SKRIPSI
Diajukan Oleh :
AGUS HARIYANTO NPM : 0634 015 027
JURUSAN TEKNIK INFORMATIKA FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL ″VETERAN″
SKRIPSI
Diajukan Untuk Memenuhi Sebagai Persyaratan
Dalam Memperoleh Gelar Sarjana Komputer
Jurusan Teknik Informatika
Disusun oleh :
AGUS HARIYANTO
NPM. 0634 015 027
JURUSAN TEKNIK INFORMATIKA FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS PEMBANGUNAN NASIONAL ″VETERAN″
JAWA TIMUR SURABAYA
PENGGUNAAN TEKNOLOGI WIRELESS
SEBAGAI MEDIA REMOTE ROBOTIC
Disusun Oleh :
AGUS HARIYANTO NPM. 0634 015 027
Telah disetujui untuk mengikuti Ujian Negara Lisan Gelombang II Tahun Akademik 2009/2010
Pembimbing Utama Pembimbing Pendamping
Basuki Rahmat, S.Si., MT Budi Nugroho, S.Kom NPT. 36907 060 209 NPT. 38 009 050 205
Mengetahui,
Ketua Jurusan Teknik Informatika Fakultas Teknologi Industri UPN ”Veteran” Jawa Timur
PENGGUNAAN TEKNOLOGI
WIRELESS
SEBAGAI MEDIA
REMOTE ROBOTIC
Penyusun : Agus Hariyanto
Pembimbing I : Basuki Rachmat,S.Si , MT Pembimbing II : Budi Nugroho, S.Kom
ABSTRAK
Robot merupakan hasil penggabungan antara perangkat keras dan perangkat lunak yang menyerupai bentuk benda tertentu dan dapat bergerak dengan sendirinya sesuai dengan program yang menggerakkannya.
Agar robot dapat bergerak sesuai dengan yang diinginkan, diperlukan perancangan khusus juga peralatan khusus yang mendukungnya, seperti peralatan mekanik dan elektrik.
Salah satu bentuk kombinasi antara peralatan mekanik dan elektrik juga perangkat lunak adalah mobil dengan koneksi wifi dan Mikrokontroller PIC16F628A. Dengan merancang program yang dimasukkan ke dalam mikrokontroler PIC16F628A, maka robot dapat berjalan dan bergerak sesuai dengan keinginan user.
Dari perancangan yang dilakukan, maka dihasilkanlah sebuah robot yang dapat berjalan sesuai dengan keinginan user yang mengendalikannya menggunakan remote (laptop) dengan media koneksi wifi.
KATA PENGANTAR
Bimillahirrahmanirrahiim
Alhamdulillahi Robil’Alamien
Dengan memanjatkan puji dan syukur kehadirat Allah SWT, atas berkat dan rahmat-Nya yang telah dilimpahkan kepada penyusun sehingga terbentuklah suatu Tugas Akhir yang berjudul “Penggunaan Teknologi Wireless Sebagai Media Remote Robotic”, untuk memenuhi salah satu syarat Ujian Akhir Sarjana di Fakultas Teknologi Industri dan Teknik Informatika Jurusan Sistem Informasi Universitas Pembangunan Nasional “Veteran” Jatim.
Tugas Akhir ini dapat penulis selesaikan berkat kerja sama dari berbagai pihak, baik moril maupun materil. Oleh karena itu, penulis ingin menyampaikan rasa hormat dan terima kasih yang sebesar–besarnya kepada :
1. Kedua orang tua dan keluarga penulis yang telah memberikan dukungan moril maupun materil selama ini.
2. Ir. Sutiyono, MT. selaku dekan Fakultas Teknologi Indutri Universitas Pembangunan Nasional “Veteran” Jatim.
3. Basuki Rahmat, S.Si., MT. selaku Ketua Jurusan Teknik Informatika Universitas Pembangunan Nasional “Veteran” Jatim dan Dosen Pembimbing I, yang telah meluangkan waktu untuk memberikan arahan dan memberi motivasi sehingga penyusun dapat menyelesaikan Tugas Akhir ini.
4. Budi Nugroho, S.kom selaku pembimbing 2.
6. Teman-teman penulis yang tidak mungkin penulis sebutkan namanya satu per
satu terima kasih telah membantu dan memberikan do’anya kepada penulis
untuk menyelesaikan skripsi ini.
7. Rekan-rekan di Teknik Informatika UPN “Veteran” Jatim angkatan 2006 terutama kelas sore, juga teman- teman penyusun dari semua angkatan yang secara tidak langsung telah membantu selama penyusunan tugas akhir ini. 8. Dan semua pihak yang telah banyak membantu yang tidak bisa disebutkan
satu-persatu.
Semoga kebaikan yang telah diberikan kepada penulis mendapatkan pahala yang melimpah dari Allah SWT.
Penulis menyadari bahwasanya dalam penyusunan Tugas Akhir ini masih memiliki banyak kekurangan baik dari segi materi maupun dari segi penyusunannya mengingat terbatasnya pengetahuan dan kemampuan penulis. Untuk itu, dengan kerendahan hati penyusun mohon maaf dan penyusun sangat mengharapkan segala saran dan kritikan yang sekiranya dapat membantu penyusun agar dalam penyusunan selanjutnya bisa lebih baik lagi.
Surabaya, 16 Desember 2010
BAB IV IMPLEMENTASI ... 36
4.1 Lingkungan Implementasi ... 36
4.2 Instalasi Openwrt-wrt54g-squashfs.bin ... 37
DAFTAR GAMBAR
Gambar 4.1 Remote Linksys WRT54GL Via Web Browser ... 37
Gambar 4.2 Firmware Upgrade ... 38
Gambar 4.11 Rangkaian PIC16F628A (konektor).……… 44
Gambar 4.12 Tes Rangkaian PIC16F628A …………..………. 44
Gambar 4.15 OpenWRT……….. ..……… 46
Gambar 4.16 Masuk direktori /tmp ...……… 46
Gambar 4.17 Download Aplikasi carserver_1_mipsel.ipk ……… 46
Gambar 4.18 Install aplikasi carserver_1_mipsel.ipk ……… 47
Gambar 4.19 Update ……….……….. ..……… 47
Gambar 4.20 Install Setserial ……….. ..……… 47
Gambar 4.21 Masuk direktori /usr/sbin .……… 48
Gambar 4.22 Download stty.tgz …….. ..……… 48
Gambar 4.23 Extract stty.tgz ……….. ..……...………..……… 48
Gambar 4.24 Chmod stty …..……….. ..……… 48
Gambar 4.25 Login Web ……….. ..………...……… 49
Gambar 4.26 Startup ………..……… 49
Gambar 4.27 Rangkaian Klakson ……..……… 50
Gambar 4.28 Rangkaian RX2 …...….. ..……… 50
Gambar 4.29 Koneksi Router ……….. ..……… 51
Gambar 4.30 Program Controller …..……….… 52
Gambar 4.31 Wifi Robot Controller …..……… 52
Gambar 5.7 Tombol Belok Kiri ……….………... 57
Gambar 5.8 Tombol Klakson ………...………. 57
Gambar 5.9 Robot Wifi ……….……… 58
Gambar 5.10 Hardware Belum Terkoneksi ………..……… 58
BAB I
PENDAHULUAN
1.1Latar Belakang
Seiring perkembangan teknologi yang semakin maju, teknologi robot
merupakan alat yang dapat digunakan sebagai alat bantu manusia yang memiliki
beberapa kelebihan. Kelebihan tersebut salah satunya adalah dapat digunakan
pada tempat-tempat yang tidak memungkinkan atau berbahaya bagi manusia.
Sebuah laboratorium riset kimia adalah contoh tempat yang kadang tidak
memungkinkan manusia berada di tempat itu karena bahaya gas beracun atau
radioaktif. Contoh lainnya yaitu pada industri pembuatan disk yang perlu
beroperasi pada ruangan steril dan industri perakitan elektronik. Oleh karena itu
dalam pelaksanaan kerjanya, diperlukan adanya batasan jarak antara manusia itu
sendiri terhadap obyek yang akan dikerjakan.
Karena faktor-faktor inilah yang mendorong penulis untuk merancang
tugas akhir dengan judul Penggunaan Teknologi Wireless Sebagai Media Remote
Robotic. Dengan media wireless sebuah alat (robot) dapat dikontrol oleh user
dengan jarak yang cukup jauh, sehingga memberikan keamanan bagi user tersebut
dalam bekerja.
Alat (robot) dapat berjalan dengan cara memberikan informasi data oleh
user melalui Personal Computer (PC) dengan menggunakan media Wireless
1.2 Perumusan Masalah
Berdasarkan uraian – uraian dari latar belakang permasalahan di atas,
maka perlu adanya pembahasan yang sistematis, permasalahan dapat dirumuskan
sebagai berikut :
1) Mengatur agar robot dapat berkomunikasi dengan wifi menggunakan port
serial.
2) Membuat program aplikasi dengan visual basic 6.0 agar robot tersebut
dapat bekerja sesuai dengan keinginan user.
