BAB II
LANDASAN TEORI
Pengetahuan yang mendukung perencanaan dan realisasi alat dalam skripsi ini, meliputi : limit switch, sensor resistif geser, sensor ultrasonik, sensor flowmeter, mikrokontroler, dan codevision AVR.
2.1. Perangkat Keras (Hardware) 2.1.1. Limit Switch
Limit switch merupakan jenis saklar yang dilengkapi dengan katup yang berfungsi menggantikan tombol. Namun sistem kerja limit switch berbeda dengan saklar pada umumnya, jika pada saklar umumnya sistem kerjanya akan diatur/ dikontrol secara manual oleh manusia (baik diputar atau ditekan). Sedangkan limit switch dibuat dengan sistem kerja yang berbeda, limit switch dibuat dengan sistem kerja yang dikontrol oleh dorongan atau tekanan (kontak fisik) dari gerakan suatu objek pada aktuator, sistem kerja ini bertujuan untuk membatasi gerakan ataupun mengendalikan suatu objek/mesin tersebut, dengan cara memutuskan atau menghubungkan aliran listrik yang melalui terminal kontaknya. Bentuk fisik limit switch dapat dilihat pada gambar 2.1.
Gambar 2.1. Bentuk Fisik Limit Swicth
Gambar 2.2. Sistem Kerja Limit Switch
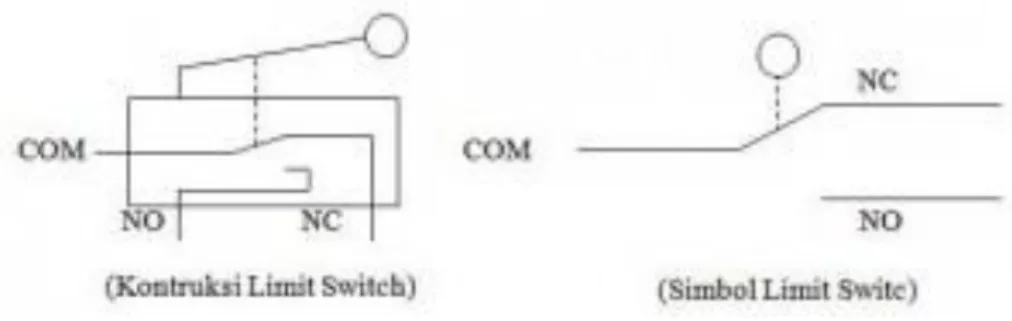
Limit switch memiliki 2 kontak yaitu NO (Normally Open) dan kontak NC (Normally Close) dimana salah satu kontak akan aktif jika tombolnya tertekan. Konstruksi dan simbol limit switch dapat dilihat seperti gambar 2.3. di bawah.
Gambar 2.3. Konstruksi dan Simbol Limit Switch
2.1.2. Sensor Resistif Geser (Potensiometer Geser)
Potensiometer adalah salah satu jenis resistor yang nilai resistansinya dapat diatur sesuai dengan kebutuhan pemakainya. Potensiometer merupakan keluarga resistor yang tergolong dalam kategori Variable Resistor. Secara struktur, Potensiometer terdiri dari 3 kaki terminal dengan sebuah shaft atau tuas yang berfungsi sebagai pengaturnya. Gambar 2.4. dibawah ini menunjukan bentuk fisik potensiometer geser.
Gambar 2.4. Bentuk Fisik Potensiometer Geser
Cara kerja potensiometer geser yaitu dengan cara menggeserkan Wiper-nya dari kiri ke kanan atau dari bawah ke atas sesuai dengan pemasangannya. Biasanya menggunakan Ibu Jari untuk menggeser wiper-nya.
2.1.3. Sensor Ultrasonik HC-SR04
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang dimana sensor menghasilkan gelombang pantulan ke benda yang kemudian menangkapnya kembali dengan perbedaan waktu sebagai dasar perhitungannya.. Perbedaan waktu antara gelombang pantulan yang di kembalikan dan yang diterima kembali adalah berbanding lurus dengan jarak atau tinggi objek yang memantulkannya.. Jenis objek yang dapat di indranya adalah padat, cair dan butiran. Tanpa kontak jarak 2 cm sampai 4 meter dengan akurasi 3 mm dan dapat dengan mudah dihubungkan dengan mikrokontroler malalui satu pin I/O saja. Bentuk fisik sensor ultrasonik dapat dilihat pada gambar 2.5.
