ix
INTISARI
Penggemar balap mobilan membutuhkan penghitung kecepatan untuk mobil-mobilan yang digunakan. Selain itu pengkodean untuk mobil-mobil-mobilan yang digunakan juga sangat diperlukan. Penghitung kecepatan dibutuhkan untuk mengetahui kecepatan yang dihasilkan. Mendapatkan kecepatan yang dihasilkan merupakan faktor yang sangat penting dalam perakitan mobil-mobilan. Pada penelitian ini, penghitung laju menggunakan RFID merupakan alat yang sesuai untuk sistem penghitung kecepatan dan pengkodean mobil-mobilan.
Sistem ini berbasis mikrokontroler Arduino uno menggunakan penampil LCD sebagai petunjuk kecepatan yang dihasilkan. Alat ini juga dilengkapi dengan sensor photodioda sebagai sensor awal atau start. Metode dalam pengambilan kecepatan dengan langkah awal memilih jarak panjang lintasan. Mobil-mobilan yang digunakan harus terdapat tag RFID yang sudah dimasukan pada program. Kecepatan tidak akan dihasilkan jika kode tag RFID tidak masuk dalam pemrograman. Sistem penghitung laju ini tidak akan berjalan jika langkah dalam pengambilan kecepatan tidak sesuai dengan urutan.
Hasil akhir penghitung kecepatan menggunakan alat ini menunjukkan bahwa kecepatan minimal yang dapat dihasilkan dan ditampilkan pada LCD adalah sebesar 0,01 m/s dan kecepatan maksimal adalah 1,81 m/s dengan ketelitian sebesar 95% dan error 5%
ix
ABSTRACT
Toy racing car fans very need speed calculation for toy car are they use. Other than that coding for a toy car used. Is very necessary speed calculation is needed to know for the speed resulting getting the resultant speed is the important thing in the toy car assembly. In the research, the rate calculation using RFID. Is an approp rate tool for counting system and encoding speed toy car.
This system based microcontroller arduino uno using LCD viewer as the resulting speed manual this tools also came with photodiode sensor as the starting sensor. Methods in making the race with a first step choose a long distance path. Toy cars that used to be ccontain tag RFID that have been included in the program. The speed can’t be resultant if the tag RFID not included in the program. System speed calculation is not working if the step in making speed is not in order.
The final result speed calculation use this tools to show the minimum speed can be showed in LCD is 0.01 m/s and maximum speed is 1.81 m/s with the accuracy 95 % and error 5 %.
i
TUGAS AKHIR
PENGHITUNG LAJU MENGGUNAKAN RFID
BERBASIS ARDUINO
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
CHAROLOS HANUNG AJI AGUNG NUGRAHA
NIM : 135114059
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
SPEED CALCULATION SYSTEM USING RFID
BASED ON ARDUINO
Presented as Partial Fullfillment of Requirements
To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
by:
CHAROLOS HANUNG AJI AGUNG NUGRAHA
NIM : 135114059
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
HALAMAN
PERSETUJUANTUGAS
AKHIR
PENGHITUNG
LAJU MENGGUNAKAN RFID
BERBASIS
ARDUINO
(SPEED CALCUL,ATE
USING
RFID
BASED ON
ARDUINO)
lll
efi**
ffi
*
S&#
hk
,#r
Pernbimbing
HALAMAN
PENGESAI{T{N
TUGAS
AKHIR
PENGHITUNG
LAJU
MENGGT]NAKAN
RFID
BERBASIS
ARI}UINO
Oleh:
Ketua
Sekretaris
Anggota
Yogyakart4
23
maBef
2o6
Fakultas Sains dan Teknologi Universitas Sanda Dharma
i Mungkasi, S.Si., M.Math.Sc., Ph.D.
PERNYATAAN
KE,ASLIAN
KARYA
"Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini
tidak memuatkarya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah."
Yogyakarta, 19 F
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO
The Formulas of a success are a hard
work and never give up
Dengan ini kupersembahkan karyaku ini untuk..
Tuhanku Yesus Kristus,
Kedua orang tua yang selalu mendukung serta mendoakan ku,
Bapak Djoko Untoro Suwarno,S.Si.,M.T. Selaku Dosen Pembimbing
Teman-temanku seperjuangan,
Dan semua orang yang mengasihiku
HALAMAN
PERNYATAAN
PERSETUJUAN
PUBLIKASI KARYA
ILMIAH
UNTUK
IGPEI\TINGAN
AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : Charolos Hanung Aji Agung Nugraha
Nomor Mahasiswa : 135114059
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas
Sanata Dharma karya ilmiah saya yang be4'udul :
PENGHITUI{G LAJU MENGGUNAKAII
RFID
BERBASISARDUINO
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada
Perpustakaan Universitas Sanata Dharma hak unfuk menfmpan, mengalihkan dalam bentuk
media 1ain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas, dan
mempublikasikannya
di
internet atau media lain untuk kepantingan akademis tanpa perlumeminta ijin dari saya maupun memberikan royalty kepada saya selama tetap mencantumkan
nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya.
Yogyakarta, 19 f;ebruari 2016
viii
INTISARI
Penggemar balap mobil-mobilan membutuhkan penghitung kecepatan untuk mobil-mobilan yang digunakan. Selain itu pengkodean untuk mobil-mobilan yang digunakan juga sangat diperlukan. Penghitung kecepatan dibutuhkan untuk mengetahui kecepatan yang dihasilkan. Mendapatkan kecepatan yang dihasilkan merupakan faktor yang sangat penting dalam perakitan mobil-mobilan. Pada penelitian ini, penghitung laju menggunakan RFID merupakan alat yang sesuai untuk sistem penghitung kecepatan dan pengkodean mobil-mobilan.
Sistem ini berbasis mikrokontroler Arduino uno menggunakan penampil LCD sebagai petunjuk kecepatan yang dihasilkan. Alat ini juga dilengkapi dengan sensor photodioda sebagai sensor awal atau start. Metode dalam pengambilan kecepatan dengan langkah awal memilih jarak panjang lintasan. Mobil-mobilan yang digunakan harus terdapat tag RFID yang sudah dimasukan pada program. Kecepatan tidak akan dihasilkan jika kode tag RFID tidak masuk dalam pemrograman. Sistem penghitung laju ini tidak akan berjalan jika langkah dalam pengambilan kecepatan tidak sesuai dengan urutan.
Hasil akhir penghitung kecepatan menggunakan alat ini menunjukkan bahwa kecepatan minimal yang dapat dihasilkan dan ditampilkan pada LCD adalah sebesar 0,01 m/s dan kecepatan maksimal adalah 1,81 m/s dengan ketelitian sebesar 95% dan error 5%
ix
ABSTRACT
Toy racing car fans very need speed calculation for toy car are they use. Other than that coding for a toy car used. Is very necessary speed calculation is needed to know for the speed resulting getting the resultant speed is the important thing in the toy car assembly. In the research, the rate calculation using RFID. Is an approp rate tool for counting system and encoding speed toy car.
This system based microcontroller arduino uno using LCD viewer as the resulting speed manual this tools also came with photodiode sensor as the starting sensor. Methods in making the race with a first step choose a long distance path. Toy cars that used to be ccontain tag RFID that have been included in the program. The speed can’t be resultant if the tag RFID not included in the program. System speed calculation is not working if the step in making speed is not in order.
The final result speed calculation use this tools to show the minimum speed can be showed in LCD is 0.01 m/s and maximum speed is 1.81 m/s with the accuracy 95 % and error 5 %.
x
KATA PENGANTAR
Puji dan Syukur penulis panjatkan kepada Tuhan Yesus Kristus karena telah
memberikan berkat-Nya sehingga penulis dapat menyelesaikan laporan akhir ini dengan
baik. Laporan akhir ini disusun untuk memenuhi syarat memperoleh gelar sarjana.
Penulis mengucapkan terima kasih kepada :
1. Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta.
2. Ketua Program Studi Teknik Elektro Universitas Sanata Dharma Yogyakarta.
3. Djoko Untoro Suwarno , S.Si., M.T., sebagai dosen pembimbing yang dengan
penuh pengertian dan ketulusan hati memberi bimbingan, kritik, saran, serta
motivasi dalam penulisan skripsi ini.
4. B. Wuri Harini , S.Si., M.T., Martanto , S.T., M.T., sebagai dosen penguji yang
telah memberikan masukan, bimbingan, saran dalam merevisi skripsi ini.
5. Keluarga besar yang sangat saya cintai, atas dukungan, doa, cinta, perhatian, kasih
sayang yang tiada henti.
6. Pacar tersayang atas dukungan, doa, perhatian, dan kasih sayang yang tiada henti.
7. Staff sekretariat Teknik Elektro, atas bantuan dalam melayani mahasiswa.
8. Kawan-kawan seperjuangan transferan DIII Mekatronika angkatan 2013 Teknik
Elektro,para dosen Mekatronika yang telah memberikan saran serta motivasi dan
semua kawan yang senantiasa mendukung saya dalam menyelesaikan tugas akhir
ini.
9. Semua pihak yang tidak dapat disebutkan satu persatu atas semua dukungan yang
telah diberikan dalam penyelesaian skripsi ini.
Penulis menyadari bahwa dalam penyusunan laporan akhir ini masih mengalami
kesulitan dan tidak lepas dari kesalahan. Oleh karena itu, penulis mengharapkan masukan,
kritik dan saran yang membangun agar skripsi ini menjadi lebih baik. Dan semoga skripsi
ini dapat bermanfaat sebagaimana mestinya.