3) Menganalisa cara kerja microcontroller dalam hal mengirim dan menerima
data dari robot ke mikrokontroler dan mikrokontroler ke wifi.
4) Menerapkan suatu cara agar mikrokontroler dapat mengatur komunikasi
melalui wifi untuk pengiriman data.
1.3 Tujuan Penelitian
Tujuan dari Penggunaan Teknologi Wireless Sebagai Media Remote
robotic adalah sebagai berikut :
1) Membuat program aplikasi yang bisa digunakan untuk mengendalikan
robot.
2) Melakukan koneksi antara wifi dan mikrokontroler menggunakan metode
komunikasi serial untuk mengendalikan robot.
3) Menganalisa waktu tunda (delay) dari koneksi TCP/IP pada pergerakan
1.4Manfaat Penelitian
Dengan adanya robot yang dikontrol menggunakan PC dan dikoneksikan
melalui media wifi ini maka pakerjaan seorang user akan teringankan, karena
dengan robot ini user dapat melakukan pekerjaan yang sangat beresiko apabila
dikerjakan oleh manusia seperti yang dijelaskan pada latar belakang diatas. Selain
itu robot ini juga dapat digunakan sebagai robot pengintai dengan penambahan
camera ip.
1.5Batasan Masalah
Dalam batasan masalah yang dihadapai diperlukan ruang lingkup
permasalahan terhadap sistem yang akan dibangun, hal ini bertujuan agar
pembahasan masalah tidak terlalu meluas. Maka ruang lingkup yang akan dibahas
adalah sebagai berikut :
1) Microcontroller yang digunakan adalah PIC16F628A
2) Koneksi antara mikro dan wifi menggunakan komunikasi serial DB9.
3) Pemrograman untuk client/ user menggunakan visual basic 6.0.
4) Komunikasi data hanya sebatas jaringan lokal menggunakan wifi.
5) Pada proyek akhir ini tidak menyinggung tentang network security,
karena alat ini tidak didesain untuk menahan dan menangkal serangan
dijaringan public atau internet.
6) Didalam robot tidak menggunakan camera ip dan sensor apapun
dikarenakan keterbatasan dana.
7) Pada proyek akhir ini tidak menyinggung tentang pembuatan program
8) Dalam satu remote (laptop) hanya dapat menjalankan sebuah robot.
1.6Metode penelitian
Metode yang dilaksanakan dalam penelitian ini adalah :
1) Study Literatur
Pada tahap ini dilakukan penelusuran terhadap berbagai macam
literatur seperti buku, referensi – referensi baik melalui perpustakaan
maupun internet dan lain sebagainya yang terkait dengan judul
penelitian ini dan berguna untuk pembelajaran bagi penulis.
2) Analisa Aplikasi
Dari hasil study literature akan dibuat deskripsi umum untuk
mengenai penggunaan teknologi wireless sebagai media remote
robotic.
3) Rancang – Bangun Aplikasi
Pada tahap ini dilakukan pembangunan hardware (robot, konektor
serial, dan WiFi dengan port serial) dan software.
4) Uji Coba dan Evaluasi Aplikasi
Pada tahap ini dilakukan uji coba terhadap sistem yang telah dibangun,
5) Dokumentasi
Pada tahap ini dilakukan pembuatan laporan mulai dari study literatur
sampai dengan implementasi dari penggunaan wireless sebagai media
remote robotic, serta penarikan kesimpulan dan saran.
1.7Sistematika Penulisan
Sistematika pembahasan Tugas akhir yang disusun ini akan dibahas
pada bab-bab yang akan diuraikan di bawah ini :
BAB I : PENDAHULUAN
Menguraikan tentang latarbelakang permasalahan mencoba
merumuskan inti permasalahan dan menentukan tujuan untuk
kegunaan penelitian yang kemudian diikuti dengan pembatasan
masalah, asumsi metodelogi penelitian serta sistematikan
penulisan.
BAB II : LANDASAN TEORI
Bab ini berisi semua dasar – dasar teori untuk digunakan
selanjutnya pada bagian pembahasan.
BAB III : ANALISIS DAN PERANCANGAN SISTEM
Dalam bab ini akan membahas analisa koneksifitas WiFi dengan
BAB IV : IMPLEMENTASI
Bab ini berisi hasil implementasi dari perancangan yang telah
dibuat sebelumnya.
BAB V : UJI COBA DAN EVALUASI
Membahas tentang pengujian dan hasil dari perancangan
penggunaan wireless sebagai media remote robotic .
BAB VI : PENUTUP
Bab ini berisi kesimpulan dan saran yang diperoleh dari
implementasi dan uji coba penggunaan wireless sebagai media
remote robotic .
DAFTAR PUSTAKA
Berisi tentang literatur sebagai teori pendukung pembahasan
BAB II
DASAR TEORI
Pada bab ini akan dijelaskan tentang proses dasar – dasar dalam
perancangan robot wifi.
2.1 Robot
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik
menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program
yang telah didefinisikan terlebih dulu (kecerdasan buatan). Robot biasanya
digunakan untuk tugas yang berat, berbahaya, pekerjaan yang berulang dan kotor.
Biasanya kebanyakan robot industri digunakan dalam bidang produksi.
Penggunaan robot lainnya termasuk untuk pembersihan limbah beracun,
penjelajahan bawah air dan luar angkasa, pertambangan, pekerjaan "cari dan
tolong" (search and rescue), dan untuk pencarian tambang. Belakangan ini robot
mulai memasuki pasaran konsumen di bidang hiburan, dan alat pembantu rumah
tangga, seperti penyedot debu, dan pemotong rumput. (http://id.wikipedia.org/)
2.1.1 Robot Mobil
Robot Mobil atau Mobile Robot adalah konstruksi robot yang ciri khasnya
adalah mempunyai aktuator berupa roda untuk menggerakkan keseluruhan badan
robot tersebut, sehingga robot tersebut dapat melakukan perpindahan posisi dari
Robot mobil ini sangat disukai bagi orang yang mulai mempelajari robot.
Hal ini karena membuat robot mobil tidak memerlukan kerja fisik yang berat.
Untuk dapat membuat sebuah robot mobil minimal diperlukan pengetahuan
tentang mikrokontroler dan sensor-sensor elektronik.
Dasar robot mobil dapat dengan mudah dibuat dengan menggunakan
plywood /triplek, akrilik sampai menggunakan logam ( aluminium ). Robot mobil
dapat dibuat sebagai pengikut garis ( Line Follower ) atau pengikut dinding ( Wall
Follower ) ataupun pengikut cahaya. (http://id.wikipedia.org/)
2.1.2 Robot Jaringan
Robot jaringan adalah pendekatan baru untuk melakukan kontrol robot
menggunakan jaringan internet dengan protokol TCP/IP. Perkembangan robot
jaringan dipicu oleh kemajuan jaringan dan internet yang pesat. Dengan koneksi
jaringan, proses kontrol dan monitoring, termasuk akuisisi data bila ada,
seluruhnya dilakukan melalui jaringan. Keuntungan lain, koneksi ini bisa
dilakukan secara nirkabel. (http://id.wikipedia.org/)
2.2 Komunikasi Data
Komunikasi data adalah proses pengiriman informasi diatara dua titik
menggunakan saluran trasmisi dan peralatan komputer dengan terminal atau
komputer dengan peralatan. Komunikasi data merupakan gabungan dari teknik
telekomunikasi dengan teknik pengolahan data. Adapun tujuan pengiriman data
1) Memungkinkan pengiriman data dalam jumlah besar efisien, tanpa
kesalahan dan ekonomis dari satu tempat ketempat lain.
2) Memungkinkan peggunaan sistem komputer dan peralatan
pendukung dari jarak jauh.
3) Memungkinkan pengguna komputer secara terpusat maupun secara
terbesar sehingga mendukung manajemen dalam hal kontrol, baik
desentralisasi ataupun sentralisasi.
Komunikasi data yang memungkinkan untuk pencarian dan setiap aktivitas
yang berkaitan dengan pertukaran data diantara dua perangkat yang terhubung
secara langsung yang memungkinkan adanya pertukaran data antar kedua pihak.
Yang terlihat pada gambar 2.1 menggambarkan proses komunikasi data.
Sumber Transmiter Sistem
Transmisi Receiver Tujuan
Sistem Sumber Sistem Tujuan
Gambar 2.1 Komunikasi Data
Pada gambar 2.1 terdapat elemen – elemen dalam komunikasi model data
tersebut :
1) Source (sumber) : Alat ini membangkitkan data sehingga dapat
2) Transmitter (pengirim) : Biasanya data yang dibangkitkan dari system
sumber tidak ditransmisikan secara langsung dalam bentuk aslinya.
Sebuah transmitter cukup memindah dan menandai informsi dengan cara
yang sama seperti sinyal – sinyal elektronik yang dapat ditransmisikan
melewati beberapa sistem berurutan.