Gambar 2.5. Bentuk Fisik Sensor Ultrasonik HC-SR04
Spesifikasi: :
b. 8 modul dapat digunakan bersama dalam satu sistem I2C-bus yang hanya membutuhkan 2 pin I/O mikrokontroler saja.
c. Membutuhkan catu daya tunggal +5 VDC, dengan konsumsi arus 17 mA typ (tanpa sensor infrared ranger).
d. Terdapat 2 mode operasi yaitu full operation dan reduced operation. Pada mode reduced operation beberapa komponen ultrasonic ranger akan dimatikan (saat idle) dan konsumsi arus mejadi 13 mA typ.
e. Terdiri dari sebuah ultrasonic ranger dengan spesifikasi: Mengukur jarak dari 2 cm hingga 4 m tanpa dead zone atau blank spot. Obyek dalam jarak 0 - 2 cm dideteksi sebagai 2 cm. Menggunakan burst sinyal kotak 16 Vp-p dengan frekuensi 40 kHz.
f. Dapat dihubungkan dengan maksimum 2 buah infrared ranger Sharp GP2D12 yang memiliki jangkauan pengukuran 10 - 80 cm.
g. Data keluaran sudah siap pakai dalam satuan mm (untuk antarmuka I2C) sehingga mengurangi beban mikrokontroler.
h. Ketelitian pengukuran jarak (ranger) adalah 5mm.
i. Siklus pengukuran yang cepat, pembacaan dapat dilakukan tiap 25 ms (40 Hz rate).
j. Memerlukan input trigger berupa pulsa negatif TTL (20µs min.) untuk antarmuka pulse width.
k. Tersedia 1 pin output yang menunjukkan aktifitas sensor, dapat tidak dimanfaatkan.
l. Tidak diperlukan waktu tunda sebelum melakukan pengukuran berikutnya. m. Kompensasi kesalahan dapat diatur secara manual untuk mengurangi pengaruh
faktor perubahan suhu lingkungan dan faktor reflektifitas obyek.
Cara menggunakan sensor ultrasonik yaitu: ketika kita memberikan tegangan positif pada pin Trigger selama 10uS, maka sensor akan mengirimkan 8 step sinyal ultrasonik dengan frekuensi 40kHz. Selanjutnya, sinyal akan diterima pada pin Echo. Untuk mengukur jarak benda yang memantulkan sinyal tersebut, maka selisih waktu ketika mengirim dan menerima sinyal digunakan untuk menentukan jarak benda tersebut.
Pada sensor ultrasonik, gelombang ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan
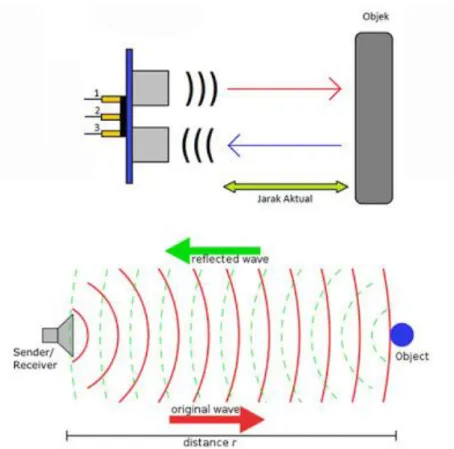
menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40kHz) ketika sebuah osilator diterapkan pada benda tersebut. Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut. Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterima. Cara kerja sensor ultrasonik dengan transmitter dan receiver dapat dilihat pada gambar 2.6.
Gambar 2.6. Cara kerja sensor ultrasonik dengan transmitter dan receiver (atas), sensor ultrasonik dengan single sensor yang berfungsi sebagai transmitter dan receiver sekaligus
Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut:
a. Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
b. Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
c. Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus :
S = 340.t/2
dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
2.1.4. Sensor Flowmeter EGO A-7
Sensor flowmeter terdiri dari tubuh katup plastik, rotor air, dan sensor efek hall. Ketika air mengalir melalui, gulungan rotor-rotor.Kecepatan perubahan dengan tingkat yang berbeda aliran. Sesuai sensor efek hall output sinyal pulsa. Kelebihan sensor ini adalah hanya membutuhkan 1 sinyal (SIG) selain jalur 5V dc dan Ground. Bentuk fisik sensor flowmeter dapat dilihat pada gambar 2.7.
Gambar 2.7. Bentuk Fisik Sensor Flowmeter EGO A-7
Water flow sensor ini terdiri atas katup plastik, rotor air, dan sebuah sensor hall-effect.Prinsip kerja sensor ini adalah dengan memanfaatkan fenomena efek Hall. Efek Hall ini didasarkan pada efek medan magnetik terhadap partikel bermuatan yang bergerak. Ketika ada arus listrik yang mengalir pada divais efek Hall yang ditempatkan dalam medan magnet yang arahnya tegak lurus arus listrik, pergerakan pembawa muatan akan berbelok ke salah satu sisi dan menghasilkan medan listrik. Medan listrik terus membesar hingga gaya Lorentz yang bekerja pada partikel menjadi nol. Perbedaan
potensial antara kedua sisi divais tersebut disebut potensial Hall. Potensial Hall ini sebanding dengan medan magnet dan arus listrik yang melalui divais.
