KONTROL MOTOR DC
H – Bridge motor driver
1.1
a. Tujuan Percobaan :
1. Mahasiswa dapat memahami prinsip kerja motor DC 2. Mahasiswa dapat mengontrol motor DC dengan arduino b. Teori dasar
Motor DC
1. Overview Motor DC
Motor DC merupakan jenis motor yang menggunakan tegangan searah sebagai sumber tenaganya. Dengan memberikan beda tegangan pada kedua terminal tersebut, motor akan berputar pada satu arah, dan bila polaritas dari tegangan tersebut dibalik maka arah putaran motor akan terbalik pula. Sebuah motor DC terdiri dari komponen statis atau disebut stator dan komponen yang berputar pada sumbunya yang disebut rotor. Berdasarkan tipe mesinnya, baik stator maupun rotor mengandung konduktor untuk mengalirkan arus listrik yang berbentuk lilitan. Biasanya stator dan rotor dibuat dari besi untuk meperkuat medan magnet. Skema dari sebuah motor DC ditunjukkan pada gambar di bawah ini.
Salah satu kesulitan dari motor DC adalah hampir seluruh peralatan elektronik bekerja dengan arus AC. Jika hanya terdapat arus AC sementara kita perlu menjalankan motor DC, kita harus menggunakan converter yang akan merubah arus AC menjadi arus DC.
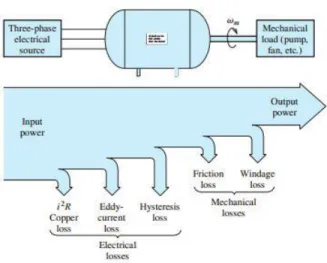
Losses, Power Ratings, and Efficiency
Gambar diatas menggambarkan aliran daya dari sumber listrik tiga fasa melalui sebuah motor induksi ke beban mekanik seperti pompa. Pada hal ini terjadi kehilangan energi yang terkonversi menjadi panas yang disebabkan oleh tahanan lilitan, histeresis, dan eddy current. Daya yang hilang juga bisa diakibatkan oleh gesekan dan pengaruh angin dalam motor.
Daya input yang disediakan oleh sumber listrik tiga fasa dihitung berdasarkan persamaan
Dimana Vrms adalah nilai rata-rata dari tegangan, Irms adalah nilai rata-rata dari arus dan cos θ adalah power factor.
Sedangkan daya output mekaniknya adalah Pout = Tout. ωm
Dimana Tout adalah torque putput dan ωm adalah kecepatan sudut dari beban (rad/s) Efisiensi dari motor dihitung dengan rumus
Motor listrik yang didesain dengan baik mempunyai efisiensi sekitar 85 – 95%.
Torque-Speed Characteristics
Misalkan sebuah sistem dengan motor induksi tiga fasa membawa beban sebuah pompa. Momen yang dibutuhkan untuk membawa beban tersbut juga diketahui. Anggap sistem tersebut pada awalnya mati kemudian saklar ditutup, akan terjadi hubungan antara sumber listrik dengan motor. Pada kecepatan yang rendah, momen yang dihasilkan oleh motor lebih besar dari yang dibutuhkan oleh beban. Kelebihan momen ini menyebabkan sistem berakselerasi. Pada akhirnya, kecepatan tersebut membuat stabil kelebihan ini sehingga momen yang dihasilkan oleh motor besarnya sama dengan momen yang dibutuhkan untuk membawa beban.
Pengatur Kecepatan
Berdasarkan karakteristik momen dan kecepatan, sebuah motor dapat memperlambat kejanya saat momen yang dibutuhkan oleh beban bertambah. Pengatur kecepatan ini didefinisikan sebagai perbedaan antara kecepatan saat tidak ada beban dengan kecepatan pada saat beban puncak, diekspresikan dalam bentuk persentase terhadap kecepatan pada saat beban puncak.
Karakteristik Operasi Synchronous-Motor
Kecepatan operasi pada sebuah synchronous motor adalah konstan dan dihitung dengan rumus
dimana ω adalah sudut dari sumber AC dan P adalah jumlah kutub magnet yang dimiliki oleh mesin tersebut. Dalam satuan rpm, rumusnya menjadi
Karakteristik Operasi Motor Induksi
Motor induksi memiliki momen awal yang cukup baik. Pada keadaan normal, kecepatan dari motor induksi hanya kurang sedikit daripada motor synchronous speed. Sebagai contoh, pada keadaan dengan beban, motor induksi dengan 4 kutub magnet bekerja pada 1750 rpm, dan pada saat tidak ada beban kecepatannya melebihi 1800 rpm.
