BAB II
TINJAUAN PUSTAKA 2.1 Daya
Daya merupakan kecepatan melakukan kerja atau kecepatan energi berubah dari satu bentuk ke bentuk lainnya, satuan daya adalah watt atau J/s. (K.G. Jackson,1994).
Daya reaktif merupakan daya yang tidak dapat diubah manjadi tenaga, tetapi diperlukan untuk menghasilkan medan magnet yang diperoleh dari alat-alat induksi. Penjumlahan secara vector daya aktif dan daya rekatif menghasilkan daya semu (kVA). Daya semu merupakan daya yang disuplai oleh PLN. Jika nilai daya semu (kVA) diperbesar dengan faktor daya konstan maka rugi-rugi daya (kVAR) menjadi besar. Dengan demikian daya aktif, daya reaktif, dan daya semu merupakan suatu kesatuan yang dapat digambarkan dalam segitiga siku-siku sebagimana ditunjukkan pada gambar dibawah ini.
Gambar 2.1 Segitiga Daya Faktor daya = Cosϕ = ...(2.1) Q (VAR) = S(VA) x Sin ϕ
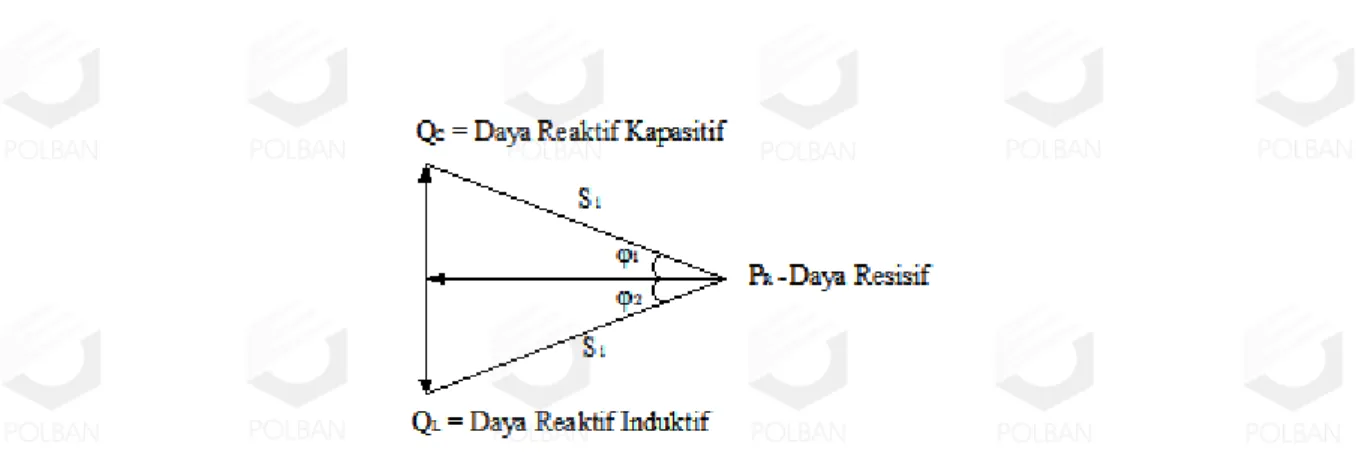
Dari gambar segitiga di atas, nilai daya reaktif berbanding lurus dengan sin φ dan berbanding terbalik dengan faktor daya (cosφ). Harga cosφ dapat diperbesar dengan mengurangi daya reaktif induktif(kVAR). Daya reaktif yang bersifat induktif dikurangi dengan cara menambahkan suatu sumber daya daya reaktif kapasitif yaitu berupa kapasitor. Proses pengurangan itu bisa terjadi karena kedua beban (inductor dan kapasitor) arahnya berlawanan, seperti pada gambar berikut.
Gambar 2.2 Hubungan Daya pada Beban Kapasitif, Induktif, Dan Resistif Dengan kecilnya daya rektif dapat menghasilkan beberapa keuntungan antara lain : 1. Harga faktor daya menjadi besar.
