7
BAB II DASAR TEORI
2.1 Hexacopter
Multirotor adalah salah satu jenis kendaraan udara tanpa awak yang dapat dikendalikan dengan jarak jauh baik secara manual maupun autonomous.
Hexacopter merupakan jenis multirotor yang menggunakan enam buah motor terpasang pada masing masing lengan (Artale, Milazzo, & Ricciardello, 2013).
Pergerakan motor hexacopter terbagi menjadi dua, yaitu tiga buah motor bergerak searah jarum jam dan tiga buah lainnya bergerak berlawanan dengan arah jarum jam seperti yang ditunjukkan pada Gambar 2.1. Gerakan hexacopter secara umum terbagi menjadi dua yaitu gerak translasi dan gerak rotasi. Gerak translasi dengan tiga sumbu X, Y, dan Z yang ditunjukkan pada gambar dengan notasi x-axis, y- axis dan z-axis. Sedangkan, gerak rotasi roll, pitch dan yaw dengan sumbu X, Y dan Z (Artale, Milazzo, & Ricciardello, 2013).
T5 T6
T2
T1 T3
T4
Sumbu Y Sumbu Y Sumbu Z
l
Gambar 2. 1 Bentuk hexacopter (Artale, Milazzo, & Ricciardello, 2013) T1, T2, T3, T4, T5, dan T6 menunjukkan thrust atau gaya dorong yang dihasilkan oleh motor 1-6. Panjang masing masing lengan hexacopter ditunjukkan
8
oleh l, sedangkan , , dan adalah sudut roll, pitch, dan yaw. (Artale, Milazzo, & Ricciardello, 2013).
2.2 Propeller
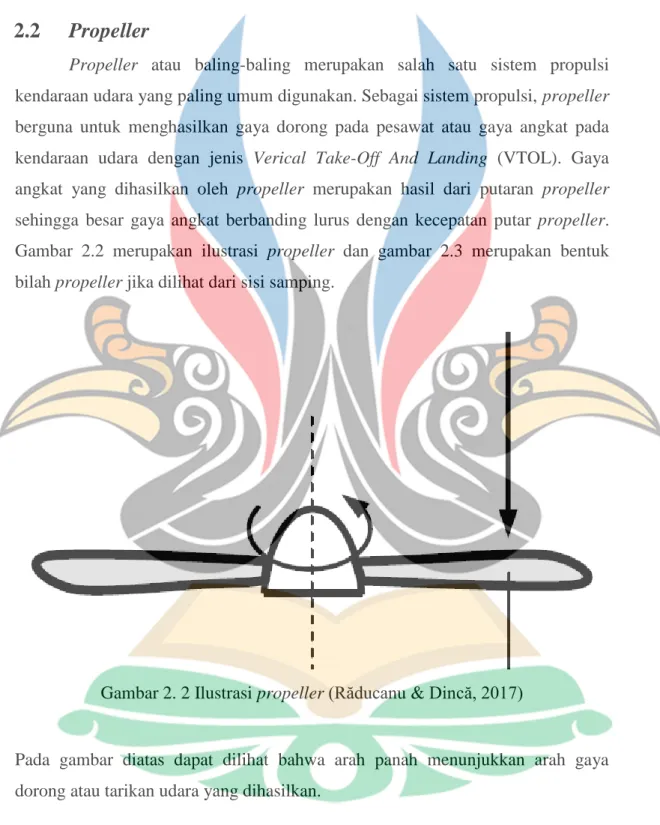
Propeller atau baling-baling merupakan salah satu sistem propulsi kendaraan udara yang paling umum digunakan. Sebagai sistem propulsi, propeller berguna untuk menghasilkan gaya dorong pada pesawat atau gaya angkat pada kendaraan udara dengan jenis Verical Take-Off And Landing (VTOL). Gaya angkat yang dihasilkan oleh propeller merupakan hasil dari putaran propeller sehingga besar gaya angkat berbanding lurus dengan kecepatan putar propeller.
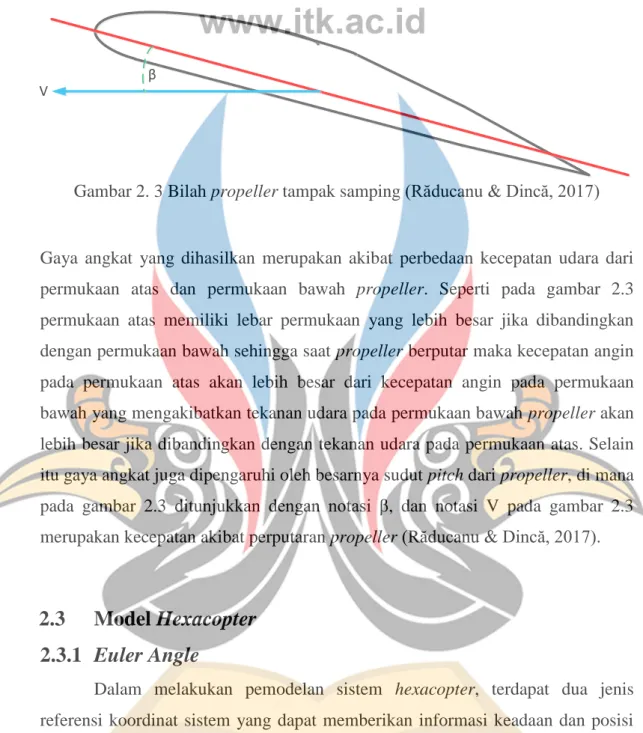
Gambar 2.2 merupakan ilustrasi propeller dan gambar 2.3 merupakan bentuk bilah propeller jika dilihat dari sisi samping.
Gambar 2. 2 Ilustrasi propeller (Răducanu & Dincă, 2017)
Pada gambar diatas dapat dilihat bahwa arah panah menunjukkan arah gaya dorong atau tarikan udara yang dihasilkan.