Penulis
xi
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
LEMBAR PERNYATAAN PERSETUJAN KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xi
DAFTAR GAMBAR ... xiv
DAFTAR TABEL ... xvi
DAFTAR PERSAMAAN………xvii
DAFTAR LAMPIRAN………...xviii
BAB I PENDAHULUAN 1.1. LatarBelakang ... 1
1.2. TujuanPenelitian ... 2
1.3. BatasanMasalah ... 2
1.4. MetodologiPenelitian ... 3
BAB II DASAR TEORI 2.1. Mikrokontroler Arudino UNO ... 5
2.1.1 Fitur Arduino UNO…..... 8
2.1.2 Ringkasan Arduino UNO... 8
2.1.3 Deskripsi Mikrokontroler ATmega 328... 9
2.1.4 Power Arduino UNO ATmega 328... 11
2.1.5 Memori Arduino UNO ATmega 328... 11
2.1.6 Input dan Output... 12
2.1.7 Komunikasi SPI... 12
xii
2.2. RFID (Radio Frequency Identification) ... 14
2.2.1 Komponen Utama Sistem RFID... 15
2.2.2 Tag / Transponder RFID... 17
2.2.3 Reader RFID... 20
2.2.4 RFID Reader RC522... 21
2.3. LCD (Liquid Crystal Display)... 23
2.4. Tombol Push Button... 22
2.4.1 Prinsip Kerja Tombol Push Button... 26
2.4.2 Resistor Pull Up dan Pull Down... 27
2.5. Sensor Photodioda... 28
2.6. Kecepatan... 29
2.6.1 Kecepatan Rata-Rata... 29
BAB III PERANCANGAN PENELITIAN 3.1. Perancangan Sistem Secara Keseluruhan... 31
3.2. Perancangan Hardware... 32
3.2.1. Perancangan Regulator 5V... 32
3.2.2. Pin-pin yang Digunakan Pada Penelitian... 33
3.2.3. Pengkabelan Modul RFID dengan Arduino UNO... 34
3.2.4. Pengkabelan LCD dengan Arduino UNO... 38
3.2.5. Perancangan Rangkaian Tombol... 39
3.2.6. Perancangan Rangkaian Sensor Photodioda... 40
3.3. Perancangan Software... 41
3.4. Perancangan Diagram Alir... 42
3.4.1. Diagram Alir Arduino UNO... 42
3.5. Desain... 43
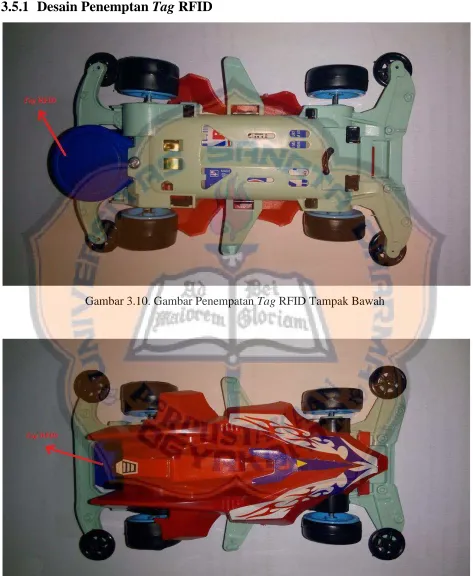
3.5.1. Desain Penempatan Tag RFID... 43
3.5.2. Desain Lintasan... 44
BAB IV HASIL DAN PEMBAHASAN 4.1. Bentuk Fisik Hardware ... 46
xiii
4.2.1 Cara Pengoperasian Alat ... 48
4.2.2 Cara Kerja Sistem ... 49
4.2.2.1 Modul-modul Pada Sistem ... 49
4.2.3 Komunikasi Reader RFID dengan Komputer ... 51
4.2.4 Pengujian Pembacaan Tag RFID ... 52
4.2.5 Pengujian Daya Tangkap Photodioda Terhadap LED ... 55
4.2.6 Pengujian Kecepatan Alat dan Software ... 57
4.3. Analisa Perangkat Lunak ... 66
4.3.1. Inisialisasi ... 66
4.3.2. Pembacaan Tag RFID ... 67
4.3.3. Tampilan LCD ... 68
BAB V KESIMPULAN DAN SARAN 5.1. Kesimpulan ... 70
5.2. Saran ... 70
DAFTAR PUSTAKA ... 71
xiv
DAFTAR GAMBAR
Gambar 1.1. Diagram Blok Prototipe Sistem ... 3
Gambar 2.1. Arduino UNO ATmega 328 ... 5
Gambar 2.2. Konfigurasi Pin Arduino UNO ATmega 328 ... 6
Gambar 2.3. Pim Mikrokontroler ATmega 328... 9
Gambar 2.4. Komponen Utama RFID ... 15
Gambar 2.5. Komponen Tag RFID... 18
Gambar 2.6. Reader RFID ... 21
Gambar 2.7. Tampilan RFID reader RC522 ... 21
Gambar 2.8. Data Sheet MFRC522 ... 22
Gambar 2.9. LCD ... 23
Gambar 2.10 Tombol Tekan ... 25
Gambar 2.11. Prinsip Kerja Tombol Push Button ... 26
Gambar 2.12. Simbol Tombol Push Button ... 26
Gambar 2.13.Rangkaian Resistorn Pull Up ... 27
Gambar 2.14.Rangkaian Resistor Pull Down ... 27
Gambar 2.15.Tampilan Sensor Photodioda ... 28
Gambar 2.16.Kedudukan Awal Benda A Berpindah ke Benda B ... 29
Gambar3.1. Diagram Blok Sistem ... 31
Gambar3.2. Rangkaian Regulator ... 32
Gambar3.3. Pengkabelan Modul RFID dengan Arduino UNO ... 34
Gambar3.4. Keluaran Tag RFID 1 ... 35
Gambar3.5. Keluaran Tag RFID 2 ... 36
Gambar3.6. Pengkabelan LCD dengan Arduino UNO ... 38
Gambar3.7. Rangkaian Tombol Jarak dan Reset ... 39
xv
Gambar3.9. Flowchart Sistem... 42
Gambar3.10. Penempatan Tag RFID Tampak Bawah ... 43
Gambar3.11. Penempatan Tag RFID Tampak Atas ... 43
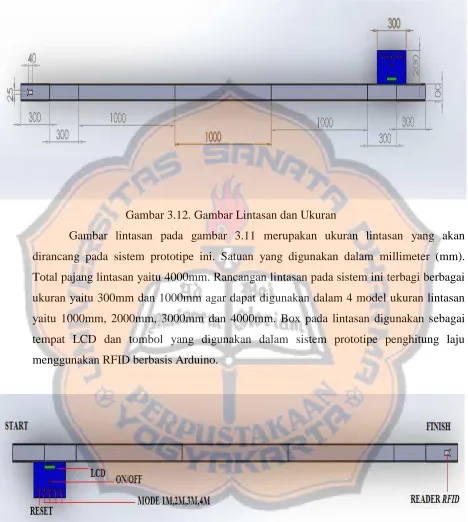
Gambar3.12. Gambar Lintasan dan Ukuran ... 44
Gambar3.13. Gambar Lintasan Tampak Atas ... 44
Gambar3.14. Gambar Lintasan Keseluruhan ... 45
Gambar 4.1. Tombol dan LCD Pada Hardware ... 46
Gambar 4.2. Penempatan Reader RFID pada Hardware ... 46
Gambar 4.3. Bentuk Fisik Lintasan ... 47
Gambar 4.4. Mobil - mobilan A... 47
Gambar 4.5. Mobil - mobilan B ... 47
Gambar 4.6. Modul Arduino dan Photodioda Yang digunakan Pada Sistem ... 50
Gambar 4.7. Modul Reader RFID ... 50
Gambar 4.8. Data Hasil Pembacaan Tag RFID dari Komputer ... 52
Gambar 4.9. Pengujian Jarak Pembacaan Tag RFID dari Samping ... 52
Gambar 4.10.Pengujian Jarak Pembacaan Tag RFID dari Atas ... 53
Gambar 4.11.Photodioda dan LED Pada Lintasan ... 55
Gambar 4.12.Grafik Pengujian dengan Lintasan 1 Meter ... 58
Gambar 4.13.Grafik Pengujian dengan Lintasan 2 Meter ... 59
Gambar 4.14.Grafik Pengujian dengan Lintasan 3 Meter ... 61
Gambar 4.15.Grafik Pengujian dengan Lintasan 4 Meter ... 62
Gambar 4.16.Grafik Percepatan Motor DC ... 64
Gambar 4.17.Grafik Tanggapan Motor ... 64
Gambar 4.18.Inisialisasi Program ... 66
Gambar 4.19.Program Pembacaan Tag RFID ... 67
Gambar 4.20.Program LCD ... 68
xvi
DAFTAR TABEL
Tabel 2.1. Tabel Karakteristik Rangkaian Pada Board Arduino UNO ... 7
Tabel 2.2. Spesifikasi Arduino ATmega 328 ... 8
Tabel 2.3. Tabel Frekuensi RFID yang Umum Beroperasi……… 17
Tabel 2.4. Karakteristik Umum Tag RFID………. 20
Tabel 2.5. Konfigurasi Pin RFID reader RC522……….22
Tabel 2.6. Tabel Pin LCD………24
Tabel 3.1. Tabel Penggunaan Pin Arduino UNO……….33
Tabel 4.1. Jarak Pembacaan Tag RFID dari Samping………..54
Tabel 4.2. Jarak Pembacaan Tag RFID dari Atas………... 54
Tabel 4.3. Kode Tag RFID dan ID Kartu……… 55
Tabel 4.4. Hasil Pengujian dari Photodioda Terhadap LED………... 56
Tabel 4.5. Percobaan dengan Lintasan 1m Mobil A………... 57
Tabel 4.6. Percobaan dengan Lintasan 1m Mobil B………58
Tabel 4.7. Percobaan dengan Lintasan 2m Mobil A………59
Tabel 4.8. Percobaan dengan Lintasan 2m Mobil B………59
Tabel 4.9. Percobaan dengan Lintasan 3m Mobil A………60
Tabel 4.10. Percobaan dengan Lintasan 3m Mobil B………60
Tabel 4.11. Percobaan dengan Lintasan 4m Mobil A………61
Tabel 4.12. Percobaan dengan Lintasan 4m Mobil B………62
Tabel 4.13. Percepatan pada Motor DC……….63
xvii
DAFTAR PERSAMAAN
Persamaan 2.1 ... 29
xviii
DAFTAR LAMPIRAN
L1. Tabel Hasil Pengujian Alat ... L1
L2. Pngkabelan dan Rangkaian Keseluruhan ... L2
L4. Data Sheet Komponen ... L4
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Kemajuan teknologi saat ini berkembang semakin pesat, tidak hanya di industri
tetapi di dalam dunia permainan. Selain itu semakin banyak sistem yang digunakan dalam
suatu permainan, salah satunya adalah balap mobil-mobilan. Dalam perhitungan laju
mobil masih banyak yang menggunakan sistem manual, seperti menggunakan stopwatch
untuk mengetahui waktu yang ditempuh dalam satu putaran. Penggunaan stopwatch tidak
terlalu tepat dalam perhitungan laju mobil-mobilan. Diperlukan sistem otomatis dalam
menghitung laju mobil agar pengguna mobil dapat mengetahui waktu yang ditempuh
mobil dalam satu putaran sirkuit dengan tepat sesuai dengan waktu yang ditempuh.