2. Mengurangi rugi-rugi daya semu pada sistem. 3. Mengurangi drop tegangan pada jaringan.
2.1.1 Daya pada Beban Resistif, Induktif dan Kapasitif.
Pada beban resistif murni arus mempunyai fasa yang sama dengan tegangan. Nilai gelombang daya pada beban resistif ini selalu positif yang berarti bahwa daya selalu diserap oleh beban dan tidak pernah dikembalikan ke sumber. Gelombang daya memiliki frekuensi yang sama dengan arus dan tegangan dengan nilai dua kali nilai frekuensi tegangan dan arus.
Gambar 2.3 Bentuk Gelombang pada Beban Resistif Murni
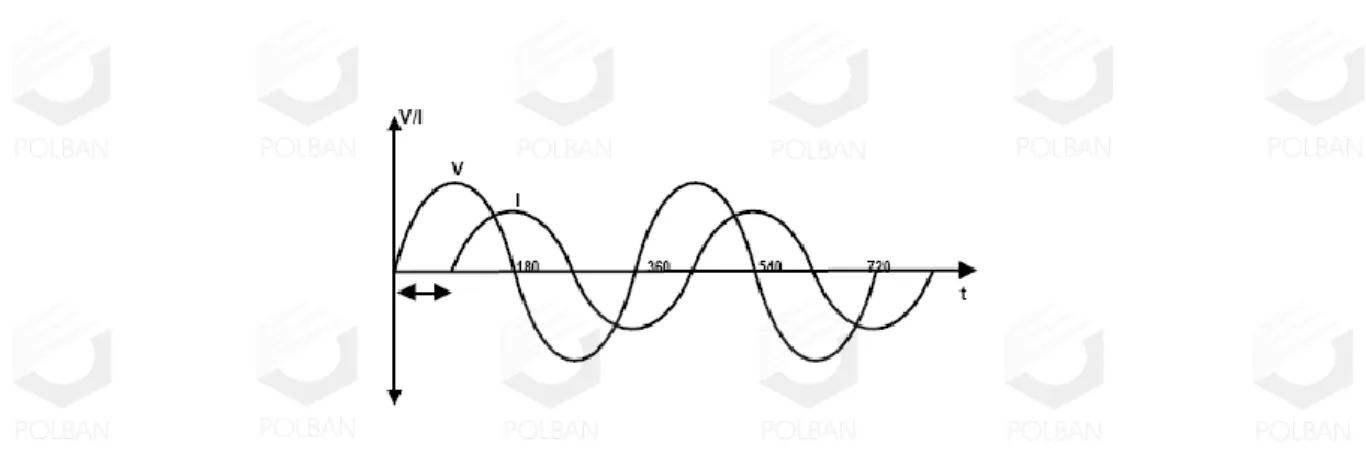
Untuk beban reaktif murni nilai bergantian antara gelombang positif dan negatif. Ini berarti bahwa daya secara bergantian diserap dari sumber dan dikembalikan lagi kesumber.
Gambar 2.4 Bentuk Gelombang pada Beban Induktif Murni
Pada beban yang terdiri dari resistansi dan reaktansi, gelombang daya terdiri dari nilai positif dan negatif, tetapi jumlah gelombang daya positif akan lebih besar daripada gelombang daya negatif. Dengan kata lain, kombinasi antar resistansi dan reaktansi akan mengkonsumsi lebih banyak daya daripada mengembalikannya ke sumber.
Gambar 2.5 Bentuk Gelombang pada Beban Kapasitif Murni (Herman Filani, Ir.Abdul Nasir , Epyk Sunarno. SST,MT) 2.1.2 Komponen Daya
Gambar 2.6 Komponen Daya
Keterangan : S = Daya semu = V x I* (VA) P = Daya Aktif (watt)
Q = Daya Reaktif (VAR) V = Tegangan (V)
I* = Arus konjugit (Ampere)
ϕ = Sudut fasa antara tegangan dan arus a. Daya reaktif
Daya reaktif (reactive power) merupakan daya yang terdapat pada beban reaktif yaitu inductor dan kapasitor. Daya ini diserap oleh beban reaktif dan dikembalikan lagi ke sumber. Satuan daya reaktif adalah VAR (voltage-ampere-reaktif) dengan simbol matematik huruf capital Q.
Q = V x I* x Sin φ ...(2.2) Sin φ =
b. Daya aktif
Daya aktif merupakan daya yang dikonsumsi oleh beban resistif yang digunakan untuk mengubah bentuk energi listrik ke bentuk energi lain. Satuan daya aktif adalah W (watt) dengan simbol matematik huruf kapital P. Dengan kata lain, daya aktif adalah perkalian antara faktor daya dengan daya semu.