9
V
β
Gambar 2. 3 Bilah propeller tampak samping (Răducanu & Dincă, 2017)
Gaya angkat yang dihasilkan merupakan akibat perbedaan kecepatan udara dari permukaan atas dan permukaan bawah propeller. Seperti pada gambar 2.3 permukaan atas memiliki lebar permukaan yang lebih besar jika dibandingkan dengan permukaan bawah sehingga saat propeller berputar maka kecepatan angin pada permukaan atas akan lebih besar dari kecepatan angin pada permukaan bawah yang mengakibatkan tekanan udara pada permukaan bawah propeller akan lebih besar jika dibandingkan dengan tekanan udara pada permukaan atas. Selain itu gaya angkat juga dipengaruhi oleh besarnya sudut pitch dari propeller, di mana pada gambar 2.3 ditunjukkan dengan notasi β, dan notasi V pada gambar 2.3 merupakan kecepatan akibat perputaran propeller (Răducanu & Dincă, 2017).
2.3 Model Hexacopter 2.3.1 Euler Angle
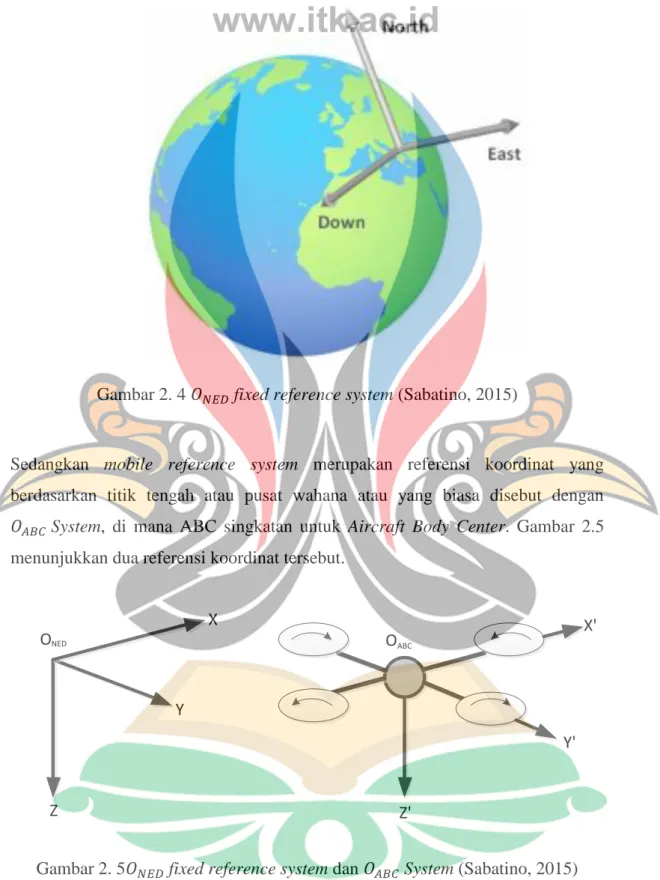
Dalam melakukan pemodelan sistem hexacopter, terdapat dua jenis referensi koordinat sistem yang dapat memberikan informasi keadaan dan posisi hexacopter yaitu fixed reference system atau inertial frame dan mobile reference system atau body frame. Fixed reference system merupakan referensi koordinat bumi atau dikenal sebagai fixed reference system, di mana NED merupakan singkatan untuk North-East-Down yang dapat dilihat pada gambar 2.4.
10
Gambar 2. 4 fixed reference system (Sabatino, 2015)
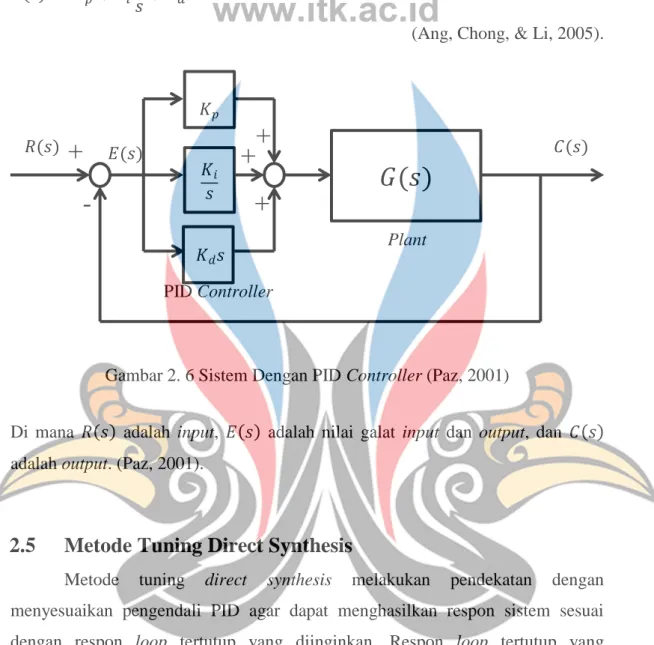
Sedangkan mobile reference system merupakan referensi koordinat yang berdasarkan titik tengah atau pusat wahana atau yang biasa disebut dengan
System, di mana ABC singkatan untuk Aircraft Body Center. Gambar 2.5 menunjukkan dua referensi koordinat tersebut.
