax datang (P c N global dal suatu sel su D dibutuhkan kurva kara panel yang digunakan parameter pada tabel Tabel 1 Paramete Maximum Short Cir Maximum (Imax) Open Cir Nominal Series Co Fill Facto Luas pan rent (Iph) terga
sel yang ditu ni
[
I k Iph = scr +us sel short-circ fisien suhu sho asi cahaya (Wa Ketika sel dala simum atau , sedangkan p arus yang ya maksimum (VOC). Titik kan arus da maximum p tik penting factor (FF), d Dengan mengg m daya dari n, ehingga efis kan sebagai d x) dibagi deng cahaya) Nilai efisiensi lam menentuk urya. Dalam perancan n beberapa para akteristik yang g disimulasika panel surya E panel surya E 1. Parameter pan er m Power (Pmax rcuit Current (I m Power rcuit Voltage (V Voltage (Vmax onnection (ns) or (FF) el surya antung pada ra unjukkan pada
(
)]
10 s T T ki − r cuit (A) ort-circuit curr att/m2) am kondisi sh arus short c pada kondisi dapat menga m, disebut teg pada kurva an tegangan power poin lainnya dari dengan persam gunakan fill f sel surya d iensi sel s aya yang dih gan daya dari c/
ini yang men kan kualitas ngan simulasi
ameter untuk m g sesuai denga an. Dalam tug
El Sol 50 Wa El Sol 50 W nel surya El So Nil x) 50 Isc) 3,2 Current 2,9 Voc) 21, x) 17. 32 0.7 0.3 adiasi cahaya a persamaan 00 s rent hort circuit, circuit (ISC) open circuit alir sehingga gangan open a I-V yang maksimum nt (MPP). sel surya maan, factor maka didapat dari surya yang hasilkan dari cahaya yang njadi ukuran performansi panel surya, mendapatkan an datasheet gas akhir ini
att. Beberapa ditunjukkan ol 50 Watt lai Watt 25 Ampere 91 Ampere ,75 Volt .24 Volt 77 36 m2 Gamb Param Maxim (Pmax) Short Curren Maxim Curren Open Voltage Nomina (Vmax) Pemod pada dengan ditunju 3. M adalah power teganga duty cy menyal beban. satu m diimple membu slope y input k masuk dengan sebelum perban bar 3 Perancan Sol 50 Tabel 2 Perb meter D s um Power ) 5 Circuit nt (Isc) 3 A um Power nt (Imax) 2A Circuit e (Voc) 2V al Voltage ) 1V delan panel su gambar 3 da n datasheet p ukkan pada tabe
PPT Hill Clim
Maximum P
suatu metod
point (mpp) d
an panel surya
ycle yang nom
lurkan daya m Algoritma Hi etode MPPT y ementasikan. utuhkan dua p yaitu tegangan konverter (IIN). Dari dua pa (PIN), dan de n parameter mnya, yaitu P
dingan itu dida ∆
∆
ngan simulasi Watt pada PSI bandingan dat Data sheet Ha sim 50 Watt 50 3,25 Ampere 3,2 Am 2,91 Ampere 2,9Am 21,75 Volt 21 17.24 Volt 16 urya pada Ps an perbanding anel surya E el 2.\ mbing[3,5] Power Point T de untuk me dari kurva kar a agar dapat m minal, sehingga maksimum dari ill Climbing m yang sangat mu Perancangan parameter unt input konverte arameter itu d engan IIN, mak dari pembaca PIN(n-1) dan apatkan ∆P dan 1 1 panel surya E IM ta panel asil mulasi Err Watt 0 % 25 mpere 0 % 94 mpere 1.0 ,04 Volt 3.2 ,99 Volt 1,4 sim ditunjukka gan pemodela El Sol 50 Wa Tracker (MPPT encari maximu rakteristik day mengambil nil konverter dap i panel surya k merupakan sala urah dan muda n MPPT i
tuk menentuka er (VIN) dan aru
didapatkan Day ka dibandingka aan data yan
VN(n-1). Has n ∆I. El ror % % 03 % 26 % 45 % an an att T) um ya-lai pat ke ah ah ini an us ya an ng sil
3 Dan hasil perkalian antara ∆P dan ∆V
nantinya dinamakan slope.
∆ ∆
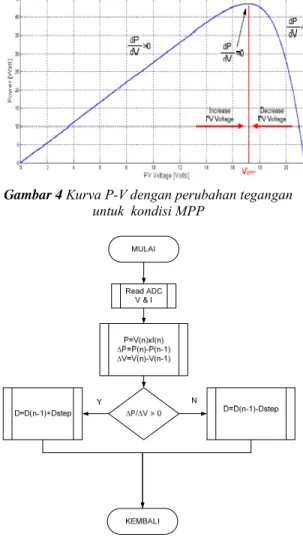
Gambar 4 memperlihatkan salah satu kurva panel P-V yang mempresentasikan dasar dari metode algoritma hill climbing. Garis merah menunjukan daerah dengan sinyal nol, yang merupakan nilai mpp. Bila nilai sinyal (slope) positif, maka tegangan akan naik untuk mendapatkan nilai mpp yang baru dan sebaliknya, jika nilai sinyal (slope) negatif, maka tegangan panel surya akan turun.
