1 I.1. Latar Belakang
Sekarang ini teknologi GNSS berkembang dengan pesat baik dari segi metode pengamatan, efisiensi, ketelitian maupun jangkauannya. Berawal dari metode statik yang proses pengolahannya dilakukan setelah pengamatan selesai atau yang sering disebut dengan metode post-processing, kemudian berkembang metode pengamatan kinematik antara lain rapid static, stop and go dan pseudo-kinematic. Pengamatan menggunakan metode statik dapat memberikan ketelitian yang lebih tinggi yang bisa mencapai fraksi (mm) namun memerlukan waktu yang lama. Berbeda dengan metode pengamatan kinematik yang membutuhkan waktu yang lebih singkat, namun untuk ketelitian hanya mencapai fraksi (dm). Sekarang ini berkembang metode RTK (Real Time Kinematic) yang mempunyai kemampuan penentuan posisi secara real
time dengan teliti (cm). Metode RTK merupakan metode pengamatan relatif dengan
menggunakan data fase yang posisinya diperoleh secara differensial saat pengamatan secara real time yang dikirimkan dari base ke rover. Metode RTK dibedakan menjadi 2, yaitu RTK UHF dan RTK NTRIP. Dari kedua metode tersebut dapat memberikan ketelitian dengan fraksi (cm), namun untuk metode RTK UHF hanya dapat mencapai jangkauan 1-2 km dari base.
Saat ini telah dikembangkan system CORS (Continually Operating Reference
Station) yang merupakan stasiun referensi yang beroperasi secara terus-menerus
sehingga dapat digunakan sebagai acuan dalam penentuan posisi GNSS secara
real-time maupun post-processing. Metode yang digunakan dalam system CORS adalah
RTK NTRIP (Real Time Kinematic-Networked Transported of RTCM via Internet
Protocol) adalah sebuah metode pengukuran menggunakan GNSS Geodetik dengan
cara mengirimkan koreksi data GNSS dalam format RTCM (Radio Technical
Commission for Maritime Service) melalui internet sehingga dapat ditentukan
koordinat posisi secara real-time.
Seiring berjalannya waktu, sistem CORS di Indonesia terus berkembang dan mulai dikenal oleh masyarakat terutama yang berkecimpung dalam dunia survei
pemetaan karena dapat digunakan secara optimal dalam survei pemetaan. Salah satu stasiun CORS yang ada di Indonesia adalah CORS GMU1 yang berada di area Teknik Geodesi UGM. CORS GMU1 diresmikan oleh Menteri Pekerjaan Umum pada tanggal 27 Juni 2009 dan telah secara aktif berfungsi sebagai stasiun referensi yang menyediakan layanan untuk berbagai aplikasi penentuan posisi serta navigasi berbasis teknologi GNSS. Saat ini CORS GMU1 secara kontinyu menyediakan layanan data RINEX dalam beberapa sampling rate dan streaming NTRIP untuk aplikasi RTK dan DGPS. CORS GMU1 memproduksi data RINEX dalam beberapa sampling rate yaitu 1 detik, 5 detik dan 30 detik. Data RINEX yang diproduksi oleh CORS GMU1 adalah RINEX versi 2.1. CORS GMU1 secara aktif memancarkan sinyal koreksi RTCM melaui internet atau yang sering disebut dengan NTRIP. Saat ini layanan streaming NTRIP yang dapat diberikan CORS GMU1 adalah sinyal koreksi berformat RTCM (1.x, 2.x, 3.x), CMR, dan CMR+. Layanan CORS GMU1 sudah dicoba dipakai diantaranya untuk pemetaan titik batas dengan bidang tanah (Rahardjo, 2010) pengukuran TDT orde 4 (Sari, 2010). Yang menjadi pertanyaan sekarang adalah seberapa jauh layanan streaming data CORS GMU1 dapat diberikan kepada rover dan seberapa teliti koordinat yang dihasilkan.
Receiver Leica Viva GS08 merupakan salah satu receiver GNSS dari Leica Geosystem. Receiver ini merupakan receiver dual frequency dan mampu menangkap 72 channel (termasuk sinyal GPS L1, L2, L2C dan GLONASS L1, L2) dan mampu menangkap 12 satelit (8 GPS + 4 GLONASS). Terdapat Bluetooth, usb port, internal GSM (SIM card) yang dapat mempermudah dalam pengukuran RTK NTRIP.
Receiver Leica Viva GS08 diharapkan dapat digunakan untuk pengamatan RTK
NTRIP dengan jangkauan yang jauh. Penelitian ini akan mengkaji seberapa tingkat ketelitian dan cakupan jangkauan pengukuran GNSS metode RTK NTRIP dengan menggunakan rover Leica Viva GS08. Permasalahan yang muncul adalah seberapa jauh CORS GMU1 dapat memakai koreksi streaming data ke rover jika rover yang digunakan adalah receiver Leica Viva GS08.
I.2. Identifikasi Masalah
Identifikasi masalah pada penelitian ini adalah CORS GMU1 sudah digunakan dalam berbagai aplikasi, namun masih belum diketahui seberapa besar ketelitian dan jangkauan yang didapatkan dari penentuan posisi GNSS dengan metode RTK NTRIP.
I.3. Pertanyaan Penelitian
Pertanyaan penelitian yang akan dikaji pada penelitian ini adalah seberapa besar ketelitian yang didapat dari stasiun CORS GMU1 dengan jarak 0,25 km; 0,5 km; 1 km; 2 km; 2,5 km; 5 km; 10 km; 15 km; dan 20 km atau sampai pada jarak CORS GMU1 memberi koreksi NTRIP dalam kondisi float pada keempat arah penjuru mata angin (utara, timur, selatan dan barat) dengan metode RTK NTRIP menggunakan receiver Leica Viva GS08.