3) Sistem Transmisi : berupa jalur transmisi tunggal (single transmission)
atau jaringan komplek (complex network) yang menghubungkan antara
sumber dengan tujuan.
4) Tujuan (destination) : menangkap data yang dihasilkan oleh receiver
(penerima) yang nantinya akan di akses.
2.2.1 Jaringan Komunikasi Data
Jaringan komunikasi dapat diartikan sebagai suatu sistem yang terbentuk
dari interkoneksi fasilitas-fasilitas yang dirancang untuk membawa trafik dari
beragam sumber telekomunikasi.
Suatu jaringan terdiri dari link dan node. Istilah node digunakan untuk
merepresentasikan sentral. Istilah link digunakan untuk merepresentasikan kabel,
peralatan transmisi. Suatu jaringan komunikasi merupakan sumber daya yang
dapat dipakai secara bersamaan (shared) oleh sejumlah end user untuk
berkomunikasi dengan user lain yang lokasinya berjauhan. Tidak semua user
menggunakan jaringan pada waktu yang bersamaan, oleh karena itu merupakan
bersama-sama. Penggunaan sumber daya secara bersamaan ini melahirkan konsep
sentral. Berikut beberapa tipe jaringan Komunikasi :
a. LAN(Local Area Network)
LAN digunakan untuk menghubungkan komputer yang berada di dalam
suatu yang kecil, misalnya di dalam suatu gedung perkantoran atau kampus. Jarak
antar computer antar computer yang dihubungkan bisa mencapai 5 sampai 10 km.
suatu LAN bisanya bekerja pada kecepatan mulai 10 Mbps sampai 100 Mbps.
LAN menjadi popular karena memungkinkan banyak pengguna untk memakai
sumber daya yang dapat digunakan itu misalnya suatu mainframe, file,printer, dan
sebagainya.
b. MAN (Metropolitan Area Network)
MAN merupakan suatu jaringan yang cakupannya meliputi suatu kota.
MAN menhubungkan LAN – LAN yang lokasinya berjauhan. Jangkauan MAN
mencapai 10 km sampai beberapa ratus km. suatu MAN biasanya berkerja pada
kecepatan 1,5 sampai 150 Mbps.
c. WAN (Wide Area Network)
WAN dirancang untuk menghubungkan komputer – komputer yang
terletak pada suatu cakupan geografis yang luas seperti hubungan dari suatu kota
ke kota yang lain didalam suatu Negara. Cakupan WAN bisa meliputi 100 km
sampai 2,4 Gbps. Dalam WAN, terdapat pemanfaatan trehadap jaringan yang
bersifat umum dan biaya untuk peralatan untuk transmisi sangat tinggi, dan dalam
sebuah pemanfaatan jaringan WAN dimiliki dan dioprasikan sebagai suatu
jaringan public. Jaringan terpusat adalah yang terdiri dari beberapa node
(workstation) yang terhubung dengan sebuah computer pusat atau sebuah server.
d. GAN (Global Area Network)
GAN (Global Area Network) atau bisa disebut juga jaringan antar wilayah
benua. GAN juga merupakan suatu jaringan yang menhubungkan Negara –
Negara diseluruh dunia. Kecapatan GAN bervariasi mulai dari 1,5 Mbps sampai
dengan 100 Gbps dan cakupan mencakupi ribuan kilometer.
2.2.2 Internet
Internetadalah jaringan komputer yang saling terhubung secara global
yang memungkinkan pengguna internet saling bertukar informasi atau data
melalui jaringan tersebut. Internet adalah sistem komunikasi data berskala global,
suatu infrastruktur yang terdiri dari hardware dan software yang menghubungkan
komputer yang berada di jaringannya. Secara sederhana, Internet adalah
kumpulan dari beberapa komputer yang terkoneksi ke seluruh dunia, antara yang
satu dengan yang lain. Media koneksi yang digunakan bisa melalui sambungan
telepon, serat optik (fiber optic), kabel koaksial (coaxial cable), satelit atau
2.2.3 Struktur Kerja Internet
International network atau internet terdiri dari ratusan ribu jaringan lebih
kecil yang menghubungkan organisasi pendidikan, komersial, nirlaba, militer dan
bahkan perorangan. Susunan seperti ini dinamakan jaringan server - klien.
Komputer klien adalah komputer yang meminta data atau layanan. Server atau
host komputer adalah komputer pusat penyedia data atau layanan yang diminta.
Misalnya ketika komputer klien meminta informasi beragam penerbangan dan
harga tiket ke komputer server, maka komputer server mengirim informasi
tersebut kembali ke komputer klien. Jaringan komputer adalah sebuah himpunan
interkoneksi antara dua komputer atau lebih yang terhubung dengan transmisi
kabel atau tanpa kabel (wirelless).
2.2.4 Jaringan Komputer
Perkembangan teknologi saat ini mempertemukan jaringan lokal (LAN)
dengan teknologi komunikasi yang mendukung akses suatu tempat yang terpisah
jauh sekalipun untuk mengurangi biaya infrastruktur dalam jaringan komputer.
Pengguna dapat mengakses sumber data corporate site dalam lingkup intranet
dengan melakukan dial-in dari customer site. Pada saat yang sama, juga dicari
solusi jaringan wide-area antara kantor utama dengan kantor cabang, seperti yang
2.2.5 Konsep Dasar TCP/IP
Agar komputer-komputer dalam suatu jaringan dapat berkomunikasi,
maka dibutuhkan suatu protocol atau suatu aturan standar komunikasi baik antar
komputer maupun antara jaringan komputer lain sebagai berikut:
a. IP (internet protokol)
Pada dasarnya, komunikasi data merupakan proses megirimkan data dari
computer ke computer lain. Gambaran yang umum tentang TCP/IP adalah
gabungan dari dua protokol komunikasi yang diapakai untuk komunikasi data,
TCP kepanjangan dari transmissioncontrol-protocol dan IP kepanjangan dari
Internet Protocol. Kedua protokol tersebut dipakai untuk menyatakan sekelompok
protokol yang memiliki kaitan dengan protokol TCP dan IP seperti User
Datagram Protocol (UDP), File Transfer Protocol (FTP), Terminal Emulation
Protocol (TELNET).
Internet Protocol (IP) adalah mekanisme transmisi yang digunakn oleh
TCP/IP yang sifatnya unreliable dan connectionless. Banyak yang
mengistilahkan dengan best effort delivery, artinya bahwa IP menyediakan no
error checking atau tracking. Jika diperlukan reliabilitas maka IP mesti
dipasangkan dengan protokol yang reliable misalya TCP.
b. TCP (Transmission Control Protokol)
TCP merupakan protokol CO virtual-circuit yang setara dengan layer
transport. Pengiriman data dilakukan byte demi byte secara asinkron dan stream
berukuran tidak tetap, tidak fixed-size. Dalam pesan tersebut terdapat identifikasi
unik pelayanan host berupa nomor (socket). Penerima juga akan memberikan
nomor soket yang unik untuk dikembalikan kepada penerima. Diperoleh (srchost,
srcport, dsthost, dstport) yang unik untuk sebuah komunikasi pada layer TCP.
Agar paket yang diterimah dapat sampai ke layanan yang benar, maka untuk tiap
– tiap layanan di TCP/IP disediakan nomor identifikasi.
Berbeda dengan InterNet Protokol (IP), TCP mempunyai prinsip kerja
seperti "virtual circuit" pada jaringan telepon. TCP lebih mementingkan tata-cara
dan keandalan dalam pengiriman data antara dua komputer dalam jaringan. TCP
tidak perduli dengan apa-apa yang dikerjakan oleh IP, yang penting adalah
hubungan komunikasi antara dua komputer berjalan dengan baik. Dalam hal ini,
TCP mengatur bagaimana cara membuka hubungan komunikasi, jenis aplikasi apa
yang akan dilakukan dalam komunikasi tersebut (misalnya mengirim e-mail,
transfer file dan sebagainya.) Di samping itu, juga mendeteksi dan mengoreksi
jika ada kesalahan data. TCP mengatur seluruh proses koneksi antara satu
komputer dengan komputer yang lain dalam sebuah jaringan komputer.
(http://www.ittelkom.ac.id/)
2.3Router Linksys WRT54GL dan OpenWRT
2.3.1 Router Linksys WRT54GL
Router adalah perangkat jaringan yang digunakan untuk membagi protocol
kepada anggota jaringan yang lainnya, dengan adanya router maka sebuah
adalah jika kita ingin membagi IP Adress kepada anggota jaringan maka kita
dapat menggunakanrouter ini, ciri-ciri router adalah adanya fasilitas DHCP
(Dynamic Host Configuration Procotol), dengan mensetting DHCP, maka kita
dapat membagi IP Address, fasilitas lain dariRouter adalah adanya NAT (Network
Address Translator) yang dapat memungkinkan suatu IP Address atau koneksi
internet disharing ke IP Address lain.
misalnya jika pada suatu perangkat jaringan (komputer) memiliki IP
Adress 192.168.0.1, maka agar komputer lain dapat berkomunikasi, harus
diberikan IP Address dengan Network Identification 192.168.0 dan dengan Host
Identification 2-254, contoh 192.168.0.10, 192.168.0.11 dan seterusnya.