Arah slope ditentukan dengan perbandingan ΔP dan ΔV. Dengan karakteristik dari konverter Cuk didapatkan ketetapan arah dari
duty cycle. Bila hasil perbandingan (slope) itu jika
dikalikan menghasilkan nilai positif maka nilai
duty cycle ditambah dan bila menghasilkan nilai
negatif maka nilai duty cycle dikurangi. Dengan menentukan slope maka didapatkan referensi duty
cycle yang baru.
Gambar 4 Kurva P-V dengan perubahan tegangan
untuk kondisi MPP
Gambar 5 Flowchart metode Hill Climbing
Sebelum eksekusi slope dilakukan untuk mengurangi atau menambah duty cycle, maka melihat dahulu karakteristik dari konverter yang digunakan, yaitu persamaan fungsi resistansi dalam konverter (Ri) terhadap duty cycle pada konverter Cuk mode Continous Conduction Mode (CCM) adalah sebagai berikut[6].
1
Flowchart dari metode Hill Climbing ditunjukkan pada gambar 5.
4. Perancangan Konverter Cuk[6,7]
Pada cuk konverter, tegangan output bisa lebih besar atau lebih kecil dari tegangan input sesuai dengan kebutuhan. Cuk konverter menggunakan dua konduktor L1 dan L2. Capasitor
C1 memisahkan input dengan output dan
memberikan perlindungan terhadap short pada beban.
4.1 Pemilihan kapasitor C1
Dalam rangkaian konvensional konverter
Cuk, tegangan kapasitor C1 dianggap konstan.
Ketika dioperasikan sebagai tracker kurva P-V, tegangan kapasitor harus memenuhi 2 hal, yaitu : 1.) untuk menghasilkan tegangan yang konstan antara periode switching dan 2.) untuk mengikuti tegangan input dari kurva I-V panel (frekuensi
sweep).
Dengan periode switching (TS) adalah 50 µs, D saat
maksimum yaitu 1, dan R sama dengan 4 ohm, maka didapatkan C1 > 6µF, sehingga dipilih
C1=10µF.
4.2 Pemilihan induktor L1 dan L2
Syarat terbaik dalam menentukan induktansi adalah memberikan arus ripple
peak-to-peak lebih dari 40% dari arus input maksimum saat
tegangan input minimum. Aliran ripple arus terhadap nilai induktor L1 dan L2 diberikan oleh
persamaan
∆ 40%
40%
Untuk mendapatkan L1 dan L2 digunakan
pendekatan nilai ripple arus input konverter. Nilai induktor dihitung dengan persamaan
∆
Nilai maksimum didapatkan dengan D=1 dan VIN=VOC, sehingga L1 ditentukan dengan ripple
arus maksimum. Biasannya, nilai ∆iL1 adalah
+ VIN C Gambar 6 tidak diijin menaikkan komponen memperbe D Ampere m karena k L1=L2>453 4.3 Pem K maka dal berikut: K untuk bek dimana bil bekerja d sebaliknya dan L2 dal sebagai ber D uncoupled, Dengan ni adalah R < 4.4 Pem U dengan je berdasarka melewatka 1200 Volt kemampua 250 nano d U diperoleh d tegangan 2 Δ C Sehingga r ini ditunjuk 5. Hasil D merupakan Cuk denga PWM yan L1=0,8mH IRF460 1=10µF 6 Rangkaian ke nkan untuk me n arus punc switching s
sar bentuk dan Dengan VOC = maka didapatk konverter dio 3µH maka dipil milihan beban Konverter beke am pemilihan Kcrit merupakan kerja dalam m la K lebih be dengan mod a. Leq merupak lam keadaan c rikut Dengan L1 d , maka N1/N2 ilai D=0 mak <32 ohm. milihan kopone Untuk kompon nis SEMIKRO an datasheet y an tegangan da 41 Ampere, se an reverse reco detik. Untuk kompon dari persamaan 2 mVolt, yaitu: 2 2 2 8 s g c f L C DV V = Δ F C2=1000μ rangkaian kese kkan pada gam