Penggunaan teknologi identifikasi dapat mempermudah dalam sistem pemberian
kode. Teknologi Identifikasi yang digunakan adalah RFID (Radio Frequency
Identification) yang sudah banyak digunakan dalam sistem keamanan. RFID adalah suatu metode yang dapat digunakan untuk menyimpan atau menerima data secara jarak jauh
dengan menggunakan suatu piranti yang bernama RFID tag atau transponder[3]. RFID
mempunyai jenis yang bervariasi tergantung frekuensi yang terdapat pada RFID. RFID
mudah didapatkan dipasaran. Terdapat berbagai variasi RFID dari harga yang paling
murah hingga mahal. Penggunaan reader RFID akan lebih mudah untuk mengidentifikasi
mobil yang melaju pada garis finish.
Prototipe yang akan dibuat dapat di aplikasikan dalam permainan balap mobil
yang mengutamakan waktu dan kecepatan mobil dalam menempuh satu putaran sirkuit.
Prototipe ini menggunakan dua mobil-mobilan yang masing-masing terpasang tag RFID
pada bagian bawah mobil. Reader RFID diletakan pada sirkuit yang akan dilewati
mobil-mobilan pada garis finish. Kode yang ada di tag RFID akan terdeteksi oleh reader RFID
saat mobil-mobilan melaju diatas reader RFID.
Saat sensor photodioda aktif maka sistem akan menghitung waktu laju mobil
tersebut hingga melewati reader RFID. Waktu yang ditempuh akan muncul pada LCD
terdeteksi oleh reader RFID. Waktu yang ditempuh mobil-mobilan dalam satu putaran
muncul pada LCD dalam satuan m/s. Sensor photodioda terletak pada sirkuit awal mula
mobil-mobilan tersebut berjalan.
1.2.
Tujuan dan Manfaat Penelitian
Tujuan dari penelitian ini adalah menghasilkan prototipe sistem penghitungan laju
dalam satuan m/s menggunakan RFID berbasis Arduino dan ditampilkan pada LCD.
Manfaat dari penelitian ini secara umum adalah mempermudah mengetahui laju mobil-mobilan yang melaju dengan kecepatan yang berbeda-beda. Manfaat bagi
masyarakat atau komunitas penggemar permainan balap mobil adalah untuk mengetahui
laju mobil-mobilan yang digunakan secara cepat.
1.3.
Batasan Masalah
Batasan masalah pada penelitian prototipe ini adalah :
a. Menggunakan RFID RC522 dengan frekuensi 13.56Mhz.
b. Sistem perhitungan laju mobil-mobilan menggunakan mikrokontroler Arduino Uno
c. Menggunakan LCD 2x16 untuk menampilkan hasil perhitungan laju mobil-mobilan.
d. Mobil-mobilan melaju pada sirkuit yang disediakan.
e. Menggunakan sensor photodioda pada awal untuk memulai pergerakan
mobil-mobilan.
f. Sistem perhitungan laju mobil-mobilan ini dirancang untuk suatu permainan
permainan balap mobil-mobilan.
g. Menggunakan sirkuit berdimensi 10cm x 400cm
h. Menggunakan 2 mobilan yang terpasang tag RFID pada bagian bawah
mobil-mobilan.
1.4.
Metodologi Penelitian
Metodologi penelitian yang digunakan dalam pembuatan prototipe penghitungan
laju mobil menggunakan RFID berbasis Arduino ini adalah sebagai berikut :
a. Mengumpulkan bahan dari berbagai buku dan jurnal yang berhubungan dengan
b. Perancangan sistem hardware dan software.
Perancangan ini bertujuan untuk mendapatkan komponen-komponen yang sesuai
dengan sistem yang akan dibuat. Dengan menghitung ukuran-ukuran komponen yang
digunakan.
Gambar.1.1. Diagram Blok Prototipe Sistem
c. Pembuatan sistem.
Berdasarkan gambar 1.1. Sensor photodioda dan tombol jarak merupakan inputan dari
mikrokontroler. Setelah mikrokontroler menerima inputan maka mikrokontroler akan
memproses inputan untuk memulai penghitungan laju mobil-mobilan. Setelah reader
RFID membaca adanya tag yang terdeteksi maka RFID memberikan sinyal atau
inputan ke mikrokontroler untuk menghentikan perhitungan dan menampilkan ke
LCD.
d. Menguji RFID
Pengujian ini bertujuan untuk mengetahui sistem kerja atau cara kerja RFID yang
e. Menguji mikrokontroler Arduino dengan menggunakan rangkaian sederhana.
Pengujian ini bertujuan untuk mengetahui bahasa program yang digunakan pada
Arduino dan sistem kerja Arduino.
f. Proses pengujian dan pengambilan data.
Teknik pengambilan data dilakukan dengan cara menguji keseluruhan sistem dan
menampilkan pada penampil LCD. Pengujian dilakukan dengan memberi sinyal
masukan ke mikrokontroler. Kemudian mikrokontroler memulai untuk menghitung
laju mobil-mobilan. Pengujian juga dilakukan dengan mengkomunikasikan reader
RFID dengan mikrokontroler dengan mengatur jarak antara tag RFID dengan reader
RFID. Reader RFID akan memberikan sinyal masukan ke mikrokontroler dan
menampilkan ke unit penampil LCD. Data yang tertampil pada LCD merupakan hasil
dari perhitungan laju mobil-mobilan.
g. Analisa dan penyimpulan hasil penelitian.
Analisa data dilakukan dengan mengamati kerja sistem yang dibuat apakah sistem
sesuai dengan apa yang diingkan. Mengecek kerja reader RFID dan Arduino serta
analisa dilakukan berdasarkan keakuratan dalam perhitungan laju mobil-mobilan
dengan menghitung secara manual dengan mengukur panjang sirkuit dan waktu yang
dibutuhkan.
h. Pembuatan laporan
Pembuatan laporan dilakukan dengan mengambil data semua hasil dari proses
5
BAB II
DASAR TEORI
2.2
Mikrokontroler Arduino UNO
[2]Arduino UNO adalah sebuah board mikrokontroler yang didasarkan pada
ATmega328. Arduino UNO mempunyai 14 pin digital input/output. Ada 6 input analog,
osilator, koneksi USB, power jack, ICSP header, dan tombol reset. Arduino UNO
memuat semua yang dibutuhkan untuk menunjang mikrokontroler, mudah
menghubungkannya ke sebuah computer dengan sebuah kabel USB atau mensuplainya
dengan sebuah adaptor AC ke DC atau menggunakan baterai untuk memulainya.
“Uno” berarti satu dalam bahasa Italia dan dinamai untuk menandakan keluaran
atau produk Arduino 1.0 selanjutnya. Arduino UNO dan versi 1.0 akan menjadi referensi
untuk versi-versi Arduino selanjutnya. Arduino UNO adalah sebuah seri terakhir dari
board Arduino USB dan model referensi untuk papan Arduino, untuk suatu perbandingan
dengan versi sebelumnya. Gambar 2.1 merupakan tampilan dari arduino uno ATmega
328.