Pada proses penyalaan, arus yang diambil dari motor induksi dapat lebih besar beberapa kali dari arus pada keadaan full beban. Untuk mencegah kelebihan arus, motor induksi biasanya dinyalakan dengan tegangan yang diperkecil. Seperti yang diharapkan, momen yang dihasilkan oleh sebuah motor bergantung pada tegangan yang dipakai. Pada kecepatan tertentu, momen dari sebuah motor induksi sebanding dengan kuadrat dari besar tegangan yang diberikan pada dinamo. Ketika menyalakan motor pada kondisi setengah tegangan seharusnya, momen yang dihasilkan hanya sekitar seperempat dari nilai yang sebenarnya.
Karakteristik Operasi Motor DC Shunt-Connected
Motor DC terdiri dari medan lilitan pada stator dan lilitan kumparan dinamo pada rotor. Karakteristik kecepatan-momen cukup berbeda pada saat dihubungkan secara paralel (shunt). Karakteristik kecepatan-momen pada Motor DC yang terhubung paralel memiliki momen awal yang sangat besar dan membutuhkan arus awal yang sangat besar pula. Biasanya, sebuah tahanan dipasangkan secara seri dengan kumparan dinamo pada saat penyalaan untuk membatasi arus yang timbul berada pada batas yang wajar.
Untuk supply tegangan yang tetap dan arus yang tetap, mesin DC yang terhubung paralel hanya menunjukkan variasi kecepatan yang kecil disekitar jangkauan kerja normalnya.
Karakteristik Operasi Motor DC Series-Connected
Motor DC yang terhubung seri memiliki momen dan arus awal yang cukup rumit. Kecepatannya secara otomatis menyesuaikan terhadap jangkauan yang besar ketika
momen beban nilainya berubah-ubah. Karena motor ini memperlambat beban yang lebih besar, daya output yang dihasilkan cenderung konstan daripada motor tipe lainnya. Hal ini merupakan kelebihan dari motor ini karena motor ini dapat beroperasi disekitar power rating maksimum untuk variasi yang besar dari momen beban.
Pada beberapa kasus, kecepatan pada saat tidak ada beban dari motor DC seri dapat berlebih hingga mencapai titik yang berbahaya. Sebuah sistem kontrol yang memutuskan motor dari sumber listrik dibutuhkan jika terdapat kemungkinan kehilangan beban mekanik (beban rusak).
2. Prinsip Kerja Motor DC
Prinsip kerja motor DC sangat mirip dengan mesin linier sederhana. Gambar dibawah ini menunjukkan rangkaian motor DC.
Sumber tegangan DC VT dihubungkan dengan resistansi RA dan sebuah saklar yang tertutup pada t=0 pada sepasang rel konduksi. Sebuah batang konduksi bergeser pada rel ini. Dengan asumsi rel dan batang tidak memiliki resistansi, terbentuk medan magnet yang mengarah ke dalam bidang gambar, tegak lurus dengan bidang rel dan batang.
Misalkan batang tersebut tidak bergerak ketika saklar ditutup pada t=0. Sesaat setelah saklar ditutup, timbul arus iA yang mengalir searah jarum jam mengelilingi rangkaian. Gaya listrik yang dihasilkan pada batang adalah
Arah gaya ini adalah ke kanan.
Gaya ini menyebabkan batang bergerak ke kanan. Karena batang meiliki kecepatan u meotong garis-garis medan magnet, terbentuk tegangan induksi di sepanjang batang. Tegangan ini besarnya positif pada ujung atas batang dan dinyatakan dengan persamaan
Perlu diperhatikan bahwa tegangan induksi eA berlawanan arah dengan tegangan VT. Arus yang dihasilkan akibat pengaruh tegangan induksi ini adalah
Dengan terbentuknya kecepatan pada batang, energi diserap melalui tegangan induksi eA, dan energi ini ditunjukkan sebagai energi kinetik pada batang.