Simulasi siste Diagram simu n sistem MPPT an metode H ng dihasilkan o C1=10µF L2=0,8mH SK eseluruhan Kon enjadi besar, k cak pada in semikonduktor n harganya. = 21,75Volt d kan L1 sebesa operasikan C lih L1=L2= 800 resistansi Rbeb erja dengan m n beban ada 1 n suatu batasa mode DCM sar dari Kcrit m
de CCM, b kan persamaan coupled dengan dan L2 dala bernilai 0 ma ka didapatkan en Dioda nen dioda di ON SKN3F20 yang ada dioda an arus maksi elain itu dioda
overy time yang
nen kapasitor n 2.26 dengan a 2 s f luruhan dari ko mbar 6. em dengan Psi ulasi pada T menggunaka Hill Climbing. oleh metode M C2=100µF KN 3F20/12 + VO nverter Cuk karena dapat nduktor dan , dan akan dan ∆iL1=2.4 ar 453 µH. CCM maka 0 µH. ban mode CCM alah sebagai an konverter atau CCM, maka sistem begitu juga n kondisi L1 n persamaan am keadaan aka, Leq=L1. nilai beban ipilih dioda 0/12, karena a ini mampu imal sebesar ini memiliki g cepat yaitu r C2 dapat asumsi riplle onverter Cuk im gambar 7 an konverter Duty cycle MPPT selalu + OUT berubah sesuai input konver panel s ilumina dapat d seiring membu metode level il dari p ilumian 1000 W 25 dera saat le sebesar Ga mengg Gam meng Gam 0. 10. 20. 30. 40. 50. 60. 70. 80. 90. 100. Ef is ie n si Loa d Fa ct or ηLF (%) h setiap waktu dengan data konveter, s rter akan sam surya.
Dari Gamba asi dari level dilihat bahwa d dengan perub uktikan bahw e Hill Climbin uminasi matah Simulasi di anel surya E nsi matahari d W/m2 dan disi ajat Celcius, s evel iluminasi r 50 Watt. ambar 7 Diagr gunakan Konve mbar 8 Daya k gikuti perubaha mbar 9 Grafik h setiap beban .00 .00 .00 .00 .00 .00 .00 .00 .00 .00 .00 100.00 level Ira u swap mendek dari tegangan sehingga resi ma dengan res ar 8 dengan p 300 W/m2 me daya keluaran k bahan level ilu wa konverter ng dapat meng hari. ilakukan deng l Sol 50 wat dari 200 W/m2 imulasikan den sehingga daya matahari 100 ram simulasi si erter Cuk deng
Climbing keluaran (bawa an daya level il hasil simulasi p n tanpa metode 600.00 adiasi Mataha
kati nilai terten n dan arus pad
istansi intern sistansi intern perubahan lev enjadi 800W/m koverter beruba uminasi. Hal i dengan MPP gikuti perubaha gan pemodela tt dengan lev 2 sampai denga ngan temperat yang dihasilka 00 W/m2 adala istem MPPT gan metode Hil
ah) konverter luminasi (atas) perbandingan e MPPT ari (W/m2) 5 ohm 10 ohm 15 ohm ntu da nal nal vel m2 ah ini PT an an vel an tur an ah ll ) m m m
5
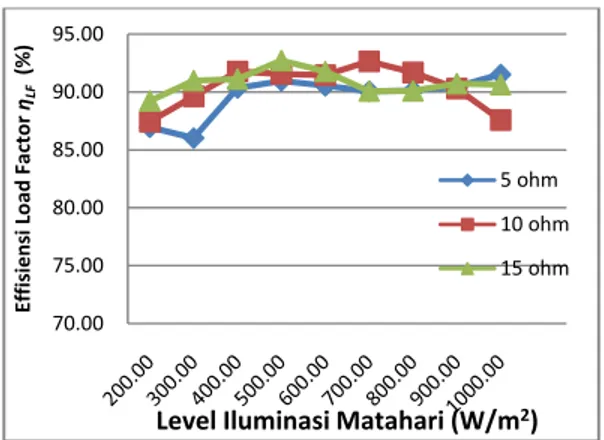
Gambar 10 Grafik hasil simulasi perbandingan
setiap beban dengan metode Hill Climbing
Gambar 9 adalah hasil simulasi data efisiensi dari sistem tanpa metode MPPT. Setiap beban hanya mencapai nilai efisiensi load factor yang tinggi hanya pada level iluminasi matahari tertentu, karena nilai beban mendekati nilai resistansi internal panel surya. Dibandingkan dengan sistem dengan metode MPPT Hill climbing nilai efisiensi load dengan beban yang berbeda-beda semuanya mendekati maksimum.
6. Hasil Pengujian Sistem Metode MPPT
Pengujian ini dirangkai dengan panel surya yang terhubung langsung ke beban. Pengujian ini ditujukan untuk mendapatkan data daya maksimum panel surya pada level iluminasi tertentu dan juga untuk mengetahui daya yang diserap beban tanpa sistem MPPT serta untuk mengetahui resistansi internal dari panel surya El
Sol 50 Watt.