Arduino memiliki kelebihan tersendiri dibanding board mikrokontroler yang lain
selain bersifat open source, arduino juga mempunyai bahasa pemrogramanya sendiri yang
berupa bahasa C. Selain itu dalam board arduino sendiri sudah terdapat loader yang
berupa USB sehingga memudahkan kita ketika kita memprogram mikrokontroler didalam
arduino. Sedangkan pada kebanyakan board mikrokontroler yang lain yang masih
membutuhkan rangkaian loader terpisah untuk memasukkan program ketika kita
memprogram mikrokontroler. Port USB tersebut selain untuk loader ketika memprogram,
bisa juga difungsikan sebagai port komunikasi serial. Sifat open source arduino juga
banyak memberikan keuntungan tersendiri untuk kita dalam menggunakan board ini,
karena dengan sifat open source komponen yang kita pakai tidak hanya tergantung pada
satu merek, namun memungkinkan kita bisa memakai semua komponen yang ada
dipasaran. Gambar 2.2 dan tabel 2.1 menjelaskan tentang konfigurasi pin dan
karakteristik rangkaian pada board arduino uno
2.1.1 Fitur Arduino UNO
[2]Board Arduino UNO memiliki fitur-fitur sebagai berikut:
1. Pinout 1.0: ditambah pin SDA dan SCL yang dekat dengan pin AREF dan dua pin
baru lainnya yang diletakkan dekat dengan pin RESET, IOREF yang memungkinkan
shield-shield untuk menyesuaikan tegangan yang disediakan dari board. Untuk ke
depannya, shield akan dijadikan kompatibel/cocok dengan board yang menggunakan
AVR yang beroperasi dengan tegangan 5V dan dengan Arduino Due yang beroperasi
dengan tegangan 3.3V. Yang ke-dua ini merupakan sebuah pin yang tak terhubung,
yang disediakan untuk tujuan kedepannya
2. Sirkit RESET yang lebih kuat
3. Atmega 16U2 menggantikan 8U2
2.1.2 Ringkasan Arduino UNO
[2]Tabel 2.2. Spesifikasi Arduino ATmega328[2]
Mikrokontroler ATmega328
Tegangan pengoperasian 5V
Tegangan input yang
disarankan 7-12V
Batas tegangan input 6-20V
Jumlah pin I/O digital 14 (6 di antaranya menyediakan keluaran PWM)
Jumlah pin input analog 6
Arus DC tiap pin I/O 40 mA
Arus DC untuk pin 3.3V 50 mA
Memori Flash 32 KB (ATmega328), sekitar 0.5 KB digunakan oleh bootloader
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
2.1.3 Deskripsi Mikrokontroler ATmega328
[2]Mikrokontroler Atmega328 mempunyai 28-pin dan 3 buah PORT utama yaitu
[image:30.612.93.544.178.584.2]PORTB, PORTC, PORTD. PORT tersebut dapat difungsikan sebagai input/output digital. Konfigurasi pin dapat dilihat pada gambar 2.3.
Gambar 2.3. Pin Mikrokontroler ATmega 328[2]
ATMega328 memiliki 3 buah PORT utama yaitu PORTB, PORTC, dan PORTD
dengan total pin input/output sebanyak 23 pin. PORT tersebut dapat difungsikan sebagai
input/output digital atau difungsikan sebagai periperal lainnya [2]: 1. Port B
Port B merupakan jalur data 8 bit yang dapat difungsikan sebagai input/output. Selain itu PORTB juga dapat memiliki fungsi alternatif seperti di bawah ini:
a. ICP1 (PB0), berfungsi sebagai Timer Counter 1 input capture pin.
b. OC1A (PB1), OC1B (PB2) dan OC2 (PB3) dapat difungsikan sebagai keluaran
PWM (Pulse Width Modulation).
c. MOSI (PB3), MISO (PB4), SCK (PB5), SS (PB2) merupakan jalur komunikasi
SPI.
e. TOSC1 (PB6) dan TOSC2 (PB7) dapat difungsikan sebagai
sumber clock external untuk timer.
f. XTAL1 (PB6) dan XTAL2 (PB7) merupakan sumber clock utama
mikrokontroler.
2. Port C
Port C merupakan jalur data 7 bit yang dapat difungsikan sebagai input/output digital. Fungsi alternatif PORTC antara lain sebagai berikut:
a. ADC6 channel (PC0,PC1,PC2,PC3,PC4,PC5) dengan resolusi sebesar 10 bit.
ADC dapat kita gunakan untuk mengubah input yang berupa tegangan analog
menjadi data digital.
b. I2C (SDA dan SDL) merupakan salah satu fitur yang terdapat pada PORTC. I2C
digunakan untuk komunikasi dengan sensor atau device lain yang memiliki
komunikasi data tipe I2C seperti sensor kompas.
3. Port D
Port D merupakan jalur data 8 bit yang masing-masing pin-nya juga dapat difungsikan sebagai input/output. Sama seperti Port B dan Port C, Port D juga
memiliki fungsi alternatif dibawah ini.
a. USART (TXD dan RXD) merupakan jalur data komunikasi serial dengan level
sinyal TTL. Pin TXD berfungsi untuk mengirimkan data serial, sedangkan RXD
kebalikannya yaitu sebagai pin yang berfungsi untuk menerima data serial.
b. Interrupt (INT0 dan INT1) merupakan pin dengan fungsi khusus sebagai interupsi hardware. Interupsi biasanya digunakan sebagai selaan dari program,
misalkan pada saat program berjalan kemudian terjadi
interupsi hardware/software maka program utama akan berhenti dan akan
menjalankan program interupsi.
c. XCK dapat difungsikan sebagai sumber clock external untuk USART, namun kita
juga dapat memanfaatkan clock dari CPU, sehingga tidak perlu membutuhkan external clock.
d. T0 dan T1 berfungsi sebagai masukan counter external untuk timer 1 dan timer 0.
2.1.4 Power Arduino UNO ATmega328
[2]Arduino UNO dapat disuplai melalui koneksi USB atau dengan sebuah power
supply eksternal. Sumber daya dipilih secara otomatis. Supply eksternal dapat diperoleh dari sebuah adaptor AC ke DC atau battery. Board Arduino UNO dapat beroperasi pada
sebuah supply eksternal 6 sampai 20 Volt. Jika menggunakan daya yang lebih kecil dari 5
Volt maka board Arduino UNO akan menjadi tidak stabil. Jika menggunakan supply
yang lebih dari besar 12 Volt maka voltage regulator bisa kelebihan panas dan
membahayakan board Arduino UNO. Range yang direkomendasikan adalah 7 sampai 12
Volt. Pin-pin dayanya adalah sebagai berikut:
1.
VIN. Tegangan input ke Arduino board ketika board sedang menggunakan sumbersupply eksternal (seperti 5 Volt dari koneksi USB atau sumber tenaga lainnya yang diatur). Kita dapat menyuplai tegangan melalui pin ini.
2.
5V. Pin output ini merupakan tegangan 5 Volt yang diatur dari regulator pada board.Board dapat disuplai dengan salah satu suplai dari DC power jack (7-12V), USB
connector (5V), atau pin VIN dari board (7-12).
3.
3V3. Sebuah suplai 3,3 Volt dihasilkan oleh regulator pada board. Arus maksimum yang dapat dilalui adalah 50 mA.4.
GND. Pin ground.Arduino UNO mempunyai sebuah sebuah sekring reset yang memproteksi port
USB komputer dari hubungan pendek dan arus lebih. Walaupun sebagian besar komputer
menyediakan proteksi internal sendiri, sekring menyediakan sebuah proteksi tambahan.
Jika lebih dari 500 mA diterima port USB, sekring secara otomatis akan memutuskan
koneksi sampai hubungan pendek atau kelebihan beban hilang.
Panjang dan lebar maksimum dari PCB Arduino UNO masing-masingnya adalah
2.7 dan 2.1 inci, dengan konektor USB dan power jack yang memperluas dimensinya.
Empat lubang sekrup memungkinkan board untuk dipasangkan ke sebuah permukaan
atau kotak. Sebagai catatan, bahwa jarak antara pin digital 7 dan 8 adalah 160 mil.
2.1.5 Memori Arduino UNO ATmega328
ATmega328 memiliki memori 32 KB (0.5 KB digunakan untuk bootloader).
ATmega328 juga memiliki 2 KB SRAM dan 1 KB EEPROM.
2.1.6
Input dan Output
Masing-masing dari 14 pin digital Uno dapat digunakan sebagai input atau output, menggunakan fungsi pinMode, digitalWrite, dan digitalRead yang beroperasi pada
tegangan 5 volt. Setiap pin dapat memberikan atau menerima maksimum 40 mA dan
memiliki resistor pull-up internal. Selain itu, beberapa pin memiliki fungsi spesial:
1.
Serial: pin 0 (RX) dan 1 (TX) Digunakan untuk menerima (RX) dan mengirimkan(TX) data serial TTL. Pin ini terhubung dengan pin ATmega8U2 USB-to-Serial
TTL.
2.
Eksternal Interupsi: Pin 2 dan 3 dapat dikonfigurasi untuk memicu interrupt pada nilai yang rendah (low value), rising atau falling edge, atau perubahan nilai.3.
PWM: Pin 3, 5, 6, 9, 10, dan 11 Menyediakan 8-bit PWM dengan fungsi analogWrite4.
SPI: pin 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK) mendukung komunikasi SPI dengan menggunakan perpustakaan SPI5.
LED: pin 13. LED terhubung ke pin digital 13. LED akan menyala ketika diberi nilai HIGHArduino Uno memiliki 6 input analog yaitu A0 sampai A5, yang masing-masing
mempunyai resolusi 10 bit. Perubahan tegangan maksimal menggunakan pin AREF.
