These factors lead to the use of the FSC principle in various predictive controllers for the PMSG, such as FSC-MPPC and FSC-MPTC. The MPTC has several disadvantages so that the computational burden is increased due to the need to estimate and predict values of the torque and flux in the cost function. Therefore, a high microprocessor is required for this defect [40]. The equal size of the reactive and active torques removes the weighing element necessary in the traditional MPTC system.
Another attempt to eliminate the use of the weighting factor in the cost function is the MPCC approach, which simplifies it as SVOC and MPTC, in addition to reducing the torque and current ripple as in the MP TC and MPPC strategies. The formulated cost function will consist of the absolute errors between the actual and reference d-q components of the stator voltage. III, methods that adopted predictive controllers with generator-side inverters and grid-side inverter control.
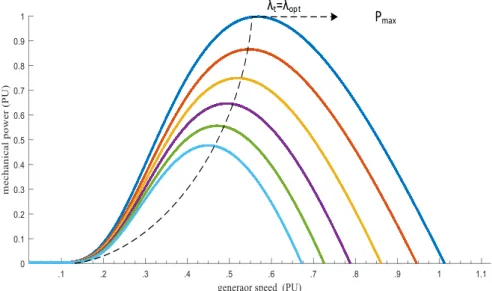
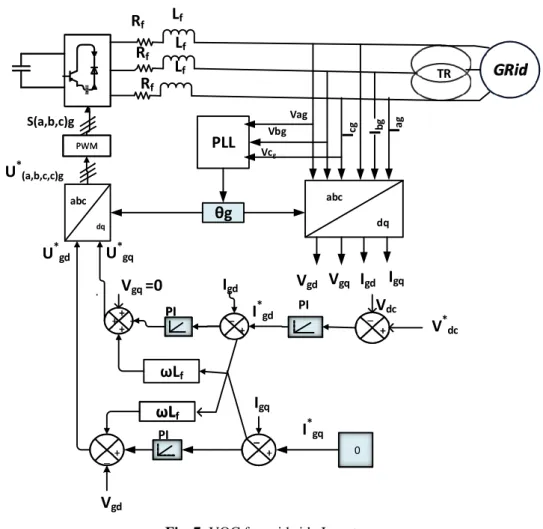
Characteristics of power factor (𝐶𝑝) and speed ratio ( vector. Then, to achieve a unity power factor, the quadrature grid current reference is set to zero (𝐼∗𝑔𝑞 = 0).
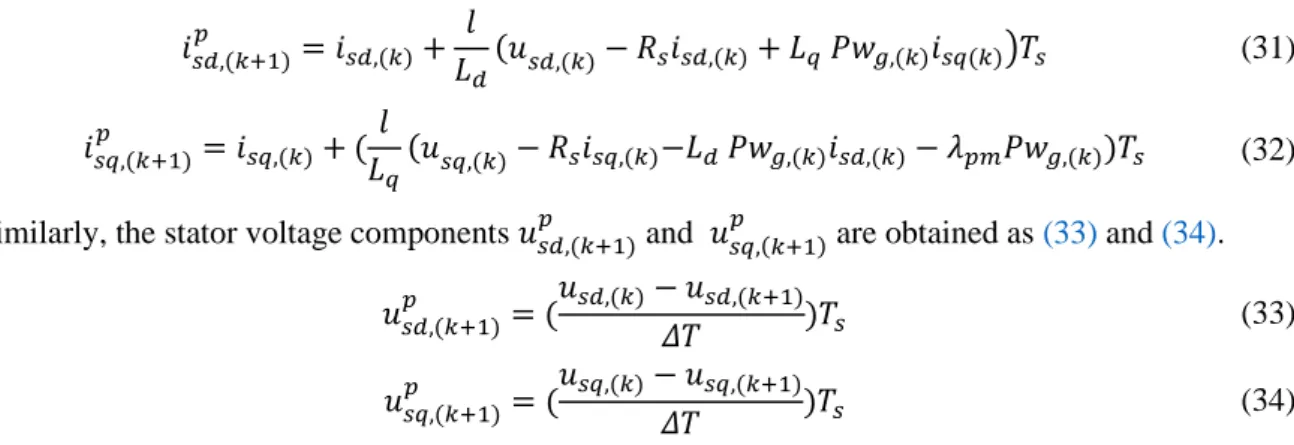
So the prediction of the stator current 𝑑 − 𝑞 components is obtained using the Euler method forward as (31) and (32).