P = V x I* x cosφ ...(2.3) Cosφ =
c. Daya Semu
Daya semu (apparent power) merupakan total daya yang terdapat pada rangkaian AC atau perkalian secara vector antara tegangan dan arus. Satuan daya semu adalah VA (Volt- Ampere) dengan simbol kapital S.
S = V x I*
2.1.3 Faktor Daya (Cosφ)
Bila arus berbentuk sinusoidal maka faktor daya didefinisikan sebagai cosinus sudut yang dibentuk antara simpangan nol (zero crossing) tegangan dan simpangan nol arus, dengan tegangan sebagai acuan (K.G. Jackson,1994). Dengan kata lain, faktor daya merupakan perbandingan antara daya aktif dan daya semu.
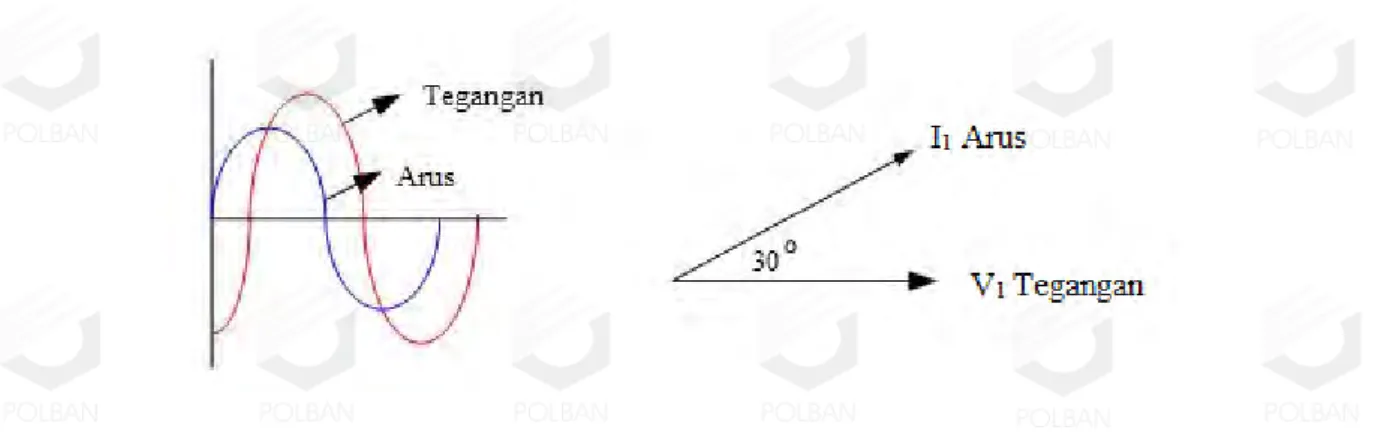
a. Faktor Daya Mendahului (Leading Power Faktor)
Kondisi ini terjadi jika arus mendahului tegangan dengan tegangan sebagai referensi. Kondisi ini terjadi pada beban yang bersifat kapasitif.
Gambar 2.7 Arus mendahului 30o dari tegangan
b. Faktor daya tertinggal (lagging power factor)
Kondisi ini terjadi jika arus tertinggal dari tegangan, dengan tegangan referensi. Kondisi ini terjadi pada beban yang bersifat induktif.
Gambar 2.8 Arus tertinggal 30o dari tegangan
2.1.4 Koreksi Faktor Daya
Koreksi faktor daya merupakan penggunaan peralatan untuk mengembalikan faktor daya yang tertinggal sehingga mendekati nilai satu. Hal ini dapat dilakukan dengan menggunakan kompensator sinkron atau kapasitor statik. Kapasitor yang digunakan untuk memperbaiki karakteristik sistem disebut kapasitor sistem daya. Kapasitor akan mengurangi daya semu yang dirasakan sumber, dengan sifat kapasitor dan induktor saling mengurangi maka daya reaktif menjadi kecil. Bila daya reaktif menjadi kecil sementara daya aktif tetap maka harga faktor daya menjadi besar akibatnya daya semu menjadi kecil.
