ABSTRAK
ada umumnya di industri manufaktur banyak menggunakan mesin yang berputar, salah satunya adalah pompa motor. Salah satu metode pemeliharaan yang digunakan adalah predictive maintainance (PdM), yang menuntut operator untuk terjun langsung ke lapangan. Dalam penelitian ini, penulis mencoba mengembangkan konsep monitoring kondisi mesin dari jarak jauh. Dalam implementasinya, konsep ini ditekankan pada pemisahan sinyal suara yang diemisikan oleh beberapa mesin dengan menggunakan algoritma independentcomponent analysis (ICA) yang direkam dengan menggunakan teknik mikrofon array dengan asumsi bahwa sinyal dari emisi mesin bersifat stasioner dan bebas. Proses pemisahan yang dilakukan menggunakan dua teknik yaitu, time domain ICA danfrequency domain ICA. Penelitian ini dilakukan dalam kondisi riil di lapangan untuk mengetahui unjuk kerja dari metode yang digunakan dimana unjuk kerja ditunjukkan dengan nilai MSE(Mean Square Error). Hasil dari penelitian ini menunjukkan bahwa unjuk kerja dari ICA menurun.Hal ini ditunjukkan dengan nilai MSE sebesar 0,9 untuk TDIC A dan 1,08 untuk FDICA dimana nilai ini lebih tinggi dari pada penelitian sebelumnya yang dilakukan diruang kedap.Metode analisa dengan akustik ini juga divalidasi dengan metode vibrasi, dimana dari sini diketahui bahwa terjadi pergeseran frekuensi antara frekuensi yang dihasilkan oleh metode akustik dan vibrasi sebesar antara 1-10%.
Kata Kunci: TDICA, FDICA,MSE, Sinyal Suara.
1. PENDAHULUAN
Monitoring kondisi mesin khususnya mesin berputar (rotating machinery), merupakan hal penting dalam dunia Industri. Hal tersebut dilakukan guna menjaga kelangsungan proses produksi agar tidak terjadi trip yang mengharuskan proses produksi terhenti. Pada saat ini kebanyakan metode yang digunakan untuk memonitoring kondisi mesin di industri adalah analisis getaran. Analisis getaran menganalisa pola getaran berdasarkan parameter-parameter getaran seperti frekuensi, amplitudo dan phasa. Perubahan terhadap parameter tersebut menunjukkan adanya kelainan pada mesin yang dapat diidentifikasi sebagai kerusakan mesin [1].Namun demikian metode ini masih mempunyai banyak kelemahan.Untuk itulah perlu dikembangkan teknik prediksi kerusakan mesin yang baru.
Adanya perubahan getaran menimbulkan perubahan terhadap suara yang di-emisikan mesin. Dengan kata lain, perubahan suara merupakan manifestasi adanya perubahan pola getaran mesin. Seperti halnya sinyal getaran, sinyal suara juga sensitif terhadap parameternya: frekuensi, amplitudo dan phasa. Dari sinilah mulai dikembangkan teknik baru deteksi kerusakan menggunakan analisa suara dengan cara memisahkan dan mengekstraksi sinyal suara yang ditangkap oleh sensor berupa mikrofon array.
Bagus (2009), Septian (2010) dan Aris (2010) mengembangkan penelitian tersebut dengan fokus yang berbeda untuk beberapa mesin sekaligus yang bekerja secara bersamaan dan memisahkan sinyal suara tiap mesin dari suara campuran dengan metode pemisahan sinyal buta (BSS, Blind Source
PENERAPAN INDEPENDENT COMPONENT ANALYSIS
(ICA)UNTUK PEMISAHAN SINYAL SUARA MESIN
BERPUTAR
DI PT. G RESIK PO WER INDONESIA (THE LINDE GROUP)
Dian Nur Hayati, Dhany Arifianto Jurusan Teknik Fisika Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember (ITS) Kampus ITS Sukolilo, Surabaya - 60111
email : {dian, dhany}@ep.its.ac.id
Separation).Perkembangan penelitian tersebut menunjukkan hasil yang signifikan dan pengaruh bising lingkungan tidak banyak mempengaruhi sistem analisanya.Namun demikian penelitian ini masih dalam skala laboratorium dan belum diketahui kinerjanya secara riil di lapangan, yang mana pada kenyataanya di lapangan banyak terdapat noise.
Melalui penelitian ini penulis mencoba mengimplementasikan metode BSS model Independent Component Analysis (ICA) di riil plant yaitu di PT. Gresik Power Indonesia (The Linde Group) untuk mengetahui kinerja sesungguhnya yang ditunjukkan dengan nilai dari MSE untuk pemisahan sinyal suara. Hasil dari penelitian ini diharapkan nantinya dapat digunakan untuk mendeteksi kerusakan mesin, dan apabila dimungkinkan dilakukan perbaikan dan pengembangan atas metode yang sudah ada.