I.4. Cakupan Penelitian
Cakupan dalam penelitian ini dilakukan agar penelitian lebih terarah dan sesuai dengan tujuan penelitian. Cakupan dalam penelitian ini adalah:
1. Metode penentuan posisi yang digunakan dalam penelitian ini adalah penentuan posisi GNSS metode RTK NTRIP dengan stasiun CORS yang digunakan adalah GMU1.
2. Pengamatan dilakukan menggunakan receiver GPS Leica Viva GS08, dengan sudut elevasi minimum satelit 100 dan interval perekaman 5 detik selama 5 menit pada setiap titik sampel.
3. Data yang digunakan meliputi data pengamatan titik dalam jangkauan dari stasiun CORS GMU1 pada jarak kurang lebih 0,25 km; 0,5 km; 1 km; 2 km; 2,5 km; 5 km; 10 km; 15 km; dan 20 km atau sampai pada jarak CORS GMU1 tidak memberi koreksi streaming data keempat arah penjuru mata angin utama antara lain utara, timur, selatan, dan barat.
I.5. Tujuan
Penelitian ini bertujuan untuk memperoleh tingkat ketelitian dan jarak jangkauan pengukuran RTK NTRIP dengan menggunakan receiver Leica Viva GS08.
I.6. Manfaat Penelitian
Hasil penelitian ini diharapkan dapat digunakan sebagai acuan dalam pengukuran GNSS dengan metode RTK NTRIP dengan menggunakan receiver Leica Viva GS08 kedepannya yang mana jarak dari stasiun CORS dapat dipertimbangkan untuk mendapatkan ketelitian yang tinggi. Sehingga dalam penentuan posisi menggunakan metode RTK NTRIP dapat memberikan manfaat dalam bidang geodesi terutama untuk survei pemetaan dengan jarak yang tertentu untuk mendapatkan ketelitian yang relatif tinggi.
I.7. Tinjauan Pustaka
Pada penelitiannya Mulyawan (2012) tentang Penentuan Koordinat Stasiun GPS CORS GMU1, mendefinisikan ulang koordinat stasiun GMU1 pada tahun 2011. Data yang digunakan yaitu data pengamatan GPS meliouti DOY 121 hingga 149. Penelitian tersebut terdiri dari 4 project dan menghasilkan koordinat kartesi 3D GMU1 sebagai berikut :
Tabel I.1. Koordinat kartesi 3D GMU1
Projek X Y Z project GMU1a -2200206,94608 m ± 0,85 mm 5924895,46055 m ± 1,78 mm -855932,53814 m ± 0,53 mm project GMU1b -2200206,94361 m ± 1,1 mm 5924895,45542 m ± 2,3 mm -855932,53814 m ± 0,62 mm project GMU1c -2200206,94766 m ± 1,01 mm 5924895,46742 m ± 1,86 mm -855932,54013 m ± 1,73 mm project GMU1d -2200206,93186 m ± 1,94 mm 5924895,42781 m ± 4,03 mm -855932,5355 m ± 1,15 mm Hal ini berbeda secara signifikan terhadap koordinat GMU1 pada saat pendefinisian pertama kali. Project GMU1a digunakan sebagai nilai koordinat stasiun GPS CORS GMU1 pada tahun 2011 dikarenakan memiliki ketelitian paling tinggi.
Pada penelitian tentang perbandingan penentuan posisi GPS metode Radial dan RTK NTRIP pada kasus short baseline yang dilakukan oleh Mahyeda (2011), yang dilakukan di daerah Sleman dengan menggunakan 5 buah titik didapatkan perbandingan perbedaan data ketelitian antara penentuan posisi dengan menggunakan metode radial dan RTK NTRIP. Ketelitian posisi horizontal dan vertikal metode radial sebesar 0,002 m dan 0,003 m. Sedangkan ketelitian posisi horizontal dan vertikal metode RTK NTRIP sebesar 0,010 m dan 0,018 m. Keakuratan posisi horizontal dan vertikal metode radial sebesar 0,010 m dan 0,022 m. Sedangkan keakuratan posisi horizontal dan vertikal metode RTK NTRIP sebesar 0,023 m dan 0,195 m. Sehingga dapat disimpulkan penentuan posisi menggunakan metode radial lebih teliti dibandingkan dengan metode RTK NTRIP.
Sari (2010) melakukan pengujian tentang studi penggunaan metode RTK NTRIP dengan tiga buah provider mobile internet protokol antara lain Tekomsel, XL, dan Indosat untuk pengukuran titik dasar teknik orde 4. Penelitian dilakukan untuk mengetahui kinerja dari ketiga provider tersebut dalam melakukan pengukuran dengan metode RTK NTRIP. Hasil penelitian dari ujicoba hipotesis komparatif dua sampel menunjukkan bahwa pergeseran lateral dari ketiga provider tersebut tidak ada perbedaan yang signifikan pada nilai easting tetapi pada nilai northing terdapat perbedaan yang signifikan terutama untuk provider Telkomsel.