Ada beberapa pin lainnya yang tertulis di board:
1. AREF. Tegangan referensi untuk input analog. Dapat digunakan dengan fungsi
analogReference.
2. Reset. Menggunakan LOW untuk me-reset mikrokontroler. Digunakan untuk
menambahkan tombol reset.
2.1.7 Komunikasi SPI
[10]Serial Peripheral Interface ( SPI ) merupakan salah satu mode komunikasi serial
membutuhkan 3 jalur yaitu MOSI, MISO, dan SCK. Melalui komunikasi ini data dapat
saling dikirimkan baik antara mikrokontroller maupun antara mikrokontroller dengan
peripheral lain di luar mikrokontroller.
Penjelasan 3 jalur utama dari SPI adalah sebagai berikut :
1. MOSI : Master Output Slave Input Artinya jika dikonfigurasi sebagai master maka
pin MOSI sebagai output tetapi jika dikonfigurasi sebagai slave maka pin MOSI
sebagai input.
2. MISO : Master Input Slave Output Artinya jika dikonfigurasi sebagai master maka
pin MISO sebagai input tetapi jika dikonfigurasi sebagai slave maka pin MISO
sebagai output.
3. CLK : Clock Jika dikonfigurasi sebagai master maka pin CLK berlaku sebagai output
tetapi jika dikonfigurasi sebagai slave maka pin CLK berlaku sebagai input.
Untuk mengatur mode kerja komunikasi SPI ini dilakukan dengan menggunakan
register SPCR (SPI Control Register), SPSR (SPI Status Register) dan SPDR (SPI Data
Register) :
1. SPI Control Register (SPCR) Mode SPCR yang digunakan adalah Bit-6 SPE (SPI
Enable) SPE digunakan untuk mengaktifkan dan menonaktifkan komunikasi SPI
dimana jika SPI bernilai 1 maka komunikasi SPI aktif sedangkan jika bernilai 0 maka
komunikasi SPI tidak aktif. Bit-4 MSTR (Master or Slave Select) MSTR digunakan
untuk mengkonfigurasi sebagai master atau slave secara software dimana jika MSTR
bernilai 1 maka terkonfigurasi sebagai master sedangkan MSTR bernilai 0 maka
terkonfigurasi sebagai slave. Pengaturan bit MSTR ini tidak akan bisa dilakukan jika
pin SS dikonfigurasi sebagai input karena jika pin SS dikonfigurasi sebagai input
maka penentuan master atau slavenya otomatis dilakukan secara hardware yaitu
dengan membaca level tegangan pada SS. Bit-1 SPR1/0 (SPI Clock Rate Select)
SPR1 dan SPR0 digunakan untuk menentukan kecepatan clock yang digunakan
dalam komunikasi SPI.
2. SPI Status Register (SPSR). Dalam SPSR mode pengaturan yang dilakukan adalah
untuk mengetahui bahwa proses pengiriman data 1 byte sudah selesai. Jika proses
pengiriman data sudah selesai maka SPIF akan bernilai satu (high).
3. SPI Data Register (SPDR). SPDR merupakan register yang digunakan untuk
menyimpan data yang akan dikirim atau diterima pada komunikasi SPI.
2.1.8 Arduino Timer
Timer pada arduino uno digunakan pada sistem prototipe ini untuk mencatat
waktu putaran mobil-mobilan. Banyak function dalam arduino menggunakan timer yaitu
delay, delay Microseconds, millis, dan micro s. Penjelasan tentang function dalam
arduino adalah sebagai berikut [11]:
1. Delay
Digunakan untuk tundaan eksekusi baris program selanjutnya dalam millisecond.
2. Delay Mikroseconds
Digunakan untuk tundaan eksekusi baris program selanjutnya dalam microsecond.
3. Millis
Digunakan sebagai pewaktu internal yang akan terus berjalan hingga terjadi overflow
(kembali ke nilai 0) dengan unit dalam millisecond, untuk board arduino uno nilai
micro s akan terus berjalan hingga sekitar 50 hari.
4. Micro s
Digunakan sebagai pewaktu internal akan terus berjalan hingga terjadi overflow
(kembali ke nilai 0) dengan unit dalam microsecond, untuk board arduino uno nilai
millis akan terus berjalan hingga sekitar 70 jam.
Sebuah timer merupakan bagian dari mikrokontroler yang berperan sebagai clock
internal untuk mengukur waktu suatu event. Untuk timer dapat diatur dengan
menggunakan beberapa register khusus. Pada firmware arduino semua timer memiliki
konfigurasi frekuensi 1 kHz dengan enable interrupt. Berikut ini timer khusus untuk
arduino :
1. Timer 0, 8 bit, digunakan untuk function seperti delay, millis, dan micro s, dengan
mengubah konfigurasi Timer 0 akan mempengaruhi function lainnya.
2. Timer 1, 16 bit, biasa digunakan untuk aplikasi terkait motor servo.
2.2
RFID (Radio Frequency Identification)
RFID adalah suatu metode yang mana bisa digunakan untuk menyimpan atau menerima data secara jarak jauh dengan menggunakan suatu piranti yang bernama RFID
tag atau transponder. Suatu RFID tag adalah sebuah benda kecil, misalnya berupa stiker
adesif, dan dapat ditempelkan pada suatu barang atau produk. RFID tag berisi antena
yang memungkinkan mereka untuk menerima dan merespon terhadap suatu sinyal yang
dipancarkan oleh suatu RFID transceiver.
RFID menggunakan reader dan perlengkapan khusus (special RFID devices)
yang dimiliki oleh RFID. RFID menggunakan RF (Gelombang radio/gelombang
elektromagnetik) sinyal untuk memindahkan informasi dari RFID device ke reader.
Banyak kelebihan yang dimiliki sistem RFID dibanding dengan sistem identifikasi
lainnya. Tetapi RFID juga mempunyai kelemahan yaitu jika ada frekuensi lain yang di
tangkap oleh reader RFID maka reader RFID akan merespon frekuensi yang di
tangkapnya.
2.2.1 Komponen Utama Sistem RFID
[1]Secara garis besar sebuah sistem RFID terdiri atas tiga komponen utama, yaitu
tag, reader dan basis data. Secara ringkas, mekanisme kerja yang terjadi dalam sebuah sistem RFID adalah bahwa sebuah reader frekuensi radio melakukan scanning terhadap
data yang tersimpan dalam tag, kemudian mengirimkan informasi tersebut ke sebuah
basis data yang menyimpan data yang terkandung dalam tag tersebut. Gambar 2.4
[image:36.612.75.545.200.690.2]merupakan komponen dari sistem RFID
Sistem RFID merupakan suatu tipe sistem identifikasi otomatis yang bertujuan
untuk memungkinkan data ditransmisikan oleh peralatan portable yang disebut tag, yang
dibaca oleh suatu reader RFID dan diproses menurut kebutuhan dari aplikasi tertentu.
Data yang ditrasmisikan oleh tag dapat menyediakan informasi identifikasi atau lokasi,
atau hal-hal khusus tentang produk-produk bertag, seperti harga, warna, tanggal
pembelian dan lain-lain. Sistem-sistem RFID dapat dikelompokkan menjadi empat
kategori sebagai berikut:
1. Sistem EAS (Electronic Article Surveillance)
Umumnya digunakan pada toko-toko untuk menyensor ada tidaknya suatu item.
Produk-produk diberi tag dan reader berantena besar ditempatkan di masing-masing
pintu keluar toko untuk mendeteksi pengambilan item secara tidak sah.
2. Sistem Portable Data Capture
Menurut penggunaan reader RFID yang portabel yang memungkinkan sistem ini
digunakan dalam seting yang bervariasi.
3. Sistem Networked
Posisi reader yang tetap yang terhubung secara langsung ke suatu sistem manajemen
informasi terpusat, sementara transponder berada pada orang atau item-item yang
dapat dipindahkan.
4. Sistem Positioning
Digunakan untuk identifikasi lokasi item-item atau kendaraan.
Pemilihan frekuensi radio merupakan kunci kerakteristik operasi sistem RFID.
Frekuensi sebagian besar ditentukan oleh kecepatan komunikasi dan jarak baca terhadap
tag. Secara umum tingginya frekuensi mengindikasikan jauhnya jarak baca. Frekuensi yang lebih tinggi mengindikasikan jarak baca yang lebih jauh. Pemilihan tipe frekuensi
juga dapat ditentukan oleh tipe aplikasinya. Aplikasi tertentu lebih cocok untuk salah satu
tipe frekuensi dibandingkan dengan tipe lainnya karena gelombang radio memiliki
perilaku yang berbeda-beda menurut frekuensinya.
Berikut ini adalah empat frekuensi utama yang digunakan oleh sistem RFID :
Beroprasi pada kisaran dari 125 kilohertz (KHz) hingga 134 KHz.Band ini paling
sesuai untuk penggunaan jarak pendek (short-range) seperti sistem antipencurian,
identifikasi hewan dan sistem kunci mobil.
2. Band HF
Beroperasi pada 13.56 megahertz (MHz). Frekuensi ini memungkinkan akurasi yang
lebih baik dalam jarak tiga kaki dan karena itu dapat mereduksi risiko kesalahan
pembacaan tag. Sebagai konsekuensinya band ini lebih cocok untuk pembacaan pada
tingkat item (item-level reading). Tag pasif dengan frekuensi 13.56 MHz dapat dibaca
dengan laju 10 to 100 tag perdetik pada jarak tiga kaki atau kurang. Tag RFID HF
digunakan untuk pelacakan barang-barang di perpustakaan, toko buku, kontrol akses
gedung, pelacakan bagasi pesawat terbang, pelacakan item pakaian.