2. DASAR TEORI 2.1 Mesin Berputar
Mesin berputar merupakan mesin yang berfungsi untuk mengubah energi listrik menjadi energi mekanik berupa putaran. Jenis-jenis mesin berputar yang sering digunakan diantaranya fan/kipas, blower, pompa, turbin, dan motor. Di dunia industri mesin berputar ini mempunyai peranan yang besar dalam proses produksi. Mesin ini terdiri dari beberapa bagian, antara lain rotor, bearing,shaft dll yang menjadi kesatuan dari mesin berputar. Bagian dari mesin berputar ini bisa dilihat pada gambar di bawah ini :
Gambar 1.Bagian-Bagian Mesin Berputar[7] 2.2 M ikrofon Array
Mikrofon Array adalah salah satu contoh dari Sensor Array. Metode Array sensor ini menggunakan beberapa sensor atau banyak sensor untuk mengindera sinyal fisis yang dibawa oleh propagasi gelombang. Salah satu jenis dari sensor ini bisa dilihat pada gambar 2 di bawah ini :
Gambar 2. Sensor Mikrofon array[8]
Aplikasi dari sensor ini adalah untuk mengekstraksi sinyal input berupa suara dari kebisingan latar. Pola penyebaran/distribusi suara pada sensor ini bersifat omnidirectional atau merata [8].Padagambar 3di bawah ini terdapat dua micophone untuk menangkap dua sinyal suara yang dihasilkan oleh sumber, s1dan s2.
Gambar 3.Penerimaan Sinyal Akustik pada MikrofonArray[4]
Jarak s1 lebih dekat ke kedua microphone
dibandingkan jarak s2. Output kedua sumber akan
diterima oleh kedua microphone. Karena jarak s1
lebih dekat maka akan diterima lebih dulu oleh microphone dan menguatkan sinyal suara dari s2,
sehingga karena lebih jauh sinyal s2 mengalami
pelemahan [9]. Output kombinasi dari M-microphoney[n] tersebut dapat dituliskan:
0 [ ] ( ) M m y n x n m
(1)Dimana delay, τ dapat dihitung dari kecepatan suara, v cos d v (2)
d adalah jarak antar mic dan θ adalah sudut datang sumber.
Dengan menggunakan susunan dari beberapa microphone(Micophone Array) daripada satu microphone, maka dapat dicapai kemampuan menyeleksi ruang (spatial-selectivity) serta menguatkan sinyal propagasi dari sumber arah
khusus (spatial-direction), sambil melemahkan propagasi sumber dari arah lain. Micophone Array ini merupakan interpretasi dari algoritma BSS [10]. 2.3 Algoritma Blind Source Separation (BSS)
Model ICA
Blind Source Separation adalah salah satu cara untuk memisahkan secara buta suatu sinyal tercampur (mixed signal) menjadi sejumlah sinyal pembentuknya.
Gambar 4.Pemisahan Sumber Secara Buta[12]
Pada gambar 4 di atas, ZT merupakan sumber dan A adalah matrik percampuran sedangkan XT adalah sinyal campuran yang tertangkap oleh sensor. BSS merupakan salah satu teknik yang digunakan untuk memperoleh sumber dari percampuran secara buta.Karena setiap komponen yang tercampur bersifat bebas, maka sinyal yang tercampur ini dapat direkontruksi kembali menjadi sinyal pembentuknya.
Tujuan dari algoritma BSS adalah bagaimana mendapatkan estimasi sumber ZT dari output pengukuran sensor XT. Secara matematis, jumlahan sinyal akustik diatas dapat diformulasikan:
xi(t)= A*zn(t)+n(t) (3)
diamana x=[x1,x2,...xm]T adalah vektor yang
mewakili sinyal terukurxi, z=[z1,z2,...,zn] adalah
vektor yang mewakili sumber. A adalah matriks jumlahan yang menduduki kolom penuh. BSS digunakan untuk menemukan matriks A-1, karena A
-1
x sama dengan matrik sumber zdengan x terukur [12].
Gambar 5.Sinyal Rekontruksi dari Pemisahan dengan BSS[12]
Dengan algoritma BSS akan dicari sinyal sumber z(t), dimana keduanya telah terjumlah dalam x. Sistem Kerja BSS adalah memisahkan sinyal sumber (source, komponen independen, dalam hal ini suara) secara buta (blind), yakni tanpa mengetahui vektor jumlahan A (A=[a(α1)...a(αN)]).
