Berangkat dari latar belakang tersebut, maka dilakukan penelitian mengenai penerapan kecerdasan buatan (AI) pada bidang computer vision sebagai solusi untuk membantu menghitung tandan tebu secara akurat menggunakan foto udara dengan menggunakan algoritma YOLOv5. Dari latar belakang tersebut maka dilakukan penelitian tentang penerapan kecerdasan buatan (AI) pada bidang computer vision sebagai solusi untuk membantu menghitung cluster dengan akurat menggunakan foto udara dengan menggunakan algoritma YOLOv5. Tak lupa juga saya persembahkan kepada seluruh dosen, keluarga angkatan 2018, dan civitas Departemen Teknik Elektro Universitas.
Tesis berjudul “Penerapan AI Computer Vision dan Machine Learning Yolov5 untuk Penilaian Produksi pada Perkebunan Tebu” yang merupakan salah satu syarat untuk memperoleh gelar Sarjana Teknik di Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung. Seluruh dosen dan staf di Departemen Teknik Elektro yang telah memberikan ilmu, bantuan dan pengalaman hidup yang bermanfaat kepada penulis selama menempuh pendidikan di universitas.
PENDAHULUAN
- Latar Belakang
- Tujuan Penelitian
- Perumusan Masalah
- Batasan Masalah
- Manfaat Penelitian
- Hipotesis
- Sistematika Penulisan
Estimasi sampel dilakukan dengan menghitung baris dan kolom terluar pada suatu area dan memperkirakan jumlah cluster tebu yang diambil sampelnya. Kemudian cluster-cluster tersebut dikalikan dengan parameter evaluasi yaitu rata-rata jumlah batang per cluster, rata-rata berat batang, rata-rata tinggi batang dan nilai rendemen gula. Cara ini baik, namun mempunyai kelemahan yaitu tepi (sampel) tidak selalu mewakili jumlah kelompok tebu secara akurat.
Pertumbuhan pohon tebu yang tidak terpola dan berkelompok menyebabkan pola pertumbuhan tanaman tebu tidak seragam atau berpola. Dalam penelitian ini, sistem penghitungan pohon tebu lengkap diimplementasikan menggunakan foto udara UAV (unmanned aerial vehicle) menggunakan kecerdasan buatan, visi komputer AI, dan algoritma pembelajaran mesin YOLOv5. Membuat algoritma yang sangat akurat berdasarkan kecerdasan buatan, AI computer vision untuk menghitung jumlah tandan tebu berdasarkan foto udara.
Membuat algoritma perhitungan estimasi produksi berdasarkan hasil penghitungan tandan tebu dengan keluaran BBT (dalam ton) dengan parameter rata-rata jumlah batang per tandan, rata-rata berat batang, rata-rata tinggi batang dan nilai rendemen gula. Cara membuat algoritma statistik untuk mengolah hasil penghitungan cluster tebu sehingga menghasilkan output berupa bobot BBT yang dapat digunakan untuk memperkirakan produksi tebu. Algoritme kecerdasan buatan dengan pembelajaran mesin YOLOv5 memberikan akurasi tinggi dalam menghitung cluster tebu dari foto udara.
Hasil perhitungan tersebut selanjutnya dapat digunakan untuk memperkirakan produksi dengan produksi BAT (dalam ton) dengan parameter seperti rata-rata jumlah batang per tandan, rata-rata berat batang, rata-rata tinggi batang dan nilai rendemen gula.