2.1.5. Mikrokontroller Atmega 8535
Mikrokontroler merupakan sebuah single chip yang didalamnya telah dilengkapi dengan CPU (Central Processing Unit), RAM (Random Access Memori), ROM (Read Only Memori), Input dan Output, Timer/Counter, Serial com port secara spesifik digunakan untuk aplikasi – aplikasi kontrol dan aplikasi serbaguna. Perangkat ini sering digunakan untuk kebutuhan kontrol tertentu seperti pada sebuah penggerak motor. Read Only Memori (ROM) yang isinya tidak berubah meskipun IC kehilangan catu daya. Memori penyimpanan program dinamakan sebagai memori program. Random Access Memori (RAM) isinya akan langsung hilang ketika IC kehilangan catudaya yang dipakai untuk menyimpan data pada saat program bekerja. RAM yang dipakai untuk menyimpan data ini disebut sebagai memori data.
Mikrokontroler biasanya dilengkapi dengan UART (Universal Asychronous Receiver Transmitter) yaitu port serial komunikasi serial asinkron, USART (Universal Syncrhronous and Asyncrhronous Serial Receiver and Transmitter) yaitu port yang digunakan untuk komunikasi serial sinkron dan asinkron yang kecepatannya 16 kali lebih cepat dari UART, SPI (Serial Port Interface), SCI (Serial Communication Interface), Bus RC (Intergrated circuit Bus) merupakan 2 jalur yang terdapat 8 bit, CAN (Control Area Network) merupakan standart pengkabelan SAE (Society of Automatic Engineers).
UART atau Universal Asynchronous Receiver Transmitter adalah protokol komunikasi yang umum digunakan dalam pengiriman data serial antara device satu dengan yang lainnya. Sebagai contoh komunikasi antara sesama mikrokontroler atau mikrokontroler ke PC. Dalam pengiriman data, clock antara pengirim dan penerima harus sama karena paket data dikirim tiap bit mengandalkan clock tersebut. Inilah salah satu keuntungan model asynchronous dalam pengiriman data karena dengan hanya satu kabel transmisi maka data dapat dikirimkan. Berbeda dengan model synchronous yang terdapat pada protokol SPI (Serial Peripheral Interface) dan I2C (Inter-Integrated Circuit) karena protokol membutuhkan minimal dua kabel dalam transmisi data, yaitu transmisi clock dan data. Namun kelemahan model asynchronous adalah dalam hal kecepatannya dan jarak transmisi. Karena semakin cepat dan jauhnya jarak transmisi
membuat paket-paket bit data menjadi terdistorsi sehingga data yang dikirim atau diterima bisa mengalami error.
Komunikasi serial adalah komunikasi yang pengiriman datanya per-bit secara berurutan dan bergantian. Komunikasi ini mempunyai suatu kelebihan yaitu hanya membutuhkan satu jalur dan kabel yang sedikit dibandingkan dengan komunikasi paralel. Pada prinsipnya komunikasi serial merupakan komunikasi dimana pengiriman data dilakukan per bit sehingga lebih lambat dibandingkan komunikasi parallel, atau dengan kata lain komunikasi serial merupakan salah satu metode komunikasi data di mana hanya satu bit data yang dikirimkan melalui seuntai kabel pada suatu waktu tertentu.
Mikrokontroler saat ini sudah dikenal dan digunakan secara luas pada dunia industri. Banyak sekali penelitian atau proyek mahasiswa yang menggunakan berbagai versi mikrokontroler yang dapat dibeli dengan harga yang relative murah. Mikrokontroler saat ini merupakan chip utama pada hampir setiap peralatan elektronika canggih. Mikrokontroler AVR memiliki arsitektur RISC 8 bit, dimana semua instruksi dikemas dalam kode 16 bit (16 bit word) dan sebagian besar instruksi dieksekusi dalam satu siklus clock, berbeda dengan instruksi CS51 yang membutuhkan siklus 12 clock. AVR berteknologi RISC (Reduce Instruction Set Computing), sedangkan seri MCS51berteknologi CISC (Complex Instruction Set Computing). Secara umum, AVR dikelompokkan menjadi beberapa kelas, yaitu keluarga AT90Sxx, keluarga ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing – masing kelas adalah memori, peripheral dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama.
2.1.5.1. Fitur ATMega8535
Fitur-fitur yang dimiliki oleh mikrokontroler ATmega8535 adalah sebagai berikut: 1. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port D.