Fajari (2011) melakukan penelitian tentang ketelitian penentuan posisi metode RTK NTRIP menggunakan single base dan network enhanced single base untuk
baseline pendek (< 20 km) dan baseline panjang (> 20 km). Pengukuran single base
RTK dan NRTK dilakukan di dua titik kontrol yang mewakili jarak baseline panjang dan pendek tersebut dengan pengamatan selama ± 45 menit dengan sampling rate 5 detik dan mask angle 150. Pengukuran RTK NTRIP menggunakan stasiun CORS GMU1 sedangkan NRTK menggunakan layanan Checkpoint. Hasil dari pengamatan di titik N-0005 adalah 0,0103 m untuk ketelitian posisi horisontal dan 0,0189 m untuk ketelitian posisi vertikal. Sedangkan untuk titik T 11.17.040 adalah 1,1881 m untuk ketelitian posisi horisontal dan 1,0185 m untuk ketelitian posisi vertikal. Untuk
baseline pendek, ketelitian network enhanced single base RTK berbeda signifikan
network enhanced single base RTK masih lebih baik dari kualitas penentuan posisi
metode dengan solusi single base RTK
Putra (2011) melakukan penelitian tentang penyusunan sistem pemantauan visual dan tool reset receiver serta pembuatan tool interaktif pengukuran jarak pada
website layanan CORS GMU1. Penelitian yang dilakukan adalah melakukan
pembuatan website CORS GMU1 untuk tool estimasi jarak base stasiun CORS GMU1 ke lokasi survey terkait dengan kualitas solusi NTRIP yang akan didapat. Dalam pengujian pengamatan visual, realtime dan jarak jauh menunjukkan tool reset
receiver berfungsi dengan baik dan dilakukan perbandingan jarak dengan
menggunakan Geographic Calculator dan Google Maps. Pengukuran dilapangan menggunakan receiver Javad Triumph 1 dengan metode RTK NTRIP. Hasil pengujian tool pengukur jarak estimasi terhadap sepuluh titik sampel menunjukkan bahwa nilai selisih jarak terbesar dari produk dengan Geographic Calculator 5.2 adalah 5,527 meter, sedangkan jarak terbesar dari Google Maps dengan Geographic Calculator 5.2 adalah 102,674 meter. Hasil pengujian menunjukkan bahwa produk berhasil digunakan untuk mengukur estimasi jarak dari base station GMU1 ke lokasi survey dengan nilai jarak yang lebih tepat dari pada menggunakan tool pengukuran jarak pada Google Maps.
I.8. Landasan Teori I.8.1. GNSS (Global Navigation Satellite System)
GNSS merupakan teknologi penentuan posisi yang menggunakan satelit yang berbeda beda untuk penentuan posisi. Satelit GNSS yang ada saat ini antara lain GPS milik Amerika Serikat, GALILEO milik Eropa, GLONASS milik Rusia, dan COMPASS milik Cina. Sistem GNSS terdiri dari tiga segmen antara lain segmen angkasa (space segment) terdiri dari satelit-satelit yang dimiliki GNSS, segmen sistem control (control system segment) terdiri atas stasiun kontrol yang mengendalikan GNSS dari bumi dan segmen pengguna (user segment) yang merupakan pengguna GNSS termasuk alat yang digunakan serta data GNSS.
I.8.1.1. GPS (Global Positioning System)
GPS adalah satelit navigasi milik Amerika Serikat dan memiliki 24 satelit yang berada di luar angkasa dengan memiliki 6 lintasan orbit yang nantinya memancarkan gelombang radio sehingga diterima oleh pengguna di bumi. Orbit dari satelit GPS memiliki jarak antar orbit sebesar 600 dengan inklinasi sebesar 550 relatif terhadap ekuator. Prinsip GPS secara umum memancarkan sinyal yang berfungsi untuk memberikan informasi tentang posisi satelit yang diamat, jarak dari satelit ke
receiver dan waktu, serta kesehatan satelit yang diamat.
Setiap satelit GPS memancarkan sinyal dan mengirimkan data-data yang diperlukan untuk penetuan posisi, kecepatan maupun waktu yang nantinya akan ditangkap oleh rover untuk menentukan (Abidin, 1994) :
a. Waktu pentransmisian sinyal dari satelit b. Posisi satelit
c. Kesehatan satelit d. Koreksi jam satelit
e. Efek refraksi ionosfir (untuk pengamatan dengan receiver satu frekuensi) f. Status konstelasi satelit
Dari sinyal GPS yang dipancarkan tersebut dapat dibagi atas tiga komponen, yaitu (Abidin, 2000) :
1. Gelombang pembawa (carrier wave) yang terdiri dari dua gelombang pembawa L1 (Link 1) dengan frekuensi 154 f0 = 1575,42 Mhz (panjang gelombang = 19,05cm) dan L2 (Link 2) dengan frekuensi 120 f0 = 1227,60 Mhz (panjang gelombang = 24,25 cm) yang bertugas membawa pesan navigasi dari satelit ke pengguna. Gelombang L1 membawa P(Y), kode-C/A, dan pesan navigasi sedangkan gelombang L2 membawa kode-P(Y) dan pesan navigasi.
2. Penginformasi posisi satelit (navigation message) memberikan informasi tentang posisi dan kesehatan satelit serta informasi-informasi yang lainnya antara lain koefisien koreksi jam satelit, parameter orbit, almanak satelit, dan parameter koreksi ionosfer.
3. Komponen penginformasi jarak (kode) yang berupa kode kode-P(Y) dan kode-C/A. Kode ini terdiri dari angka biner (1 dan 0) yang unik setiap satelit GPS sehingga receiver GPS dapat mengamati dan membedakan sinyal-sinyal dari satelit. Jarak dari satelit ke receiver GPS di dapat dari kode-kode tersebut.