ONED OABC
X
Y
Z
X'
Y'
Z'
Gambar 2. 5 fixed reference system dan System (Sabatino, 2015)
Euler angle merupakan tiga buah sudut yang diperkenalkan pertama kali oleh Leonhard Euler untuk menderskirpsikan sudut koordinat dari suatu benda
11 tegar. Tiga sudut XYZ euler angles dinotasikan sebagai sudut , , dan Euler angles tersebut merepresentasikan rangkaian elemen sudut rotasi terhadap suatu referensi koordinat, di mana sudut rotasi dari referensi koordinat yang lain dapat dicari dengan menggunakan kombinasi dari tiga sudut rotasi yang berupa matriks rotasi ( ), ( ), dan ( ) seperti berikut:
( ) [ ( ) ( )
( ) ( ) ] (2.1)
( ) [ ( ) ( )
( ) ( )] (2.2)
( ) [ ( ) ( )
( ) ( ) ] (2.3)
Di mana = = , sehingga inertial frame dan body frame dapat dihubungkan dengan matriks ( ).
( ) ( ) ( ) ( ) (2.4)
[
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
]
(2.5)
(Sabatino, 2015).
2.3.2 Model Matematika Hexacopter
Sebut saja , - adalah vektor yang berisi posisi linear dan angular hexacopter terhadap inertial frame, dan , - adalah vektor yang berisi kecepatan linear dan angular hexacopter terhadap body frame.
Sehingga hubungan kedua reference frame dapat ditulis dengan persamaan berikut:
(2.6)
(2.7)
12
Di mana , ̇ ̇ ̇- adalah kecepatan linear pada global frame [ ̇ ̇ ̇] adalah kecepatan angular pada global frame, , - adalah kecepatan linear pada body frame, , - adalah kecepatan angular pada body frame, dan T adalah matriks transformasi untuk sudut angular seperti persamaan berikut:
[
( ) ( ) ( ) ( )
( ) ( )
( ) ( )
( ) ( ) ]
(2.8)
,
Di mana ( ) ( ) Sehingga model kinematika dari hexacopter adalah,
{
̇ , ( ) ( ) ( ) ( ) ( )- , ( ) ( ) ( ) ( ) ( )- , ( ) ( )- ̇ , ( ) ( ) ( ) ( ) ( )- , ( ) ( ) ( ) ( ) ( )- , ( ) ( )- ̇ , ( ) ( )- , ( ) ( )- , ( )- ̇ , ( ) ( )- , ( ) ( )- ̇ , ( )- , ( )- ̇ * ( )
( )+ * ( )
( )+ ( )
Berdasarkan hukum newton, maka total gaya yang bekerja pada hexacopter adalah,
( ̇ ) (2.10)
Di mana adalah massa hexacopter, ^ adalah perkalian cross dan [ ] adalah gaya total pada tiga sumbu. Persamaan euler memberikan total torsi yang diaplikasikan kepada hexacopter seperti persamaan 2.11.
̇ ( ) (2.11)
Di mana [ ] adalah total torsi dan I adalah matriks inersia diagonal seperti berikut:
13 [ ]
(2.12)
Sehingga model dinamis dari pada frame hexacopter adalah,
{
( ̇ ) ( ̇ ) ( ̇ ) ̇ ̇ ̇
(2.13)
(Sabatino, 2015).
2.3.3 Gaya dan Momen
Gaya eksternal terhadap frame wahana dilambangkan dengan persamaan,
̂ ̂ (2.14)
Di mana ̂ adalah unit vektor inersia pada sumbu z, ̂ adalah unit vektor frame terhadap sumbu z, adalah percepatan gravitasi bumi, adalah gaya dorong total yang dihasilkan rotor, dan [ ] adalah gaya yang dihasilkan oleh angin wahana. Momen eksternal pada frame wahana dapat diperlihatkan pada persamaan 2.15.
(2.15)
Di mana merepresentasikan momen gyroscopic yang diakibatkan oleh rotasi gabungan dari keenam rotor dan frame wahana, [ ] adalah torsi kontrol yang dihasilkan oleh kecepatan motor yang berbeda dan [ ] adalah torsi yang dihasilkan oleh angin dari wahana.
Dikarenakan nilai sangatlah kecil, maka momen gyroscopic dapat diabaikan.
Untuk menyelesaikan model dinamis dari frame body hexacopter, persamaan
14
tersebut didapatkan dengan mensubtitusikan efek dari gaya dan torsi ke dalam persamaan 2.13 sehingga didapatkan,
{
, ( )- ( ̇ ) , ( ) ( )- ( ̇ ) , ( ) ( )- ( ̇ ) ̇ ̇ ̇
(2.16)
(Sabatino, 2015).
2.3.4 Aktuator Hexacopter
Input gaya dan momen untuk mengendalikan hexacopter merupakan hasil dari gerakan memutar dari keenam motor. Gerakan terhadap tiga sumbu ZYX merupakan pengaruh dari gaya vertikal thrust motor dan efek dari putaran motor dan propeller. Berdasarkan struktur geometri dari hexacopter, maka thrust total dan torsi terhadap ketiga sumbu dapat diperoleh melalui persamaan berikut:
{
( )
( ) ( ) ( )
(2.17)
di mana adalah panjang jarak antara setiap motor terhadap titik tengah hexacopter, adalah drag factor, adalah thrust motor ke-n, adalah putaran motor ke-n dalam radian per detik, dan adalah inersia motor dan propeller.
(Artale, Milazzo, & Ricciardello, 2013).