Permasalahan pada BSS adalah mengestimasi matriks jumlahan A dan sumber independen z(t) dengan T untuk x(t). Meskipun noise dapat diestimasi, z(t) tidak dapat diperoleh secara eksak. Pendekatan untuk mengatasi masalah BSS ini dapat dilakukan dengan metode Independent Component Analysis (ICA), yaitu dengan analisa bahwa sifat dari masing-masing sinyal bebas sehingga suatu informasi dari satu sinyal tidak bisa dicari dari sinyal yang lainnya. Pada gambar 5 di atas sumber z(t) di estimasikan dengan sinyal y(t), yang mana matrik W = A-1
2.4 Wide Sense Stationary (WSS)
Wide sense stationary merupakan suatu proses stokastik atau acak yang menyatakan bahwa distribusi sistem tidak berubah terhadap waktu jika sistem yang ditinjau bersifat tetap atau stasioner [16]. Jadi distribusi ini sering digunakan untuk menganalisa sistem yang bersifat tetap. WSS dapat dinyatakan dengan persamaan sebagai berikut ini :
(3)
Pada persamaan 3 diatas, dinyatakan bahwa nilai awal pengukuran sama dengan nilai akhir dari pengukuran, sehingga persamaan tersebut bersifat tetap dimana kondisi awal sama dengan kondisi akhir atau bisa dikatakan bahwa sistem konstan terhadap fungsi waktu.
Di dalam pemrosesan sinyal, sinyal dikatakan stasioner jika fluktuasi dari sinyal masih dalam
batas atau range frekuensi yang telah ditentukan. Sehingga sinyal dapat dianggap sama mulai dari awal pengukuran sampai akhir atau stasioner. Contoh dari sinyal stasioner dengan bukan stasioner bisa dilihat pada gambar 6 di bawah ini. Pada gambar 6 yang atas adalah contoh sinyal stasioner,dimana fluktuasi dari sinyal hanya berkisar antara amplitude -5 sampai 5 sehingga sinyal bisa dikatakan stasioner. Untuk gambar 6 yang bawah, merupakan contoh dari sinyal non-stasioner yang mana fluktuasi dari sinyal lebih tajam, sehingga amplitudo tidak pada posisi segaris.
Gambar 6.Contoh Sinyal Stasioner dan Bukan Stasioner[16]
Suara mesin yang dihasilkan oleh emisi mesin kebanyakan bersifat stasioner atau tetap. Yang mana suara yang dihasilkan akan tetap sepanjang waktu jika tidak ada gangguan yang terjadi pada mesin. Hal inilah yang bisa digunakan sebagai acuan dalam penelitian di sini sehingga pemisahan sinyal bisa dilakukan dengan lebih mudah.
2.5 Mean Square Error (MSE)
MSE merupakan suatu metode untuk mengukur perbedaan antara estimator (sinyal rekonstruksi) dan nilai sebenarnya (sinyal baseline) dari kuatitas yang diperkirakan . Secara garis besar dengan menghitung nilai MSE, maka akan diperoleh selisih pergeseran yang diperoleah antara sinyal asli dan sinyal rekonstruksi., yang dapat ditunjukkan pada persamaan di bawah ini[2],
=1 ( − )
dimana,
MSE = Mean Square Error n = jumlah sample
S = sinyal asli (baseline) Sc = sinyal hasil estimasi
Secara garis besar teknik yang pemisahan dengan menggunakan time-domain IC A (TDICA) danfrequency-domainICA(FDICA) serta pengidentifikasian kerusakkan mesin dengan melihat secara kualiatif sinyal dengan frekuensi sesaat.
3. METODOLOGI PENELITIAN
Pada penelitian ini digunakan mesin CWP (Cooling Water Pump) atau pompa untuk pendingin uap yang mempunyai peranan utama dalam proses produksi. Tahapan yang digunakan pada penelitian ini dapat dibagi menjadi empat tahap. Pertama adalah penentuan titik pengukuran, yaitu dengan pengukuran di medan dekat. Untuk memperoleh titik medan dekat pengukuran, digunakan alat Sound Level Meter untuk mengukur tingkat tekanan bunyi, yang mana medan dekat diperoleh jika tingkat tekanan bunyi di sekeliling mesin menjukkan hasil yang sama. Dalam penelitian ini didapatkan medan dekatnya berada pada jarak 97 cm dari mesin dengan tingkat tekanan bunyi berkisar 97 dB seperti yang terlihat pada gambar 3 dibawah ini :
Gambar 7. Posisi dari Peletakan Sensor Pengukuran
Kedua adalah proses perekaman sinyal suara mesin pompa. Proses perekaman dilakukan pada bagian NDE (Non-Drive-End) atau bagian mesin yang jauh dengan kopling dan DE (Drive End) atau bagian mesin yang dekat dengan kopling pompa. Setting perekaman sinyal suara mesin pompa adalah mono, 32 bit (recording depth), 32 bit (audio mix down), vol.15 dan frekuensi sampling 44100 Hz.