I.8.1.2. GLONASS (Global Navigation Satellite System)
GLONASS adalah sistem navigasi satelit milik Rusia dan dioperasikan oleh
Coordination Scientific Information Center (KNITs) Pemerintah Rusia untuk Russian Space Forces (angkatan ruang angkasa Rusia). Satelit GLONASS
merupakan alternatif atau pelengkap dari satelit GPS, COMPASS dan GALILEO yang terintegrasi pada sistem GNSS. GLONASS dirancang untuk keperluan militer dan sipil.
GLONASS dimulai sejak tahun 1976 di Uni Soviet. Roket pertama yang diluncurkan pada tanggal 12 Oktober 1982 dan penambahan satelit lainnya selesai pada tahun 1995. GLONASS mengalami keterpurukan karena runtuhnya perekonomian Rusia, sehingga pada tahun 2000-an Pemerintah Rusia memprioritaskan untuk pemulihan sistem dengan memakan biaya yang sangat besar. Pada tahun 2010, GLONASS tercatat memiliki 22 satelit yang telah mencapai cakupan 100% dari wilayah Rusia namun hanya 16 satelit yang berfungsi. Peluncuran satelit masih terus dilakukan dan diharapkan selesai pada tahun 2011.
GLONASS saat ini memiliki 24 satelit yang memiliki 3 lintasan orbit dengan 8 satelit pada setiap obitnya. Tiga bidang orbit memiliki inkliasi sebesar 64,80. Tinggi orbit satelit GLONASS ada pada jarak 19100 km dengan periode orbit selama 11 jam 15 menit.
I.8.2. Bias dan kesalahan
Semua pengukuran GNSS tidaklah bebas dari kesalahan dan bias baik penggunaan data pseudorange maupun data fase. Bias didefinisikan sebagai perbedaan antara nilai pengukuran dengan nilai sebenarnya, disebabkan oleh kesalahan sistematik yang dapat dimodelkan. Kesalahan merupakan bias yang tidak dapat dimodelkan. Kesalahan dan bias ini ada yang berkaitan dengan satelit (seperti
kesalahan ephemeris, jam satelit dan selective availabilty), medium propagasi (seperti bias ionosfir dan bias troposfir), receiver GNSS (seperti kesalahan jam
receiver, kesalahan antena dan noise), data pengamatan (ambiguitas fase dan cycle slip), dan lingkungan sekitar receiver GNSS (seperti multipath).
Kesalahan dan bias GNSS tersebut harus diperhitungkan secara teliti karena besarnya kesalahan dan bias akan mempengaruhi terhadap ketelitian hasil pengamatan yang dilakukan. Strategi pengamatan yang diaplikasikan juga akan mempengaruhi efek dari kesalahan dan bias pada data pengamatan, demikian juga sebaliknya. Struktur dan tingkat kecanggihan dari perangkat lunak pemroses data akan dipengaruhi oleh mekanisme yang digunakan dalam menangani kesalahan dan bias (Abidin, 2000).
Secara umum ada beberapa cara dan strategi yang dapat digunakan untuk menangani kesalahan dan bias GNSS, antara lain sebagai berikut (Abidin, 2000):
a. Estimasi parameter dari kesalahan dan bias dalam proses hitung perataan. b. Terapkan mekanisme diferensial antar data.
c. Hitung besarnya kesalahan/bias berdasarkan data ukuran langsung. d. Hitung besarnya kesalahan/bias berdasarkan model.
e. Gunakan strategi pengamatan yang tepat. f. Gunakan strategi pengolahan data yang tepat. g. Abaikan.
Pada survei GPS, pereduksian efek dari kesalahan dan bias tersebut biasanya dilakukan dengan mekanisme diferensial antar data, pemendekan panjang baseline yang diamati, maupun dengan menggunakan strategi pengamatan serta pengolahan data yang tepat.
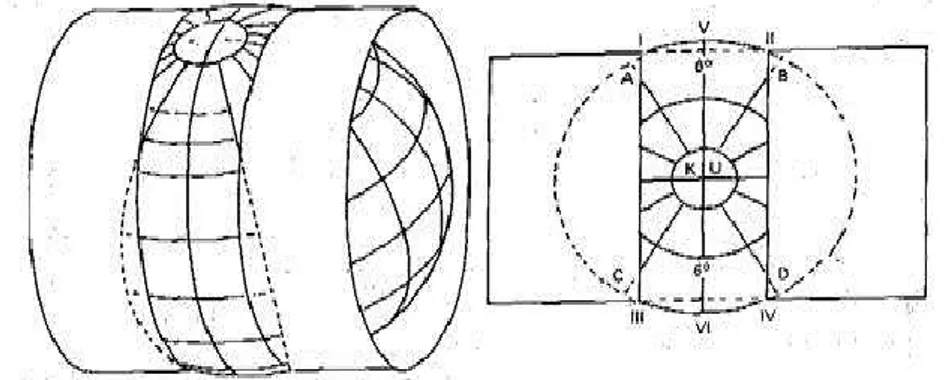
I.8.3. UTM (Universal Transverse Mercator)
UTM adalah sistem proyeksi global yang memiliki ciri-ciri sebagai berikut (Prihandito, 2010) :
a. Silinder, transversal, secant, conform;
b. Memotong bola bumi di dua meridian standar, k = 1; c. Lebar zona 60 sehingga bumi dibagi dalam 60 zona;
d. Meridian tengah tiap zona k = 0,9996; e. Ellipsoid referensi GRS 67;
f. Absis semu (T) : 500000 m ± X; g. Ordinat semu (U) : 10000000 m – Y.