Permasalahan akan muncul ketika perangkat jaringan yang terhubung
sangat banyak (biasanya di atas 20 perangkat), seorang administrator akan dipaksa
berkeliling untuk mensetting IP Address tiap host, Oleh karenanya kita dapat
menggunakanRouter.
Jenis-jenis Router
Router Aplikasi
Router Hardware
Router PC
Router aplikasi adalah aplikasi yang dapat kita instal pada sistem operasi,
sehingga sistem operasi tersebut akan memiliki kemampuan sepertirouter, contoh
aplikasi ini adalah Winroute, WinGate, SpyGate, WinProxy dan lain-lain.
Router Hardware adalah merupakan hardware yang memiliki kemampuan
membagi IP Address dan men-sharing IP Address, pada prakteknya Router
hardware ini digunakan untuk membagi koneksi internet pada suatu ruang atau
wilayah, contoh dari router ini adalah access point, wilayah yang dapat mendapat
Ip Address dan koneksi internet disebut Hot Spot Area seperti pada gambar 2.2.
Router PC adalah Sistem Operasi yang memiliki fasilitas untuk membagi
dan mensharing IP Address, jadi jika suatu perangkat jaringan (pc) yang
terhubung ke komputer tersebut akan dapat menikmati IP Address atau koneksi
internet yang disebarkan oleh Sistem Operasi tersebut, contoh sistem operasi yang
dapat digunakan adalah semua sistem operasi berbasis clientserver, semisal
Windows NT, Windows NT 4.0, Windows 2000 server, Windows 2003 Server,
MikroTik (Berbasis Linux), dan lain-lain. (http://www.g-excess.com/)
2.3.2 OpenWRT
OpenWrt adalah sebuah proyek open source untuk menciptakan sebuah
sistem operasi gratis (sebenarnya lebih tepat disebut Firmware) yang bisa di
install (lebih tepatnya ditanam/di-embedded) pada perangkat radio wireless.
Karena dibuat dengan menggunakan kernel Linux maka Openwrt bisa disebut
sebagai salah satu distro Linux untuk perangkat embedded (embedded devices).
Pada awalnya, dukungan Openwrt hanya terbatas pada seri Linksys
WRT54GL, namun sekarang sudah mendukung berbagai chipset, produsen dan
perangkat wireless lainnya seperti D-Link, EnGenius(Senao), 3Com, Motorola,
Mikrotik dan masih banyak lagi, silahkan lihat di situs Openwrt, pada bagian
dukungan hardware.
Saat ini, router yang paling populer menggunakan Openwrt adalah seri
Linksys WRT54G dan Asus WL-500g. Untuk melakukan konfigurasi OpenWrt,
bisa dilakukan melalui tampilan grafis (GUI) yang bisa diakses melalui browser
dan juga melalui text mode (CLI) dengan remote ssh. (http://wiki.openwrt.org/)
2.4Mikrokontroler
Mikrokontroler adalah suatu alat elektronika digital yang mempunyai
masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus
dengan cara khusus. Sederhananya, cara kerja mikrokontroler sebenarnya hanya
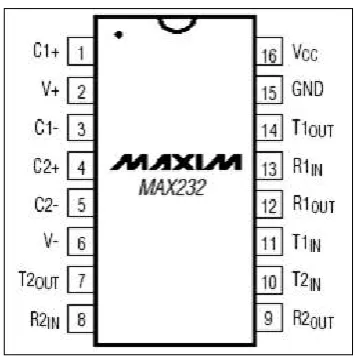
2.4.1 MAX232
MAX232 merupakan salah satu jenis IC rangkaian antar muka dual
RS-232 transmitter / receiver yang memenuhi semua spesifikasi standar EIA-232-E
seperti pada gambar 2.3. IC MAX232 hanya membutuhkan power supply 5V (
single power supply ) sebagai catu. IC MAX232 di sini berfungsi untuk merubah
level tegangan pada COM1 menjadi level tegangan TTL / CMOS. IC MAX232
terdiri atas tiga bagian yaitu dual charge-pump voltage converter, driver RS232,
dan receiver RS232.
Gambar 2.3 Konfigurasi Pin IC MAX232
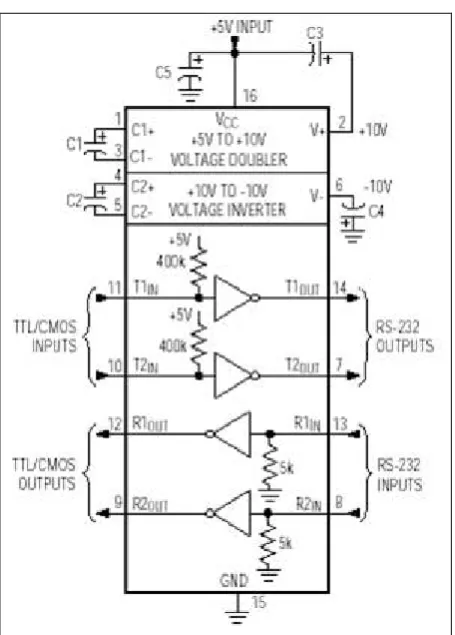
Dual Charge-Pump Voltage Converter.
IC MAX232 memiliki dua charge-pump internal yang berfungsi untuk
menkonversi tegangan +5V menjadi ±10V ( tanpa beban ) untuk operasi driver
tegangan input +5V menjadi +10V saat C3 berada pada output V+. Konverter
kedua menggunakan kapasitor C2 untuk merubah +10V menjadi -10V saat C4
berada pada output V-.
Driver RS232
Output ayunan tegangan ( voltage swing ) driver typical adalah ±8V. Nilai
ini terjadi saat driver dibebani dengan beban nominal receiver RS232 sebesar 5kΩ
atau Vcc = 5V. Input pada driver yang tidak digunakan bisa dibiarkan tidak
terhubung kemana – mana. Hal ini dapat terjadi karena dalam kaki input driver IC
MAX232 terdapat resistor pull-up sebesar 400kΩ yang terhubung keVcc.
Resistor pull-up mengakibatkan output driver yang tidak terpakai menjadi low
karena semua output driver diinversikan.
Receiver RS232
EIA mendefinisikan level tegangan lebih dari 3V sebagai logic 0,
berdasarkan hal tersebut semua receiver diinversikan. Input receiver dapat
menahan tegangan input sampai dengan ±25V dan menyiapkan resistor terminasi
input dengan nilai nominal 5k. Nilai input receiver hysteresis typical adalah 0,5V
Gambar 2.4 Typical Operasi Rangkaian
Gambar 2.4 merupakan typical operasi rangkaian IC MAX232. Nilai C1,
C2, C3, C4, dan C5 yang dianjurkan sebesar 1µF.
2.4.2 PIC16F628A
PIC16F628 adalah mikrokontroler yang diproduksi oleh Microchip
Teknologi ( www.microchip.com ), dengan karakteristik sebagai berikut:
- Terdiri dari 18 pin;
- Jam sinyal frekuensi sampai 20 MHz;
- Program Memory Type Flash 2048 kata (1 word = 32 bit);
- 224 byte RAM untuk data;
- 128 byte memori data EEPROM;
- 14-bit instruksi dengan 200ns runtime;
- 8 bit data per alamat memori;
- 15 register khusus;
- 16 pin yang dapat dikonfigurasi sebagai input atau output;
- Fitur-fitur khusus lain seperti rangkaian seri pemrograman-in, pass
perlindungan kode, pengawas timer (timer pengawas), PKC modul,
komparator internal, USART ,... (http://www.oz1bxm.dk/)
2.5Assembly
Bahasa rakitan (bahasa Inggris: assembly language) adalah bahasa
pemrograman komputer tingkat rendah. Bahasa rakitan merupakan notasi untuk
bahasa mesin yang dapat dibaca oleh manusia dan berbeda-beda tergantung dari
arsitektur komputer yang digunakan. Bahasa mesin adalah pola bit-bit
(serangkaian nomor-nomor biner) tertentu yang merupakan kode operasi mesin.
Bahasa mesin dibuat lebih mudah dibaca dan ditulis dengan cara mengganti pola
bit-bit menjadi julukan-julukan yang disebut mnemonics.
Berbeda dengan bahasa pemrograman tingkat tinggi, bahasa rakitan
biasanya memiliki hubungan 1-1 dengan instruksi bahasa mesin. Misalnya, tiap
oleh komputer. Pada bahasa tingkat tinggi, satu perintah dapat diterjemahkan
menjadi beberapa kode operasi dalam bahasa mesin. Proses pengubahan bahasa
rakitan ke bahasa mesin dilakukan oleh assembler, dan proses balikannya
dilakukan oleh disassembler.
Setiap arsitektur komputer memiliki bahasa mesin yang berbeda-beda
sehingga bahasa rakitannya pun berbeda-beda.