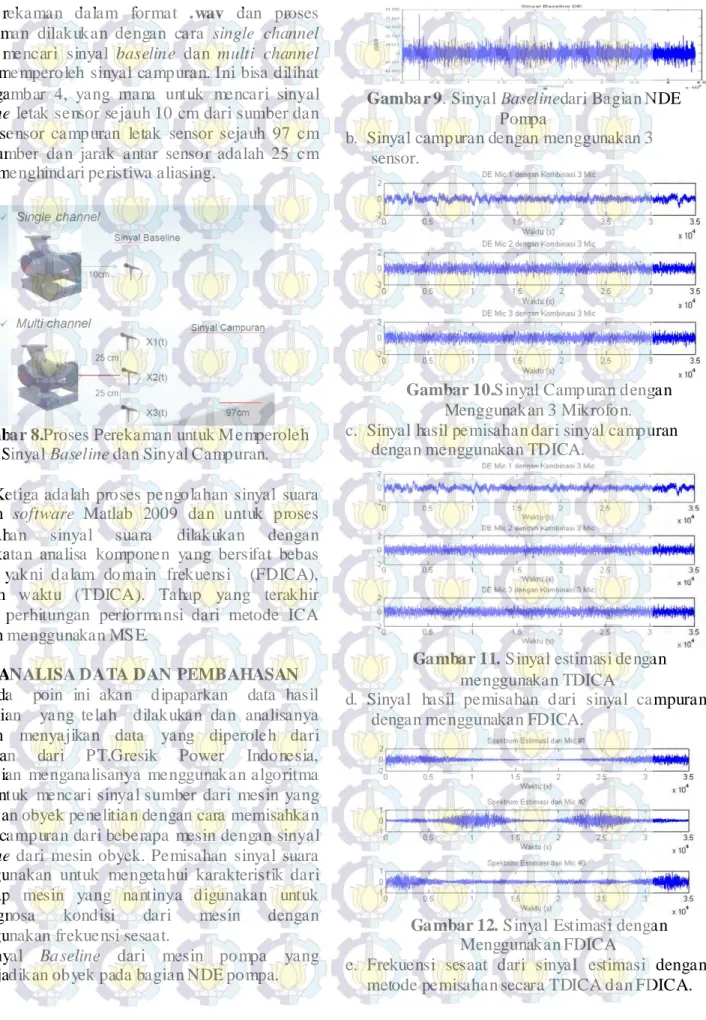
Hasil rekaman dalam format .wav dan proses perekaman dilakukan dengan cara single channel untuk mencari sinyal baseline dan multi channel untuk memperoleh sinyal campuran. Ini bisa dilihat pada gambar 4, yang mana untuk mencari sinyal baseline letak sensor sejauh 10 cm dari sumber dan untuk sensor campuran letak sensor sejauh 97 cm dari sumber dan jarak antar sensor adalah 25 cm untuk menghindari peristiwa aliasing.
Gambar 8.Proses Perekaman untuk Memperoleh Sinyal Baseline dan Sinyal Campuran. Ketiga adalah proses pengolahan sinyal suara dengan software Matlab 2009 dan untuk proses pemisahan sinyal suara dilakukan dengan pendekatan analisa komponen yang bersifat bebas (ICA) yakni dalam domain frekuensi (FDICA), domain waktu (TDICA). Tahap yang terakhir adalah perhitungan performansi dari metode ICA dengan menggunakan MSE.
4. ANALISA DATA DAN PEMBAHASAN Pada poin ini akan dipaparkan data hasil penelitian yang telah dilakukan dan analisanya dengan menyajikan data yang diperoleh dari lapangan dari PT.Gresik Power Indonesia, kemudian menganalisanya menggunakan algoritma ICA untuk mencari sinyal sumber dari mesin yang dijadikan obyek penelitian dengan cara memisahkan sinyal campuran dari beberapa mesin dengan sinyal baseline dari mesin obyek. Pemisahan sinyal suara ini digunakan untuk mengetahui karakteristik dari tiap-tiap mesin yang nantinya digunakan untuk mediagnosa kondisi dari mesin dengan menggunakan frekuensi sesaat.
a. Sinyal Baseline dari mesin pompa yang dijadikan obyek pada bagian NDE pompa.
Gambar 9. Sinyal Baselinedari Bagian NDE Pompa
b. Sinyal campuran dengan menggunakan 3 sensor.
