BAB IV
PENGUJIAN DAN ANALISA
Pada bab ini akan dijelaskan mengenai pengujian algoritma dan pengukuran pada keluaran dari robot yang telah dibuat dan Analisa tentang kinerja algoritma.
4.1. Contoh Perhitungan
Karena semua perhitungan terjadi dalam algoritma pada kontroler maka proses perhitungan tidak terlihat, maka berikut adalah contoh perhitungan kinematika balik.Berikut akan dibahas contoh kasus pada perhitungan kinematika balik. Pertama yang harus diketahui adalah sebagai berikut :
Diketahui :
Koordinat tujuan End-effector = (7cm, 6cm)
Z = 0,5cm
x = 7cm
y= 6cm
frame = 6,75cm
Dari koordinatend-effector tersebut nantinya akan didapat besar sudut untuk masing-masing servo.
Dijawab :
Gambar 4.1 Perhitungan Pertama
Untuk perhitungan tahap pertama nilai yang akan dicari adalah nilai R1 dan
1. Untuk mencari nilai R1 dan 1 nilai-nilai yang dibutuhkan adalah nilai koordinat
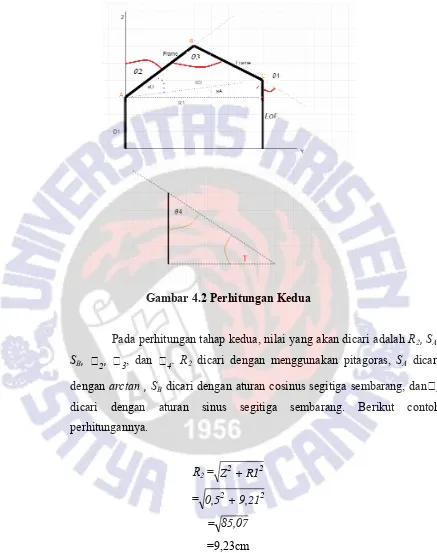
Gambar 4.2 Perhitungan Kedua
Pada perhitungan tahap kedua, nilai yang akan dicari adalah R2, SA,
SB, 2, 3, dan 4. R2 dicari dengan menggunakan pitagoras, SA dicari
dengan arctan , SB dicari dengan aturan cosinus segitiga sembarang, dan3
dicari dengan aturan sinus segitiga sembarang. Berikut contoh perhitungannya.
R2 = Z2+ R12
= 0,52+ 9,212
= 85,07
3 = sin-1
(
Maka dari posisi end-effector didapat besar masing-masing sudut yaitu 1=
,2 = , 3 = ,dan 4 = .
49,39o 40,05o 86,18o 46,13o
4.2. Pengujian dan Pengukuran
Pengujian dilakukan untuk melihat hasil dari algoritma apakah sudah sesuai dengan konfigurasi, dan keluaran robot sudah berhasil sesuai dengan hasil yang diharapkan. Berhasil disini berarti bahwa hasil pergerakan robot sudah sesuai dengan masukan koordinat yang diberikan.
Pengujian dilakukan dalam 4 tahap. Tahap pertama adalah pengujian masing servo tanpa beban. Tahap kedua adalah melakukan pengujian servo saat servo sudah terpasang sesuai konfigurasi. Tahap ketiga adalah pengujian kinematika balik dengan masukan 1 koordinat. Tahap keempat adalah pengujian kinematika balik dengan masukan koordinat lebih dari 1. Alat ukur yang digunakan dalam pengukuran adalah penggaris dan busur derajat.
Gambar 4.3 Penggaris
Gambar 4.4 Busur Derajat
Base-frame robot berada pada bagian bawah robot, yaitu pada servo 0 sedangkan end-effector robot berada pada bagian servo terakhir, yaitu servo 3.
4.6ditunjukkan sudut yang dibentuk antara titik acuan 0 servo dan titik penanda sudut pada servo dynamixel AX-12A.
Gambar 4.5 Titik Referensi Pada Servo
Gambar 4.6 Sudut Yang Terbentuk
4.2.1 Pengujian Servo Tanpa Beban
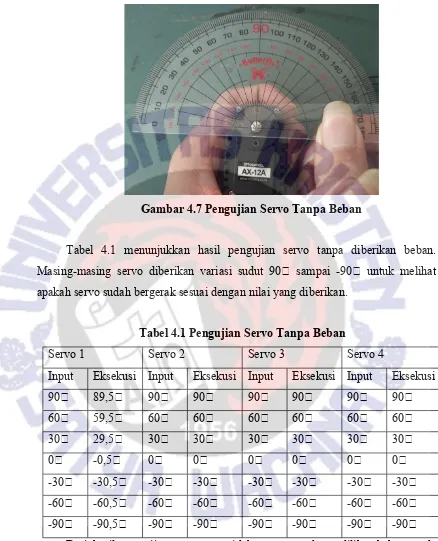
Gambar 4.7 Pengujian Servo Tanpa Beban
Tabel 4.1 menunjukkan hasil pengujian servo tanpa diberikan beban. Masing-masing servo diberikan variasi sudut 90 sampai -90 untuk melihat apakah servo sudah bergerak sesuai dengan nilai yang diberikan.