2. ADC internal sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. SRAM sebesar 512 byte.
6. Memori Flash sebesar 8 kb dengan kemampuan Read While Write. 7. Port antarmuka SPI
9. Antarmuka komparator analog. 10.Port USART untuk komunikasi serial.
11.Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
Keterangan:
a. Flash adalah suatu jenis Read Only Memory yang biasanya diisi dengan program hasil perencanaan, yang harus dijalankan oleh mikrokontroler.
b. RAM (Random Acces Memory) merupakan memori yang membantu CPU untuk penyimpanan data sementara dan pengolahan data ketika program sedang running. c. EEPROM (Electrically Erasable Programmable Read Only Memory) adalah
memori untuk penyimpanan data secara permanen oleh program yang sedang running.
d. Port I/O adalah kaki untuk jalur keluar atau masuk sinyal sebagai hasil keluaran ataupun masukan bagi program.
e. Timer adalah modul dalam hardware yang bekerja untuk menghitung waktu/pulsa.
f. UART (Universal Asynchronous Receive Transmit) adalah jalur komunikasi data khusus secara serial asynchronous.
g. PWM (Pulse Width Modulation) adalah fasilitas untuk membuat modulasi pulsa. h. ADC (Analog to Digital Converter) adalah fasilitas untuk dapat menerima sinyal
analog dalam range tertentu untuk kemudian dikonversi menjadi suatu nilai digital dalam range tertentu.
i. SPI (Serial Peripheral Interface) adalah jalur komunikasi data khusus secara serial secara serial synchronous.
j. ISP (In System Programming) adalah kemampuan khusus mikrokontroler untuk dapat diprogram langsung dalam sistem rangkaiannya dengan membutuhkan jumlah pin yang minimal.
2.1.5.2. Konfigurasi Pin ATMega 8535
Konfigurasi pin ATmega8535 dengan kemasan 40 pin DIP (Dual Inline Package) dapat dilihat pada gambar xxxxxx. Dari gambar di atas dapat dijelaskan fungsi dari masing-masing pin Atmega8535 sebagai berikut:
3. Port A (PortA0…PortA7) merupakan pin input/output dua arah dan pin masukan ADC.
4. Port B (PortB0…PortB7) merupakan pin input/output dua arah dan dan pin fungsi khusus, yaitu Timer/Counter, komparator Analog dan SPI.
5. Port C (PortC0…PortC7) merupakan pin input/output dua arah dan pin fungsi khusus, yaitu komparator analog dan Timer Oscillator.
6. Port D (PortD0…PortD7) merupakan pin input/output dua arah dan pin fungsi khusus, yaitu komparator analog dan interrupt eksternal serta komunikasi serial. 7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler, pada pin ini
selama lebih dari panjang pulsa minimum akan menghasilkan reset walaupun clock sedang berjalan. RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka sistem akan di-reset 8. XTAL1 merupakan Input penguat osilator inverting dan input pada rangkaian
operasi clock internal.
9. XTAL2 merupakan Output dari penguat osilator inverting.
10.AVCC merupakan pin masukan tegangan untuk ADC. Pin tegangan suplai untuk port A dan ADC. Pin ini harus dihubungkan ke Vcc walaupun ADC tidak digunakan, maka pin ini harus dihubungkan ke Vcc melalui low pass filter
11.AREFF merupakan pin masukan tegangan referensi ADC.
Adapun konfigurasi pin ATmega8535, seperti yang diperlihatkan pada gambar 2.8.
Berikut ini penjelasan mengenai konfigurasi pin ATMega8535 sebagai berikut : 1. Port A
Pin33 sampai dengan pin 40 merupakan pin dari port A. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus di-setting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang disesuaikan sebagai input, atau diisi 1 jika sebagai output.
2. Port B
Pin 1 sampai dengan pin 8 merupakan pin dari port B. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus di-setting terlebih dahulu sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port B juga memiliki fungsi-fungsi alternatif khusus, seperti yang dapat dilihat dalam tabel 2.1.