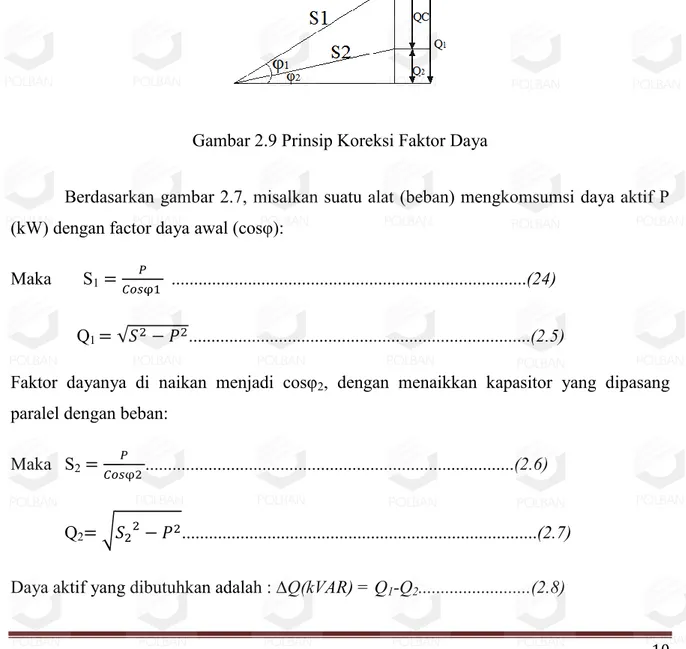
Gambar 2.9 Prinsip Koreksi Faktor Daya
Berdasarkan gambar 2.7, misalkan suatu alat (beban) mengkomsumsi daya aktif P (kW) dengan factor daya awal (cosφ):
Maka S1 ...(24) Q1 √ ...(2.5)
Faktor dayanya di naikan menjadi cosφ2, dengan menaikkan kapasitor yang dipasang
paralel dengan beban:
Maka S2 ...(2.6)
Q2 √ ...(2.7)
Daya aktif yang dibutuhkan adalah : ∆Q(kVAR) = Q1-Q2...(2.8)
besarnya kapasitor yang harus dipasang: C(farad) = ...(2.9)
Besarnya persentase pengurangan kerugian daya reaktif dengan memperbaiki faktor daya adalah:
[ ] x 100%
2.2 Komponen Elektronika
Secara umum komponen elektronoka dapat dibagi kedalam dua kelompok yaitu elmen aktif dan elemen pasif. Elemen aktif merupakan elemen yang mamapu menyediakan daya rata-rata lebih besar dari nol selama interval waktu yang tak berhingga, tahanan temasuk dalam kategoriini. Energi yang diterima tahanan diubah menjadi panas. (Malvino, 1985).
2.2.1 Resistor
Resistor merupakan komponen dasar elektronika yang digunakan untuk membatasi jumlah arus yang mengalir dalam satu rangkaian dan umumnya terbuat dari bahan karbon. Hukum ohm menyatakan bahwa tegangan melintasi berbagai jenis bahan penghantar adalah berbanding lurus dengan arus yang mengalir dengan bahan tersebut.
V = RxI ...(2.11) Keterangan : V = Tegangan (volt)
R = Resistansi (ohm) I = Arus (ampere) 2.2.2 Kapasitor
Kapasitor merupakan omponen elektronika yang dapat menyimpan muatan listrik dan terbuat dari dua buah plat metal yang dipisahkan oleh suatu bahan dielektrik. Bahan-bahan dielektrik yang umumnya dikenal antara udara vacum, keramik, dan gelas.
Kapasitansi merupakan kemampuan dari suatu kapasitor untuk dapat menampung muatan elektron.
...(2.12) Xc = ...(2.13) Keterangan : C = Kapasitansi (farad)
V = Tegangan (volt) I = Arus (ampere)
Xc = Impedansi kapasitif (ohm) F = Frekwensi (Hz)
2.2.3 Induktor
Induktor merupakan komponen elektronika pasif yang dapat menghasilkan tegangan listrik yang berbanding lurus dengan perubahan sesaat dari arus listrik yang mengalir melaluinya. Secara matematik dapat ditulis:
V = -L x ...(2.14) XL = 2 x π x f x L... ... ... ...(2.15)
Keterangan : V = Tegangan (volt) I = Arus (ampere)
XL = Reaktansi Induktif (ohm)
F = Frekwensi (Hz)
1.3 Operasional Amplifier (Op-Amp)
Operational amplifier merupakan komponen IC yang memiliki dua tegangan input dan satu tegangan output dengan tegangan outputnya proporsional terhadap perbedaan tegangan antara kedua inputnya. Secara sedderhana, op-amp terdiri dari tiga bagian dasar yaitu penguat differensial impedansi masukan tinggi, penguat tegangan dengan penguatan tinggi, dan penguat keluaran impedansi rendah.