Sistem koordinat UTM dibagi menjadi 60 zona, masing-masing zona mempunyai lebar 60 dimulai dari meridian 1800 BB dan 1740 BB sampai zona 60. Batas pararel tepi atas dan tepi bawah pada 840 LU dan 800 LS. Keuntungan dari ststem koordinat ini adalah menggunakan sistem koordinat global (seluruh dunia) sehingga jika suatu daerah sudah diketahui diketahui latitude dan longitude-nya maka dapat dengan mudah menggabungkan peta satu dengan peta yang lainnya. Namun sistem proyeksi ini memiliki kelemahan yaitu terletak dalam pembagian zonanya, karena sering terjadi suatu wilayah terletak pada zona yang berbeda.
Gambar I.1 Kedudukan silinder terhadap bola bumi (Prihandito, 2010)
I.8.4. Ketelitian Pengukuran
Ketelitian atau presisi adalah tingkat kedekatan nilai ukuran terhadap nilai lainnya. Dalam hal ini ketelitian didefinisikan sebagai tingkat kedekatan hasil pengukuran yang berulang terhadap obyek yang sama. Jika hasil itu berdekatan, maka disebut ketelitian tinggi, jika hasil itu terpaut jauh, maka disebut memiliki ketelitian yang rendah. Ketelitian diindikasikan dengan penyebaran dari distribusi kemungkinan, semakin kecil distribusinya maka ketelitiannya semakin tinggi dan sebaliknya (Michail and Gracie dalam Tarigan, 2010). Nilai ketelitian ditunjukkan pada nilai standar deviasi pengukuran. Perhitungan simpangan baku dapat dilakukan dengan rumus sebagai berikut :
√
………(1.1)√
………(1.2) Keterangan : = simpangan baku, x1 = nilai ukuran ke i,x = nilai rerata hasil ukuran, n = jumlah ukuran.
Rumus 1.1 digunakan untuk menghitung data yang berupa populasi sedangkan untuk data sampel menggunakan rumus 1.2.
Ketelitian posisi yang dapat dengan pengamatan GPS secara umum akan bergantung pada empat factor yaitu (Abidin, 2000) :
a. metode penentuan posisi yang digunakan,
b. geometri dan distribusi dari satelit-satelit yang diamati, c. ketelitian data yang digunakan,
d. strategi/ metode pengolahan data yang diterapkan.
I.8.5. Metode-penentuan posisi dengan GNSS
Konsep dasar dari penentuan posisi dengan GNSS adalah space resection (pemotongan kebelakang) dengan jarak, yaitu dengan pengukuran jarak ke beberapa satelit GNSS yang telah diketahui koordinatnya, dengan pengamatan secara simultan ke minimal 4 buah satelit untuk mendapatkan tiga parameter posisi dan satu parameter waktu. Jarak tersebut tidak dapat diukur langsung, tetapi dengan jalan mengukur besaran lain yaitu waktu rambat sinyal dari satelit ke stasiun pengamatan. Posisi yang diberikan oleh GNSS adalah posisi tiga dimensi (X, Y, Z ataupun φ, λ, h) yang dinyatakan dalam datum WGS (World Geodetic System) 1984 (Abidin, 2000). Dalam penentuan posisi menggunakan GNSS, dikenal dua metode penentuan posisi secara umum, antara lain metode penentuan posisi secara absolute dan metode
relative. Metode penentuan posisi secara absolute atau yang lebih dikenal dengan point positioning merupakan penentuan posisi suatu titik secara mandiri dimana
suatu posisi suatu titik direferensikan terhadap pusat dari sistem koordinat. Metode ini merupakan desain awal dari penentuan posisi dengan teknologi GNSS. Dalam penentuannya, posisi titik yang ditentukan tidak bergantung pada titik lainnya, maka
receiver yang digunakan hanya satu buah. Sedangkan metode penenntuan posisi
secara relative pada dasarnya adalah pengamatan posisi satelit GNSS dalam konstelasi yang sama secara bersamaan dengan rentang waktu yang sama dan bertujuan untuk menentukan posisi relatif dua atau lebih stasiun pengamatan serta menentukan jarak antara dua stasiun atau lebih yang dikenal dengan jarak basis (baseline). Dalam metode ini posisi suatu titik ditentukan relatif terhadap titik lain yang sudah diketahui koordinatnya.