Pengujian sistem MPPT dengan metode Hill Climbing dilakukan pada level iluminasi matahari 683 W/m2 sampai dengan 757 W/m2.Perubahan
signifikan terjadi pada beban 15 ohm karena pada saat pengukuran tanpa sistem MPPT nilai resistansi internal panel lebih kecil dibandingkan resistansi beban, sehingga beban tidak menyerap daya yang maksimum.
Gambar 11 Pengujian Sistem MPPT menggunakan
konverter Cuk dengan metode Hill Climbing
Tabel 3 Perbandingan daya terukur antara sistem
tanpa MPPT dengan sistem MPPT
BEBAN LEVEL ILUMINASI (W/m2) TANPA MPPT (Watt) DENGAN MPPT (Watt) KENAIKAN (%) 5 OHM 683 22.11 23.20 4.70 718 22.94 24.31 5.64 757 24.31 24.99 2.72 10 OHM 683 20.25 22.25 8.99 718 20.14 24.06 16.29 757 20.16 25.31 20.35 15 OHM 683 15.49 22.37 30.76 718 15.50 23.59 34.29 757 15.59 24.53 36.45 mpp 15,28 V 13,48 V 15,59 W 32,63 W 1,86 A 1,02 A Sistem tanpa MPPT Sistem MPPT 24,53 W
Gambar 12 perbandingan titik kerja sistem
dengan beban 15 ohm dan level iluminasi 757 W/m2
Gambar 12 memperlihatkan perbedaan titik kerja antara sistem MPPT dengan sistem tanpa MPPT pada kurva karakteristik panel surya dengan beban 15 ohm dan level iluminasi 757 W/m2. 7. Kesimpulan
Hasil pengukuran mendapatkan efisiensi alat yang dibuat mencapai 76,66 %. Dalam pembuatan sistem MPPT menggunakan konverter
Cuk dengan metode Hill Climbing ini masih
terdapat ketidaksempurnaan dalam rangkaian konverter yang dibuat. Dalam pemilihannya, mosfet IRF460 dapat bekerja pada range arus 0 – 20 Ampere dengan tegangan breakdown sebesar 400 Volt. Dalam hal ini sebenarnya sudah dapat memenuhi kebutuhan dari kondisi rangkaian saat beroperasi. Tetapi pada saat pengoperasiannya mosfet bekerja pada temperatur yang tinggi sehingga mengakibatkan losses yang besar.
8. Daftar Pustaka
[1] V. Mummadi, “Power Tracking for Nonlinier PV Sources with Coupled Inductor SEPIC Converter”, IEEE Trans. Aerospace and
Electronics System, Vol.41, No. 3, July 2005.
[2] Henry Shu-H.C, K. K. Tse, Ron Hui S. Y. “A Novel Maximum Power Point Tracking Technique for Solar Panel Using a SEPIC or
70.00 75.00 80.00 85.00 90.00 95.00 Effisiens i Lo ad Fac tor ηLF (%) Level Iluminasi Matahari (W/m2) 5 ohm 10 ohm 15 ohm
Cuk Converter”,IEEE Trans Power Electron, Vol. 18, No. 3, May 2003.
[3] Rashid, M.H, "Power Electronics Handbook", Academic Press. Canada, 2001.
[4] G.J. Yu,Y.S. Yung, J.Y. Choi, G.S. Kim, “A Novel two-mode MPPT control Algorithm based on comparative study of existing algoritms”,Science Direct Solar energy, 2004. [5] Peftitsis D., Adamidis G., Balouktsis A., “A
New MPPTMethod for Photovoltaic Generation Systems Based on Hill Climbing Algorithm”, IEEE on Electrical Machines,
2008.
[6] E. Duran, J.M. Enrique, M.A. Bohorquez, “A new Application of the Coupled-Inductors SEPIC Converter to obtain I-V and P-V Curves of Photovoltaic Modules” Proc. IEEEAPEC, 2001
[7] G. Wei, Z. Dongbing, “designing a SEPIC Converter”, National Semiconductor Application Note, April 2008
9. Riwayat Penulis
Dianggoro Darmawan, dilahirkan di Jember tanggal 13 Mei 1986. Pendidikan dari masa TK sampai pada masa SMA dihabiskan penulis di Kabupaten Jember. Riwayat pendidikan penulis adalah sebagai berikut :
1. Taman Kanak-kanak HAVEA Jember 2. SDN Kebonsari II Jember.
3. SLTP Negeri 10 Jember 4. SMU Negeri 3 Jember
5. D3 Computer Control FTI ITS Surabaya. Ketertarikan dalam bidang elektro dimulai penulis sejak masa SMP dengan karya pertama yaitu bel listrik.