Tabel 2.1. Penjelasan pin pada port B
Pin Keterangan
PB.7 SCK (SPI Bus Serial Clock)
PB.6 VISO (SPI Bus Master Input/Slave Output) PB.5 VOSI (SPI Bus Master Output/Slave Input) PB.4 SS (SPI Slave Select Input)
PB.3 AIN1 (Analog Comparator Negative Input)OCC (Timer/Counter0 Output Compare Match Output)
PB.2 AIN0 (Analog Comparator Positive Input)INT2 (External Interrupt2 Input)
PB.1 T1 (Timer/Counter1 External Counter Input)
PB.0 T0 (Timer/Counter0 External Counter Input)XCK (JSART External Clock Input/Output)
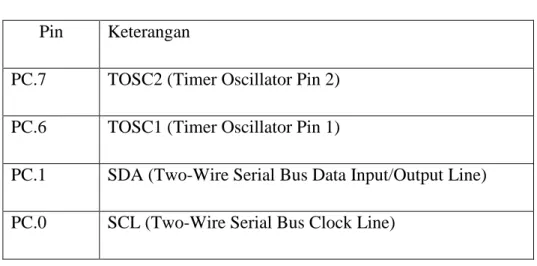
3. Port C
Pin 22 sampai dengan pin 29 merupakan pin dari port C. Port C sendiri merupakan port input atau output. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus di-setting terlebih dahulu sebelum port C digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port C juga memiliki fungsi-fungsi alternatif khusus, seperti yang dapat dilihat dalam tabel 2.2.
Tabel 2.2. Penjelasan pin pada port C
Pin Keterangan
PC.7 TOSC2 (Timer Oscillator Pin 2) PC.6 TOSC1 (Timer Oscillator Pin 1)
PC.1 SDA (Two-Wire Serial Bus Data Input/Output Line) PC.0 SCL (Two-Wire Serial Bus Clock Line)
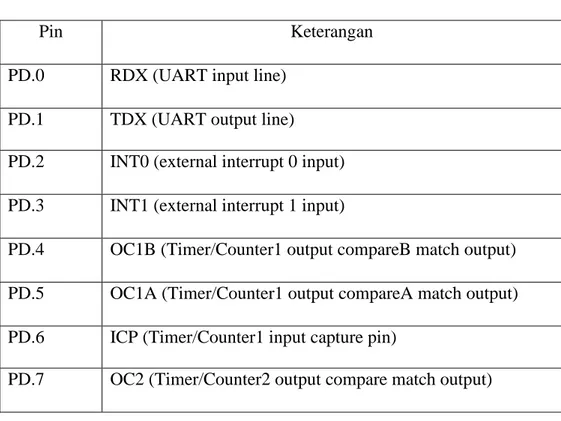
4. Port D
Pin 14 sampai dengan pin 20 merupakan pin dari port D. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur perx bit). Output buffer port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus di-setting terlebih dahulu sebelum port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel 2.3.
Tabel 2.3. Penjelasan pin pada port D
Pin Keterangan
PD.0 RDX (UART input line) PD.1 TDX (UART output line) PD.2 INT0 (external interrupt 0 input) PD.3 INT1 (external interrupt 1 input)
PD.4 OC1B (Timer/Counter1 output compareB match output) PD.5 OC1A (Timer/Counter1 output compareA match output) PD.6 ICP (Timer/Counter1 input capture pin)
PD.7 OC2 (Timer/Counter2 output compare match output)
2.1.5.3. Peta Memori ATMega 8535
ATMega8535 memiliki dua jenis memori yaitu Data Memori dan Program Memori ditambah satu fitur tambahan yaitu EEPROM Memori untuk penyimpan data.
1. Program Memori
ATMEGA 8535 memiliki On-Chip In-Sistem Reprogrammable Flash Memory untuk menyimpan program. Untuk alasan keamanan, program memori dibagi menjadi dua bagian, yaitu Boot Flash Section dan Application Flash Section. Boot Flash Section digunakan untuk menyimpan program Boot Loader, yaitu program yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan.
Application Flash Section digunakan untuk menyimpan program aplikasi yang dibuat user. AVR tidak dapat menjalakan program aplikasi ini sebelum menjalankan program Boot Loader. Besarnya memori Boot Flash Section dapat diprogram dari 128 word sampai 1024 word tergantung setting pada konfigurasi bit di register BOOTSZ. Jika Boot Loader diproteksi, maka program pada Application Flash Section juga sudah aman. Adapun peta memori ATmega8535 dapat diperlihatkan pada gambar 2.9.
2. Data Memori
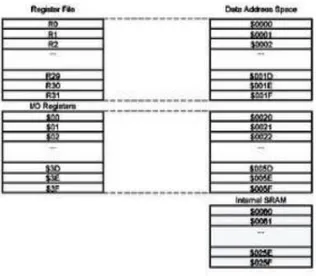
Gambar 2.10. menunjukkan peta memori SRAM pada ATMEGA 8535. Terdapat 608 lokasi address data memori. 96 lokasi address digunakan untuk Register File dan I/O Memori sementara 512 lokasi address lainnya digunakan untuk internal data SRAM. Register file terdiri dari 32 general purpose working register, I/O register terdiri dari 64 register.