Gambar 2.10 Diagram Skematik Operational Amplifier
Op-amp mempunyai dua input yaitu input inverting (-) dan input non inverting (+). Umumnya amp bekerja dengan dual supply (+Vcc dan –Vcc) namun banyak juga Op-amp dibuat dengan singgle supply (Vcc – ground). Rin adalah resistansi input yang nilai idealnya infinit (tak hingga). Rout adalah resistansi output dan besar resistansi idealnya nol. Sedangkan Aol adalah nilai penguatan open lup dan nilai idealnya tak hingga. Fungsi Op-amp yang paling penting adalah sebagai penguat sinyal. Penguatan tersebut tergantung mode operasi yang digunakan. Tegangan maksimum output Op-amp ± 90% dari tegangan catu dayanya, karena ada tegangan jatuh internal dan keadaan ini dinyatakan saturasi. 1.4 Kontroler On – Off (Two Position Controller)
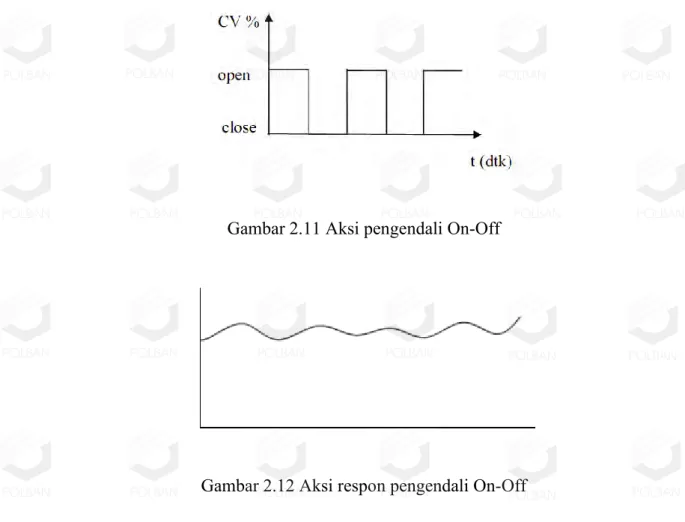
Karakteristik kontroler on-off ini hanya bekerja pada 2 posisi, yaitu on dan off. Kerja kontroler on-off banyak digunakan pada aksi pengontrolan yang sederhana karena harganya murah. Karena sistem kerja yang digunakan adalah on-off saja, hasil output dari sistem pengendalian ini akan menyebabkan proses variabel tidak akan pernah konstan.
Besar kecilnya fluktuasi process variabel ditentukan oleh titik dimana kontroller dalam keadaaan on dan off. Pengendalian dengan aksi kontrol ini juga menggunakan feedback.
Gambar 2.11 Aksi pengendali On-Off
Gambar 2.12 Aksi respon pengendali On-Off
Respon output dari system pengendali on-off ini merupakan proses variabel yang bergelombang dan tidak pernah konstan. Perubahan proses variable akan seirama dengan perubahan posisi final control element. Besar kecilnya fluktuasi proses variable ditentukan oleh titik dimana controller “on” dan titik dimana controller “off”.
1.5 Saklar Statik Semikonduktor
Saklar yang digunakan dalam sistem elektronika daya adalah komponen-komponen semikonduktor daya yang secara mikroskopis tidak dapat bagian-bagian yang bergerak. Oleh karena itu, saklar semacam ini sering disebut dengan saklar statik smikonduktor. Saklar statik semikonduktor dapat diklasifikasikan kedalam tiga kelompok yaitu:
Saklar tak terkendali, contoh dioda;
Saklar setengah terkendali, contoh SCR (Silicon Controlled Rectifier); dan
Saklar terkendali, contoh Triac, transistor bipolar, MOSFET, GTO (Gate Turn Off Switch) dan IGBT.