Gambar 10.Sinyal Campuran dengan Menggunakan 3 Mikrofon. c. Sinyal hasil pemisahan dari sinyal campuran
dengan menggunakan TDICA.
Gambar 11. Sinyal estimasi dengan menggunakan TDICA
d. Sinyal hasil pemisahan dari sinyal campuran dengan menggunakan FDICA.
Gambar 12. Sinyal Estimasi dengan Menggunakan FDICA
e. Frekuensi sesaat dari sinyal estimasi dengan metode pemisahan secara TDICA dan FDICA.
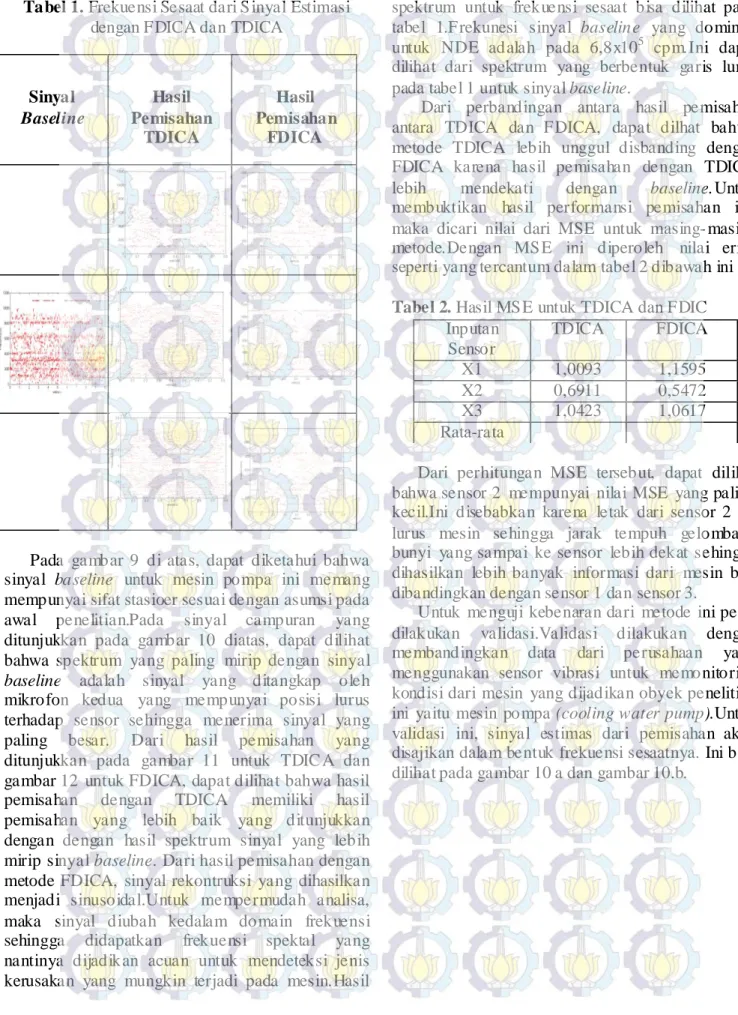
Tabel 1. Frekuensi Sesaat dari Sinyal Estimasi dengan FDICA dan TDICA
Pada gambar 9 di atas, dapat diketahui bahwa sinyal baseline untuk mesin pompa ini memang mempunyai sifat stasioer sesuai dengan asumsi pada awal penelitian.Pada sinyal campuran yang ditunjukkan pada gambar 10 diatas, dapat dilihat bahwa spektrum yang paling mirip dengan sinyal baseline adalah sinyal yang ditangkap oleh mikrofon kedua yang mempunyai posisi lurus terhadap sensor sehingga menerima sinyal yang paling besar. Dari hasil pemisahan yang ditunjukkan pada gambar 11 untuk TDIC A dan gambar 12 untuk FDICA, dapat dilihat bahwa hasil pemisahan dengan TDICA memiliki hasil pemisahan yang lebih baik yang ditunjukkan dengan dengan hasil spektrum sinyal yang lebih mirip sinyal baseline. Dari hasil pemisahan dengan metode FDICA, sinyal rekontruksi yang dihasilkan menjadi sinusoidal.Untuk mempermudah analisa, maka sinyal diubah kedalam domain frekuensi sehingga didapatkan frekuensi spektal yang nantinya dijadikan acuan untuk mendeteksi jenis kerusakan yang mungkin terjadi pada mesin.Hasil
spektrum untuk frekuensi sesaat bisa dilihat pada tabel 1.Frekunesi sinyal baseline yang dominan untuk NDE adalah pada 6,8x105 cpm.Ini dapat dilihat dari spektrum yang berbentuk garis lurus pada tabel 1 untuk sinyal baseline.