2.3.5 Model State Space
Vektor State dilambangkan pada persamaan berikut:
15 , - (2.18)
Persamaan 2.9 dan 2.16 dapat dibuat menjadi fungsi state-space sehingga didapatkanlah,
{
̇ , ( ) ( )- , ( ) ( )- ̇ , ( )- , ( )- ̇ * ( )
( )+ * ( )
( )+ ̇
̇
̇
̇ , ( )- ̇ , ( ) ( )- , ( ) ( )- ̇
̇ , ( ) ( ) ( ) ( ) ( )- , ( ) ( ) ( ) ( ) ( )- , ( ) ( )- ̇ , ( ) ( ) ( ) ( ) ( )- , ( ) ( ) ( ) ( ) ( )- , ( ) ( )- ̇ , ( ) ( )- , ( ) ( )- , ( )-
(2.19) Dibawah ini kita mendapatkan dua bentuk alternatif dari model dinamis yang berguna untuk mempelajari pengendaliannya. Dengan menggunakan hukum Newton dapat dituliskan persamaan,
̇ ̂ ̂ (2.20)
sehingga,
16 {
̈ , ( ) ( ) ( ) ( ) ( )- ̈ , ( ) ( ) ( ) ( ) ( )- ̈ , ( ) ( )-
(2.21)
Maka penyederhanaan dapat dilakukan dengan membuat [ ̇ ̇ ̇] , - . Asumsi ini dikatakan benar untuk sudut pergerakan kecil. Maka model dinamis hexacopter pada frame inersianya adalah,
{
̈ , ( ) ( ) ( ) ( ) ( )- ̈ , ( ) ( ) ( ) ( ) ( )- ̈ , ( ) ( )- ̈
̇ ̇ ̈
̇ ̇ ̈
̇ ̇
(2.22)
Mendefinisikan ulang vektor state-space sebagai,
, ̇ ̇ ̇ - (2.23)
Sehingga dimungkinkan menuliskan persamaan dari state-space dari hexacopter seperti berikut:
̇ ( ) ∑ ( )
(2.24)
di mana,
17 ( )
[
̇ ̇ ( ) ̇
( ) ( ) ( ) , ( )- , ( )- , ( ) ( )- , ( ) ( )-
]
(2.25)
dan,
( ) [ ] ( ) * +
( ) [ ] ( ) , -
(2.26)
dengan,
, ( ) ( )-
, ( ) ( ) ( ) ( ) ( ) , ( ) ( ) ( ) ( ) ( )
(2.27)
(Sabatino, 2015).
18
2.3.6 Model Linear
Dituliskan adalah sebuah vektor kontrol di mana [ ] . Proses linierisasi dikembangkan pada titik equilibrium ̅, yang digunakan untuk memperbaiki input ̅ sebagai solusi sistem aljabar. Nilai dari vektor state-space yang digunakan untuk memperbaiki input konstan pada sislem aljabar adalah,
̂( ̅ ̅) (2.28)
Dikarenakan fungsi ̂ tidak linear, permasalahan berkaitan dengan adanya keunikan solusi dari sistem muncul. Khususnya untuk sistem yang ada di mana solusi sulit ditemukan pada bentuk loop tertutup dikarenakan fungsi trigonometri yang tidak berhubungan satu dengan lain. Oleh karena itu linierisasi dilakukan kepada model yang disederhanakan dengan menganggap bahwa osilasi atau gerakan hexacopter yang kecil. Sistem yang didapatkan dideskripsikan dengan persamaan berikut:
{
̇ ̇ ̇
̇
̇
̇
̇ ̇ ̇
̇ ( ) ( ) ̇ ( ) ( ) ̇
(2.29)
di mana dapat juga ditulis dengan,
19
̇ ( ). (2.30)
Seperti yang dijelaskan sebelumnya, untuk melakukan linierisasi dibutuhkan titik equilibrium. Titik tersebut adalah,
̅ , ̅ ̅ ̅- . (2.31)
Dari persamaan tersebut kita dapat mencari titik equilibrium pada persamaan diatas dengan nilai input konstan,
̅ , - . (2.32)
Perlu diingat bahwa nilai khusus ini merepresentasikan gaya yang dibutuhkan untuk menghilangkan berat dari wahana dan membuatnya hovering. Setelah ditentukan titik equilibrium ̅ dan input ̅ yang bersangkutan, kita mendapatkan matriks yang berhubungan dengan sistem linear yang ditunjukan seperti berikut:
( )
| ̅ ̅
[
]
(2.33)
20
( )
| ̅ ̅
[
]
(2.34)
jika gangguan angin dianggap tidak ada maka,
[ ] , - (2.35)
( )
| ̅ ̅
[
]
(2.36)
model liniernya adalah,
̇ (2.37)
21 {
̇ ̇ ̇ ̇
̇
̇
̇ ̇ ̇
̇ ̇ ̇
(2.38)
(Sabatino, 2015).
2.4 Proportional Integral Derivative (PID)
Pengendali PID merupakan cara termudah dan paling banyak digunakan dalam permasalahan pengendalian suatu sistem. Lebih dari 90% industri di dunia masih menggunakan PID sebagai pengendali suatu sistem, khususnya sistem dengan orde rendah (Ang, Chong, & Li, 2005).
Bentuk standar dari pengendali PID juga dikenal sebagai ‘three term controller’ yang biasa diaplikasikan secara paralel seperti pada Gambar 2.2 dan dapat dituliskan dalam fungsi waktu sebagai berikut:
( ) ( ) ∫ ( )
(2.39)
Di mana ( ) keluaran PID, adalah proportional gain, adalah integral gain, adalah derivative gain, dan adalah waktu (detik). Dari persamaan diatas, bentuk PID dapat diubah menjadi fungsi alih laplace seperti berikut:
22
( ) (2.40)
(Ang, Chong, & Li, 2005).
Gambar 2. 6 Sistem Dengan PID Controller (Paz, 2001)
Di mana ( ) adalah input, ( ) adalah nilai galat input dan output, dan ( ) adalah output. (Paz, 2001).
2.5 Metode Tuning Direct Synthesis
Metode tuning direct synthesis melakukan pendekatan dengan menyesuaikan pengendali PID agar dapat menghasilkan respon sistem sesuai dengan respon loop tertutup yang diinginkan. Respon loop tertutup yang diinginkan ini merupakan respon sistem dengan nilai time delay yang kecil sesuai dengan keinginan pengguna (Jeng, 2015).