3. Tag dengan band UHF
Beroperasi di sekitar 900 MHz dan dapat dibaca dari jarak yang lebih jauh dari tag
HF, berkisar dari 3 hingga 15 kaki. Tag ini lebih sensitif terhadap faktor-faktor
lingkungan daripada tag-tag yang beroperasi pada frekuensi lainnya. Band 900 MHz
muncul sebagai band yang lebih disukai untuk aplikasi rantai supply disebabkan laju
dan rentang bacanya. Tag UHF pasif dapat dibaca dengan laju sekitar 100 hingga
1.000 tag perdetik. Tag ini umumnya digunakan pada pelacakan kontainer, truk,
trailer, dan terminal peti kemas.
4. Gelombang Mikro
Tag yang beroperasi pada frekuensi gelombang mikro, biasanya 2.45 dan 5.8 gigahertz (GHz), mengalami lebih banyak pantulan gelombang radio dari
obyek-obyek di dekatnya yang dapat mengganggu kemampuan reader untuk berkomunikasi
dengan tag. Tag RFID gelombang mikro biasanya digunakan untuk manajemen rantai
Tabel 2.3. Tabel Frekuensi RFID yang umum beroprasi[1]
Gelombang Frekuensi Rentang dan Laju baca
LF 125 KHz 1.5 kaki
Kecepatan baca rendah
HF 13.56 MHz 3 kaki
Kecepatan baca sedang
UHF 860-930 MHz 15 kaki
Kecepatan baca tinggi Gelombang Mikro 2.45/5.8 GHz 3 kaki
Kecepatan baca tinggi
2.2.2 Tag/Transponder RFID
[1]Sebuah tag RFID atau transponder, terdiri atas sebuah mikro (microchip) dan
sebuah antena. Chip mikro itu sendiri dapat berukuran sekecil butiran pasir, seukuran 0,4
mm. Chip tersebut menyimpan nomor seri yang unik atau informasi lainnya tergantung
kepada tipe memorinya. Tipe memori itu sendiri dapat read-only, read-write, atau
write-once read-many. Antena yang terpasang pada chip mikro mengirimkan informasi dari chip ke reader. Biasanya rentang pembacaan diindikasikan dengan besarnya antena.
Antena yang lebih besar mengindikasikan rentang pembacaan yang lebih jauh. Tag
tersebut terpasang atau tertanam dalam objek yang akan diidentifikasi. Tag dapat di-scan
dengan reader bergerak maupun stasioner menggunakan gelombang radio.
Tag RFID sangat bervariasi dalam hal bentuk dan ukuran. Sebagian tag mudah ditandai, misalnya tag anti-pencurian yang terbuat dari plastik keras yang dipasang pada
barang-barang di toko. Tag untuk tracking hewan yang ditanam di bawah kulit berukuran
tidak lebih besar dari bagian lancip dari ujung pensil. Bahkan ada tag yang lebih kecil
lagi yang telah dikembangkan untuk ditanam di dalam serat kertas uang. Gambar 2.5
[image:39.612.89.538.105.689.2]merupakan isi dari tag RFID yang terdiri dari mikro dan antena.
Tag RFID terbagi menjadi 3 jenis, yaitu tag pasif, tag aktif, dan tag semi aktif. Pengelempokan ini berdasarkan pada ada tidaknya catu daya pada tag dan
kemampuannya untuk menginisiasi komunikasi dengan reader.
1. Tag Pasif
Tag versi paling sederhana adalah tag pasif, yaitu tag yang tidak memiliki catu daya sendiri serta tidak dapat menginisiasi komunikasi dengan reader. Sebagai
gantinya, tag merespon emisi frekuensi radio dan menurunkan dayanya dari
gelombang energi yang dipancarkan oleh reader.
Sebuah tag pasif minimum mengandung sebuah indentifier unik dari sebuah item
yang dipasangi tag tersebut. Data tambahan tergantung kepada kapasitas
penyimpanannya . Dalam keadaan yang sempurna, sebuah tag dapat dibaca dari jarak
sekitar 10 hingga 20 kaki. Tag pasif dapat beroperasi pada frekuensi rendah (low
frequency, LF), frekuensi tinggi (high frequency, HF), frekuensi ultra tinggi (ultrahigh frequency, UHF), atau gelombang mikro (microwave).
Contoh aplikasi tag pasif adalah pada sistem angkutan massal (Mass Rapid
Transit - MRT), autentikasi masuk gedung dan barang-barang konsumsi . Harga tag pasif lebih murah dibandingkan harga tag versi lainnya. Perkembangan tag murah ini
telah menciptakan revolusi dalam pengadopsian RFID dan memungkinkan
penggunaannya dalam skala yang luas baik oleh organisasi-organisasi pemerintah
maupun industri.
2. Tag Semipasif
Tag semipasif adalah versi tag yang memiliki catu daya sendiri (baterai) tetapi tidak dapat menginisiasi komunikasi dengan reader. Dalam hal ini baterai digunakan
oleh tag sebagai catu daya untuk melakukan fungsi lain seperti pemantauan keadaan
lingkungan dan mencatu bagian elektronik internal tag serta untuk memfasilitasi
penyimpanan informasi. Tag versi ini tidak secara aktif memancarkan sinyal ke
reader. Sebagian tag semipasif tetap dalam keadaan siap (stand by) hingga menerima sinyal dari reader. Tag semipasif dapat dihubungkan dengan sensor untuk
menyimpan informasi pada peralatan keamanan kontainer.
Tag aktif adalah tag yang selain memiliki antena dan chip juga memiliku catu daya dan pemancar serta mengirimkan sinyak kontinyu. Tag versi ini biasanya
memiliki kemampuan baca tulis, dalam hal ini data tag dapat ditulis ulang dan
dimodifikasi. Tag aktif dapat menginisiasi komunikasi dan dapat berkomunikasi pada
jarak yang lebih jauh, hingga 750 kaki, tergantung kepada daya baterainya. Harga tag
ini merupakan yang paling mahal dibandingkan dengan versi lainnya.
Tag RFID memiliki tipe memori yang bervariasi yang meliputi read-only, read/write, dan write-once read-many. Tag read-only memiliki kapasitas memori minimal kurang dari 64 bit dan mengandung data yang terprogram permanen
sehingga tidak dapat diubah. Informasi yang terkandung di dalam tag seperti ini
terutama adalah informasi identifikasi item. Tag dengan tipe memori seperti ini telah
banyak digunakan di perpustakaan dan toko persewaan video. Tag pasif biasanya
memiliki tipe memori seperti ini. Pada tag dengan tipe memori read/write, data dapat
diubah jika diperlukan. Sebagai konsekuensinya kapasitas memorinya lebih besar dan
harganya lebih mahal dibandingkan tag read-only. Tag seperi ini biasanya digunakan
ketika data yang tersimpan didalamnya perlu diubah seiring dengan daur hidup
produk, misalnya di pabrik. Tag dengan tipe memori write-once read-many
memungkinkan informasi disimpan sekali, tetapi tidak membolehkan perubahan
berikutnya terhadap data. Tag tipe ini memiliki fitur keamanan read-only dengan
[image:41.612.74.543.163.674.2]menambahkan fungsionalitas tambahan dari tag read/write. Tabel 2.4 merupakan
tabel karakteristik umum tag RFID.
Tabel 2.4. Karakteristik umum tag RFID[1]
Tag Pasif Tag Semipasif Tag Aktif
Catu Daya Eksternal (dari reader) Baterai Internal Baterai Internal Tipe Memori Read-only Read-write Read-write Rentang Baca Dapat mencapai 20
kaki
Dapat mencapai 100 kaki
Dapat mencapai 750 kaki
Usia Tag Dapat mencapai 20 tahun
2 sampai 7 tahun 5 sampai 10 tahun
Sebuah reader menggunakan antenanya sendiri untuk berkomunikasi dengan tag.
Ketika areader memancarkan gelombang radio, seluruh tag yang dirancang pada
frekuensi tersebut serta berada pada rentang bacanya akan memberikan respon. Sebuah
reader juga dapat berkomunikasi dengan tag tanpa line of sight langsung, tergantung kepada frekuensi radio dan tipe tag (aktif, pasif atau semipasif) yang digunakan.
Reader dapat memproses banyak item sekaligus. Menurut bentuknya, reader dapat berupa reader bergerak seperti peralatan genggam, atau stasioner seperti peralatan
point-of-sale di supermarket. Reader dibedakan berdasarkan kapasitas penyimpanannya, kemampuan pemrosesannya, serta frekuensi yang dapat dibacanya.Basis data merupakan
sebuah sistem informasi logistik pada posisi back-end yang bekerja melacak dan
menyimpan informasi tentang item bertag. Informasi yang tersimpan dalam basis data
dapat terdiri dari identifier item, deskripsi, pembuat, pergerakan dan lokasinya. Tipe
informasi yang disimpan dalam basis data dapat bervariasi tergantung kepada
aplikasinya. Sebagai contoh, data yang disimpan pada sistem pembayaran tol akan
berbeda dengan yang disimpan pada rantai supply.
Basis data juga dapat dihubungkan dengan jaringan lainnya seperti local area network (LAN) yang dapat menghubungkan basis data ke Internet. Konektivitas seperti ini memungkinkan sharing data tidak hanya pada lingkup basis data lokal. Gambar 2.6
[image:42.612.82.542.199.601.2]merupakan gambar dari reader RFID.