TINJAUAN PUSTAKA
Penelitian Terdahulu
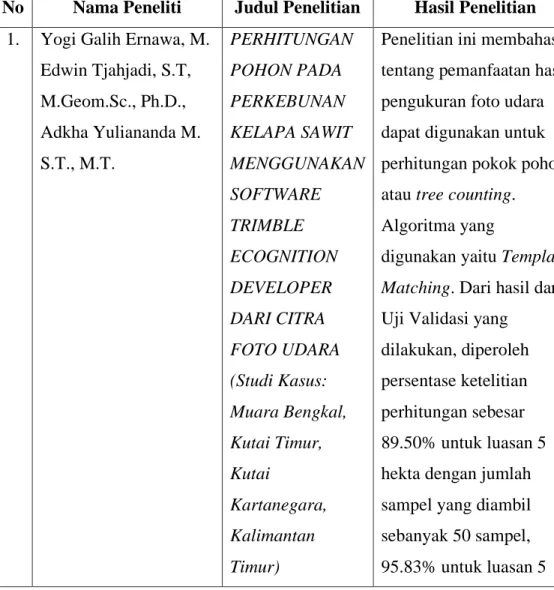
Terdapat beberapa penelitian terdahulu terkait penerapan AI computer vision dan machine learning YOLOv5 untuk estimasi produksi pada perkebunan tebu, dapat dilihat pada Tabel 2.1. Penelitian ini membahas bagaimana hasil pengukuran foto udara dapat digunakan untuk penghitungan pohon. Deteksi dan penghitungan jeruk hijau di kebun berdasarkan YOLOv5-CS dan AI Edge System.
Penelitian ini membahas deteksi real-time untuk penghitungan langsung jeruk hijau di perkebunan. Hasil penelitian menunjukkan model [email protected] YOLOv5-CS untuk jeruk hijau sebesar 98,23% dan recall sebesar 97,66%. Sistem yang diusulkan menggunakan model deep learning YOLO untuk deteksi objek dan menyajikan GUI untuk mendukung pengaturan parameter.
Foto Udara
Keakuratan dan luas yang diperoleh dari foto non-metrik tidak sebaik akurasi yang diperoleh dari foto metrik. Keunggulan UAV dibandingkan pesawat berawak adalah UAV dapat digunakan dalam situasi berisiko tinggi tanpa membahayakan nyawa pilotnya. UAV juga dapat digunakan di daerah yang sulit dijangkau dan dapat terbang tinggi di atas awan sehingga foto yang dihasilkan bebas awan.
Kecerdasan Buatan (AI) Computer Vision
Machine Learning
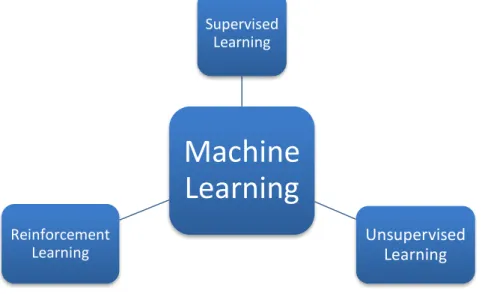
Penelitian mengungkapkan bahwa pembelajaran mesin dapat dibagi menjadi tiga kategori yaitu Supervised Learning, Unsupervised Learning dan Reinforcement Learning [15] seperti yang ditunjukkan pada Gambar 2.3 di bawah. Supervised learning menggunakan teknik dengan metode klasifikasi dimana dataset diberi label lengkap untuk mengklasifikasikan kelas yang tidak diketahui. Sedangkan teknik unsupervised learning menggunakan metode yang disebut clustering, dimana pada metode ini objek tidak akan diberi label khusus pada awalnya.
Mesin belajar dari ciri-ciri khusus objek dan mesin yang dihasilkan akan memberikan label khusus untuk mengidentifikasi kelas yang ditentukan. Berikutnya, Reinforcement Learning biasanya berada di antara pembelajaran yang diawasi dan pembelajaran tanpa pengawasan, dimana jenis ini melibatkan pembelajaran mesin tentang sistem pengambilan keputusan setelah pembelajaran berdasarkan data yang diberikan [12] [16].