Berikut merupakan contoh bahasa rakitan:
mov al, 0x61
yang berarti pindahkan (mov = move) nilai heksadesimal 61 (= 97 dalam desimal)
ke register prosesor bernama "al". Adalah lebih mudah mengingat ini dari bahasa
mesin:
10110000 01100001
(http://www.mikron123.com/)
2.6Visual Basic 6.0
Sebuah program aplikasi yang dibuat harus dapat melakukan proses
pengolahan data akuntansi dan memiliki tampilan yang komunikatif dan menarik
bagi pemakai. Salah satu alat untuk membuat program aplikasi adalah Microsoft
Visual Basic 6.0.
Microsoft Visual Basic 6.0 (VB6) adalah bahasa program yang bekerja
dalam lingkup MS-Windows (M. Agus J. Alam, 2001:1). Microsoft Visual Basic
berasal dari bahasa pemrograman yang populer yang disebut Basic (Beginner’s
diperkenalkan pertama kali oleh Dartmouth College pada tahun 1960. Kemudian
beberapa pengembang software mempopulerkan bahasa Basic dengan membuat
berbagai macam aplikasi seperti GW-Basic, Qbasic dan Quick Basic. Visual Basic
berbasis DOS untuk Windows diperkenalkan pada tahun 1991.
Visual Basic 6.0 memiliki kelebihan-kelebihan yang tidak dimiliki oleh versi
sebelumnya. Kelebihannya antara lain kompiler (proses compile) dapat dilakukan
dengan cepat, mendukung kontrol data objek yang baru, mendukung berbagai
macam database, pembuatan laporan yang lebih mudah dan mendukung
pengaksesan terhadap internet.
Dalam pengembangan aplikasi, VB menggunakan pendekatan Visual
(GUI-Graphical User Interface) untuk merancang antarmuka (interface).
Microsoft Visual Basic 6.0 memiliki banyak keunggulan diantaranya basis bahasa
pemrograman menggunakan BASIC (Beginners All-Purpose Symbolic Instruction
Code) serta mampu memanfaatkan kemampuan Microsoft Windows secara
optimal. Selain itu Microsoft Visual Basic 6.0 juga telah mengalami
penyempurnaan dari versi sebelumnya yaitu penambahan fasilitas IDE (Integrated
Development Environment) dan koleksi kontrol yang lebih lengkap.
Visual Basic 6.0 dapat menghasilkan tipe data yang dapat disesuaikan
sendiri. Tipe data tersebut dapat berupa argumen dan properti. Dengan adanya
fasilitas Native Code untuk mengkompilasikan source code, maka akan
menghasilkan suatu aplikasi dengan waktu eksekusi lebih cepat.
Visual Basic 6.0 menyediakan tiga macam interface yang bisa digunakan
MDI (Multi Document nterface), SDI (Single Document Interface) dan EDI
(Exploler Document Interface). Modifikasi pada masing-masing bagian akan
terasa lebih mudah. Fasilitas yang disediakan juga lebih lengkap sehingga bisa
memenuhi selera programmer yang pada akhirnya akan meningkatkan
produktivitas kerja.
Fasilitas-fasilitas dalam Microsoft Visual Basic 6.0:
1) Menu
Menu merupakan daftar perintah-perintah yang dikelompokkan dalam kriteria
tertentu yang berfungsi untuk melaksanakan sebuah perintah. Visual Basic 6
terdapat tiga belas menu utama yaitu File, Edit, View, Project, Format, Debug,
Run, Query, Diagram, Tools, Add-In, Windows dan Help.
2) Toolbar
Toolbar merupakan kumpulan tombol yang dapat melakukan sebuah perintah
dengan cepat. Fungsi toolbar hampir sama dengan menu hanya toolbar
berbentuk tombol-tombol yang susunannya tidak secara bertingkat. Contoh
toolbar tersebut antara lain Add Form, Menu Editor, Save, Cut, Copy dan lain
sebagainya.
3) Form
Form adalah tempat untuk meletakkan objek-objek yang digunakan untuk
tombol Minimize, Maximize/Restore dan Close yang digunakan untuk
mengatur tampilan jendela form.
4) Window Code
Window Code adalah jendela tempat menuliskan kode program. Semua kode
perintah ditulis pada jendela ini. Pada bagian Window Code terdapat fasilitas
kode editing yang cukup lengkap
5) Toolbox
Toolbox adalah kumpulan objek yang digunakan untuk kontrol pada sebuah
program. Toolbox terdiri atas beberapa tool yang kemudian ditempatkan pada
sebuah form. Toolbox terdiri dari Pointer, Label, Image, Frame, Winsock dan
lain sebagainya.
6) Project Explorer
Project Explorer digunakan untuk melihat bagian-bagian proyek pembuatan
aplikasi. Bagian-bagian tersebut dapat berupa project, form, data environment
dan data report. Project Explorer ini berbentuk menu tree sehingga
mempermudah dalam pengaksesannya. Pada jendela explorer terdapat tiga
tombol kontrol tampilan antara lain Window Code untuk menampilkan kode,
Window Project untuk menampilkan dalam bentuk visual dan Toggle Folder
7) Windows Properties
Window Properties menampilkan semua properti dari obyek yang digunakan.
Kita dapat mengubah setiap properti dari objek yang ada melalui jendela ini.
8) Windows Form Layout
Windows Form Layout digunakan untuk mengatur letak form pada layar
monitor. (http://lavorchid.wordpress.com/)
2.7Komponen Elektronika
Komponen Elektronika biasanya sebuah alat berupa benda yang menjadi
bagian pendukung suatu rangkaian elektronik yang dapat bekerja sesuai dengan
kegunaannya. Mulai dari yang menempel langsung pada papan rangkaian baik
berupa PCB, Protoboard maupun Veroboard dengan cara disolder atau tidak
menempel langsung pada papan rangkaian (dengan alat penghubung lain,
misalnya kabel).
2.7.1 PCB
Papan sirkuit cetak (bahasa Inggris: printed circuit board atau PCB)
adalah sebuah papan yang penuh dengan sirkuit dari logam yang menghubungkan
komponen elektronik satu sama lain tanpa kabel.
Papan sirkuit ini mendapatkan namanya karena diproduksi secara massal
dengan cara pencetakan.
Papan sirkuit cetak dapat digolongkan atas beberapa jenis berdasarkan:
o lapis ganda
o multi lapis (4, 6, 8 lapis)
• bentuk
o keras
o lunak (fleksibel)
o gabungan keras dan lunak
• spesifikasi
o konvensional
o penghubung kepadatan tinggi (High Density Interconnect)
• material basis
o FR4
o logam o keramik
2.7.2 Resistor
Resistor adalah komponen dasar elektronika yang digunakan untuk
membatasi jumlah arus yang mengalir dalam suatu rangkaian. Kemampuan
resistor dalam menghambat arus listrik sangat beragam disesuaikan dengan nilai
resistansi resistor tersebut. Resistor bersifat resistif dan umumnya terbuat dari
bahan karbon. Satuan resistansi dari suatu resistor disebut Ohm atau
dilambangkan dengan simbol Ω (Omega).
2.7.3 Transistor
Transistor adalah alat semikonduktor yang dipakai sebagai penguat,
sebagai sirkuit pemutus dan penyambung (switching), stabilisasi tegangan,
modulasi sinyal atau sebagai fungsi lainnya. Transistor dapat berfungsi semacam
(FET), memungkinkan pengaliran listrik yang sangat akurat dari sirkuit sumber
listriknya.
Pada umumnya, transistor memiliki 3 terminal. Tegangan atau arus yang
dipasang di satu terminalnya mengatur arus yang lebih besar yang melalui 2
terminal lainnya. Transistor adalah komponen yang sangat penting dalam dunia
elektronik modern. Dalam rangkaian analog, transistor digunakan dalam amplifier
(penguat). Rangkaian analog melingkupi pengeras suara, sumber listrik stabil, dan
penguat sinyal radio. Dalam rangkaian-rangkaian digital, transistor digunakan
sebagai saklar berkecepatan tinggi.
2.7.4 Kapasitor
Kapasitor adalah komponen elektronika yang dapat menyimpan muatan
listrik. Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan
oleh suatu bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya
udara vakum, keramik, gelas dan lain-lain. Jika kedua ujung plat metal diberi
tegangan listrik, maka muatan-muatan positif akan mengumpul pada salah satu
kaki (elektroda) metalnya dan pada saat yang sama muatan-muatan negatif
terkumpul pada ujung metal yang satu lagi. Muatan positif tidak dapat mengalir
menuju ujung kutup negatif dan sebaliknya muatan negatif tidak bisa menuju ke
ujung kutup positif, karena terpisah oleh bahan dielektrik yang non-konduktif.
Muatan elektrik ini "tersimpan" selama tidak ada konduksi pada ujung-ujung
2.7.5 Regulator
Regulator adalah rangkaian regulasi atau pengatur tegangan keluaran dari
sebuah catu daya agar efek darinaik atau turunnya tegangan jala-jala tidak
mempengaruhi tegangan catu daya sehingga menjadi stabil.
