DESAIN DAN IMPLEMENTASI SIX-STEP COMUTATION PADA SISTEM KONTROL MOTOR BLDC 1,5 kW
Sutedjo1), Ony Asrarul Qudsi2), Suhariningsih3),dan Diah Septi Yanaratri4)
1,2,3,4
Teknik Elektro Industri, Politeknik Elektronika Negeri Surabaya, Jl. Raya ITS - Kampus PENS Sukolilo, Surabaya, 60111
E-mail: [email protected], [email protected], nuning @pens.ac.id3, [email protected]
ABSTRACT
This paper presents details design of 3 phase inverter for speed control BLDC motor. BLDC motors are included in synchronous motors with permanent magnets, so this motor is equipped with a efect sensor to detect the rotor position. With the data from hall-efect, the inverter can supply the electrical energy into the motor under synchronous conditions. In this study used a VSI for setting BLDC motor speed. Output setting of 3 phase inverter using the six-step comutation method because this method is simple and easy to implement. Output setting of the inverter using the six-step method will produce PWM output wave in square with a 120° commutation. Duty cycle setting on the PWM signal will change the inverter output, so will affect the speed of the BLDC motor. This concept is implemented using ARM STM32F407VGT6 microcontroller. Then open-loop testing is done by variying duty cycle value from 0% to 95% so that the speed response will change. While close-loop testing is done by providing motor speed feedback to the microcontroller to provide duty cycle response which setting automatically according to the specified speed setpoint. Based on the results obtained, the method motor speed control of BLDC is able to provide a speed response in accordance with the setpoint value specified.
Keywords: BLDC Motor, Inverter, Six-step comutation
ABSTRAK
Makalah ini menyajikan detail desain dari inverter 3 fasa untuk pengaturan kecepatan motor BLDC. Motor BLDC termasuk dalam motor sinkron dengan permanen magnet, sehingga motor jenis ini dilengkapi dengan sensor hall-efect untuk mendeteksi posisi rotor. Dengan data posisi rotor dari hall-efect, maka inverter dapat mensuplai energi listrik kedalam motor pada kondisi sinkron. Pada penelitian ini digunakan sebuah VSI (Voltage Source Inverter) untuk pengaturan kecepatan motor BLDC. Pengaturan tegangan output inverter 3 fasa menggunakan metode six-step comutation karena metode ini cukup sederhana dan mudah untuk diimplementasikan. Pengaturan tegangan output inverter menggunakan metode six-step akan menghasilkan gelombang keluaran PWM (Pulse Width Modulation) yang berbentuk kotak dengan komutasi sebesar 120°. Pengaturan duty cycle pada sinyal PWM akan mengubah nilai output dari inverter, sehingga akan berpengaruh pada kecepatan motor BLDC. Konsep ini diimplementasikan menggunakan microcontroller ARM STM32F407VGT6. Kemudian pengujian open-loop dilakukan dengan memvariasikan nilai duty cycle dari 0% hingga 95% sehingga didapat nilai respon kecepatan terhadap perubahan duty cycle. Sedangakan pengujian close-loop dilakukan dengan memberikan umpan balik kecepatan motor kepada microcontroller sehingga memberikan respon pada pengaturan duty cycle secara otomatis sesuai dengan setpoint kecepatan yang ditentukan. Berdasarkan hasil yang telah diperoleh, metode pengaturan kecepatan motor BLDC dengan metode yang diusulkan mampu memberikan respon kecepatan sesuai dengan nilai setpoint yang ditentukan.
TE-‐262 PENDAHULUAN
Motor BLDC saat ini telah banyak digunakan karena motor ini memiliki
performa yang baik, kecepatan tinggi, responsif, handal dan lebih efisien. Karena
kelebihannya tersebut maka motor BLDC sering digunakan di industri-industri,
penggerak kendaraan listrik dan lain sebagainya. Motor BLDC merupakan motor listrik
synchronous AC tiga fasa. Perbedaan pemberian nama ini terjadi karena motor BLDC
memiliki back EMF (BEMF) yang berbentuk trapezoid sedangkan BLAC memiliki
BEMF berbentuk sinusoidal. Meskipun demikian keduanya memiliki struktur yang
sama. Jika dibandingkan dengan motor DC, MOTOR motor BLDC memiliki biaya
perawatan yang lebih rendah dan kecepatan yang lebih tinggi karna motor jenis ini tidak
menggunakan brush. Sedangkan jika dibandingkan dengan motor induksi, motor BLDC
torsi awal yang lebih tinggi karena rotor terbuat dari magnet permanen. Akan tetapi,
pengendalian motor BLDC jauh lebih rumit untuk kecepatan dan torsi yang konstan
karena tidak adanya brush yang menunjang proses komutasi.