Fungsi alih loop tertutup sistem dengan controller pada Gambar 2.3 dapat dituliskan sebagai berikut:
( )
( )
(2.41)
Di mana merupakan fungsi alih controller, dan adalah fungsi alih sistem (Jeng, 2015).
𝑅(𝑠)
+
+ -
+
+ 𝐺(𝑠)
𝐾𝑝
𝐾𝑖 𝑠
𝐾𝑑𝑠 PID Controller
Plant
𝐶(𝑠) 𝐸(𝑠)
23 Jika fungsi alih respon loop tertutup yang diinginkan dituliskan dengan , dan hasil keluaran sistem dengan controller adalah sama dengan respon loop tertutup yang diinginkan, maka dapat ditulis dengan persamaan,
( ) ( )
(2.42)
(2.43)
sehingga persamaan controller menjadi,
( ) (2.44)
(Jeng, 2015).
2.6 Rain-Fall Optimization Algorithm (RFO)
RFO merupakan metode pendekatan yang terinspirasi dari tingkah alam yaitu air hujan yang dikembangkan untuk memecahkan masalah optimasi. Metode ini dikembangkan dengan tujuan untuk menemukan suatu metode yang lebih sederhana dan efektif sehingga dapat memecahkan permasalahan dengan lebih cepat dan akurat. Metode ini mampu untuk menemukan solusi terbaik dari semesta yang luas dengan waktu yang cepat (Encina, L´opez, & Rubio, 2019).
Algoritma ini dimulai dengan melakukan inisialisasi populasi awal (raindrops). Pada filosofinya raindrop merupakan sebuah partikel dalam sebuah populasi, partikel ini berupa vektor yang mengandung variabel solusi dari
𝐶(𝑠)
-
+
𝐺𝑐 𝐺𝑝𝑅(𝑠)
Gambar 2. 7 Sistem Loop Tertutup Dengan Controller (Jung, Song, &
Hyun, 1999)
24
permasalahan optimisasi. Jika merupakan ukuran populasi dan merupakan nomor populasi, maka dapat diwakilkan dengan persamaan,
[ ] * + (2.45)
di mana,
: nomor atau dimensi variabel optimasi,
: variabel masalah atau solusi optimasi ke- dalam populasi ke- ,
: vektor air hujan atau populasi air hujan , di mana nilai anggota vektor dipilih secara acak dengan persamaan,
( ) (2.46)
di mana,
dan : batas bawah dan batas atas variabel, : fungsi acak,
Neighborhood : domain dengan radius untuk setiap variabel, neighborhood ini akan diperbarui setiap drop.
Neighbor point : titik didalam Neighborhood, dipilih secara acak selama proses optimasi. Neighbor point ke dari iterasi biasa ditulis sesuai dengan persamaan berikut:
‖( ) ̂‖ ‖ ̂‖
* + * + * +
( ),
(2.47)
di mana,
: vektor bilangan rill positif yang merepresentasikan ukuran Neighborhood dalam ruang N-dimensi, semakin besar elemennya, semakin besar ukuran Neighborhood.
: ukuran Neighborhood awal dan ( ) adalah fungsi untuk
25 menyesuaikan ukuran langkah, yaitu menyesuaikan ukuran Neighborhood untuk setiap iterasi.
: nomor dari neighbor point untuk digunakan selama proses perhitungan.
̂ : unit vektor dari dimensi ke-k.
Dominant drop : diantara semua neighbor point dari drop dengan adalah neighbor point dominan. Fungsi objektif disimbolkan dengan F dan hasil fungsi objektif untuk drop dan neighbor point dapat diperoleh melalui ( ) dan ( ).
di mana,
( ) ( )
( ) ( ) * + * +
(2.48)
Active drop : sebuah drop yang memiliki nilai neighbor point dominan.
Inactive drop : sebuah drop yang tidak memiliki nilai neighbor point dominan.
Explosion process (proses percikan) : akan dilakukan selama proses optimasi ketika tidak ada neighbor point dominan, ini karena jumlah neighbor point yang tidak mencukupi atau drop yang terjebak dalam domain pencarian sehingga tidak mencapai local best atau global best. Proses ini dilakukan sebanyak . Explosion process ( ( )) ini dapat dituliskan dalam persamaan,
( ( )) (2.49)
di mana,
: nomor neighbor point dalam kondisi normal (tanpa percikan).
: dasar percikan (mengindikasi jangkauan percikan) : penghitung percikan
raindrop’s rank (peringkat raindrop) : untuk setiap iterasi pada proses optimisasi, peringkat dari semua raindrop dihitung menggunakan persamaan berikut:
( )( ) ( )( ) ( )( )
26
( ) ( ) (2.50)
di mana,
: nilai absolut perubahan hasil fungsi objektif iterasi ke-t terhadap iterasi pertama untuk raindrop .
: hasil fungsi objektif pada iterasi ke-t untuk raindrop .
( ) dan ( ) : urutan C1 dan C2 saat sedang diurutkan dari terkecil ke yang terbesar.
dan : koefisien berat yang diasumsikan 0,5.
: peringkat dari raindrop pada iterasi ke-t.
Jika terdapat neighbor point yang dihasilkan diluar batas atas dan batas bawah, maka akan diperbarui menggunakan persamaan berikut:
( ) ( ) (2.51)
atau,
if ( ) then ( ) . (2.52)
(Kaboli, Selvaraj, & Rahim, 2016).