Rangkaian penyearah sudah cukup bagus jika tegangan ripple -nya kecil,
tetapi ada masalah stabilitas. Jika tegangan PLN naik/turun, maka tegangan
outputnya juga akan naik/turun. Seperti rangkaian penyearah di atas, jika arus
semakin besar ternyata tegangan dc keluarannya juga ikut turun. Untuk beberapa
aplikasi perubahan tegangan ini cukup mengganggu, sehingga diperlukan
komponen aktif yang dapat meregulasi tegangan keluaran ini menjadi stabil.
• Perlunya Regulator
Ada beberapa alasan yang mungkin diperlukannya sebuah regulator....
1) Fluktuasi tegangan jala-jala
2) Perubahan tegangan akibat beban (loading)
ANALISIS DAN PERANCANGAN SISTEM
Pada bab ini akan dijelaskan mengenai proses penggunaan teknologi
wireless sebagai media remote robotic yang akan dibuat. Proses pembangunan
proyek dalam sub-bab ini akan dibagi menjadi beberapa tahap antara lain, analisis
permasalahan dan perancangan sistem.
3.1 Analisis Permasalahan
Proyek yang akan dibuat pada Tugas Akhir ini adalah sebuah proyek
untuk menjalankan (remote) sebuah hardware (mobil mainan) dengan
menggunakan media wireless sehingga dapat dijalankan secara nirkabel melalui
laptop/ PC.
Dengan memanfaatkan proyek ini diharapkan permainan mobil RC
(Remote Control) akan menjadi lebih menarik serta dapat menumbuhkan suatu
kreativitas baru pada penghobi/ pemain mobil RC.
3.2 Perancangan Sistem
Perancangan sistem berisikan penjelasan tentang deskripsi umum sistem,
dan kebutuhan sistem.
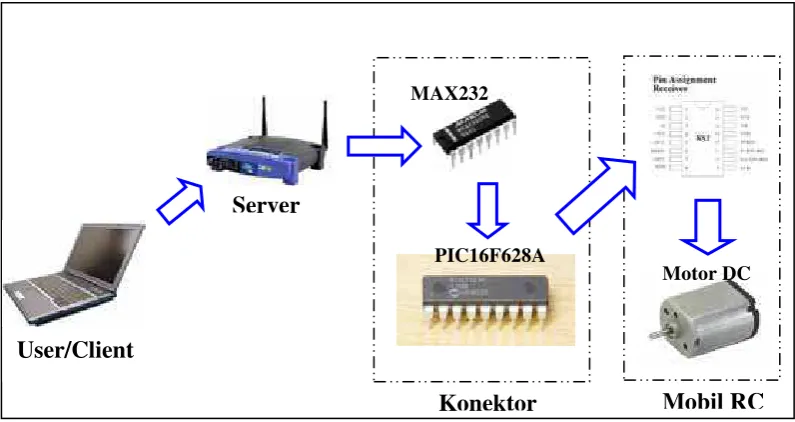
3.2.1 Deskripsi Umum Sistem
Berikut gambar deskripsi arsitektur sistem yang akan dibangun pada
Gambar 3.1 Deskripsi Arsitektur Sistem
Penjelasan dari gambar deskripsi arsitektur sistem pada gambar 3.1 adalah
sebagai berikut :
a. User/Client mengirimkan paket-paket data dengan sebuah aplikasi desktop
melalui jaringan wifi.
b. Data dari user/client diterima oleh server melalui wifi dan diteruskan ke
PIC16F628A melalui MAX232 untuk kemudian diproses.
c. Data yang sudah diproses kemudian diteruskan ke RX2 untuk menjalankan
motor DC.
3.2.2 Kebutuhan Sistem
Dengan mengidentifikasi deskripsi pada gambar 3.1 telah diketahui bahwa
kebutuhan sistem terbagi menjadi 2 yaitu kebutuhan perangkat keras dan
kebutuhan perangkat lunak.
Server
User/Client
Konektor Mobil RC
MAX232
PIC16F628A
Berdasarkan penjelasan sebelumnya bahwa proyek yang akan dirancang
adalah sebuah robot yang dapat bergerak/ berjalan dengan cara diremote
menggunakan laptop/ PC melalui media wifi. Dengan demikian, dalam
perancangan proyek ini di butuhkan beberapa perangkat keras antara lain yaitu:
a) Laptop/ PC yang mempunyai koneksi wifi.
b) Mobil RC yang menggunakan IC RX2/TX2 Realtek.
c) Router Linksys WRT54GL.
d) Mikrokontroler PIC16F628A.
e) Baterai.
f) Komponen elektronik (MAX232, konektor DB9, transistor, kapasitor, resistor,
PCB lubang, kabel, LED, dioda, regulator, dll).
g) Peralatan (downloader PIC, solder, timah, obeng, tang, kabel serial DB9,
kabel null modem, dll)
2) Kebutuhan Perangkat Lunak
Untuk memenuhi kebutuhan pengguna dalam berinteraksi dengan sistem
diperlukan perangkat lunak sebagai jembatan untuk menghubungkan antar
perangkat keras. Perangkat lunak yang akan digunakan dalam perancangan proyek
ini adalah :
a) Openwrt-wrt54g-squashfs.bin
b) Visual Basic 6.0.
c) Putty.
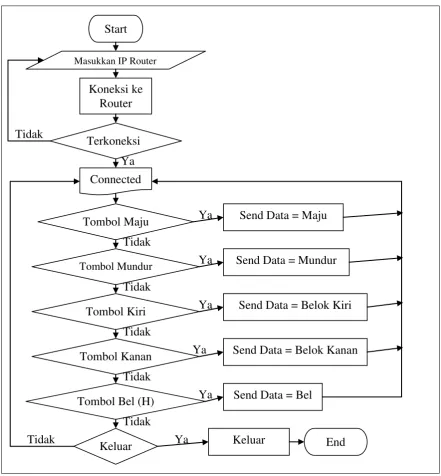
1) Alur Sistem Aplikasi (Flowchart)
Alur sistem pada aplikasi dapat digambarkan ke dalam diagram flowchart
yang menjelaskan tentang terjadinya alur sebuah sistem yang menangani pada
sebuah program dimana sistem tersebut adalah salah satu bentuk dari proses yang
terdapat dalam suatu aplikasi pada user seperti pada gambar 3.2.
Gambar 3.2 Flowchart Aplikasi
Masukkan IP Router
Send Data = Belok Kanan
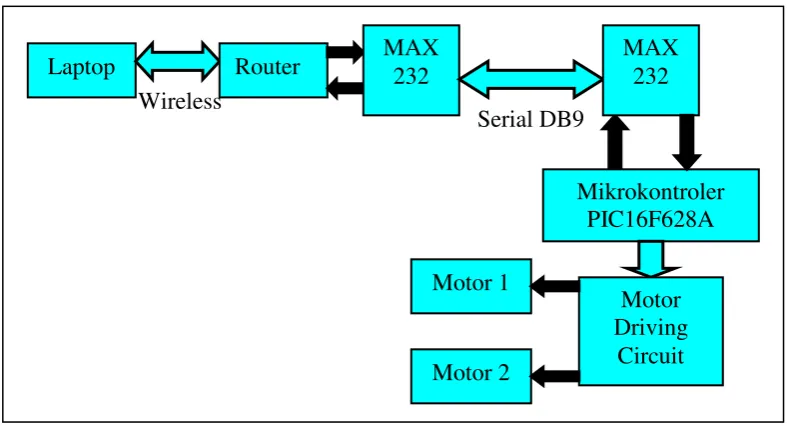
Alur sistem pada robot dapat digambarkan ke dalam block diagram yang
menjelaskan tentang terjadinya alur sebuah sistem yang menangani pada sebuah
robot dimana sistem tersebut adalah salah satu bentuk dari proses yang terdapat
dalam sebuah robot seperti pada gambar 3.3.
Gambar 3.3 Block Diagram Robot
Dari gambar 3.3 diatas maka dapat dijelaskan user (laptop) melakukan
konenksi dengan robot menggunakan media wireless. Didalam router dan
rangkaian pada mikrokontroler masing-masing terdapat komponen MAX 232,
sehingga antara router dengan mikrokontroler dapat melakukan komunikasi data
secara serial menggunakan konektor DB9.
Data dikirim oleh user (laptop) ke router menggunakan media wireless,
kemudian dari router data dikirim ke mikrokontroler PIC16F628A mengunakan
serial DB9dan dilanjutkan ke motor driving circuit untuk menggerakkan motor 1
IMPLEMENTASI SISTEM
4.1 Lingkungan Implementasi
Pada bagian ini akan dijelaskan mengenai perangkat keras dan perangkat
lunak yang digunakan pada implementasi sistem ini. Perangkat keras yang
digunakan adalah sebagai berikut :
a) Komputer atau laptop, untuk pengujian aplikasi ini spesifikasi yang
digunakan adalah Intel Core 2 Duo @1.50 GHz, memori 1.5 GB dan
harddisk 80 GB.
b) Mobil RC yang digunakan memakai IC RX2 Realtek.
c) Router Linksys WRT54GL (untuk server).
d) Mikrokontroler PIC16F628A.
e) Baterai dengan tegangan 16 volt.
f) Komponen elektronik
MAX232.