1.5.1 Dioda
Dioda termasuk komponen semikonduktor daya jenis saklar tak terkendali. Dioda terbuat dari bahan semikonduktor tipe P dan N dengan arah arus hanya dapat mengalir dari sisi P menuju sisi N.
Gambar 2.13 Simbol, Struktur, dan Kurva Karakteristik Dioda
Dioda baru dapat menghantar ketika tegangan bias maju diatas nol volt, hal ini disebabkan karena adanya dinding deplesi (deplesion layer). Untuk dioda yang terbuat dari bahan silikon tegangan konduksi diatas 0,7 volt dan 0,2 volt untuk dioda yang terbuat dari bahan germanium. Untuk tegangan bias negatif, dioda tidak dapat mengalirkan arus sampai batas beberapa puluh bahkan ratusan volt, jika batas ini dilampaui maka akan terjadi breakdown, sehingga dioda tidak lagi menahan aliran elektron yang terbentuk di lapisan deplesi.
1.5.2 TRIAC
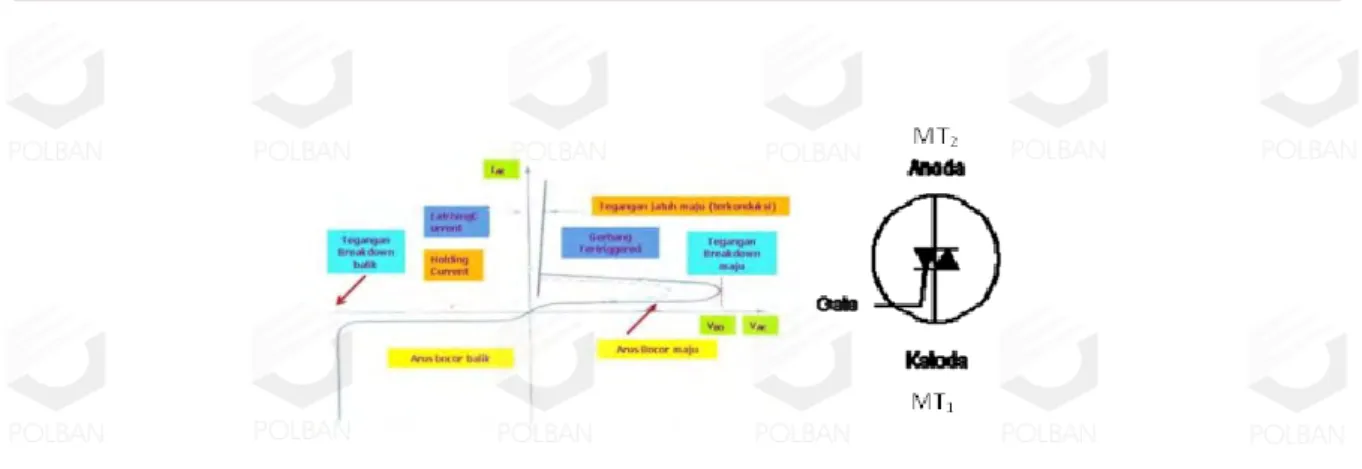
TRIAC merupakan komponen semikonduktor daya jenis saklar terkendali. TRIAC dapat bersifat konduktif dalam dua arah dan biasanya digunakan untuk pengendlian fasa AC (contoh: kontroller tegangan AC, inverter, dan saklar AC).
Secara sederhana, TRIAC dapat dimodelkan sebagai dua buah thyristor yang dipasangkan anti paralel dengan gate yang digabungkan. Oleh karena itu, TRIAC dapat menghantar pada kedua arah sehingga kaki-kakinya dinamakan MT1 dan MT2.
Gambar 2.14 Karakteristik dan Simbol TRIAC
Jika terminal MT2 positif (bertindak sebagai anoda) terhadap MT1 (bertindak
sebagai katoda), maka triac dapat dihidupkan denga memberikan sinyal positif antara gate dan terminal MT1. TRIAC dapat menghantar (keadaan konduksi), jila arus pada MT2 lebih
besar dari suatu nilai yang disebut dengan latching current, IL. Latching current, IL adalah
arus anoda minimum yang diperlukan agar dapat membuat triac tetap pada kondisi hidup (konduksi) jika sinyal gate dihilangkan. TRIAC akan tetap On, ketika arus maju anoda (MT2) berada diatas satu tingkatan holding current, IH. Holding current IH adalah arus
minimum yang dibutuhkan untuk mempertahankan TRIAC pada kondisi On. Holding current IH terjadi pada orde miliampere dan lebih kecil dari latching current sehingga IH<IL.