Pengoperasian sebagai Motor
Misalkan beban mekanik yang melawan gaya ke arah kiri dihubungkan dengan batang tersebut. Batang ini akan melambat perlahan-lahan menghasilkan penurunan tegangan induksi. Arus yang mengalir searah karum jam menghasilkan gaya induksi magnetik yang mengarah ke kanan. Pada saat batang melambat sehingga gaya magnetik yang timbul bernilai sama dengan gaya dari beban, sistem motor tersebut bekerja pada kecepatan yang konstan. Pada keadaan ini, daya yang diberikan oleh tegangan VT sebagian dikonversi menjadi panas pada resistansi RA dan sebagian lagi menjadi daya mekanik.
Pengoperasian sebagai Generator
Misalkan batang tersebut bergerak pada kecepatan konstan sehingga eA = VT dan arusnya nol. Kemudian jika sebuah gaya diberikan pada batang agar bergerak semakin cepat, maka kecepatannya akan bertambah dan tegangan induksi eA akan melebihi sumber VT dan arus akan berbalik arah menjadi berlawanan dengan jarum jam. Keadaan ini ditunjukkan pada gambar dibawah ini.
Karena arus berlawanan arah, maka gaya induksinya juga akan menjadi ikut melawan arah semula yaitu mengarah ke kiri. Tegangan induksi ini akan memberikan daya sebesar ke resistansi dan beterai. Dengan demikian, energi mekanik dikonversi menjadi energi listrik yang menimbulkan rugi-rugi (panas) pada resistansi atau disimpan sebagai energi kimia pada baterai. Pada umumnya rotor silinder yang mengandung banyak konduktor digunakan untuk menghasilkan gaya yang lebih besar dengan desain yang minimal.
3. Jenis-Jenis Motor DC Motor DC Shunt
Pada motor shunt, gulungan medan (medan shunt) disambungkan secara paralel dengan gulungan dinamo (A). Oleh karena itu total arus dalam jalur merupakan penjumlahan arus medan dan arus dinamo. Karakter kecepatan motor DC tipe shunt adalah :
Kecepatan pada prakteknya konstan tidak tergantung pada beban (hingga torque tertentu setelah kecepatannya berkurang) dan oleh karena itu cocok untuk penggunaan komersial dengan beban awal yang rendah, seperti peralatan mesin.
Kecepatan dapat dikendalikan dengan cara memasang tahanan dalam susunan seri dengan dinamo (kecepatan berkurang) atau dengan memasang tahanan pada arus medan (kecepatan bertambah).
Motor DC Tipe Seri Dalam motor seri, gulungan medan (medan shunt) dihubungkan secara seri dengan gulungan dinamo (A). Oleh karena itu, arus medan sama dengan arus dinamo. Karakter kecepatan dari motor DC tipe seri adalah :
Kecepatan dibatasi pada 5000 RPM
Harus dihindarkan menjalankan motor seri tanpa ada beban sebab motor akan mempercepat tanpa terkendali.
Motor DC Gabungan/Kombinasi
Motor DC Tipe Kompon/Gabungan Motor Kompon DC merupakan gabungan motor seri dan shunt. Pada motor kompon, gulungan medan (medan shunt) dihubungkan secara paralel dan seri dengan gulungan dinamo (A). Sehingga, motor kompon memiliki torque penyalaan awal yang bagus dan kecepatan yang stabil.
Karakter dari motor DC tipe kompon/gabungan ini adalah, makin tinggi persentase penggabungan (yakni persentase gulungan medan yang dihubungkan secara seri), makin tinggi pula torque penyalaan awal yang dapat ditangani oleh motor ini.
Driver motor
Driver motor DC dalam artikel ini adalah driver motor DC tipe H-Bridge menggunakan power driver berupa transistor. Rangkaian driver motor DC H-Bridge transistor ini dapat mengendalikan arah putaran motor DC dalam 2 arah dan dapat dikontrol dengan metode PWM (pulse Width Modulation) maupun metode sinyal logika dasar TTL (High) dan (Low). Untuk pengendalian motor DC dengan metode PWM maka dengan rangkaian driver motor DC ini kecepatan putaran motor DC dapat dikendalikan dengan baik. Apabila menggunakan metode logika TTL 0 dan 1 maka rangkaian ini hanya dapat mengendalikan arah putaran motor DC saja dengan kecepatan putaran motor DC maksimum. Rangkaian driver motor DC H-Bridge ini menggunakan rangkaian jembatan transistor 4 unit dengan protesi impuls tegangan induksi motor DC berupa dioda yang dipasang paralel dengan masing-masing transistor secara reverse bias. Rangkaian driver motor DC secara detil dapat dilihat pada gambar berikut.