Gambar 2.10. Peta Memori Data
3. EEPROM Data Memori
ATMEGA 8535 memiliki EEPROM 8 bit sebesar 512 byte untuk menyimpan data. Loaksinya terpisah dengan sistem address register, data register dan control register yang dibuat khusus untuk EEPROM. Alamat EEPROM dimulai dari $000 sampai $1FF. Peta eprom dapat dilihat pada gambar 2.11.
Gambar 2.11. EEPROM Data Memori
2.1.5.4. Status Register (SREG) ATMega8535
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler. Gambar 2.12 menunjukkan status register atmega8535.
Gambar 2.12. Status Register ATMega 8535
1. Bit 7-I : Global Interrupt Enable
Bit harus diset untuk meng-enable interupsi. Setelah itu anda dapat mengaktifkan interupsi mana yang akan digunakan dengan cara meng-enable bit kontrol register yang bersangkutan secara individu. Bit akan di-clear apabila terjadi suatu interupsi yang dipicu oleh hardware, dan bit tidak akan mengizinkan terjadinya interupsi, serta akan diset kembali oleh instruksi RETI.
2. Bit 6-T : Bit Copy Storage
Instruksi BLD dan BST menggunakan bit-T sebagai sumber atau tujuan dalam operasi bit. Suatu bit dalam sebuah register GPR dapat disalin ke bit T menggunakan instruksi BTS, dan sebaliknya bit-T dapat disalin kembali ke suatu bit dalam register GPR menggunakan instruksi BDL.
3. Bit 5-H : half Carry Flag 4. Bit 4-S : Sigh Bit
Bit-S merupakan hasil operasi EOR antara Flag-N (negatif) dan flag V (komplemen dua overflow).
5. Bit 3-V : Two’s Complement Overflow Flag Bit berguna untuk mendukung operasi aritmatika. 6. Bit 2-N : Negative Flag
Apabila suatu operasi menghasilkan bilangan negatif, maka flag-N akan di-set. 7. Bit 1-Z : Zero Flag
Bit akan di-set bila hasil operasi yang diperoleh adalah nol. 8. Bit 0-C : Carry Flag
Apabila suatu operasi menghasilkan carry, maka bit akan di-set.
Port I/O pada mikrokontroler ATMega8535 dapat difungsikan sebagai input ataupun dengan keluaran high atau low. Untuk mengatur fungsi port I/O sebagai input ataupun output perlu dilakukan setting pada DDR dan Port. Logika port I/O dapat berubah-ubah dalam program secara byte atau hanya bit tertentu. Mengubah sebuah keluaran bit I/O dapat dilakukan menggunakan perintah cbi (clear bit I/O) untuk menghasilkan output low atau perintah sbi (set bit I/O) untuk menghasilkan output high. Perubahan secara byte dilakukan dengan perintah in atau out yang menggunakan register bantu.
2.1.6. Tactile Push Button
Push button switch (saklar tombol tekan) adalah perangkat / saklar sederhana yang berfungsi untuk menghubungkan atau memutuskan aliran arus listrik dengan sistem kerja tekan unlock (tidak mengunci). Sistem kerja unlock disini berarti saklar akan bekerja sebagai device penghubung atau pemutus aliran arus listrik saat tombol ditekan, dan saat tombol tidak ditekan (dilepas), maka saklar akan kembali pada kondisi normal. Bentuk fisik push button dapat dilihat pada gambar 2.13.
Gambar 2.13. Bentuk Fisik Push Button Switch
Sebagai device penghubung atau pemutus, push button switch hanya memiliki 2 kondisi, yaitu On dan Off (1 dan 0). Istilah On dan Off ini menjadi sangat penting karena semua perangkat listrik yang memerlukan sumber energi listrik pasti membutuhkan kondisi On dan Off.
Karena sistem kerjanya yang unlock dan langsung berhubungan dengan operator, push button switch menjadi device paling utama yang biasa digunakan untuk memulai dan mengakhiri kerja mesin di industri. Secanggih apapun sebuah mesin bisa dipastikan sistem kerjanya tidak terlepas dari keberadaan sebuah saklar seperti push button switch atau perangkat lain yang sejenis yang bekerja mengatur pengkondisian On dan Off.
2.1.7. Water Pump
Di dalam penelitian ini water pump merupakan salah satu bagian yang sangat vital fungsinya karena merupakan komponen utama dalam proses pengisian cairan. Water pump digunakan untuk mengambil cairan dari dalam sumber cairan melalui selang. Water pump bekerja secara otomatis sesuai dengan keadaan relay. Bila relay dalam keadaan menyambung maka water pump secara otomatis akan hidup, dan apabila relay dalam keadaan memutus maka pompa akan mati. Pompa ini dialiri arus AC 220V. Bentuk fisik water pump dapat dilihat pada gambar 2.14.