Dari perbandingan antara hasil pemisahan antara TDICA dan FDICA, dapat dilhat bahwa metode TDICA lebih unggul disbanding dengan FDICA karena hasil pemisahan dengan TDICA lebih mendekati dengan baseline.Untuk membuktikan hasil performansi pemisahan ini, maka dicari nilai dari MSE untuk masing- masing metode.Dengan MSE ini diperoleh nilai error seperti yang tercantum dalam tabel 2 dibawah ini : Tabel 2. Hasil MSE untuk TDICA dan FDIC
Inputan Sensor TDICA FDICA X1 1,0093 1,1595 X2 0,6911 0,5472 X3 1,0423 1,0617 Rata-rata
Dari perhitungan MSE tersebut, dapat dilihat bahwa sensor 2 mempunyai nilai MSE yang paling kecil.Ini disebabkan karena letak dari sensor 2 ini lurus mesin sehingga jarak tempuh gelombang bunyi yang sampai ke sensor lebih dekat sehingga dihasilkan lebih banyak informasi dari mesin bila dibandingkan dengan sensor 1 dan sensor 3.
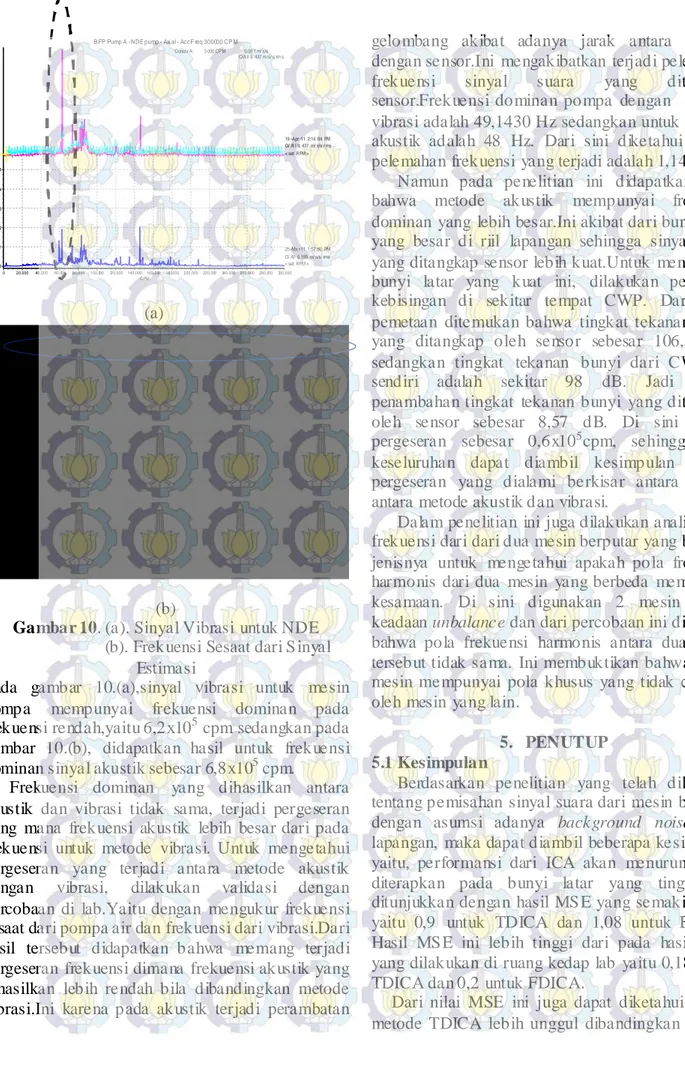
Untuk menguji kebenaran dari metode ini perlu dilakukan validasi.Validasi dilakukan dengan membandingkan data dari perusahaan yang menggunakan sensor vibrasi untuk memonitoring kondisi dari mesin yang dijadikan obyek penelitian ini yaitu mesin pompa (cooling water pump).Untuk validasi ini, sinyal estimas dari pemisahan akan disajikan dalam bentuk frekuensi sesaatnya. Ini bisa dilihat pada gambar 10 a dan gambar 10.b.
Sinyal Baseline Hasil Pemisahan TDICA Hasil Pemisahan FDICA
(a)
(b)
Gambar 10. (a). Sinyal Vibrasi untuk NDE (b). Frekuensi Sesaat dari Sinyal
Estimasi
Pada gambar 10.(a),sinyal vibrasi untuk mesin pompa mempunyai frekuensi dominan pada frekuensi rendah,yaitu 6,2x105 cpm sedangkan pada gambar 10.(b), didapatkan hasil untuk frekuensi dominan sinyal akustik sebesar 6,8x105 cpm.