1.6 Power Supply DC
Tegangan yang di butuhkan oleh peralatan elektronik adalah tegangan rendah yaitu kurang atau sama dengan 24 volt DC. Sehingga diperlukan sebuah alat yang dapat menurunkan tegangan dan disearahkan sehingga menghasilkan tegangan DC sebesar 24 volt. Pada Gambar dibawah ditunjukkan rangkaian penurun tegangan dan penghasil tegangan DC. Penurun tegangan ini berupa autotrafo dan penghasil tegangan DC berupa penyearah jembatan.
Gambar 2.15 Rangkaian Power Supply 1.7 Sensor Arus
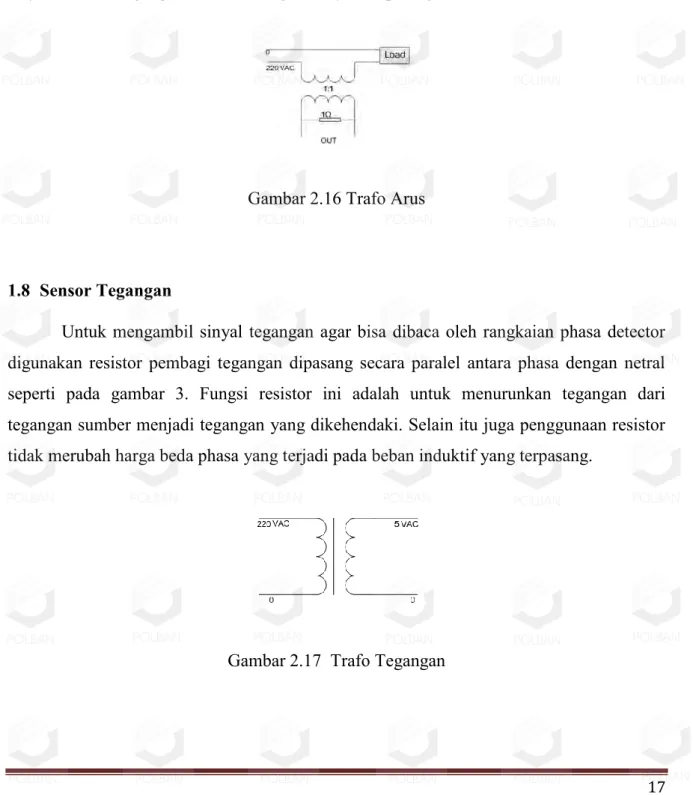
Sensor arus berfungsi untuk mendeteksi dan menghitung arus yag dipakai oleh konsumen. Mendeteksi arus diperlukan untuk menghitung daya rata-rata yang digunakan oleh konsumen.Rangkaian sensor ini terdiri dari sensor arus dan tegangan, dimana masing-masing menggunakan trafo arus dan tegangan. Rangkaian ini berfungsi untuk mendeteksi sinyal arus dan tegangan. Gambar rangkaiannya ada pada gambar dibawah ini.
Gambar 2.16 Trafo Arus
1.8 Sensor Tegangan
Untuk mengambil sinyal tegangan agar bisa dibaca oleh rangkaian phasa detector digunakan resistor pembagi tegangan dipasang secara paralel antara phasa dengan netral seperti pada gambar 3. Fungsi resistor ini adalah untuk menurunkan tegangan dari tegangan sumber menjadi tegangan yang dikehendaki. Selain itu juga penggunaan resistor tidak merubah harga beda phasa yang terjadi pada beban induktif yang terpasang.