Gambar 2.14. Bentuk Fisik Water Pump
2.1.8. LCD ( Liquid Crystal Display )
LCD (liquid crystal display) merupakan suatu alat yang dapat menampilkan karakter ASCI sehingga kita bisa menampilkan campuran huruf dan angka sekaligus. LCD didalamnya terdapat sebuah mikroprosesor yang mengendalikan tampilan, kita hanya perlu membuat program untuk berkomunikasi. Bentuk fisik LCD dapat dilihat pada gambar 2.15.
Gambar 2.15. Bentuk Fisik LCD
Adapun konfigurasi dan deskripsi dari pin-pin LCD antara lain: a. VCC (Pin 1)
Merupakan sumber tegangan +5V. b. GND 0V (Pin 2)
Merupakan sambungan ground. c. VEE (Pin 3)
Merupakan input tegangan Kontras LCD. d. RS Register Select (Pin 4)
Merupakan Register pilihan 0 = Register Perintah, 1 = Register Data. e. R/W (Pin 5)
Merupakan read select, 1 = read, 0 = write. f. Enable Clock LCD (Pin 6)
Merupakan masukan logika 1 setiap kali pengiriman atau pembacaan data. g. D0 – D7 (Pin 7 – Pin 14)
Merupakan Data Bus 1 -7. h. Anoda ( Pin 15)
Merupakan masukan tegangan positif backlight. i. Katoda (Pin 16)
Merupakan masukan tegangan negatif backlight.
Display karakter pada LCD diatur oleh pin EN, RS dan RW. Jalur EN dinamakan Enable. Jalur ini digunakan untuk memberitahu LCD bahwa sebuah data sedang dikirimkan. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat logika low “0” dan set pada dua jalur kontrol yang lain RS dan RW. Ketika dua jalur yang lain telah siap, set EN dengan logika “1” dan tunggu dan berikutnya di set.
2.1.9. Relay
Relay adalah komponen elektronika berupa saklar elektronik yang digerakkan oleh arus listrik. Secara prinsip, relay merupakan tuas saklar dengan lilitan kawat pada batang besi (solenoid) di dekatnya. Ketika solenoid dialiri arus listrik, tuas akan tertarik karena adanya gaya magnet yang terjadi pada solenoid sehingga kontak saklar akan menutup. Pada saat arus dihentikan, gaya magnet akan hilang, tuas akan kembali ke posisi semula dan kontak saklar kembali terbuka. Relay biasanya digunakan untuk menggerakkan arus/tegangan yang besar (misalnya peralatan listrik 4 ampere AC 220 V) dengan memakai arus/tegangan yang kecil (misalnya 0.1 ampere 12 Volt DC). Dalam pemakaiannya biasanya relay yang digerakkan dengan arus DC dilengkapi dengan sebuah dioda yang di-paralel dengan lilitannya dan dipasang terbalik yaitu anoda pada tegangan (-) dan katoda pada tegangan (+). Ini bertujuan untuk mengantisipasi sentakan listrik yang terjadi pada saat relay berganti posisi dari on ke off agar tidak merusak komponen di sekitarnya.
Penggunaan relay perlu memperhatikan tegangan pengontrolnya serta kekuatan relay men-switch arus/tegangan. Biasanya ukurannya tertera pada body relay. Misalnya relay 12VDC/4 A 220V, artinya tegangan yang diperlukan sebagai pengontrolnya adalah 12Volt DC dan mampu men-switch arus listrik (maksimal) sebesar 4 ampere pada tegangan 220 Volt. Sebaiknya relay difungsikan 80% saja dari kemampuan maksimalnya agar aman, lebih rendah lagi lebih aman. Relay jenis lain ada yang namanya reedswitch atau relay lidi. Relay jenis ini berupa batang kontak terbuat dari besi pada tabung kaca kecil yang dililitin kawat. Pada saat lilitan kawat dialiri arus, kontak besi tersebut akan menjadi magnet dan saling menempel sehingga menjadi saklar yang on. Ketika arus pada lilitan dihentikan medan magnet hilang dan kontak kembali terbuka (off).
Kontak penghubung relay terdiri dari dua bagian, yaitu : a. Kontak NC (Normally Close)
Kontak penghubung dalam kondisi menutup atau terhubung bila relay tidak mendapat masukan tegangan pada kumparannya. Tetapi bila diberi tegangan yang mencukupi pada kumparannya maka kontak penghubung menjadi terbuka.
b. Kontak NO (Normally Open)
Kontak penghubung dalam kondisi terbuka bila relay tidak mendapat tegangan pada kumparannya. Tetapi bila diberi tegangan yang mencukupi pada kumparannya maka kontak penghubung menjadi tertutup.