Tabel 4.1 Pengujian Servo Tanpa Beban
Servo 1 Servo 2 Servo 3 Servo 4
Input Eksekusi Input Eksekusi Input Eksekusi Input Eksekusi
90 89,5 90 90 90 90 90 90
60 59,5 60 60 60 60 60 60
30 29,5 30 30 30 30 30 30
0 -0,5 0 0 0 0 0 0
-30 -30,5 -30 -30 -30 -30 -30 -30
-60 -60,5 -60 -60 -60 -60 -60 -60
-90 -90,5 -90 -90 -90 -90 -90 -90
Dari hasil pengujian saat servo tidak terpasang dapat dilihat bahwa pada servo 1 terdapat ralat sebesar 0,5.
Berikut adalah pengujian perputaran pada servo saat terpasangframe. Pengujian ini dilakukan untuk melihat perputaran servo sudah benar sesuai dengan nilai sudut yang diberikan.
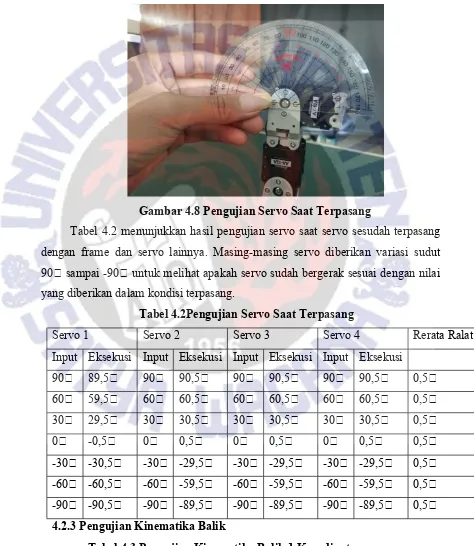
Gambar 4.8 Pengujian Servo Saat Terpasang
Tabel 4.2 menunjukkan hasil pengujian servo saat servo sesudah terpasang dengan frame dan servo lainnya. Masing-masing servo diberikan variasi sudut 90 sampai -90 untuk melihat apakah servo sudah bergerak sesuai dengan nilai yang diberikan dalam kondisi terpasang.
Tabel 4.2Pengujian Servo Saat Terpasang
Servo 1 Servo 2 Servo 3 Servo 4 Rerata Ralat
Input Eksekusi Input Eksekusi Input Eksekusi Input Eksekusi
90 89,5 90 90,5 90 90,5 90 90,5 0,5
60 59,5 60 60,5 60 60,5 60 60,5 0,5
30 29,5 30 30,5 30 30,5 30 30,5 0,5
0 -0,5 0 0,5 0 0,5 0 0,5 0,5
-30 -30,5 -30 -29,5 -30 -29,5 -30 -29,5 0,5
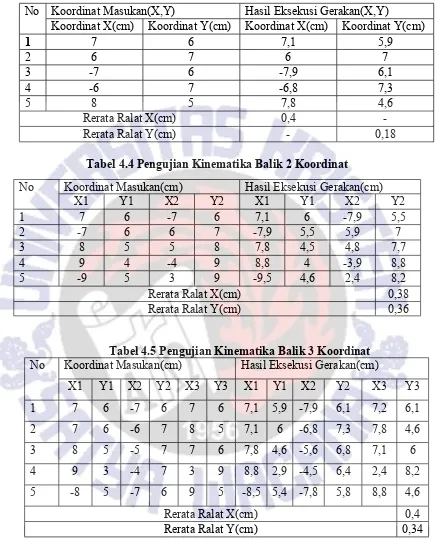
Koordinat Masukan(X,Y) Hasil Eksekusi Gerakan(X,Y) No
Koordinat X(cm) Koordinat Y(cm) Koordinat X(cm) Koordinat Y(cm)
1 7 6 7,1 5,9
2 6 7 6 7
3 -7 6 -7,9 6,1
4 -6 7 -6,8 7,3
5 8 5 7,8 4,6
Rerata Ralat X(cm) 0,4
-Rerata Ralat Y(cm) - 0,18
Tabel 4.4 Pengujian Kinematika Balik 2 Koordinat
Tabel 4.5 Pengujian Kinematika Balik 3 Koordinat Koordinat Masukan(cm) Hasil Eksekusi Gerakan(cm) No
Hasil pengujian koordinat sedikit berbeda dengan koordinat yang diberikan, hal ini dapat dikarenakan oleh beberapa alasan sebagai berikut :
1. Penggunaan busur derajat yang berskala 10osehingga ketelitian saat
pengujian kurang akurat.
2. Pengujian servo tanpa menggunakan beban yang memperlihatkan bahwa ada servo yang memiliki ralat sehingga saat diberi masukan koordinat juga terjadi ralat
3. Pengujian saat servo terpasang satu sama lain memperlihatkan bahwa servo terbebani dengan servo lain sehingga terdapat ralat dalam pengujian saat servo terpasang