LED (merah dan hijau).
Sedangkan perangkat lunak yang digunakan dalam perancangan aplikasi
ini adalah sebagai berikut :
a) Openwrt-wrt54g-squashfs.bin
b) Visual Basic 6.0.
c) Putty-0.60.
d) Web browser Firefox 3.0.2.
4.2 Instalasi Openwrt-wrt54g-squashfs.bin
Installer Openwrt-wrt54g-squashfs.bin dapat didownload di
http://downloads.x-wrt.org/xwrt/firmware_images/whiterussian/0.9/milestone-3-rc2/default/openwrt-wrt54g-squashfs.bin secara gratis. Untuk menginstalnya yaitu
sebagai berikut:
1) Nyalakan terlebih dahulu router linksys wrt54gl.
2) Hubungkan dengan laptop menggunakan wifi atau kabel UTP.
3) Jalankan web browser yang ada di laptop.
4) Masukkan IP router pada web browser seperti pada gambar 4.1.
Gambar 4.2 Firmware Upgrade
6) Tekan tombol Browser untuk mencari file Openwrt-wrt54g-squashfs.bin
yang telah di download.
7) Kemudian takan tombol Upgrade untuk melakukan upgrade/ install
Openwrt-wrt54g-squashfs.bin.
8) Setelah selesai upgrade, masukkan password baru.
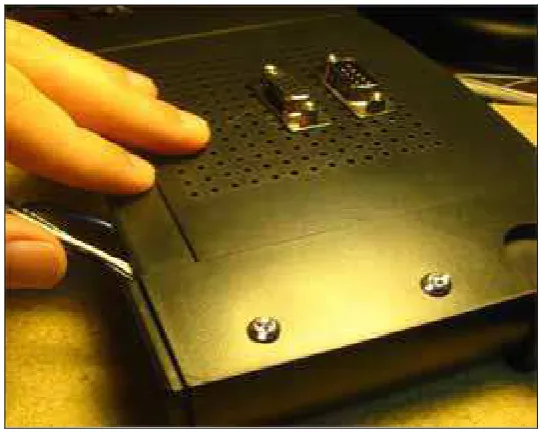
4.3 Instalasi Dual Port Serial
Dengan penambahan dual port serial maka wifi dapat melakukan
komunikasi data menggunakan port serial DB9. Adapun langkah-langkah untuk
instalasinya adalah sebagai berikut :
1) Lepaskan stiker 'garansi void’!
2) Lepaskan dua antena wifi.
bagian bawah plastik sehingga PCB router bebas.
Gambar 4.3 Rangkaian Dual Port
5) Rangkailah komponen elektronika seperti gambar 4.3.
6) Solder ke Header JP2 seperti gambar 4.4.
gambar 4.5.
Gambar 4.5 Konektor DB9
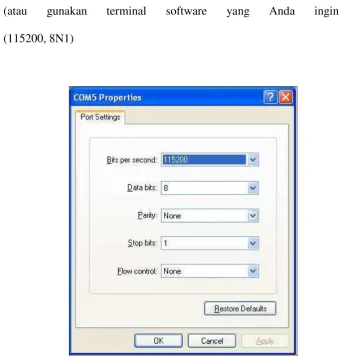
4.3.1 Pengujian
Untuk mengetahui keberhasilan pada instalasi dual port serial maka
diperlukan adanya sebuah pengujian dengan menggunakan kabel serial DB9 dan
kabel null madem seperti gambar 4.6.
1) Hubungkan kabel serial dari konsol konektor DB9 ke PC Anda.
2) Buka sambungan hypterminal menggunakan pengaturan seprti gambar 4.7
(atau gunakan terminal software yang Anda inginkan).
(115200, 8N1)
Gambar 4.7 Port Settings 115200
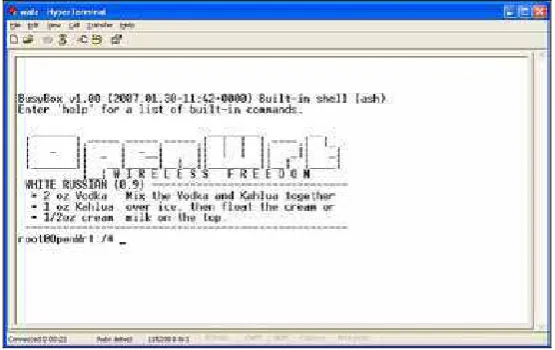
3) Reboot router.
4) Anda akan melihat sekelompok pesan kernel. Tekan enter pada terminal
Gambar 4.8 tty/0 (konsol)
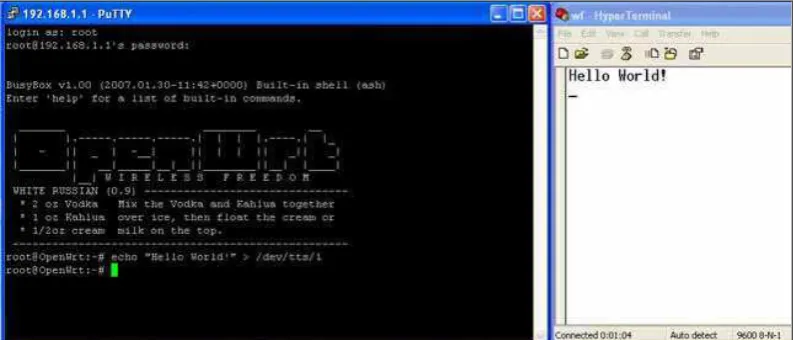
Untuk menguji TTS / 1:
1) Hubungkan kabel null modem antara TTS / 1 konektor DB9 dan PC Anda.
2) Buka sambungan hypterminal menggunakan pengaturan seprti gambar 4.9
(atau gunakan terminal software yang Anda inginkan).
(9600, 8N1)
tetapkan pada saat instalasi openwrt (Menggunakan putty).
4) Masukkan perintah:
# echo "Hello World!" > /dev/tts/1
5) Pastikan bahwa Anda melihat “Hello World!” Pada konsol serial anda (di
hyperterminal) seperti yang ditunjukkan pada gambar 4.10.
Gambar 4.10 TTS/1
4.4 Instalasi PIC16F628A
Dalam proyek Tugas Akhir kali ini mikrokontroler yang di pakai
adalah PIC16F628A dan berikut ini cara instalasinya.
1) Download file car_pic.HEX di http://www.jbprojects.net./projects/
wifirobot/car_pic.HEX
2) Masukkan file car_pic.HEX ke dalam PIC16F628A menggunakan
downloader PIC.
Gambar 4.11 Rangkaian PIC16F628A (konektor)
4) Hubungkan ke baterai dengan tegangan 5volt.
5) Pastikan LED merah menyalah seperti pada gambar 4.12.
Car Server adalah sebuah software aplikasi yang di install pada router
(openwrt) sebagai media transfer. Dan berikut ini cara instalasinya.
1) Bukalah putty.exe dan masukkan IP router seperti pada gambar 4.13.
Gambar 4.13 Putty.exe
2) Login dengan username : root dan password yang suda anda buat pada
waktu instalasi openwrt seperti pada gambar 4.14.
Gambar 4.15 OpenWRT
4) Ketik perintah : cd /tmp
Gambar 4.16 Masuk direktori /tmp
5) Download aplikasi carserver_1_mipsel.ipk seperti gambar 4.17.
Gambar 4.18 Install aplikasi carserver_1_mipsel.ipk
4.6 Instalasi Setserial
Pada dual port serial juga diperlukan aplikasi pendukung yaitu setserial.
Dan berikut ini cara instalasinya :
1) Update OpenWRT dengan cara seperti pada gambar 4.19.
Gambar 4.19 Update
2) Lakukan instalasi setserial seperti pada gambar 4.20.
Gambar 4.20 Install Setserial
Gambar 4.21 Masuk direktori /usr/sbin
4) Download stty.tgz
Gambar 4.22 Download stty.tgz
5) Extract stty.tgz
Gambar 4.23 Extract stty.tgz
6) Memberikan akses dengan perintah chmod 755 seperti pada gambar 4.24.
Gambar 4.24 Chmodstty
7) Kemudian masukkan IP router pada web browser dan login seperti pada
Gambar 4.25 Login Web
8) Masuk halaman System > Startup.
9) Kemudian masukkan baris teks berikut seperti gambar 4.26:
Gambar 4.26 Startup
4.7 Instalasi Klakson
Pada tahap ini akan ditambahkan sebuah aksesoris yang wajib ada pada
setiap mobil yaitu klakson. Dan cara instalasinya adalah sebagai berikut:
1) Rangkailah komponen elektronika seperti gambar 4.27. /usr/sbin/setserial /dev/tts/1 irq 3
Gambar 4.27 Rangkaian Klakson
2) Hubungkan pada PIC16F628A (PIN11).