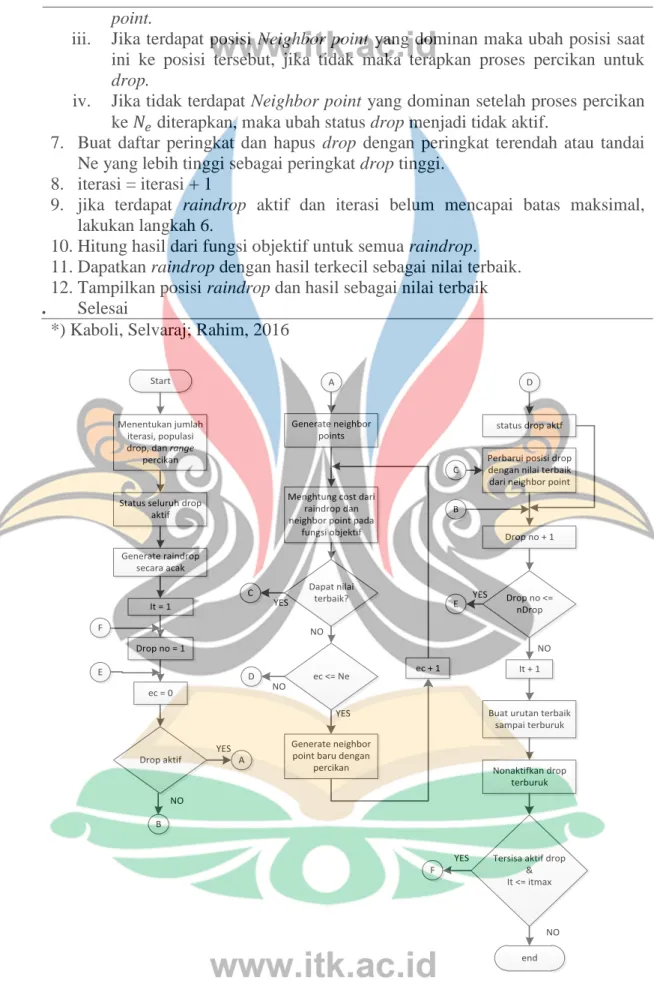
Algoritma ini dapat dilihat melalui pseudocode pada tabel 2.1 dan ilustrasi alur algoritma RFO ditampilkan pada gambar 2.6.
Tabel 2. 1 Pseudocode Algoritma RFO Pseudocode :
1. Mulai
2. Menentukan parameter berikut : i. : ukuran populasi
ii. : nomor Neighbor point untuk setiap drop.
iii. Maksimum iterasi
3. Melakukan inisialisasi populasi awal yang dilakukan secara random.
4. Iterasi = 1
5. Dengan setting awal, aktifkan semua status drop.
6. Jika status drop aktif maka lakukan langkah berikut untuk setiap drop yang aktif
i. Menentukan Neighbor point
ii. Mendapatkan hasil dari fungsi objektif dari setiap drop dan Neighbor
27 point.
iii. Jika terdapat posisi Neighbor point yang dominan maka ubah posisi saat ini ke posisi tersebut, jika tidak maka terapkan proses percikan untuk drop.
iv. Jika tidak terdapat Neighbor point yang dominan setelah proses percikan ke diterapkan, maka ubah status drop menjadi tidak aktif.
7. Buat daftar peringkat dan hapus drop dengan peringkat terendah atau tandai Ne yang lebih tinggi sebagai peringkat drop tinggi.
8. iterasi = iterasi + 1
9. jika terdapat raindrop aktif dan iterasi belum mencapai batas maksimal, lakukan langkah 6.
10. Hitung hasil dari fungsi objektif untuk semua raindrop.
11. Dapatkan raindrop dengan hasil terkecil sebagai nilai terbaik.
12. Tampilkan posisi raindrop dan hasil sebagai nilai terbaik 13. Selesai
*) Kaboli, Selvaraj; Rahim, 2016
Start
Menentukan jumlah iterasi, populasi drop, dan range
percikan
Status seluruh drop aktif
Generate raindrop secara acak
It = 1
Drop no = 1
ec = 0
Drop aktif
Generate neighbor points
Menghtung cost dari raindrop dan neighbor point pada
fungsi objektif
Dapat nilai terbaik?
ec <= Ne
Generate neighbor point baru dengan
percikan
ec + 1
status drop aktf
Perbarui posisi drop dengan nilai terbaik dari neighbor point
Drop no + 1
Drop no <=
nDrop
It + 1
Buat urutan terbaik sampai terburuk
Nonaktifkan drop terburuk
Tersisa aktif drop
&
It <= itmax
end YES
YES YES
YES
NO NO
NO NO
NO YES
B
A
A
B
D
D
C
C
E
E
F F
Gambar 2. 8 Flowchart algoritma RFO (Kaboli, Selvaraj, & Rahim, 2016).
28
2.7 Estimasi Posisi
Melakukan misi tracking waypoint memerlukan sebuah persamaan untuk mengestimasi posisi hexacopter terhadap sumbu X, dan Y. Untuk mendapatkan posisi x dan y maka dilakukan perhitungan estimasi posisi. Estimasi posisi meliputi kecepatan maju atau terhadap sumbu Y ( ), kecepatan kesamping terhadap sumbu X ( ) dan waktu ( ). Persamaan estimasi posisi x dan y ini dinyatakan dalam Persamaan (13) dan (14) di bawah ini:
( ) (2.53)
( ) (2.54)
di mana merupakan posisi terhadap sumbu-x ke- , posisi terhadap sumbu-y ke- , merupakan posisi terhadap sumbu-x sebelumnya, merupakan posisi terhadap sumbu-y sebelumnya, merupakan kecepatan translasi terhadap sumbu-x, merupakan kecepatan translasi terhadap sumbu-y, waktu saat posisi ke- dan merupakan waktu pada posisi sebelumnya (Indrawati, Prayitno, & Kusuma, 2015).
2.8 Momen Inersia
Momen inersia adalah ukuran kelebaman suatu benda terhadap gerak rotasinya. Besar momen inersia dari suatu benda dipengaruhi oleh massa dan jarang terhadap sumbu putarnya.