Gambar 2.17 Trafo Tegangan
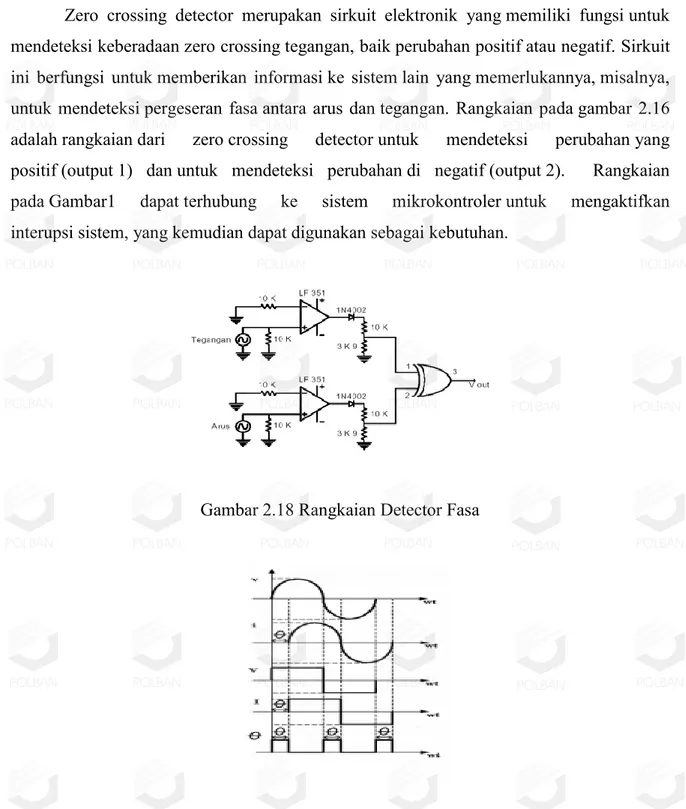
1.9 Zero Cross Detector
Zero crossing detector merupakan sirkuit elektronik yang memiliki fungsi untuk mendeteksi keberadaan zero crossing tegangan, baik perubahan positif atau negatif. Sirkuit ini berfungsi untuk memberikan informasi ke sistem lain yang memerlukannya, misalnya, untuk mendeteksi pergeseran fasa antara arus dan tegangan. Rangkaian pada gambar 2.16 adalah rangkaian dari zero crossing detector untuk mendeteksi perubahan yang positif (output 1) dan untuk mendeteksi perubahan di negatif (output 2). Rangkaian pada Gambar1 dapat terhubung ke sistem mikrokontroler untuk mengaktifkan interupsi sistem, yang kemudian dapat digunakan sebagai kebutuhan.
Gambar 2.18 Rangkaian Detector Fasa
Gambar 2.19 Gelombang Input dan Output pada Rangkaian Detektor Fasa 1.10 Rangkaian Integrator
Rangkaian integrator sederhana ini dipergunakan untuk mengubah sinyal pulsa dari
pada mikrokontroller. Rangkaian integrator ini digunakan karena frekwensi output dari rangkaian zero crossing detector konstan pada setiap perubahan cosφ walaupun lebar pulsa pada setiap perubahan cosφ berubah-ubah, sehingga jika menggunakan menggunakan rangkaian F to V maka tegangan output tidak akan mengalami perubahan. Rangkaian ini dapat mendeteksi setiap perubahan lebar pulsa yang dikonversi menjadi tegangan linier. 1.11 Mikrokontroler Atmega8535
Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus. Biasanya digunakan untuk pengontrolan otomatis dan manual pada perangkat elektronika. Beberapa tahun terakhir, mikrokontroler sangat banyak digunakan terutama dalam pengontrolan robot. Seiring perkembangan elektronika, mikrokontroler dibuat semakin kompak dengan bahasa pemrograman yang juga ikut berubah. Salah satunya adalah mikrokontroler AVR (Alf and Vegard’s Risc processor) ATmega8535 yang menggunakan teknologi RISC (Reduce Instruction Set Computing) dimana program berjalan lebih cepat karena hanya membutuhkan satu siklus clock untuk mengeksekusi satu instruksi program.
(Anonim : Agus Bejo, 2007)
1.12 Rangkaian Soft Switch dengan thyristor triac
Pada gambar dibawah dapat dilihat bahwa pin 2 pada optocoupler diberi inputan aktif low dari mikrokontroller sebagai trigger agar gate terbuka, sehingga tegangan dari pin 6 dapat melewati pin 4. Tegangan tersebut digunakan untuk mentrigger gate pada thyristor agar kapasitor bank yang dipasang secara parallel dapat bekerja atau mengkompensasi.
Gambar 2.20 Rangkaian Soft Switch dengan Thyristor Triac.