Rangkaian Driver Motor DC H-Bridge Transistor
Proses mengendalikan motor DC menggunakan rangkaian driver motor DC H-Bridge diatas dapat diuraikan dalam beberapa bagian sebagai berikut :
Driver Motor DC dengan metode logika TTL (0 dan 1) atau High dan Low hanya dapat mengendalikan arah putar motor DC dalam 2 arah tanpa pengendalian kecepatan putaran (kepatan maksimum). untuk mengendalikan motor DC dalam 2 arah dengan rangkaian driver motor dc h-bridge diatas konfiguarasi kontrol pada jalur input adalah dengan memberikan input berupa logika TTL ke jalur input A dan B.
Untuk mengendalikan arah putar searah jarum jam adalah dengan memberikan logika TTL 1 (high) pada jalur input A dan logika TTL 0 (low) pada jalur input B.
Untuk mengendalikan arah putar berlawanan arah jarum jam adalah dengan memberikan logika TTL 1 (high) pada jalur input B dan logika TTL 0 (low) pada jalur input A.
Driver motor DC dengan metode PWM (Pulse Width Modulation) dapat mengendalikan arah putaran motor DC dan kecepatan motor DC menggunakan pulsa PWM yang diberikan ke jalur input A dan B, dimana konfigurasi sinyal kontrol sebagai berikut.
Untuk mengendalikan arah putar motor DC searah jarum jam dengan kecepatan dikendalikan pulsa PWM maka jalur input B selalu diberikan logikan TTL 0 (Low) dan jalur input A diberikan pulsa PWM.
Untuk mengendalikan arah putar motor DC berlawanan arah jarum jam dengan kecepatan dikendalikan pulsa PWM maka jalur input A selalu diberikan logikan TTL 0 (Low) dan jalur input B diberikan pulsa PWM.
Kecepatan putaran motor DC dikendalikan oleh persentasi ton-duty cycle pulsa PWM yang diberikan ke jalur input rangkaian driver motor DC h-bridge transistor diatas.
c. Alat dan bahan :
1. Board Arduino + Kabel 2. Breadboard
3. Driver motor dc 4. Motor dc
d. Prosedur percobaan :
1. Motor DC, misalnya motor Tamiya, tidak dapat langsung dihubungkan dengan output Mikrokontroler, karena arusnya terlalu kecil. Untuk itu diperlukan rangkaian
H-bridge sebagai penguat arus sekaligus pengendali kecepatan motor dan arah putaran motor DC.
Rangkai modul H-Bridge, bodi Robot mobil (dengan 2 DC motor Tamiya) dan sumber tenaganya
Dengan bantuan sensor, misalnya sensor jarak, kita dapat membuat Robot Line tracer, Obstacle Avoider, light sensing, dll.
Program berikut ini adalah untuk menggerakkan Robot maju full speed dan mundur half speed.
2. Upload program berikut
Sketch:
int transistorPin = 9; // dari digital pin 9 ke pin signal PWM kiri (menggerkkan motor)
int transistorPin2 = 11; // dari digital pin 11 ke pin signal PWM kanan (menggerkkan motor)
int relayPin = 7; // dari digital pin 7 ke pin signal relay kiri (membalik putaran motor)
int relayPin2 = 5; // dari digital pin 5 ke pin signal relay kanan (membalik putaran motor)
void setup() {
// set the transistor pin as an output pinMode(transistorPin, OUTPUT); pinMode(transistorPin2, OUTPUT); // set the relay pin as an output pinMode(relayPin, OUTPUT); pinMode(relayPin2, OUTPUT); }
{
digitalWrite(7, LOW); // relay1 off - MAJU digitalWrite(5, LOW); // relay2 off - MAJU
analogWrite(9, 255); // motor 1 on, full speed - (nilai 0-255) analogWrite(11, 255); // motor 2 on, full speed - (nilai 0-255) delay(3000);
analogWrite(9, 0); // motor 1 off analogWrite(11, 0); // motor 2 off delay(3000);
digitalWrite(7, HIGH); // relay1 on - MUNDUR digitalWrite(5, HIGH); // relay2 on - MUNDUR
analogWrite(9, 125); // motor 1 on, half speed - (nilai 0-255) analogWrite(11, 125); // motor 2 on, half speed - (nilai 0-255) delay(3000);
analogWrite(9, 0); // motor 1 off analogWrite(11, 0); // motor 2 off delay(3000);
}
3. Amati yang terjadi
Motor Servo
1.2
a. Tujuan Percobaan :
1. Mahasiswa dapat memahami prinsip kerja motor servo 2. Mahasiswa dapat mengontrol motor servo dengan arduino
b. Teori dasar
Motor servo adalah sebuah motor DC yang dilengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Pada motor servo posisi putaran sumbu (axis) dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo.