Convolutional Neural Network (CNN)
Fukushima, peneliti dari NHK Broadcasting Science Research Laboratories, Kinuta, Setagaya, Tokyo, Jepang dengan nama NeoCognition. Proses ini membagi seluruh gambar menjadi gambar-gambar kecil, sehingga nantinya setiap gambar kecil ditampilkan berdasarkan level warna RGB dengan angka tersendiri. 6 bagian kecil akan dimasukkan ke dalam jaringan saraf kecil [sumber: Adam Geitgey, https://medium.com/.
Jadi faktor perkalian semua potongan gambar akan sama, atau dalam sistem Neural Network disebut dengan distribusi bobot. Jika suatu objek yang menarik terlihat dalam suatu gambar sesuai dengan pelabelan objek khusus, maka objek tersebut ditandai sebagai objek yang menarik. Ketika semua fragmen gambar telah menerima keluaran diskrit dari Jaringan Neural Kecil, array baru akan dirancang untuk mewakili keseluruhan gambar.
Ukuran array harus dikurangi menggunakan metode yang disebut downsampling seperti yang ditunjukkan pada Gambar 2.8. 8 Max Pooling [sumber: Adam Geitgey, https://medium.com/] Downsampling menggunakan prinsip max pooling atau mengambil nilai piksel terbesar untuk setiap kernel pooling. Jika digambarkan secara keseluruhan maka tahapan CNN dalam mendeteksi objek pada suatu gambar akan terlihat seperti Gambar 2.9.
Array adalah sekumpulan angka dimana array ini akan dimasukkan ke dalam jaringan saraf untuk memproses apakah gambar yang diinginkan cocok dengan label atau tidak.
![Diagram Skematik yang mengilustrasikan NeoCognition ditunjukkan pada gambar xx [17]. Konsep NeoCognition tersebut kemudian dimatangkan oleh Yann LeChun, seorang peneliti dari AT&T Bell Laboratories di Holmdel, New Jersey, USA](https://thumb-ap.123doks.com/thumbv2/123dok/11011201.0/29.893.197.746.364.609/diagram-skematik-mengilustrasikan-neocognition-ditunjukkan-neocognition-dimatangkan-laboratories.webp)
YOLO dan YOLOv5
YOLO menggunakan model pembelajaran sebagai acuan pendeteksian gambar uji baru, sehingga pembelajaran berulang tidak diperlukan untuk mendeteksi gambar baru. YOLO mempelajari representasi objek yang dapat digeneralisasikan dengan membuat model yang dapat digunakan untuk deteksi nanti. Setiap sel kisi memprediksi kotak pembatas, B, dan skor keyakinan atau keyakinan terhadap objek kotak tersebut.
Kemudian skor keyakinan atau keyakinan mewakili nilai IoU antara kotak pembatas sebenarnya (ground truth) dan kotak pembatas yang diprediksi. Pada waktu pengujian, YOLO akan mengalikan probabilitas kelas bersyarat dengan prediksi batas kepercayaan individu sesuai persamaan (2) di bawah. Spatial Pyramid Pooling (SPP) adalah lapisan pooling yang digunakan untuk menghilangkan batasan ukuran tetap pada jaringan.
Gambar 2.15 menunjukkan bahwa semakin tinggi, semakin baik tingkat prediksi rata-rata, dan semakin jauh ke kiri, semakin cepat proses pendeteksiannya [26]. Dari tabel yang dihasilkan, model klasifikasi dapat dihitung akurasi, presisi, F-Score dan masih banyak variabel lainnya yang dapat dihitung berdasarkan kondisi data prediksi atau klasifikasi. Isi tabel matriks konfusi ada empat yang biasanya diwakili oleh tabel seperti pada gambar 2.16 [23].
Mean Average Accuracy (mAP) adalah metrik yang digunakan untuk mengukur keakuratan detektor objek di semua kelas dalam database tertentu.