4.8 Instalasi Mobil
Dalam proyek ini mobil RC yang digunakan memakai IC RX2 Realtek
sehingga dapat dihubungkan ke PIC16F628A seperti pada gambar 4.28 berikut.
Untuk pembagian power harus sangat diperhatikan karena dapat
mengakibatkan kesalah yang sangat falat yaitu terbakarnya suatu komponen
elektronika. Dengan demikian pembagian harus disesuaikan dengan kebutuhan
masing-masing komponen elektronika.
Tegangan 5volt 1A (7805 Regulator) = Mikrokontroler.
Tegangan 12volt 1A (7812 Regulator) = Router
Tegangan 9.6volt = Mobil RC
4.10 Wifi Robot Controller
Untuk melakukan koneksi dari Visual Basic 6.0 ke wireless diperlukan
sebuah tool Winsock yang ada pada Visual Basic 6.0 dengan penulisan baris
program seperti pada gambar 4.29.
Private Sub Command1_Click() If sock.State = sckClosed Then sock.RemoteHost = lbladdress.Text sock.RemotePort = "1500"
Label4.Caption = "Connected" Label4.BackColor = &HFF00& sock.Connect
Else
sock.Close
Label4.Caption = "Not Connected" Label4.BackColor = &HFF&
End If End Sub
Gambar 4.29 Koneksi Router
Sedangkan untuk Controller-nya menggunakan aplikasi yang dibuat dari
pemrograman Visua Basic 6.0 yang dijalankan pada laptop seperti pada gambar
If KeyCode = vbKeyT Then Call Command1_Click
If KeyCode = vbKeyUp Or KeyCode = vbKeyW Then cmd_up.BackColor = &HFF0000: cmd_up.Picture = cmd_up.DownPicture: upstatus = 1: Label5.Caption = "Sending Data": Label5.ForeColor = &HFF00&
If KeyCode = vbKeyDown Or KeyCode = vbKeyS Then cmd_down.BackColor = &HFF0000: cmd_down.Picture =
cmd_down.DownPicture: downstatus = 2: Label5.Caption = "Sending Data": Label5.ForeColor = &HFF00&
If KeyCode = vbKeyLeft Or KeyCode = vbKeyA Then cmd_left.BackColor = &HFF0000: cmd_left.Picture =
cmd_left.DownPicture: rightstatus = 4: Label5.Caption = "Sending Data": Label5.ForeColor = &HFF00&
If KeyCode = vbKeyRight Or KeyCode = vbKeyD Then cmd_right.BackColor = &HFF0000: cmd_right.Picture =
cmd_right.DownPicture: leftstatus = 8: Label5.Caption = "Sending Data": Label5.ForeColor = &HFF00&
If KeyCode = vbKeyH Then hornstatus = 32: Label5.Caption = "Sending Data": Label5.ForeColor = &HFF00&
End Sub
Gambar 4.30 Program Controller
53
Pada bab ini akan dibahas mengenai uji coba terhadap aplikasi deserta
robot yang telah dibuat dan selanjutnya akan dibuat evaluasi dari hasil uji coba
tersebut. Uji coba dilaksanakan untuk mengetahui apakah aplikasi dapat berjalan
dengan baik sesuai perancangan yang dibuat. Evaluasi dilakukan untuk
menentukan tingkat keberhasilan dari aplikasi yang dibuat.
5.1 Skenario Uji Coba
Berdasarkan perancangan di bab sebelumnya maka dapat dibuat 2 skenario
utama yang akan diuji coba, yaitu :
a. Uji Coba Aplikasi (Software).
b. Uji Coba Robot (Hardware).
5.2 Pelaksanaan Uji Coba
Pada sub-bab ini akan dijelaskan step-by-step mengenai pelaksanaan
skenario uji coba yang telah dijabarkan pada sub-bab sebelumnya, untuk
membuktikan uji coba aplikasi dan robot disertakan gambar tentang
kejadian-kejadian yang sedang berlangsung pada laptop dan robot.
5.2.1 Uji Coba Aplikasi
a. Uji Coba Koneksi
Berikut ini adalah cara untuk mengkoneksikan aplikasi ke robot (router) :
Gambar 5.1 Input IP
3) Buka aplikasi wifi_robot.exe seperti gambar 5.2.
Gambar 5.2 Aplikasi
4) Tekan tombol “T” pada keyboard untuk mengkoneksikannya, sehingga
Gambar 5.3 Koneksi
b. Uji Coba Pengiriman Data
Dalam uji coba pengiriman data ini diharapkan aplikasi dapat mengirim
data sesuai inputan dari user, di antaranya sebagai berikut :
1) Untuk maju tekan tombol panah maju pada keyboard seperti pada gambar 5.4.
gambar 5.5.
Gambar 5.5 Tombol Mundur
3) Untuk belok kanan tekan tombol panah kanan pada keyboard seperti pada
gambar 5.6.
gambar 5.7.
Gambar 5.7 Tombol Belok Kiri
5) Untuk klakson tekan tombol “H” pada keyboard seperti pada gambar 5.8.
Sebelum melakukan uji coba robot pastikan semua hardware sudah
terangkai menjadi satu seperti gambar 5.9 berikut :
Gambar 5.9 Robot Wifi
Nyalakan semua power pada masing-masing hardware secara bersamaan,
sehingga LED merah pada rangkaian PIC16F628A menyala seperti pada gambar
5.10 berikut ini :
Tunggu sampai LED hijau pada rangkaian PIC16F628A menyala seperti
pada gambar 5.11, dan robot siap dijalankan.
6.1 Kesimpulan
Dari pelaksanaan uji coba didapatkan kesimpulan sebagai berikut :
1) Waktu tunda (delay) dari koneksi TCP/IP pada pergerakan robot sama
dengan mobil RC aslinya.
2) Kurang efisien dikarenakan remote menggunakan laptop.
6.2 Saran
Berikut beberapa saran yang dapat diberikan berdasarkan hasil
perancangan, implementasi, dan uji coba yang telah dilakukan sebelumnya, yaitu :
1) Untuk pengembangan lebih lanjut, dapat di tambahkan camera ip dan
lampu sorot yang bisa dikontrol.
2) Aplikasi ini dapat dibuat dengan menggunakan bahasa pemrograman lain,
terutama yang dapat digunakan pada handphone sehingga lebih efisien.
3) Robot dapat dikembangkan sehingga dapat di akses melalui media internet.
4) Dalam satu remote (laptop) dapat menjalankan beberapa robot secara
Elex Media Komputindo.
Budiharto, Widodo, & Rizal, Gamayel. (2007). 12 Proyek Mikrokontroler untuk
Pemula , Jakarta : Elex Media Komputindo.
Halim, Sandi. (2007). Merancang Mobile Robot Pembawa Objek Menggunakan
OOPic-R, Jakarta : Elex Media Komputindo.
Nalwan, Paulus Andi. (2009). Membuat Sendiri Robot Humanoid, Jakarta : Elex
Media Komputindo.
Bennet t , Jonat han. “ WRT54GL Dual Serial Port and SD Card M ods” , diakses online 23 Juni 2010, 20:17 dari http://www.jb.projects.net/articles/wrt54gl.mods/
Bennet t , Jonat han. “ Wifi Robot ” , diakses online 23 Juni 2010, 20:33 dari
http://www.jb.projects.net/projects/wifi_robot/
UART test program for 16F628, diakses online 25 Juni 2010, 21:13 dari
http://www.oz1bxm.dk/PIC/628uart.htm
Irfan, Ahmad. ” Mengenal Openwrt, Apa itu Openwrt ?” , diakses online 25 Juni
2010, 21:20 dari
http://www.ahmad.web.id/2010/01/08/mengenal-openwrt-apa-itu-openwrt/
Perez, Carlos. “Recently in WRT54G Category”, diakses online 2 Juli 2010, 19:40
Bishop, Eric. “Writing and Compiling A Simple Program For OpenWrt”, diakses
online 2 Juli 2010, 19:48 dari
http://gargoyle-router.com/old-openwrt-coding.html
Kelas Mikrokontrol, diakses online 19 Juli 2010, 20:13 dari
http://www.kelas-mikrokontrol.com/
TX2/RX2, diakses online 19 Juli 2010, 20:30 dari
http://www.bit-racing.de/tuning/TX-2RX-2.pdf
Fungsi dan Arti Istilah Router pada sebuah jaringan, diakses online 19 Juli 2010,
20:35 dari
http://www.g-excess.com/post/fungsi-dan-arti-istilah-router-pada-sebuah-jaringan.html
Setiawardhana. “Assembly”, diakses online 22 Agustus 2010, 20:50 dari
http://www2.eepis-its.edu/~setia/AssemblyDwnld.html
Pemrograman Visual Basic 6.0, diakses online 22 Agustus 2010, 20:52 dari
http://lavorchid.wordpress.com/2009/03/13/pemrograman-visual-basic-60/
Robot, diakses online 25 November 2010, 19:25 dari