Contoh Motor Servo Motor servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR) atau potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas maksimum putaran sumbu (axis) motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang pada pin kontrol motor servo.
Motor servo adalah motor yang mampu bekerja dua arah (CW dan CCW) dimana arah dan sudut pergerakan rotornya dapat dikendalikan dengan memberikan variasi lebar pulsa (duty cycle) sinyal PWM pada bagian pin kontrolnya.
Jenis Motor Servo
Motor Servo Standar 180°
Motor servo jenis ini hanya mampu bergerak dua arah (CW dan CCW) dengan defleksi masing-masing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°.
Motor Servo Continuous
Motor servo jenis ini mampu bergerak dua arah (CW dan CCW) tanpa batasan defleksi sudut putar (dapat berputar secara kontinyu).
Pulsa Kontrol Motor
Servo Operasional motor servo dikendalikan oleh sebuah pulsa selebar ± 20 ms, dimana lebar pulsa antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut maksimum. Apabila motor servo diberikan pulsa dengan besar 1.5 ms mencapai gerakan 90°, maka bila kita berikan pulsa kurang dari 1.5 ms maka posisi mendekati 0° dan bila kita berikan pulsa lebih dari 1.5 ms maka posisi mendekati 180°.
Motor Servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50 Hz. Dimana pada saat sinyal dengan frekuensi 50 Hz tersebut dicapai pada kondisi Ton duty cycle 1.5 ms, maka rotor dari motor akan berhenti tepat di tengah-tengah (sudut 0°/ netral).
Pada saat Ton duty cycle dari sinyal yang diberikan kurang dari 1.5 ms, maka rotor akan berputar ke berlawanan arah jarum jam (Counter Clock wise, CCW) dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan diposisi tersebut. Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5 ms, maka rotor akan berputar searah jarum jam (Clock Wise, CW) dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle, dan bertahan diposisi tersebut.
c. Alat dan bahan :
1. Board Arduino + Kabel 2. Breadboard
3. Potensiometer 4. Motor servo
d. Prosedur percobaan :
1. Hubungkan motor servo dengan arduino seperti gambar berikut :
2. Upload program berikut :
Sketch : #include <Servo.h> Servo servo1; int val; void setup() { servo1.attach(2); } void loop() { val = analogRead(0); val = map(val, 0, 1023, 0, 179); servo1.write(val); delay(15);
}
3. Amati yang terjadi
Motor Stepper
1.3
a. Tujuan Percobaan :
1. Mahasiswa dapat memahami prinsip kerja motor stepper 2. Mahasiswa dapat mengontrol motor stepper dengan arduino b. Teori dasar
Motor Stepper
Motor Stepper adalah suatu motor listrik yang dapat mengubah pulsa listrik yang diberikan menjadi gerakan motor discret (terputus) yang disebut step (langkah). Satu putaran motor memerlukan 360° dengan jumlah langkah yang tertentu perderajatnya. Ukuran kerja dari motor stepper biasanya diberikan dalam jumlah langkah per-putaran per-detik.