Six-step comutation adalah metode pengaturan motor BLDC yang umum
digunakan. Karena metode ini sederhana dan mudah untuk diimplementasikan.
Dikatakan six step karena pada satu periode gelombang tebagi menjadi 6 bagian yaitu 2
bagian positif (+), 2 bagian float (0), dan 2 bagian negatif. Gelombang ini digunakan
untuk proses komutasi pada motor. Pada penelitian ini, metode six-step comutation akan
diterapkan pada inverter 3 fasa sebagai Power Electronic Convertion (PEC). Metode
ini akan menjalankan proses switching driver mosfet inverter. Pengaturan kecepatan
dapat dilakukan dengan menguba nilai duty cycle PWM (Pulse Width Modulation) yang
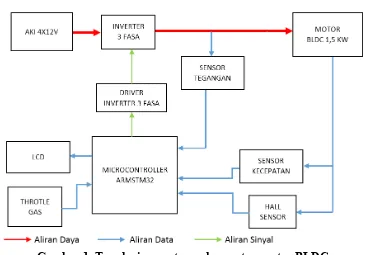
berbentuk trapezoidal. Topologi pengaturan kecepatan motor BLDC yang diusulkan
dapat dilihat pada gambar 1.
Pada gambar 1, metode six-step comutation akan diimplemntasikan dan diuji
coba pada motor BLDC 1,5 kW dengan pengaturan open-loop dan close-loop. Pada
pengujian open-loop sangat memungkinkan motor BLDC dapat dikontrol secara
manual. Sedangkan pada pengujian close-loop motor akan diuji coba pada nilai (set
point) kecepatan tertentu sehingga motor dapat berada pada kecepatan konstan sesuai
dengan nilai setpoint secara adaptif.
Gambar 1. Topologi pengaturan kecepatan motor BLDC
Dengan dua pengujian ini performa metode kontrol yang diusulkan dapat
memberikan gambaran mengenai konsep dan implementasi pengaturan kecepatan motor
BLDC.
SIX-STEP COMUTATION INVERTER
Acuan untuk mendesain inverter 3 fasa adalah spesifikasi dari motor yang
digunakan, sehingga rangkaian inverter 3 fasa dirancang dengan daya minimal sebesar
1500 W. Dalam perencanaannya, tegangan masukan inverter diatur dengan
menggunakan duty cycle PWM mulai dari 0% sampai 80% dengan frekuensi konstan.
Pada rangkaian inverter 3 fasa, terdapat 2 jenis frekuensi kerja yaitu frekuensi switching
dan frekuensi pencacahan. Frekuensi switching adalah frekuensi keluaran tiap fasa.
Sedangkan frekuensi pencacahan adalah frekuensi yang bekerja pada MOSFET untuk
mencacah gelombang sehingga dapat diatur agar memiliki keluaran yang sesuai dengan
yang diharapkan. Frekuensi switching diatur bekerja konstan pada frekuensi 30 Hz dan
frekuensi pencacahan pada 100 kHz.
1. Perhitungan daya inverter 3 fasa dengan efisiensi 80% dirumuskan menggunakan
persamaan (1).
𝜂 = !!"#
!!"
TE-‐264 keterangan:
𝜂 :Efisiensi.
Pout :Daya keluaran. Pin :Daya masukan.
Dengan mengasumsikan efiiensi dari inverter 80% maka, daya maksimal yang inverter
3 fasa adalah 1875 Watt.
2. Perhitungan arus nominal untuk menentukan tipe MOSFET
Menghitung arus nominal bibutuhkan agar pemilihan komponen sesuai dengan
kebutuhan perencanaan. Perhitungan yang digunakan menggunakan persamaan (2).
𝐼!"#"$ =
!!"#"$
!!"#"$
(2)
=!"##!"
=31,25 𝐴 keterangan:
Imotor : Arus yang dibutuhkan motor.
Pmotor : Daya yang dibutuhkan motor.
Vmotor : Tegangan yang dibutuhkan motor.