Frekuensi dominan yang dihasilkan antara akustik dan vibrasi tidak sama, terjadi pergeseran yang mana frekuensi akustik lebih besar dari pada frekuensi untuk metode vibrasi. Untuk mengetahui pergeseran yang terjadi antara metode akustik dengan vibrasi, dilakukan validasi dengan percobaan di lab.Yaitu dengan mengukur frekuensi sesaat dari pompa air dan frekuensi dari vibrasi.Dari hasil tersebut didapatkan bahwa memang terjadi pergeseran frekuensi dimana frekuensi akustik yang dihasilkan lebih rendah bila dibandingkan metode vibrasi.Ini karena pada akustik terjadi perambatan
gelombang akibat adanya jarak antara sumber dengan sensor.Ini mengakibatkan terjadi pelemahan frekuensi sinyal suara yang ditangkap sensor.Frekuensi dominan pompa dengan metode vibrasi adalah 49,1430 Hz sedangkan untuk metode akustik adalah 48 Hz. Dari sini diketahui bahwa pelemahan frekuensi yang terjadi adalah 1,1430 Hz. Namun pada penelitian ini didapatkan hasil bahwa metode akustik mempunyai frekuensi dominan yang lebih besar.Ini akibat dari bunyi latar yang besar di riil lapangan sehingga sinyal suara yang ditangkap sensor lebih kuat.Untuk mengetahui bunyi latar yang kuat ini, dilakukan pemetaan kebisingan di sekitar tempat CWP. Dari hasil pemetaan ditemukan bahwa tingkat tekanan bunyi yang ditangkap oleh sensor sebesar 106,57 dB, sedangkan tingkat tekanan bunyi dari CWP itu sendiri adalah sekitar 98 dB. Jadi terjadi penambahan tingkat tekanan bunyi yang ditangkap oleh sensor sebesar 8,57 dB. Di sini terjadi pergeseran sebesar 0,6x105cpm, sehingga dari keseluruhan dapat diambil kesimpulan bahwa pergeseran yang dialami berkisar antara 1-10% antara metode akustik dan vibrasi.
Dalam penelitian ini juga dilakukan analisa pola frekuensi dari dari dua mesin berputar yang berbeda jenisnya untuk mengetahui apakah pola frekuensi harmonis dari dua mesin yang berbeda mempunyai kesamaan. Di sini digunakan 2 mesin dalam keadaan unbalance dan dari percobaan ini diketahui bahwa pola frekuensi harmonis antara dua mesin tersebut tidak sama. Ini membuktikan bahwa setiap mesin mempunyai pola khusus yang tidak dimiliki oleh mesin yang lain.
5. PENUTUP 5.1 Kesimpulan
Berdasarkan penelitian yang telah dilakukan tentang pemisahan sinyal suara dari mesin berputar dengan asumsi adanya background noisedi riil lapangan, maka dapat diambil beberapa kesimpulan yaitu, performansi dari ICA akan menurun ketika diterapkan pada bunyi latar yang tinggi. Ini ditunjukkan dengan hasil MSE yang semakin besar yaitu 0,9 untuk TDICA dan 1,08 untuk FDICA. Hasil MSE ini lebih tinggi dari pada hasil MSE yang dilakukan di ruang kedap lab yaitu 0,18 untuk TDICA dan 0,2 untuk FDICA.
Dari nilai MSE ini juga dapat diketahui bahwa metode TDICA lebih unggul dibandingkan dengan B FP Pump A - NDE pump - Axi al - Acc F req 300000 CP M
C PM 0 20,000 40,000 60,000 80,000 100,000 120,000140,000160,000 180,000200,000220,000 240,000260,000280,000 300,000 m /s /s r m s 0 1 2 3 4 5 0.08 1 m/ s/s 3 000 CPM Curso r A: O/All 9. 437 m /s/ s rm s 5.6084 25 -Ma r-11 1:57 :50 PM O/ All 6.199 m/ s/s rms < set RPM > 19 -Apr-11 2:14 :04 PM O/ Al l 9. 437 m/ s/s rms < set RPM >
FDICA dengan nilai MSE yang lebih kecil sehingga sinyal rekontruksi lebih mendekati baseline.
Frekuensi dominan yang dihasilkan oleh metode vibrasi adalah 2,5x105 cpm dan 6,3x105 cpm untuk mesin DE dan 6,2x105 cpm untuk mesin NDE. Sedangkan frekuensi dominan untuk metode akustik adalah 2x105 cpm dan 6,7x105 cpm, untuk mesin NDE adalah 6,8x105 cpm. Hasil yang seharusnya adalah frekuensi untuk vibrasi lebih tinggi dibandingkan metode akustik, kenyataan di riil lapangan menunjukkan hasil lain, yang mana metode akustik mempunyai frekuensi yang lebih besar. Ini disebabkan adanya bunyi latar yang tinggi sebesar 106,57 dB, sehingga bunyi yang ditangkap sensor mengalami penguatan sehingga mempunyai frekuensi yang tinggi. Pada penelitian ini juga belum diketahui pola khusus untuk masing- masing kondisi pada mesin.