2.8.1 Momen Inersia Sumbu Paralel
Momen inersia suatu benda terlepas dari bentuknya adalah berbanding lurus dengan massa dan kuadrat jarak sumbu putarnya. Momen inersia suatu benda dapat ditulis dengan formula , di mana adalah konstanta yang belum diketahui. Sebagai contoh adalah sebuah batang homogen yang memliki panjang dan massa dan berdasarkan formula inersia maka momen inersia batang tersebut dapat ditulis menjadi ( ) . Berdasarkan teorema sumbu paralel, untuk mencari momen inersia batang homogen dengan
29 panjang dan massa dapat dicari menggunakan besar momen inersia dua buah batang kecil ( ) dengan panjang dan massa yang diputar pada ujungnya (Rojas, 2019) menggunakan prinsip sumbu paralel,
(2.55)
(Walker, Halliday, & Resnick, 2014).
Sehingga persamaan momen inersia dua batang kecil menjadi ( ⁄ ) . Karena batang yang lebih besar merupakan dua kali lipat dari batang kecil baik panjang maupun massanya, sehingga sehingga dapat ditulis dalam bentuk menjadi ( ⁄ ) . Berdasarkan bentuk dan sebelumnya, maka diperoleh nilai dan persamaan momen inersia batang homogen panjang menjadi (Rojas, 2019).
2.8.2 Momen Inersia Partikel
Momen inersia ( ) sebuah benda partikel yang memiliki masa yang berjarak terhadap sumbu rotasi adalah sebagai berikut:
(2.56)
(Walker, Halliday, & Resnick, 2014).
2.8.3 Momen Balok
Sebuah balok yang memiliki panjang , lebar , tinggi , dam massa yang diputar pada tiga buah sumbu putar dan memliki jarak antar pusat massa balok terhadap poros sumbu putar sebesar seperti gambar 2.7,
30
Gambar 2. 9 Balok dengan tiga sumbu putar (Bresciani, 2008)
memiliki besaran momen inersia ( ) yang dapat dihitung menggunakan persamaan berikut:
. / . / . /
(2.57) (Bresciani, 2008).
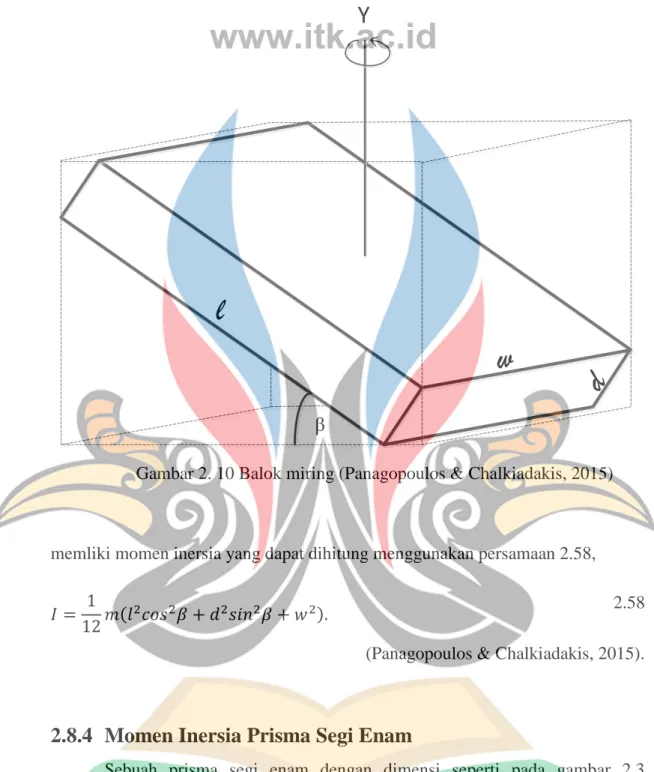
Sedangkan sebuah balok miring dengan sudut sebesar β yang diputar terhadap sumbu y seperti pada gambar 2.8,
31
l
w d
β
Y
Gambar 2. 10 Balok miring (Panagopoulos & Chalkiadakis, 2015)
memliki momen inersia yang dapat dihitung menggunakan persamaan 2.58,
( ) 2.58
(Panagopoulos & Chalkiadakis, 2015).
2.8.4 Momen Inersia Prisma Segi Enam
Sebuah prisma segi enam dengan dimensi seperti pada gambar 2.3 memiliki momen inersia terhadap tiga sumbu putar yang dapat dihitung menggunakan persamaan berikut:
(
) (
)
(2.59)
32
( )
(Zanetti & DeMars, 2018)
y
z x
h
Gambar 2. 11 Prisma segi enam (Zanetti & DeMars, 2018)
Gambar 2.11 mengilustrasikan bentuk prisma segi enam dengan tinggi h, yang diputar pada tiga sumbu X, Y, Z, dan memiliki panjang sisi alas segi enam sebesar a dan letak sumbu putar X dan Y yang dapat dlihat pada gambar 2.12.
33
d a
y
x
Gambar 2. 12 Alas prisma segi enam (Zanetti & DeMars, 2018).
2.9 Mean Absolute Error
Salah satu metode untuk mengevaluasi selisih antara nilai yang dinginkan dengan nilai yang didapatkan adalah dengan menggunakan perhitungan Mean Absolute Error. MAE dapat dituliskan pada persamaan 2.59,
∑| |
(2.60)
di mana adalah jumlah sampel data, dan | | adalah nilai mutlak dari selisih antara nlai yang dinginkan dengan nilai aktual (Chai & Draxler, 2014).