Dari perhitungan ini didapatkan arus nominal yang akan mengalir melalui
MOSFET adalah sebesar 31,25 A sehingga MOSFET harus mampu menahan arus
minimal sesuai dengan perhitungan. Jenis MOSFET yang memiliki parameter arus di
atas 31,25 A adalah tipe IRFP150N dengan kemampuan arus sebesar 42 A dan tegangan
sebesar 100 V.
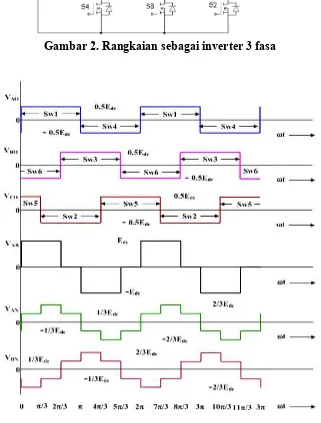
Pengaturan inverter 3 fasa yang diusulkan pada penelitian ini menggunakan
PWM keluaran sinyal persegi (square) dengan komutasi sebesar 120°. Penyusunan
rangkaian sebagai inverter 3 fasa dapat dilihat pada Gambar 2. Pengaturan dengan
komutasi 120° dapat diartikan bahwa dalam 360°, setiap sakelar akan ON selama 120°
dan akan OFF selama 240°. Bentuk komutasi dalam skala waktu dapat dilihat pada
gambar 3.
Gambar 2. Rangkaian sebagai inverter 3 fasa
Gambar 3. Bentuk komutasi dalam skala waktu
Untuk membentuk keluaran gelombang komutasi 120° diatur melalui
microcontroller. Pengaturan dapat dilakukan dengan menggunakan sensor untuk
menentukan kapan sakelar harus ON atau OFF, untuk motor BLDC digunakan 3 buah
hall sensor sebagai penentu waktu kerja sakelar. Kombinasi penyaklaran dapat dilihat
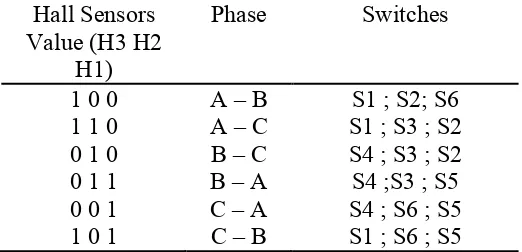
TE-‐266 Tabel 1.
Pengaturan Sakelar Inverter 3 Fasa Untuk Putaran Motor BLDC
Hall Sensors Value (H3 H2
H1)
Phase Switches
1 0 0 A – B S1 ; S2; S6
1 1 0 A – C S1 ; S3 ; S2
0 1 0 B – C S4 ; S3 ; S2
0 1 1 B – A S4 ;S3 ; S5
0 0 1 C – A S4 ; S6 ; S5
1 0 1 C – B S1 ; S6 ; S5
Setiap sakelar pada inverter 3 fasa terkonduksi berpasangan sebesar 60° sesuai
urutan seperti pada Tabel . Pada saat posisi hall [101] sakelar yang terkonduksi adalah
S1,S5,S6 sehingga VDC akan mengalir melalui S1 dan S5 menuju kumparan A – B dan
kembali melalu S6. Pada saat posisi hall [100] sakelar yang terkonduksi adalah
S1,S2,S6 sehingga VDC akan mengalir melalui S1 menuju kumparan A – C dan
kembali melalui S2 dan S6. Pada saat posisi hall [110] sakelar yang terkonduksi adalah
S1,S2,S3 sehingga VDC akan mengalir melalui S1 dan S3 menuju kumparan B – C dan
kembali melalui S2. Pada saat posisi hall [010] sakelar yang terkonduksi adalah
S2,S3,S4 sehingga VDC akan mengalir melalui S3 menuju kumparan B – A dan
kembali melalui S2 dan S4. Pada saat posisi hall [011] sakelar yang terkonduksi adalah
S3,S4,S5 sehingga VDC akan mengalir melalui S3 dan S5 menuju kumparan C – A dan
kembali melalui S4. Pada saat posisi hall [001] sakelar yang terkonduksi adalah
S4,S5,S6 sehingga VDC akan mengalir melalui S5 menuju kumparan C – B dan
kembali melalui S4 dan S6.