Gambar 2.6. Reader RFID[1]
2.2.4 RFID
Reader RC522
modul RFID ini adalah tag jenis pasif. RFID reader RC522 memiliki rantang baca
[image:43.612.97.541.81.630.2]kurang lebih 3 kaki. Gambar 2.7 merupakan gambar dari RFID reader RC522.
Gambar 2.7. Tampilan RFID reader RC522[3]
Mifare RC522 RFID Reader Module adalah sebuah modul berbasis IC Philips
MFRC522 yang dapat membaca RFID dengan penggunaan yang mudah dan harga yang
murah, karena modul ini sudah berisi komponen-komponen yang diperlukanmoleh
MFRC522 untuk dapat bekerja.[3]
Modul ini dapat digunakan langsung oleh MCU dengan menggunakan interface
SPI, dengan suplai tegangan sebesar 3,3. MFRC522 merupakan produk dari NXP yang
menggunakan frekuensi 13.56MHz. MFRC522 support dengan semua varian MIFARE
Mini, MIFARE 1K, MIFARE 4K, MIFARE Ultralight, MIFARE DESFire EV1 dan
MIFARE Plus RF identification rotocols.[3].
Dalam hal kecepatan baca, RFID reader mampu membaca data dari kartu sebesar
16 byte dalam waktu rata-rata selama 9.5 ms, untuk kecepatan tulis didapatkan waktu
rata-rata selama 10 ms. Sementara dalam hal kecepatan transfer data dari Arduino ke
database, waktu rata-rata pengiriman adalah sebesar 7 ms. Hal ini menunjukkan, bahwa
sistem yang dibuat mampu mengirimkan data secara cepat dan tepat. Tabel 2.5
merupakan table konfigurasi pin pada RFID reader RC522[13]. Gambar 2.8 merupakan
Gambar 2.8. Data Sheet MFRC522[12]
Tabel 2.5. Konfigurasi Pin RFID reader RC522[4]
Pins SPI UNO Mega2560 Leonardo/Due
1 SDA (SS) 10 53 10
2 SCK 13 52 SCK1
3 MOSI 11 51 MOSI1
4 MISO 12 50 MISO1
5 IRQ * * *
6 GND GND GND GND
7 RST 5 - Reset
8 +3.3V 3V3 3V3 3.3V
2.3 LCD (Liquid Crystal Display)
[5]LCD ini digunakan sebagai penampil hasil pada sistem prototipe penghitungan laju
menggunakan RFID berbasis arduino. LCD akan menampilkan kecepatan dari
mobil-mobilan yang bergerak pada lintasanya.
menampilkan numerik (digunakan dalam jam tangan, kalkulator dll) dan menampilkan teks
alfanumerik (sering digunakan pada mesin foto kopi dan telepon genggam).
Dalam menampilkan numerik ini kristal yang dibentuk menjadi bar, dan dalam
menampilkan alfanumerik kristal hanya diatur kedalam pola titik. Setiap kristal memiliki
sambungan listrik individu sehingga dapat dikontrol secara independen. Ketika kristal off'
(tidak ada arus yang melalui kristal) cahaya kristal terlihat sama dengan bahan latar
belakangnya, sehingga kristal tidak dapat terlihat. Namun ketika arus listrik melewati kristal,
itu akan merubah bentuk dan menyerap lebih banyak cahaya. Hal ini membuat kristal
terlihat lebih gelap dari penglihatan mata manusia sehingga bentuk titik atau bar dapat
dilihat dari perbedaan latar belakang.
Sangat penting untuk menyadari perbedaan antara layar LCD dan layar LED. Sebuah
LED display (sering digunakan dalam radio jam) terdiri dari sejumlah LED yang
benar-benar mengeluarkan cahaya (dan dapat dilihat dalam gelap). Sebuah layar LCD hanya
mencerminkan cahaya, sehingga tidak dapat dilihat dalam gelap.Gambar 2.9 merupakan
tampilan dari LCD dan tabel 2.9 merupakan tabel pin dari LCD.
Tabel 2.6. Tabel Pin LCD[5] PIN Keterangan
1 Vss
2 Vcc
3 Vee
4 Rs
5 R/W
6 E
7 DB0
8 DB1
9 DB2
10 DB3
11 DB4
12 DB5
13 DB6
14 DB7
15 LED+
16 LED-
Untuk keperluan antar muka suatu komponen elektronika dengan mikrokontroler,
perlu diketahui fungsi dari setiap kaki yang ada pada komponen tersebut. Penjelasan kaki
yang ada pada LCD adalah sebagai berikut :
a. Kaki 1 (GND) : Kaki ini berhubungan dengan tegangan +5 Volt yang merupakan
tegangan untuk sumber daya.
b. Kaki 2 (VCC) : Kaki ini berhubungan dengan tegangan 0 volt (Ground).
c. Kaki 3 (VEE/VLCD) : Tegangan pengatur kontras LCD, kaki ini terhubung pada
cermet. Kontras mencapai nilai maksimum pada saat kondisi kaki ini pada
tegangan 0 volt.
d. Kaki 4 (RS) : Register Select, kaki pemilih register yang akan diakses. Untuk akses
ke Register Data, logika dari kaki ini adalah 1 dan untuk akses ke Register Perintah,
e. Kaki 5 (R/W) : Logika 1 pada kaki ini menunjukan bahwa modul LCD sedang pada
mode pembacaan dan logika 0 menunjukan bahwa modul LCD sedang pada mode
penulisan. Untuk aplikasi yang tidak memerlukan pembacaan data pada modul
LCD, kaki ini dapat dihubungkan langsung ke Ground.
f. Kaki 6 (E) : Enable Clock LCD, kaki mengaktifkan clock LCD. Logika 1 pada kaki
ini diberikan pada saat penulisan atau membacaan data.
g. Kaki 7 – 14 (D0 – D7) : Data bus, kedelapan kaki LCD ini adalah bagian di mana aliran data sebanyak 4 bit ataupun 8 bit mengalir saat proses penulisan maupun
pembacaan data.
h. Kaki 15 (Anoda) : Berfungsi untuk tegangan positif dari backlight LCD sekitar 4,5
volt (hanya terdapat untuk LCD yang memiliki backlight)
i. Kaki 16 (Katoda) : Tegangan negatif backlight LCD sebesar 0 volt (hanya terdapat
pada LCD yang memiliki backlight).
2.4
Tombol Push Button
[6]Tombol tekan (Push Button) adalah bentuk saklar yang paling umum dari
pengendali manual yang dijumpai di industri. Tombol tekan NO (Normally Open)
menyambung rangkaian ketika tombol ditekan dan kembali pada posisi terputus ketika
tombol dilepas. Tombol tekan NC (Normally Closed) akan memutus rangkaian apabila
tombol ditekan dan kembali pada posisi terhubung ketika tombol dilepaskan.
Ada juga tombol tekan yang memiliki fungsi ganda, yakni sudah dilengkapi oleh
dua jenis kontak, baik NO maupun NC. Jadi tombol tekan tersebut dapat difungsikan
sebagai NO, NC atau keduanya. Ketika tombol ditekan, terdapat kontak yang terputus
(NC) dan ada juga kontak yang terhubung (NO). Gambar 2.10 merupakan tampilan dari
Gambar 2.10. Tombol Tekan[6]
2.4.1 Prinsip Kerja Tombol Push Button
Ilustrasi prinsip kerja tombol tekan dapat dilihat pada gambar 2.11. Pada gambar
(a) tersebut diperlihatkan posisi tombol dalam keadaan belum di sentuh. Gambar (b)
menunjukkan tombol tekan sedang ditekan dan gambar (c) saat tekanan pada tombol
telah dilepaskan.
Perbedaan fungsi masing-masing kontak dilihat dari hidup dan matinya lampu
(lampu R dan G) secara bergantian. Dalam prakteknya tombol tekan difungsikan sebagai
tombol untuk menjalankan rangkaian kontrol (START) dan mematikan rangkaian kontrol
(STOP).Gambar 2.11 merupakan gambaran dari prinsip kerja tombol push button dan
Gambar 2.12 merupakan simbol dari tombol push button.
Gambar 2.12. Simbol Tombol Push Button[6]
2.4.2 Resistor Pull Up dan Pull Down
[9]1. Resistor Pull Up
Rangkaian menggunakan resistor pull up yang diletakan dekat dengan Vcc.
Bersifat aktif rendah yang berarti jika dalam keadaan normal akan bersifat high.
Gambar 2.13 merupakan gambar rangkaian resistor pull up :
Gambar 2.13. Rangkaian Resistor Pull Up[9]
Rangkaian menggunakan resistor pull down yang diletakan dekat dengan Ground.
Bersifat aktif tinggi yang berarti jika dalam keadaan normal akan bersifat low .Gambar
[image:50.612.77.545.154.618.2]2.14 merupakan gambar rangkaian resistor pull down :
Gambar 2.14. Rangkaian Resistor Pull Down[9]
2.5
Sensor Photodioda
[7]Sensor photodioda merupakan dioda yang peka terhadap cahaya, sensor
photodioda akan mengalami pembocoran arus pada saat menerima intensitas cahaya dan
akan mengalirkan arus listrik secara forward sebagaimana dioda pada umumnya. Sensor
photodioda adalah salah satu jenis sensor peka cahaya (photodetector). Jenis sensor peka
cahaya lain yang sering digunakan adalah phototransistor. Photodioda akan mengalirkan
arus yang membentuk fungsi linear terhadap intensitas cahaya yang diterima. Arus ini
umumnya teratur terhadap power density (Dp). Perbandingan antara arus keluaran dengan
power density disebut sebagai current responsitivity. Arus yang dimaksud adalah arus
bocor ketika photodioda tersebut disinari dan dalam keadaan dipanjar mundur.