2.10 Particle Swarm Optimization
Particle Swarm Optimization (PSO) dikembangkan oleh Kennedy dan Eberhart di tahun 1995, terinspirasi dari sekelompok burung dan ikan yang berada di alam dalam menemukan sumber makanan. Algoritma ini digunakan dalam menyelesaikan permasalahan yang bersifat kontinyu, diskret, linear maupun nonlinear (Robandi, 2019).
34
Pada algoritma PSO pencarian solusi dilakukan oleh suatu populasi yang terdiri dari beberapa partikel. Populasi dibangkitkan secara acak dengan batasan nilai terkecil dan terbesar. Setiap partikel merepresentasikan posisi atau solusi dari permasalahan yang dihadapi. Setiap partikel melakukan pencarian solusi yang optimal pada ruang pencarian. Masing-masing partikel akan memberkan informasi possi terbaiknya pada partikel lain. Selanjutnya setiap partikel akan memperbarui posisinya berdasarkan posisi terbaik dari partikel tersebut (local best) dan posisi partikel terbaik dari seluruh kawanan (global best) pada ruang pencarian. Hal tersebut dilakukan hingga mencapai batas maksimal iterasi yang diberikan (Robandi, 2019). Posisi terbaik akan diperoleh melalui evaluasi yang dilakukan menggunakan sebuah fitness function untuk setiap iterasi yang dilakukan pada setiap partikel (Koohi & Groza, 2014).
Posisi dan kecepatan masing-masing partikel dapat ditulis menggunakan persamaan berikut:
( ) ( ) ( ) ( ) (2.61)
( ) ( ) ( ) ( ) (2.62)
Dengan = merepresentasikan local best dari partikel ke-i.
sedangkan merepresentasikan global best dari seluruh kawanan adalah posisi partikel, adalah kecepatan partikel, adalah indeks partikel, adalah iterasi ke- dan adalah ukuran dimensi ruang.
Posisi dan kecepatan masing-masing partikel untuk setiap iterasi dapat diperbarui menggunakan persaman berikut:
( ) ( ) . ( )/ ( ( )) (2.63)
( ) ( ) ( ) (2.64)
dengan dan adalah suatu konstanta yang bernilai positif. Kemudian dan adalah suatu bilangan acak yang bernilai antara 0 sampai 1(Robandi, 2019). Alur algoritma PSO dapat dilihat melalui ilustrasi yang ditampilkan pada flowchart berikut:
35
Start
Pengaturan parameter konstanta C1 dan C2
Membangkitkan secara random
Menghitung nilai fitness setiap
partikel
Apakah nilai fitness lebih baik dari Pbest
Pbest tetap Tetapkan nilai
Pbest = fitness
A
Tetapkan nilai Pbest terbaik dari semua partikel menjadi Gbest
A
Update kecepatan untuk tiap partikel
Update posisi untuk tiap partikel
Apakah target atau optimasi telah tercapai
Selesai Tidak
Ya
Ya
Tidak B B
Gambar 2. 13 Flowchart Algoritma PSO (Robandi, 2019).
2.11 Posisi Penelitian
Tabel 2.2 merupakan penelitian yang telah dilakukan sebagai gambaran utama dalam tugas akhir yang akan dilakukan.
Tabel 2. 2 Penelitian Terdahulu No Nama dan
Tahun Publikasi
Metode Judul Penelitian
Hasil
1. Sahim Yulidirim (2019)
PID Design and trajectory control of universal drone system
Pengaruh perubahan jumlah lengan dan panjang lengan dari multirotor terhadap kestabilan dengan jalur tracking trajectory yang sama. Perubahan panjang lengan tidak berpengaruh terhadap kestabilan wahana.
36
No Nama dan Tahun Publikasi
Metode Judul Penelitian
Hasil
2. Yousif Al- Dunainawia (2017)
MIMO ANFIS- PSO based NARMA- L2
A new MIMO ANFIS-PSO based NARMA-L2 controller for nonlinear dynamic systems
Hasi ANFIS-PSO NARMA-L2 lebih baik daripada pengendali lain dalam semua perilaku yaitu setpoint yang mulus, overshoot puncak berkurang dan indeks kinerja yang lebih baikmenggunakan ISE, dan ITAE.
3 Bhakti Yudho Suprapto (2017)
Modified Elman Recurrent Neural Network
Modified Elman Recurrent Neural Network for Attitude and Altitude Control of Heavy-lift Hexacopter
Penelitian ini dilakukan untuk membuktikan algoritma Modified Elman Recurrent Neural Network (MERNN) dapat meningkatkan kinerja
pengontrol. Hasil
menunjukkan bahwa
Algoritma MERNN memiliki error attitude dan altitude yang lebih rendah dibandingkan dengan algoritma Elman Recurrent Neural Network (ERNN).
4 Veronica Indrawati, dkk (2015)
Fuzzy Logic Controller
Waypoint Navigation of AR.Drone Quadrotor Using
Fuzzy Logic Controller
Pada penelitian ni membandingkan tiga cara tracking waypoint, yang pertama dengan mencapai titik posisi x, kemudian y dan z, yang kedua mencapai titik x dan y secara bersamaan kemudian posisi z dan yang terakhir mencapai tiga posisi x,y,z sekaligus. Hasil
menunjukkan skema
penerbangan langsung menuju tiga titik arah dengan FLC yang bekerja secara bersamaan merupakan metode yang paling baik dibandingkan dengan dua skema penerbangan lainnya.
37 No Nama dan
Tahun Publikasi
Metode Judul Penelitian
Hasil
5 Bima Wahyu Aditya A.
(2020)
Rain-Fall Optimization Algorithm (RFO)
Perancangan Pengendali Tracking waypoint Pada Hexacopter Menggunakan Rain-Fall Optimization Algorithm (RFO) Untuk Gerak Lateral
Pengendali RFO memiliki performa lebih baik jika dibandingkan dengan pengendali PSO sebagai pengendali tracking waypoint pada hexacopter