![Gambar 2. 10 Sistem Deteksi pada YOLO [22]](https://thumb-ap.123doks.com/thumbv2/123dok/11011201.0/33.893.178.758.277.394/gambar-2-10-sistem-deteksi-pada-yolo-22.webp)
Graphical user interface (GUI) dan PyQt5
AI Project Cycle
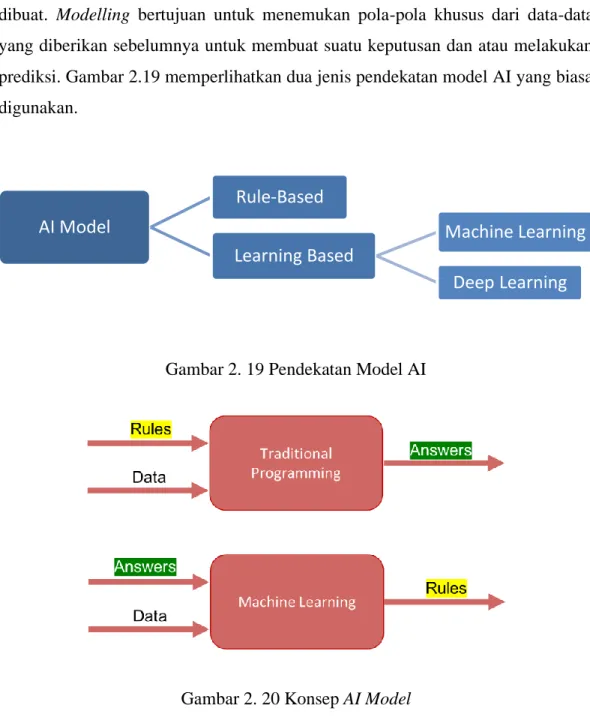
Fase ini merupakan fase inti dimana proses pembuatan algoritma pada bahasa pemrograman tertentu sebagai metode pembelajaran mesin (fase pelatihan) dibuat. Pemodelan bertujuan untuk menemukan pola khusus dari data yang diberikan sebelumnya untuk mengambil keputusan dan/atau prediksi. Pada Model Berbasis Aturan, nilai masukan berupa data dan aturan yang pertama kali dibuat oleh pemrogram untuk menghasilkan solusi yang diharapkan.
Sedangkan seorang programmer untuk model berbasis pembelajaran akan merancang suatu algoritma yang inputnya terdiri dari data dan jawaban atau solusi dari data tersebut. Hasilnya, mesin akan menemukan pola atau hubungan yang akan dijadikan model untuk mengambil keputusan selanjutnya. Oleh karena itu, jika diberikan data baru maka pemrogram tidak perlu membuat program baru atau mengubah sistem karena aturan terkait data tersebut sudah dibentuk oleh perangkat sebelumnya.
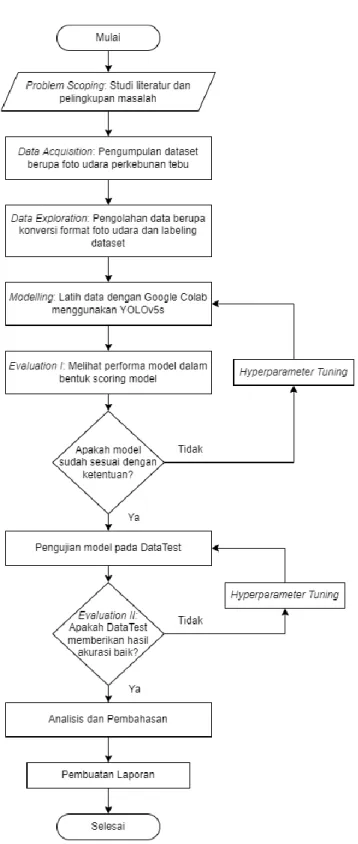
Fase ini meliputi peninjauan terhadap kinerja model yang telah dilatih, apakah model tersebut baik atau tidak. Jika model yang baik tidak diperoleh, dapat dilakukan tuning hyperparameter, dimana konfigurasi proses pemodelan akan diubah.