Tanggapan frekuensi sensor photodioda tidak luas. Dari rentan tanggapan itu,
sensor photodioda memiliki tanggapan paling baik terhadap cahaya infra merah, tepatnya
pada cahaya dengan panjang gelombang sekitar 900 nm. Sebagai contoh aplikasi
photodioda dapat digunakan sebagai sensor api. Pengguna sensor photodioda sebagai
pendeteksi keberadaan api. Didasarkan pada fakta bahwa pada nyala api juga terpancar
infra merah meupakan cahaya tidak tampak. Keberadaan cahaya infra merah dapat
dirasakan yaitu ketika ada rasa hangat atau panas dari nyala api yang sampai ke tubuh
kita. Gambar 2.15 Merupakan bentuk dari photodioda
Gambar 2.15. Tampilan sensor photodioda[7]
2.6
Kecepatan
[8]Kelajuan adalah besar kecepatan. Kecepatan adalah kelajuan yang arah geraknya
dinyatakan. Dalam fisika kelajuan dan kecepatan mempunyai arti yang berbeda. Sering
terjadi kesalahan umum tentang kelajuan dan kecepatan. Misalkan mobil bergerak
70km/jam, maka dikatakan mobil bergerak dengan kelajuan 70km/jam bukan
kecepatannya. Kelajuan termasuk besaran skalar karena tidak bergantung pada arahnya.
Sehingga kelajuan selalu bernilai positif. Alat yang digunakan untuk mgnukur kelajuan
adalah spidometer.
Cara menentukan seberapa cepat kedudukan telah berubah yaitu dengan
mempelajari kecepatan. Misalkan seseorang berlari 10 m/s ke arah barat. Dari pernyataan
tersebut dapat ditarik kesimpulan bahwa kelajuan pelari tersebut 10 m/s, sedangkan
kecepatannya adalah 10 m/s ke arah barat. Kecepatan termasuk besaran vektor karena
bergantung pada arahnya. Dengan kata lain kecepatan adalah perpindahan selama selang
dinyatakan dengan s dan waktu tempuh dinyatakan dengan t secara matematis
dirumuskan :
V = S/t (2.1)
Keterangan :
V = Kecepatan,kelajuan (m/s)
S = Perpindahan,jarak (m)
t = Waktu tempuh (s)
Kecepatan dan kelajuan hanya dibedakan oleh arahnya saja, sehingga keduanya
mempunyai satuan yang sama yaitu m/s.
2.6.1
Kecepatan Rata-Rata
Kecepatan rata-rata adalah hasil bagi perpindahan dan selang waktu. Gambar 2.16
merupakan perpindahan benda A menuju benda B.
Gambar 2.16. Kedudukan awal benda A berpindah ke B[8]
Dari gambar 2.16 di atas perpindahan Δx (delta x) ditempuh dalam selang waktu
Δt (delta t), maka kecepatan rata-rata V dirumuskan :
V = Δx / Δt (2.2) Keterangan :
V = Kecepatan rata-rata (m/s)
Δx = Selisih perpindahan (m) = x2 – x1
32
BAB III
RANCANGAN PENELITIAN
3.1.
Perancangan Sistem Secara Keseluruhan
Gambar 3.1 Diagram Blok Sistem
Gambar 3.1 merupakan gambar dari diagram blok sistem yang memuat cara kerja
secara keseluruhan. Sistem ini terdiri dari beberapa bagian yaitu :
1. Reader RFID
Reader RFID berfungsi untuk mendeteksi keberadaan mobil-mobilan. 2. Mikrokontroler
Mikrokontroler arduinouno ATmega 328 berfungsi untuk memproses sistem kerja
alat.
3. LCD
LCD digunakan untuk penampil.
4. Tombol Push Button
Tombol digunakan sebagai inputan jarak 1m – 4m dan mereset hitungan. 5. Sensor Photodioda
Sensor photodioda digunakan untuk memulai kerja sistem dan Tombol reset
digunakan untuk mereset hasil hitungan yang ditampilkan pada LCD. Setelah
sensor photodioda aktif maka sensor memberikan sinyal inputan ke mikrokontroler
dan sistem akan berjalan, mobil-mobilan akan bergerak menuju reader RFID.
Reader RFID akan mendeteksi tag RFID yang terpasang pada mobil-mobilan dan Tombol
Sensor Photodioda
Reader RFID
MIKROKONTROLER
Arduino Uno
menghentikan perhitungan waktu yang dilakukan oleh mikrokontroler. Setelah
reader RFID mendeteksi tag RFID maka reader RFID memberikan sinyal ke mikrokontroler untuk berhenti menghitung dan mulai meproses hasil hitungan.
Setelah hasil proses hitungan selesai maka hasil hitungan di tampilkan pada LCD.
3.2.
Perancangan Hardware
3.2.1
Perancangan Regulator 5V
Rangkaian Voltage Regulator ini banyak ditemukan pada adaptor yang bertugas
untuk memberikan tegangan DC untuk laptop, handphone, dan lain sebagainya. Pada
sistem ini regulator digunakan sebagai sumber tegangan atau catu daya arduino uno
ATmega 328.Arduino uno ini memerlukan sumber tegangan antara 7V-12V DC dan 5V
DC untuk USB konektor. Gambar 3.2 merupakan rangkaian dari regulator 5V DC.
Gambar 3.2.Rangkaian Regulator
Trafo pada rangkaian regulator digunakan sebagai penurun tegangan dari 220V
AC menjadi 15V AC dan arus sebesar 1A. Dioda bridge pada rangkaian berfungsi agar
menyearahkan tegangan AC sehingga diperoleh keluaran tegangan DC.Capasitor C1
digunakan untuk menghilangkan riplple AC yang masih terdapat pada keluaran dari
dioda bridge. IC 7805 berfungsi untuk menghasilkan keluaran tegangan 5V DC.
Capasitor C2 berfungsi sama dengan capasitor C1 yaitu menghilangkan ripple pada
Cara kerja regulator tersebut yaitu tegangan AC 220 V dari PLN diturunkan
tegangannya oleh trafo. Pada rangkaian diatas tegangan diturunkan menjadi 9 Volt AC.
Tegangn 9 V AC ini kemudian disearahkan dengan Rangkaian Dioda Bridge menjadi
tegangan searah 9 Volt DC. Tegangan DC yang dihasilkan belum benar-benar DC,
masih terdapat ripple AC dengan frekuensi sesuai input dari PLN sekitar 50-60 Hz.
Maka digunakan 2 buah capasitor yang berfungsi memfilter dan memperkecil ripple AC
sehingga makin mendekati grafik tegangan DC. Capasitor yang digunakan
masing-masing bernilai 1000uF.
Setelah itu tegangan melewati IC 7805 dan dirubah menjadi tegangan DC 5V.
Ripple AC yang masih ada di filter kembali melalui C2. Maka dari tegangan AC 220V
dari PLN bisa diubah menjadi tegangan DC 5V oleh rangkaian ini
3.2.2
Pin-pin Yang Digunakan Pada Penelitian
Tabel.3.1 Tabel Penggunaan Pin Aduino UNO
Pin Keterangan 3 LCD (D7)
4 LCD (D6) 5 LCD (D5) 6 LCD (D4) 7 LCD (E) 8 LCD (RS) 9 RFID (Reset) 10 RFID (SDA) 11 RFID (MOSI) 12 RFID (MISO) 13 RFID (SCK) A0 Sensor Photodioda A1 Tombol Jarak 1M A2 Tombol Jarak 2M A3 Tombol Jarak 3M A4 Tombol Jarak 4M Reset Tombol Reset
5V Vin LCD (VDD) 3.3V Vin RFID
![Gambar 2.3. Pin Mikrokontroler ATmega 328[2]](https://thumb-ap.123doks.com/thumbv2/123dok/930213.599934/30.612.93.544.178.584/gambar-pin-mikrokontroler-atmega.webp)
![Gambar 2.4. Komponen Utama RFID[1]](https://thumb-ap.123doks.com/thumbv2/123dok/930213.599934/36.612.75.545.200.690/gambar-komponen-utama-rfid.webp)
![Gambar 2.5. Komponen tag RFID[1]](https://thumb-ap.123doks.com/thumbv2/123dok/930213.599934/39.612.89.538.105.689/gambar-komponen-tag-rfid.webp)
![Gambar 2.6. Reader RFID[1]](https://thumb-ap.123doks.com/thumbv2/123dok/930213.599934/42.612.82.542.199.601/gambar-reader-rfid.webp)
![Gambar 2.7. Tampilan RFID reader RC522[3]](https://thumb-ap.123doks.com/thumbv2/123dok/930213.599934/43.612.97.541.81.630/gambar-tampilan-rfid-reader-rc.webp)
![Gambar 2.8. Data Sheet MFRC522[12]](https://thumb-ap.123doks.com/thumbv2/123dok/930213.599934/44.612.72.531.73.606/gambar-data-sheet-mfrc.webp)
![Gambar 2.14. Rangkaian Resistor Pull Down[9]](https://thumb-ap.123doks.com/thumbv2/123dok/930213.599934/50.612.77.545.154.618/gambar-rangkaian-resistor-pull-down.webp)