Contoh Motor Stepper
Motor stepper bergerak berdasarkan urutan pulsa yang diberikan kepada motor. Karena itu, untuk menggerakkan motor stepper diperlukan pengendali motor stepper yang membangkitkan pulsa-pulsa periodik. Pada dasar-nya terdapat 3 tipe motor stepper yaitu:
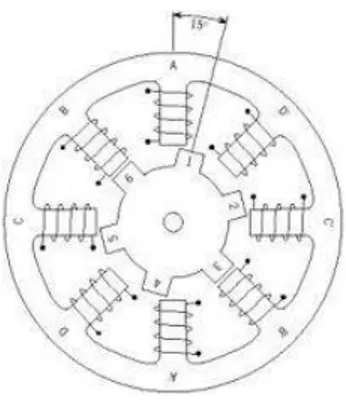
Motor Stepper Tipe Variable Reluctance (VR)
Motor stepper jenis ini telah lama ada dan merupakan jenis motor yang secara struktural paling mudah untuk dipahami. Motor ini terdiri atas sebuah rotor besi lunak dengan beberapa gerigi dan sebuah lilitan stator. Ketika lilitan stator diberi energi dengan arus DC, kutub-kutubnya menjadi termagnetasi. Perputaran terjadi ketika gigi-gigi rotor tertarik oleh
kutub-kutub stator. Berikut ini adalah penampang melintang dari motor stepper tipe variable reluctance (VR):
Gambar penampang melintang motor stepper variable reluctance (VR)
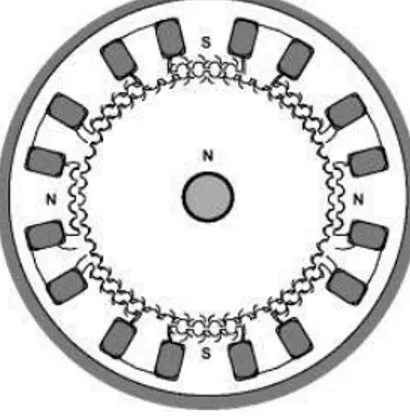
Motor Stepper Tipe Permanent Magnet (PM)
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar (tin can) yang terdiri atas lapisan magnet permanen yang diselang-seling dengan kutub yang berlawanan. Dengan adanya magnet permanen, maka intensitas fluks magnet dalam motor ini akan meningkat sehingga dapat menghasilkan torsi yang lebih besar. Motor jenis ini biasanya memiliki resolusi langkah (step) yang rendah yaitu antara 7,5° hingga 15° per langkah atau 48 hingga 24 langkah setiap putarannya. Berikut ini adalah ilustrasi sederhana dari motor stepper tipe permanent magnet:
Gambar ilustrasi motor stepper permanent magnet (PM)
Motor stepper tipe hibrid memiliki struktur yang merupakan kombinasi dari kedua tipe motor stepper sebelumnya. Motor stepper tipe hibrid memiliki gerigi seperti pada motor tipe VR dan juga memiliki magnet permanen yang tersusun secara aksial pada batang porosnya seperti motor tipe PM. Motor tipe ini paling banyak digunkan dalam berbagai aplikasi karena kinerja lebih baik. Motor tipe hibrid dapat menghasilkan resolusi langkah yang tinggi yaitu antara 3,6° hingga 0,9° per langkah atau 100-400 langkah setiap putarannya. Berikut ini adalah penampang melintang dari motor stepper tipe hibrid:
Gambar penampang melintang
motor stepper hibrid Berdasarkan metode perancangan rangkain pengendali motor stepper, motor stepper dapat dibagi menjadi jenis unipolar dan bipolar.
Motor Stepper Jenis Unipolar
Rangkaian pengendali motor stepper unipolar lebih mudah dirancang karena hanya memerlukan satu switch / transistor setiap lilitannya. Untuk menjalankan dan menghentikan motor ini cukup dengan menerapkan pulsa digital yang hanya terdiri atas tegangan positif dan nol (ground) pada salah satu terminal lilitan (wound) motor sementara terminal lainnya dicatu dengan tegangan positif konstan (VM) pada bagian tengah (center tap) dari lilitan. Ilustrasi Motor stepper dengan lilitan unipolar
Motor Stepper Jenis Bipolar
Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang berubah-ubah dari positif ke negatif dan sebaliknya. Jadi pada setiap terminal lilitan (A & B) harus dihubungkan dengan sinyal yang mengayun dari positif ke negatif dan sebaliknya. Karena itu dibutuhkan rangkaian pengendali yang agak lebih kompleks daripada rangkaian pengendali untuk motor unipolar. Motor stepper bipolar memiliki keunggulan dibandingkan dengan motor stepper unipolar dalam hal torsi yang lebih besar untuk ukuran yang sama.