Dari kedua penentuan posisi secara absolute dan relative dijabarkan menjadi beberapa metode penentuan posisi antara lain pengukuran posisi metode statik, penentuan posisi yang proses pengolahannya dilakukan setelah pengamatan selesai atau yang sering disebut dengan metode post-processing dari pengukuran posisi dengan menggunakan statik, kemudian berkembang menjadi metode pengamatan kinematik antara lain rapid static, stop and go dan pseudo-kinematic. Pengamatan menggunakan metode statik dapat memberikan ketelitian data yang lebih tinggi yang bisa mencapai fraksi milimeter (mm) namun memerlukan waktu yang lama. Berbeda dengan metode pengamatan kinematik yang membutuhkan waktu yang lebih singkat, namun untuk ketelitian hanya mencapai fraksi desimeter (dm). Kemudian berkembang menjadi metode RTK (Real Time Kinematic) yang diharapkan menjadi solusi permasalahan yang ada. Metode RTK merupakan metode pengamatan relatif dengan menggunakan data fase yang posisinya diperoleh secara diferensial saat pengamatan secara real time yang dikirimkan dari base ke rover. Metode RTK dibedakan menjadi 2, yaitu RTK UHF dan RTK NTRIP. Dari kedua metode tersebut dapat memberikan ketelitian dengan fraksi centimeter (cm), namun untuk metode RTK UHF hanya dapat mencapai jangkauan 1-2 km dari base. Saat ini telah dikembangkan system CORS (Continually Operating Reference Station) yang merupakan stasiun referensi yang beroperasi secara terus-menerus sehingga dapat digunakan sebagai acuan dalam penentuan posisi GNSS secara real-time maupun
I.8.6. RTK
Penentuan posisi secara RTK adalah pengukuran posisi secara relative dengan menggunakan satu (receiver) yang digunakan sebagai base station pada titik yang telah diketahui koordinatnya dan receiver yang lainnya digunakan sebagai rover dalam keadaan bergerak maupun diam. RTK merupakan metode yang akurat untuk penentuan posisi dalam waktu yang singkat berbasiskan diferensial data code dan
carrier phase. Diferensial data code dan carrier phase digunakan untuk penentuan
posisi yang diinginkan.
Penggunaan data kode dan fase dalam penentuan posisi secara RTK memerlukan receiver dual frequency. Karakteristik dalam pengukuran RTK adalah saling terintegrasi alat-alat GNSS yang digunakan untuk mendapatkan ketelitian yang tinggi dalam fraksi centimeter. Base station mampu untuk mentransmisikan data pseudorange dan carrier phase serta data koreksi secara real time yang nantinya data tersebut diterima oleh rover untuk penentuan posisi secara akurat.
Ada 3 jenis solusi pengukuran pada metode RTK, antara lain : 1. Fix
Rover sudah terhubung dengan base station, memiliki ketelitian posisi 1 – 5
cm, ambiguitas fase sudah terkoreksi, jumlah satelit yang ditangkap > 4, bias
multipath terkoreksi.
2. Float
Rover sudah terhubung dengan base station, memiliki ketelitian posisi > 5
cm, ambiguitas fase belum terkoreksi, jumlah satelit yang ditangkap <= 4, bias multipath belum terkoreksi.
3. Standalone
Rover tidak terhubung dengan base station, memiliki ketelitian posisi > 1 m,
ambiguitas fase belum terkoreksi, jumlah satelit yang ditangkap <= 4, bias
multipath belum terkoreksi.
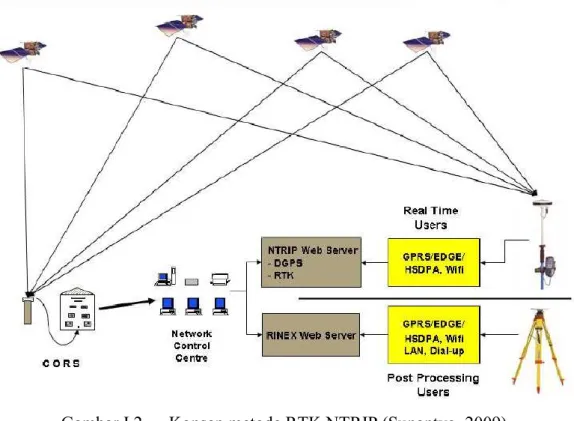
I.8.7. RTK NTRIP
RTK NTRIP adalah sebuah metode pengukuran dengan menggunakan GNSS Geodetik dengan cara mengirimkan koreksi data GNSS dalam format RTCM melalui
internet sehingga dapat ditentukan koordinat posisi secara real time. NTRIP dikembangkan untuk aplikasi yang menggunakan transmisi protocol yang berbasis HTTP (Hyper Text Transfer Protocol) yang nantinya digunakan sebagai transfer data. Pengukuran NTRIP dibutuhkan sebuah sim card yang nantinya digunakan untuk koneksi ke internet.
Gambar I.2 Konsep metode RTK NTRIP (Sunantyo, 2009) NTRIP terdiri dari empat komponen sistem yaitu (Hapsoro, 2010) :
1. NTRIP Source
NTRIP Source merupakan proses penyediaan data GNSS secara kontinyu seperti streaming data dari antena GNSS ke NTRIP Server.
2. NTRIP Server
NTRIP Server mentransfer data RTCM kepada NTRIP Caster menggunakan jaringan TCP/IP. NTRIP Server perlu diseujui terlebih dahulu oleh NTRIP
Caster dan jika diijinkan maka data RTCM dapat dikirim ke NTRIP Caster.
NTRIP Server juga mengidentifikasi nama NTRIP Source dan parameter informasi lainnya yang berhubungan dengan NTRIP Source.
NTRIP Caster adalah sebuah server internet yang mengatur dan membedakan kemana dan dari mana aliran data NTRIP Server. Caster memeriksa pesan permintaan dari NTRIP Client dan Server memeriksa apakah Client Server sudah teregistrasi dan sah untuk menerima atau memberikan aliran data RTCM.
4. NTRIP Client
NTRIP Client menerima streams data RTCM, NTRIP Client terlebih dahulu harus diterima oleh NTRIP Caster, jika diterima maka NTRIP Client akan menerima data GNSS dari NTRIP Caster. Untuk mendapatkan data RTCM,
client harus mengirim parameter yang diakses (pengguna ID dan password)
pada NTRIP Caster.