PENGUJIAN DAN ANALISA
Pengujian dilakukan untuk melihat kesesuaian metode yang telah didesain
dengan hasil implementasi. Secara umum dilakukan pengujian pada metode six-step
comutation yang diusulkan, kemudian dilakukan pengujian secara terintegrasi pada
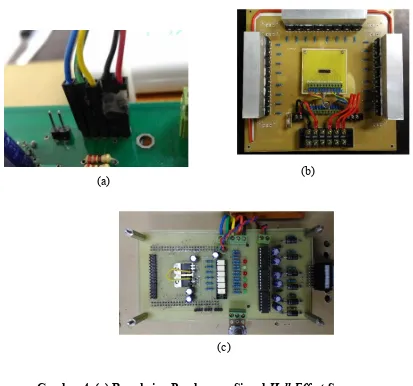
inverter yang telah dibuat baik secara open-loop dan close-loop.Gambar 4 menunjukkan
implementasi dari metode yang telah didesain.
(a) (b)
(c)
Gambar 4. (a) Rangkaian Pembacaan Sinyal Hall Effect Sensor;
(b) Rangakain inverter 3 fasa untuk motor BLDC; (c) Rangakaian
mikrokontroler ARM STM32F407VG dan driver six-step comutation inverter
Pada Gambar 4 (c) terdapat 6 PORT yang digunakan untuk menghasilkan sinyal
penyulutan MOSFET dan 3 PORT untuk menerima sinyal dari hall effect sensor. Sinyal
penyulutan untuk sisi high side (H1,H2,H3) secara berurutan terhubung pada GPIOC.1,
GPIOC.3, dan GPIOA.1. Sedangkan untuk sisi low side (L1,L2,L3) secara berurutan
terhubung pada GPIOC.6, GPIOC.7, dan GPIOC.8 Sinyal masukan hall effect sensor
secara berurutan terhubung pada GPIOB.3, GPIOB.5, dan GPIOB.7. Pada perancangan
modul mikrokontrol ini juga terdapat PORT PA.0 sebagai input Analog to Digital
Converter (ADC) untuk pengaturan kecepatan motor BLDC.
Dalam pengujian sinyal keluaran dibutuhkan rangkaian pembacaan hall effect sensor.
TE-‐268
4 (a) terdapat 3 buah resistor pull up yang nilainya masing-masing 220 Ω. Resistor pull
up mendapatkan sumber sebesar 3V dari mikrokontroler dan juga terhubung degan hall
effect sensor yang masuk ke mikrokontrol pada PORT GPIO. Pada rangkaian ini juga
terhubung dengan sumber 5V sebagai tegangan aktivasi hall efect sensor.
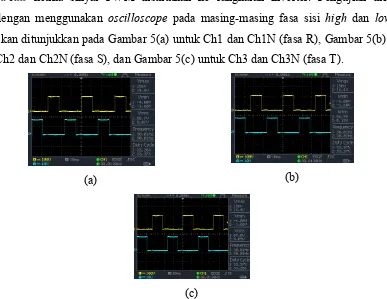
1. Pengujian Sinyal PWM Six-Step Comutation pada Kontroler
Pada penelitian ini, sebelum membangkitkan sinyal berdasarkan konfigurasi hall
effect sensor, dilakukan pembangkitan berdasarkan timming waktu terlebih dahulu.
Sinyal PWM akan dibangkitkan secara berulang dan terus menerus melalui modul
mikrokontroler. Agar pada tiap fasa tidak ada mosfet sisi high dan low yang menyala
secara bersamaan, maka diperlukan dead time (waktu mati) agar tidak terjadi short
circuit ketika sinyal PWM disulutkan ke rangkaian inverter. Pengujian dilakukan
dengan menggunakan oscilloscope pada masing-masing fasa sisi high dan low yang
akan ditunjukkan pada Gambar 5(a) untuk Ch1 dan Ch1N (fasa R), Gambar 5(b) untuk
Ch2 dan Ch2N (fasa S), dan Gambar 5(c) untuk Ch3 dan Ch3N (fasa T).
(a) (b)
(c)
Gambar 5. (a)Pulsa keluaran PWM Ch1 dan Ch1N; (b) Pulsa keluaran PWM Ch2 dan Ch2N; (c) Gambar 7. Pulsa keluaran PWM Ch3 dan Ch3N
Dari Gambar 5(a),(b), dan (c) pengamatan pulsa keluaran pada Ch1, Ch2, dan Ch3
dapat digambarkan perbedaan masing-masing pulsanya. Untuk tiap fasa high dan fasa
low memiliki perbedaan sudut penyulutan sebesar 120°. Dan untuk masing-masing Ch
antara high dan low memiliki nilai dead time sebesar 60°. Urutan penyulutan dapat
dilihat pada Tabel 2.