Ilustrasi Motor stepper dengan lilitan bipolar
Motor stepper memiliki karakter yang lebih dibanding motor DC seperti berikut : Sudut rotasi motor proporsional dengan pulsa input sehingga lebih mudah diatur.
Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak
Posisi dan pergerakan repetisinya dapat ditentukan secara presisi
Memiliki respon yang sangat baik terhadap start, stop dan berbalik perputaran
Sangat realibel karena tidak adanya brush yang bersentuhan dengan rotor seperti pada motor DC
Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel langsung ke porosnya
Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range yang luas.
IC Driver motor
IC L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC. Konstruksi pin driver motor DC IC l293D adalah sebagai berikut.
Konstruksi Pin Driver Motor DC IC L293D
Fungsi Pin Driver Motor DC IC L293D
Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC
Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC
Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
Feature Driver Motor DC IC L293D
Driver motor DC IC L293D memiliki feature yang lengkap untuk sebuah driver motor DC sehingga dapat diaplikasikan dalam beberapa teknik driver motor DC dan dapat digunakan untuk mengendalikan beberapa jenis motor DC. Feature yang dimiliki driver motor DC IC L293D sesuai dengan datasheet adlah sebagai berikut :
Wide Supply-Voltage Range: 4.5 V to 36 V
Separate Input-Logic Supply
Internal ESD Protection
Thermal Shutdown
High-Noise-Immunity Inputs
Functionally Similar to SGS L293 and SGS L293D
Output Current 1 A Per Channel (600 mA for L293D)
Peak Output Current 2 A Per Channel (1.2 A for L293D)
Output Clamp Diodes for Inductive Transient Suppression (L293D)
Pada gambar driver IC L293D diatas adalah contoh aplikasi dari keempat unit driver motor DC yang dihubungkan secar berbeda sesuai dengan keinginan dan kebutuhan.
c. Alat dan bahan :
1. Board Arduino + Kabel 2. Breadboard
3. Driver Motor Stepper 4. Motor Stepper 5. Kabel jumper
d. Prosedur percobaan :
1. Hubungkan motor, IC driver dan arduino seperti gambar berikut :
2. Upload program berikut :
Sketch :
// Motor stepper half step
void setup(){
pinMode(8,OUTPUT); pinMode(9, OUTPUT); pinMode(10, OUTPUT); pinMode(11, OUTPUT);
} void loop(){ digitalWrite(8,1); digitalWrite(9,0); digitalWrite(10,0); digitalWrite(11,0); delay(50); digitalWrite(8,1); digitalWrite(9,1); digitalWrite(10,0); digitalWrite(11,0); delay(50); digitalWrite(8,0); digitalWrite(9,1); digitalWrite(10,0); digitalWrite(11,0); delay(50); digitalWrite(8,0); digitalWrite(9,1); digitalWrite(10,1); digitalWrite(11,0); delay(50); digitalWrite(8,0); digitalWrite(9,0); digitalWrite(10,1); digitalWrite(11,0); delay(50); digitalWrite(8,0);
digitalWrite(9,0); digitalWrite(10,1); digitalWrite(11,1); delay(50); digitalWrite(8,0); digitalWrite(9,0); digitalWrite(10,0); digitalWrite(11,1); delay(50); digitalWrite(8,1); digitalWrite(9,0); digitalWrite(10,0); digitalWrite(11,1); delay(50); }
// Motor stepper full step
void setup(){ pinMode(8,OUTPUT); pinMode(9, OUTPUT); pinMode(10, OUTPUT); pinMode(11, OUTPUT); } void loop(){ digitalWrite(8,1); digitalWrite(9,0); digitalWrite(10,0); digitalWrite(11,0); delay(50);
digitalWrite(8,0); digitalWrite(9,1); digitalWrite(10,0); digitalWrite(11,0); delay(50); digitalWrite(8,0); digitalWrite(9,0); digitalWrite(10,1); digitalWrite(11,0); delay(50); digitalWrite(8,0); digitalWrite(9,0); digitalWrite(10,0); digitalWrite(11,1); delay(50); } Amatilah yang terjadi