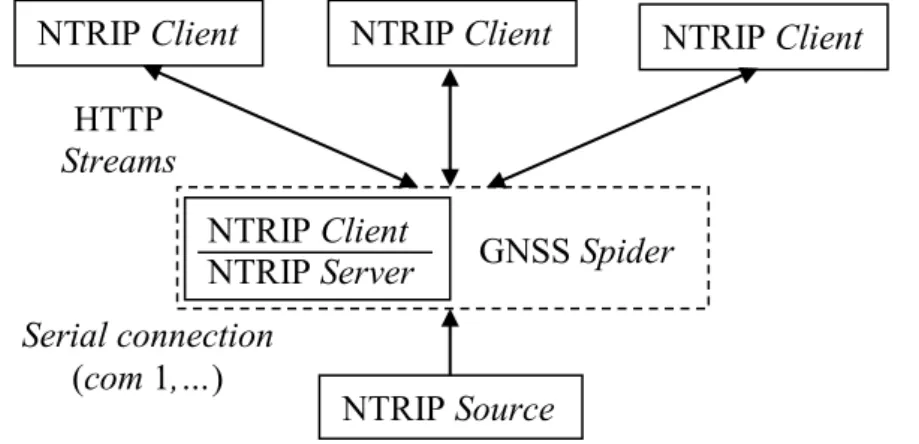
Berikut akan digambarkan susunan sistem komponen NTRIP (gambar I.3) :
Gambar I.3 Sistem komponen NTRIP (Charles dalam Hapsoro, 2010)
I.8.8. TCP/IP (Transmission Control Protocol/Internet Protocol Address)
TCP/IP adalah sekumpulan protokol yang didesain melakukan fungsi
komunikasi pada Wide Area Network (WAN). TCP/IP terdiri dari sekumpulan protokol yang masing-masing bertanggung jawab atas bagian-bagian tertentu dari komunikasi data. Protokol ini berfungsi untuk komunikasi dalam internet. Protokol ini memungkinkan sistem apapun yang terhubung kedalamnya bisa berkomunikasi dengan sistem lain tersebut bekerja (Hapsoro, 2006)
HTTP
Streams
Serial connection
(com 1,…)
NTRIP Client NTRIP Client NTRIP Client
NTRIP Client
NTRIP Server GNSS Spider
I.8.8.1. IP (Internet Protocol) Address
IP Address adalah suatu penomoran deretan angka biner antara 32-bit sampai
128-bit yang dipakai sebagai alamat identifikasi untuk tiap komputer host dalam jaringan Internet. IP Address berfungsi untuk menyampaikan paket data ke alamat yang tepat maka dari itu peranan Internet Protokol sangat penting dari jaringan TCP dan IP. IP Address yang sering digunakan ini menggunakan basis TCP/IP karena lebih sederhana, dan lebih mudah untuk di mengerti. IP Address sendiri dibagi menjadi 2, yaitu IP Address Private dan IP Address Public. IP Address Private biasanya didaptkan oleh pengguna user rumahan atau sekala kecil. IP Address
Private ini didapatkan setelah melakukan Subnetting. Sedangkan untuk IP Address Public biasanya dimiliki dalam skala besar, seperti Hosting, ISP, data center, dan
perusahaan Web.
I.8.8.2. Format alamat IP
IP Address merupakan deretan angka biner antara 32-bit sampai 128-bit yang
dipisahkan oleh tanda pemisah berupa titik pada setiap 8-bit. Tiap 8-bit ini disebut
octet. IP yang berupa 32-bit terdiri dari subnet dan host. Bentuk IP Address adalah
sebagai berikut :
xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx contoh :
11100111000100110000001101110000
Pengalamatan 32 bit selanjutnya dibagi secara khusus ke dalam empat octet (8 bit
section) :
11100111 00010011 00000011 01110000
139 17 9 112
Selanjutnya untuk memudahkan pembacaan, masing-masing octet dapat diterjemahkan kedalam bilangan decimal dengan range 0 sampai dengan 255 : 139.17.9.112.
Berikut adalah IP Network yang tersedia sekarang ini (Lenz dalam Koesoma, 2008) : 1. GSM (Global System for Mobile Communication) yaitu jaaringan selular
umum digital yang menggunakan teknik multiplexing dan band transmisi sekitar 900 MHz dan merupakan standar dunia. Jaringan GSM selain
membawa data layanan telepon juga dapat membawa komunikasi data dalam mode sirkuit dan paket data. Versi yang ada menggunakan 1800 – 1900 MHz
band.
2. GPRS (General Packet Radio Service) merupakan suatu sistem global untuk komunikasi secara mobile yang meningkatkan kecepatan channel dari 9600 menjadi 14400 bits per detik, dengan ditambahkan kompresi data dengan GPRS, transmisi data mobile bisa lebih cepat menjadi 115000 bps menggunakan infrastruktur GSM yang sudah ada.
3. CDMA (Code Division Multiple Access) adalah teknologi spectrum lebar yang mengijinkan pemakaian untuk menempati frekuensi dan dalam waktu yang bersamaan dalam suatu band/space yang tersedia. CDMA menugaskan kode unik ke tiap-tiap komunikasi untuk membedakan komunikasi satu dengan lainnya di dalam spektrum yang sama.