Tabel 2.
Perbedaan sudut penyulutan sisi high dan low pada masing-masing Ch1, Ch2, dan Ch3
SUDUT FASA 60 120 180 240 300 360 2. Pengujian Sistem secara Open-loop
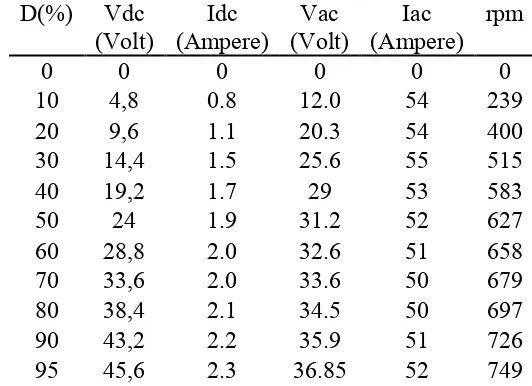
Pengujian rangkaian inverter 3 fasa open loop dilakukan dengan memberikan
tegangan masukan konstan melalui pengaturan perubahan nilai duty cycle secara
bertahap. Data dilakukan dengan memberikan masukan sumber sebesar 48V dari nilai
duty cycle 0% sampai duty cycle 95%. Pengujian dengan dilakukan dengan
menghubungkan 4 buah accu 12V secara seri, sehingga tegangan yang dihasilkan
sebesar 48V. Sisi poisitf (+) dan negatif (-) accu dihubungkan langsung ke inverter
sebagai sumber. Nilai duty cycle diubah bertahap dari 0% sampai 95% sehingga
didapatkan data seperti pada Tabel 3.
Tabel 3.
TE-‐270
Dari data yang diamati, dapat digambarkan menjadi grafik agar lebih mudah diamati.
Respon arus terhadap perubahan duty cycle pada saat pengujian dilakukan, dijelaskan
pada Gambar 6.
Gambar 6. Respon Arus Masukan Motor BLDC Terhadap Perubahan Duty Cycle
Menggunakan Sumber Accu
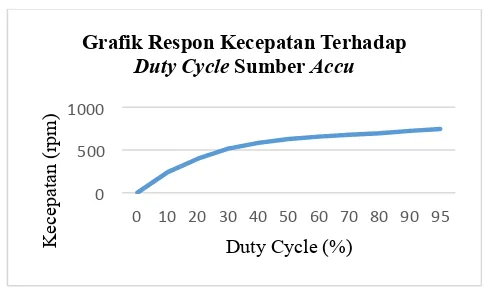
Gambar 7. Respon Kecepatan Motor BLDC Terhadap Perubahan Duty Cycle
Menggunakan Sumber Accu
Respon kecepatan terhadap perubahan duty cycle pada saat pengujian dilakukan,
dijelaskan pada Gambar 7. Berdasarkan gambar 6 dan 7 menunjukkan bahwa metode
yang diusulkan dapat dioperasikan pada kondisi open-loop.
3. Pengujian Sistem secara Close-loop
Secara konsep, pengujian rangkaian inverter 3 fasa secara close-loop dilakukan
agar motor dapat berputar pada kecepatan putaran konstan. Pada pengujian ini, nilai
kecepatan yang diharapkan adalah dapat bertahan pada 450 rpm. Secara teknis, pada
mikrokontroler dimasukkan program agar duty cycle dapat berubah secara otomatis
setelah throtle gas diinjak. Variabel perhitungan akan mengatur agar kecepatan dapat
0
dipertahankan pada 450 rpm. Apabila pembacaan kecepatan lebih dari 450 rpm, maka
variabel perhitungan akan otomatis mengurangi nilai duty cycle dan akan menyesuaikan
agar kecepatan motor tdak melebihi 450 rpm. Kondisi yang sama juga terjadi apabila
kecepatan motor dibawah 450 rpm. Maka, variabel perhitugan akan otomatis menambah
nilai duty cycle dan akan menyesuaikan agar kecepatan motor dapat mencapai 450 rpm.
Data dari pengujian ini dapat dilihat pada Tabel 4.
Tabel 0.