5.2 Saran
1. Dilakukan pengkajian ulang terhadap algoritma dasar ICA, agar performansi dari pemisahan dengan metode ini meningkat walaupun bising latar juga semakin tinggi. 2. Penelitian tentang pola-pola khusus yang
dihasilkan mesin putar ketika mengalami kerusakan sehingga metode akustik sama seperti metode vibrasi yang mempunyai standart spektrum khas untuk masing-masing kerusakan.
6. DAFTAR PUSTAKA
[1] Newland, D.E., 2005, “An Introduction to Random Vibrations, Spectral and Wavelet Analysis”, Dover Publishing Co., New York, 2005.
[2] Anda, AR, “Penggunaan Frekuensi Sesaat Untuk Deteksi Pola Suara Kerusakan Motor Listrik”, Tugas Akhir, ITS, 2006.
[3] Rahmadana, Yuniar., “Penentuan Pola Suara Mesin Berputar pada Beberapa Kondisi Kerusakan dengan Metode Frukensi Sesaat”,Tugas Akhir, ITS, 2007.
[4] Tris Atmaja, Bagus., “Pemisahan Banyak Sumber Suara Mesin Dari Microphone Array Dengan Metode Independent Componen Analysis (ICA) Untuk Deteksi Kerusakan,” Tugas Akhir, ITS, 2008.
[5] Firmanda,Septian,”Identifikasi Secara Serentak Kerusakan Mesin Menggunakan Independent Component Analysis Berdasarkan Convolutive Mixture,” Tugas Akhir, ITS, 2010.
[6] Yunata, Aris Surya, “Identifikasi Kerusakan Mesin Secara Serentak di Ruang Terbuka dengan Independent Component Analysis,” Tugas Akhir, ITS, 2010.
[7] Girdhar, Paresh., 2004, ”Practical Machinery Vibration Analysis andPredictive Maintenance”, Oxford, Newnes Inc.
[8] http://en.wikipedia.org/wiki/Microphone_array
[9] Douglas, SC., 2001, “Microphone Array Technique and Application: BSS ofAcoustic Signal.” (Bredstein-D.Ware, Eds.), Berlin: Springer Inc.
[10] Parra, Lucas., 2002,”Tutorial on Blind Source Separationand Independent Component Analysis”, Adaptive image and signal processing group, Sarnoff Corporation.
[11] Hansen, lars K. Kongsgaard, Rasmus.,”Estimating the number of sources in a noisy convolutive mixture using Bic,” Denmark, informatics and mathematical modeling,B321
[12] http://www.mit.edu/~ gari/teaching/6.555/SLI-DES/BSShandouts.pdf
[13] Hicham, Shahram,Yannick.,2010,”Devillenoisy Cyclo-Stationary BSS Using Frequency DomainPseudo-Correlation”, Denmark, 18th European Signal Processing Conference (EUSIPCO-2010). [14] http://www.math.ntu.edu.tw/~ hchen/teaching/-StatInference/ otes/lecture32.pdf [15] http://en.wikipedia.org/wiki/Mean_squared_-error [16] http://en.wikipedia.org/wiki/File:Stationary- comparisonpn
BIODATA PENULIS
Nama : Dian Nur Hayati
Alamat :Jl. Raya Tanjung, Kalidawir, T.Agung RW03/RT03 TTL : T.Agung, 8 Mei 1988 Riwayat Pendidikan : 1. MI Tarbiyatussibyan Tanjung (1995-2001) 2. MTsN Tunggangri (2001-2004) 3. SMA 1 Ngunut (2004-2007) 4. Teknik Fisika ITS (2007-sekarang)
![Gambar 1.Bagian-Bagian Mesin Berputar [7]](https://thumb-ap.123doks.com/thumbv2/123dok/4598236.3354205/2.892.112.804.125.1152/gambar-bagian-bagian-mesin-berputar.webp)
![Gambar 4.Pemisahan Sumber Secara Buta [12]](https://thumb-ap.123doks.com/thumbv2/123dok/4598236.3354205/3.892.124.778.126.1148/gambar-pemisahan-sumber-secara-buta.webp)
![Gambar 6.Contoh Sinyal Stasioner dan Bukan Stasioner [16]](https://thumb-ap.123doks.com/thumbv2/123dok/4598236.3354205/4.892.116.778.124.1138/gambar-contoh-sinyal-stasioner-dan-bukan-stasioner.webp)