4. EDGE (Enchanced Datarate for Gobal Evolution) adalah skema modulasi baru yang lebih efisien penggunaan bandwith pada jaringan GSM standar. Modul tersebut disebut dengan 8PSK (8 Phase Shift Keying modulation) dimana tiap pulse dapat membawa 3 bit dari informasi, dibandingkan dengan GPRS yang hanya bisa membawa 1 bit tiap pulse. Bias meningkatkan transmisi data pada GSM standar menjadi 384000 kbps (3 kali GPRS)
5. UMTS (Universal Mobile Telephone System) adalah generasi ke tiga dari komunikasi mobile sistem di Eropa. Spectrum UMTS berkisar antara 1900 MHz sampai 2025 MHz dan 2110 MHz sampai 2200 MHz. Fasilitas satelit juga telah ada. UMTS berbasiskan pada multimedia dimana bisa mentransfer pembicaraan, gambar dan data maksimum 2 mbps melalui jaringan GSM standar yang telah ada.
I.8.9. CORS
CORS merupakan stasiun referensi yang beroperasi secara terus-menerus sehingga dapat digunakan sebagai acuan dalam penentuan posisi GNSS secara
real-time maupun post-processing. CORS di Indonesia pertama kali dioperasikan oleh
BAKO); Medan, Sumatera Utara (stasiun SAMP); dan Parepare, Sulawesi Selatan (stasiun PARE) (Matindas and Subarya, 2009). Bakosurtanal memperluas stasiun CORS hingga pada Oktober 2009 telah berdiri 51 stasiun CORS yang tersebar di seluruh Indonesia. BPN dan LIPI mulai membangun jaringan stasiun CORS sendiri. Stasiun CORS digunakan untuk sebagai referensi untuk survei dan pemetaan menggunakan GNSS. Penggunaan sistem CORS pada pengukuran GNSS bertujuan untuk mengurangi distorsi dari sinyal yang ditangkap oleh receiver GNSS dan memaksimalkan perhitungan kualitas posisi sesuai dengan model yang digunakan dalam pemrosesan data GNSS sehingga data yang didapatkan memiliki akurasi yang cukup tinggi.
I.8.10. Stasiun CORS GMU1
Salah satu stasiun CORS di Indonesia adalah stasiun CORS GMU1 yang terletak di Jurusan Teknik Geodesi Fakultas Teknik UGM. Stasiun CORS GMU1 diresmikan oleh Menteri Pekerjaan Umum 27 Juni 2009 dan telah secara aktif berfungsi sebagai stasiun referensi yang menyediakan layanan untuk berbagai aplikasi penentuan posisi serta navigasi berbasis teknologi GNSS. Stasiun CORS GMU1 dipasang di atas gedung Teknik Geodesi UGM dan merupakan rangkaian dari
hardware dan software yang berasal dari pabrikan yang berbeda. Spesifikasi hardware dan software yang digunakan oleh stasiun CORS GMU1 adalah sebagai
berikut :
Antena : Leica AT 504 GG Choke Ring Antenna
Receiver : Javad Delta (Board : TRE-G3T) PC Server : IBM System x3100
- Processor : Intel Pentium Dual CPU E2200 @2.20 Ghz - Memory : DDR2 512 MB
- Harddisk : 160 GB SATA
Sistem Operasi : Windows XP Service Pack 2
Software Manajemen : GNSS Spider versi 3.2.0, Build 3217
UPS : APC
Saat ini GMU1 secara kontinyu menyediakan layanan data RINEX dalam beberapa sampling rate dan streaming NTRIP untuk aplikasi RTK dan DGPS. CORS GMU1 memproduksi data RINEX dalam beberapa sampling rate yaitu 1 detik, 5 detik dan 30 detik. Data RINEX yang diproduksi oleh CORS GMU1 adalah RINEX versi 2.1. CORS GMU1 secara aktif memancarkan sinyal koreksi RTCM melaui internet atau yang sering disebut dengan NTRIP. Saat ini layanan streaming NTRIP yang dapat diberikan CORS GMU1 adalah sinyal koreksi berformat RTCM (1.x, 2.x, 3.x), CMR, dan CMR+.
I.8.11. Receiver Leica Viva GS08
Receiver Leica Viva GS08 merupakan salah satu receiver GNSS dari Leica
Geosystem. Dengan dual frequency dan mampu manangkap 72 channel (termasuk sinyal GPS L1, L2, L2C dan GLONASS L1, L2) serta mampu menangkap 12 satelit (8 GPS + 4 GLONASS). Terdapat Bluetooth, usb port, internal GSM (SIM card) yang dapat mempermudah dalam pengukuran RTK NTRIP. Receiver Leica Viva GS08 diharapkan dapat digunakan untuk pengamatan RTK NTRIP dengan jangkauan yang jauh.
1.9. Hipotesis
Pengukuran RTK NTRIP yang dilakukan oleh Mahyeda (2010) dengan menggunakan receiver Topcon GR3 memperoleh ketelitian horisontal sebesar 0,010 m pada jarak kurang lebih 12 km dengan koreksi NTRIP dalam kondisi fix. Sedangkan pada pengukuran yang dilakukan oleh Putra (2011) menggunakan
receiver Javad Triumph 1, pada jarak kurang lebih 14 km dan 15 km didapatkan
ketelitian horisontal sebesar 0,013 m dan 0,026 m dengan koreksi NTRIP dalam kondisi fix, kemudian untuk jarak kurang lebih 16 km, 46 km dan 54 km didapatkan ketelitian horisontal sebesar 0,026 m; 0,071 m dan 0,059 m dengan koreksi NTRIP dalam kondisi float. Dengan menggunakan receiver Leica Viva GS08, cakupan koreksi streaming NTRIP dan ketelitian yang diperoleh pada jangkauan kurang lebih 10 km, 15 km dan 20 km diperkirakan sama dengan penelitian sebelumnya yang dilakukan oleh Mahyeda dan Putra.