Data Variabel Masukan Dan Keluaran Motor BLDC Secara Terkontrol Dengan Variasi Pembebanan
BEBAN D(%) Vdc Idc Vac Iac Rpm
Free Run (Tanpa beban 1) 55,74 26,76 2 23 43 450 Free Run (Tanpa beban 2) 22,3 10,70 1.3 23 55 450
6 kg 30,66 14,72 2 22.5 67 450
200kg 68,17 32,72 22 24 61 450
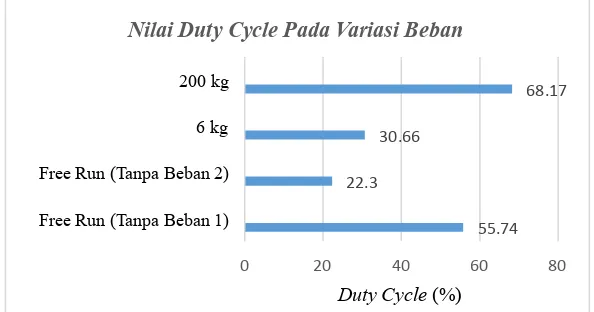
Pada gambar 8, dapat dilihat bahwa dengan variasi pembebanan yang berbeda,
maka diperlukan nilai duty cycle yang berbeda-beda agar motor dapat berputar 450 rpm.
Pada masing-masing pembebanan, dapat diberikan tambahan beban yang lebih besar
lagi karena masih memiliki sapreduty cycle.
Gambar 8. Perbandingan Pemakaian Duty Cycle Pada Variasi Pembebanan
Dengan bertambahnya berat beban yang dibawa motor, maka kebutuhan torsi
motor juga akan meningkat. Peningkatan kebutuhan torsi ini berbanding lurus dengan
konsumsi arus, sehingga semakin berat beban yang dibawa motor, maka semakin besar
pula arus yang dikonsumsi oleh motor.
55.74 22.3
30.66
68.17
0 20 40 60 80
Free Run (Tanpa Beban 1) Free Run (Tanpa Beban 2) 6 kg 200 kg
TE-‐272 SIMPULAN
Berdasarkan data hasil pengujian sistem menggunakan metode yang diusulkan,
penggunaan metode six-step comutation dapat diterapkan pada kontrol motor BLDC.
Penerapan metode ini juga harus mempertimbangkan dead time (waktu mati) agar tidak
terjadi short circuit ketika sinyal PWM disulutkan ke rangkaian inverter. Metode ini
juga memungkinkan untuk diaplikasikan pada kondisi close-loop sehingga motor selalu
berada kecepatan yang konstan walaupun kondisi beban berubah-ubah.
REFERENSI
Windarko, Novie Ayub, et al. "Optimized PI constant for current controller of grid connected inverter with LCL filter using genetic algorithm." Electrical Engineering and Informatics (MICEEI), 2014 Makassar International Conference on. IEEE, 2014.
Raharja, L. P. S., Arief, Z., & Windarko, N. A. (2017). Reduction of Total Harmonic Distortion (THD) on Multilevel Inverter with Modified PWM using Genetic Algorithm. EMITTER International Journal of Engineering Technology, 5(1), 91-118.
Lee, Seung-Tae, and Jin Hur. "Detection Technique for Stator Inter-Turn Faults in BLDC Motors Based on Third-Harmonic Components of Line Currents." IEEE Transactions on Industry Applications 53.1 (2017): 143-150.
Masmoudi, Mourad, Bassem El Badsi, and Ahmed Masmoudi. "DTC of B4-inverter-fed BLDC motor drives with reduced torque ripple during sector-to-sector commutations." IEEE Transactions on Power Electronics 29.9 (2014): 4855-4865. Ozturk, Salih Baris, William C. Alexander, and Hamid A. Toliyat. "Direct torque
control of four-switch brushless DC motor with non-sinusoidal back EMF." IEEE Transactions on Power Electronics25.2 (2010): 263-271.
Rao, A. Purna Chandra, Y. P. Obulesh, and Ch Sai Babu. "Mathematical modeling of BLDC motor with closed loop speed control using PID controller under various loading conditions." ARPN Journal of engineering and applied sciences 7.10 (2012): 1321-1328.
Al-Mashakbeh, Atef Saleh Othman. "Proportional integral and derivative control of brushless dc motor." European Journal of Scientific Research 35.2 (2009): 198-203.