Cost function(Eq(28))
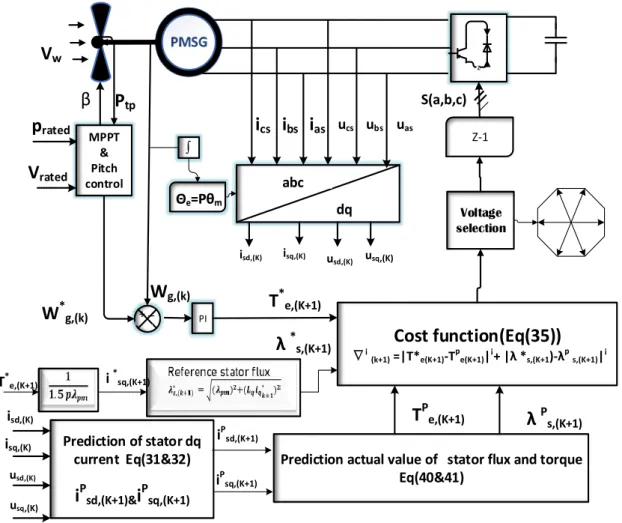
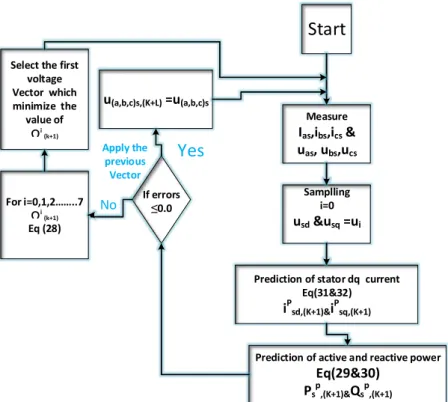
9 to show the operation steps of the MPPC, which start with estimating both stator current and voltage values and then taking samples. Then the values of the 𝑑𝑞 predicted stator current are calculated according to (31) and (32) to calculate the prediction values of the active and reactive power to (29) and (30) and the reference values are also measured ending with determination of the cost function to applying the voltage that produces its minimum value. A cost function reduces the absolute difference between the reference torque and its predictive value, and the absolute difference between the reference flux and its predictive value.
The cost function also uses a weighting value (𝑤𝑣𝑡) to satisfy the balance between torque and flux due to their nature differences. The lookup tables and hysteresis controllers used in the traditional DTC technique have been replaced with this cost function. The predictable torque and flux in the rotating frame of reference at the sample time (𝑘 + 1) 𝑇𝑠 are given by (40) and (41).
11 presents a flowchart to show the operation steps of MPTC, where both stator voltages and stator current are measured, then all these variables are sampled, then the prediction values of 𝑑𝑞 stator current are calculated according to (31) ) and (32) to use them to determine the prediction values of stator flux and the torque at the same time, where the reference values of the stator flux and torque are calculated through (38). In the final step, the cost function minimizes the errors in the reference and prediction values of the stator and torque harmonics of (35) to apply the voltage, which achieves this minimization.
W * g,(k)prated
Cost function(Eq(35))
Results and Discussion
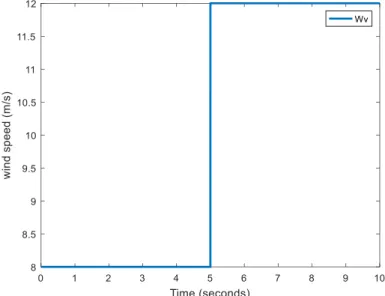
15, the value of the synchronous generator speed for all controllers at that time (𝑡 = 5𝑠) starts to vary depending on the variation in wind speed due to the control dynamics of the wind turbine. 17 shows the electromagnetic torque for the three controllers, which starts to vary at time 𝑡 = 5𝑠, depending on the wind speed variation. This is called applying the voltage to the machine directly from the output of the controller, without any estimation and prediction, as with MPPC and MPTC, so any changes in machine parameters or errors do not affect the control, making the PVC wrinkle less and less computation, burden and robustness.
Another reason for low ripple and less computational capacity is the elimination weighting factor from the cost function of the proposed PVC, on the contrary, MPPC and MPTC. Alternatively, the voltage is the first variable that the windings face making the PVC the fastest dynamic response compared to other predictive controllers, as per the previous figure. 19 depicts the active and reactive powers of the generator, which confirm that the proposed PVC has the lowest ripple and the fastest dynamic response compared to the other predictive control, because the const function controls the voltage signal, which is the first applied variable on the machine winding directly. from the output of the controller and not from the cost function of the MPPC needs the rated powers, then apply the voltage or torque and flux calculation as in the MPTC this makes the proposed PVC faster dynamic response than the techniques other predictive.