2.2. Perangkat Lunak (Software)
2.2.1. Bahasa Pemrograman Mikrokontroler
Pengembangan sebuah sistem menggunakan mikrokontroler AVR buatan ATMEL menggunakan software AVR STUDIO dan CodeVisionAVR. AVR STUDIO merupakan software yang digunakan untuk bahasa assembly yang mempunyai fungsi yang sangat lengkap, yaitu digunakan untuk menulis program, kompilasi, simulasi dan download program ke IC mikrokontroler AVR. Sedangkan CodeVisionAVR merupakan software C-cross Compiler, dimana program dapat ditulis dalam bahasa C, CodeVision memiliki IDE (Integrated development Environment) yang lengkap, dimana penulisan program, compile,link, pembuatan kode mesin (assembler) dan download program ke chip AVR dapat dilakukan dengan CodeVision, selain itu ada fasilitas terminal, yaitu melakukan komunikasi serial dengan mikrokontroler yang sudah di program. Proses download program ke IC mikrokontroler AVR dapat menggunakan System
programmable Flash on-Chip mengizinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI.
2.2.2. CodevisionAVR
CodeVisionAVR merupakan sebuah cross-compiler C, Integrated Development Environtment (IDE), dan Automatic Program Generator yang didesain untuk mikrokontroler buatan Atmel seri AVR. CodeVisionAVR dapat dijalankan pada sistem operasi Windows 95, 98, Me, NT4, 2000, dan XP. Cross-compiler C mampu menerjemahkan hampir semua perintah dari bahasa ANSI C, sejauh yang diijinkan oleh arsitektur dari AVR, dengan tambahan beberapa fitur untuk mengambil kelebihan khusus dari arsitektur AVR dan kebutuhan pada sistem embedded.
File object COFF hasil kompilasi dapat digunakan untuk keperluan debugging pada tingkatan C, dengan pengamatan variabel, menggunakan debugger Atmel AVR Studio. IDE mempunyai fasilitas internal berupa software AVR Chip In-System Programmer yang memungkinkan Anda untuk melakukan transfer program kedalam chip mikrokontroler setelah sukses melakukan kompilasi/asembli secara otomatis. Software In-System Programmer didesain untuk bekerja dengan Atmel STK500/AVRISP/AVRProg, Kanda Systems STK200+/300, Dontronics DT006, Vogel Elektronik VTEC-ISP, Futurlec JRAVR dan MicroTronics ATCPU/Mega2000 programmers/development boards.
Untuk keperluan debugging sistem embedded, yang menggunakan komunikasi serial, IDE mempunyai fasilitas internal berupa sebuah Terminal. Selain library standar C, CodeVisionAVR juga mempunyai library tertentu untuk:
a. Modul LCD alphanumeric b. Bus I2C dari Philips
c. Sensor Suhu LM75 dari National Semiconductor
d. Real-Time Clock: PCF8563, PCF8583 dari Philips, DS1302 dan DS1307 dari Maxim/Dallas Semiconductor
e. Protokol 1-Wire dari Maxim/Dallas Semiconductor
f. Sensor Suhu DS1820, DS18S20, dan DS18B20 dari Maxim/Dallas Semiconductor g. Termometer/Termostat DS1621 dari Maxim/Dallas Semiconductor
h. EEPROM DS2430 dan DS2433 dari Maxim/Dallas Semiconductor i. SPI
k. Delay
l. Konversi ke Kode Gray
CodeVisionAVR juga mempunyai Automatic Program Generator bernama CodeWizardAVR, yang mengujinkan Anda untuk menulis, dalam hitungan menit, semua instruksi yang diperlukan untuk membuat fungsi-fungsi berikut:
a. Set-up akses memori eksternal b. Identifikasi sumber reset untuk chip c. Inisialisasi port input/output
d. Inisialisasi interupsi eksternal e. Inisialisasi Timer/Counter f. Inisialisasi Watchdog-Timer
g. Inisialisasi UART (USART) dan komunikasi serial berbasis buffer yang digerakkan oleh interupsi
h. Inisialisasi Pembanding Analog i. Inisialisasi ADC
j. Inisialisasi Antarmuka SPI k. Inisialisasi Antarmuka Two-Wire l. Inisialisasi Antarmuka CAN
m. Inisialisasi Bus I2C, Sensor Suhu LM75, Thermometer/Thermostat DS1621 dan Real-Time Clock PCF8563, PCF8583, DS1302, dan DS1307
n. Inisialisasi Bus 1-Wire dan Sensor Suhu DS1820, DS18S20 o. Inisialisasi modul LCD