20 shows a zoomed view of the power variation to show the detailed power dynamics under different controllers. For this reason, we get the form of 𝑞current similar to the form of torque and power. 22 shows a zoomed-in view of the 𝑑 − 𝑞 current components to show the deviation from the reference currents under the three different operating systems.
Based on these figures, it can be shown that the designed PVC strategy has the lowest current harmonics, which refers to the effects of applying voltage without dependence on machine parameters, so that the oscillation of voltage becomes low. 27 gives an in-depth look at the 𝑑𝑞 mains power components that 𝑞 mains current follows the reference 𝐼∗𝑔𝑞= 0 to achieve unity power factor and proved that PVC has smooth dynamic response and low current oscillation, referring to the effect of applying the voltage and eliminating the weighting factor from its cost function. 28 shows the DC link voltage for all controllers where the PVC holds the voltage at its reference with the fewest oscillations and the fastest dynamic response compared to the other predictive algorithms.
Certainly, the stator power under the proposed PVC is low ripple as a result of the DC link voltage of PVC having the lowest ripple than the others. This variable is taken into account as an indicator of the amount of computational help that each controller can offer. The results in the table show that PVC has the fewest commutations and effectively helps to reduce the computational burden, which helps to limit link loss, which is considered one of the major problems of predictive control strategies.
The FFT spectrum analysis for the stator currents is presented in graphical forms for the three predictive controllers sequentially from Fig. The statistics confirm the effectiveness of the proposed PVC in achieving lower THD in generated current signals compared to the other predictive techniques.
Conclusion
Qu, “Discrete-time torque control for direct-drive PMSG-based wind power conversion systems,” in IEEE Transactions on Industry Applications , vol. Diab, "Effective Model Predictive Voltage Control for a Sensorless Doubly Fed Induction Generator," in IEEE Canadian Journal of. Zaki Diab, “Cost-Effective Predictive Flux Control for Sensorless Doubly Fed Induction Generator,” in IEEE Access, vol.
Li, “Improved virtual inertia of PMSG-based wind turbines based on multi-objective predictive control model,” Energies, vol. Chau, “Field Oriented and Direct Torque Control for VSI Fed PMSM Parallel Drives with Variable Switching Frequencies,” in IEEE Transactions on Power Electronics, vol. Bolognani, “Clear predictive voltage control for an induction motor in Middle East International Power Systems Conference (MEPCON), p.
Bolognani, "Effektiv modelprædiktiv direkte drejningsmomentkontrol for en induktionsmotordrev International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), s. Abdelsalam, "Fuzzy-baseret Adaptive Sliding Mode Control for a Direct-Driven PMSG Wind Energy System st International Middle East Power Systems Conference (MEPCON), s. Soltani, "Sliding Mode Control of PMSG Wind Turbine Based on Enhanced Exponential Reaching Law," i IEEE Transactions on Industrial Electronics, vol.
Mossa, "A new modulated finite control set model predictive control of quasi-Z source inverter for PMSM drives," Electronics, vol. Kennel, "Multiple-Vector Model Predictive Power Control for Grid-Tied Wind Turbine System with Improved Steady-State Control Performance." Bolognani, “Predictive power control for a linearized doubly fed induction generator model st International Middle East Power Systems Conference (MEPCON), pp.
Cao, “Simplified model predictive direct torque control method without weighting factors for permanent magnet synchronous generator based wind power system,” IET Electric Power Applications, vol. Li, “An improved predictive torque control model for a two-level permanent magnet synchronous motor powered by an inverter,” Electronics, vol. Bolognani, “Effective Model Predictive Current Control for a Sensorless IM Drive IEEE International Symposium on Sensorless Control for Electrical Drives (SLED), pp.

![Fig. 3. The relationship between power coefficient (C p ) and tip speed ratio (𝜆 𝑡 ) for various values of 𝛽 The tip speed ratio (𝜆 𝑡 ), is obtained by (15) [51]](https://thumb-ap.123doks.com/thumbv2/123dok/10781950.0/7.892.239.679.418.709/relationship-power-coefficient-speed-ratio-various-values-obtained.webp)