METODE PENELITIAN
- Waktu dan Tempat Penelitian
- Alat dan Bahan Penelitian
- Pembuatan Algoritma dan Testing
- Diagram Alir Penelitian
Proses ini dilakukan untuk mengidentifikasi permasalahan yang ada dan menciptakan solusi untuk menyelesaikan permasalahan dengan AI. Pada fase ini dicari, dipelajari, dan dipahami materi dari berbagai literatur yang berkaitan dengan permasalahan yang ada. Data yang disiapkan berupa foto udara tanaman tebu dengan luas petak 150 m2 dengan luas lahan total 22 Ha.
Dataset yang dihasilkan akan berupa file anotasi dalam format teks yang berisi elemen kelas dan posisi piksel objek pada gambar. Pada tahap ini digunakan metode 'trial and error' pada setiap konfigurasi skema pelatihan hingga tercapai konfigurasi dengan skor akurasi tinggi. Setelah menjalankan berbagai kombinasi parameter, diperoleh model terbaik untuk konfigurasi ukuran gambar 2000, 4 paket, dan 300 epoch.
Setelah dilakukan pelatihan untuk membuat model, selanjutnya dilakukan pengujian deteksi pola terhadap data pengujian yang telah disiapkan sebelumnya. Pada fase ini, metode 'trial and error' kembali digunakan untuk setiap konfigurasi skema pelatihan hingga diperoleh konfigurasi dengan skor akurasi tertinggi yang diterapkan pada seluruh kumpulan data. Setelah melakukan proses ini, diperoleh konfigurasi terbaik dengan parameter ukuran gambar 1920 dan skor kepercayaan 0,25.
Data yang diperoleh selanjutnya akan diolah untuk dihitung dan diolah menjadi sistem estimasi produksi tebu.
KESIMPULAN
Kesimpulan
Saran
Yogi Galih Ernawa, “Estimasi Pohon Perkebunan Kelapa Sawit Menggunakan Software Pengembang Trimble Ecognition dari Citra Udara (Studi Kasus : Muara Bengkal, Kutai Timur, Kutai Kartanegara, Kalimantan Timur),” Geodesi ITN Malang, 2020. Santad, “Penggunaan YOLO Deep Learning Model Deteksi Bagasi Terbengkalai Secara Real Time IEEE 7th Global Conference on Consumer Electronics (GCCE), hal. Martinus Edwin Tjahjadi, Aerial Photography Menggunakan Unmanned Aerial Vehicle (UAV), Malang: Teknik Geodesi Institut Teknologi Nasional, 2019.
Penggunaan Quadcopter Dji Phantom 3 Pro Unmanned Aerial Vehicle (UAV) dalam Pembuatan Peta Orthophoto (Studi Kasus Kampus Universitas Diponegoro), “Jurnal Geodesi Undip, 2017. Ahmad Roihan, “Penggunaan Machine Learning di Berbagai Bidang : Review paper,” Jurnal Indonesia Komputer dan Teknologi Informasi (IJCIT), vol.
Thupae, "Machine Learning Techniques for Traffic Identification and Classification in SDWSNs: A Survey," IECON 2018 - IEEE Industrial Electronics Society 44th Annual Conference, p. Fukushima, "Neocognitron: a self-organizing neural network model for a pattern recognition mechanism unaffected by position shift". Rachmawati, "Deteksi Jumlah Kendaraan di Jalur SSA Kota Bogor Menggunakan Algoritma Deep Learning YOLO," Proceeding LPPM Uika Bogor, 2020.
Joseph Redmon, "You Only Look Once: Unified, Real-Time Object Detection IEEE Conference on Computer Vision and Pattern Recognition (CVPR), str.

![Gambar 2. 2 Computer Vision [sumber: www.n-ix.com/computer-vision/ ] 2.4 Machine Learning](https://thumb-ap.123doks.com/thumbv2/123dok/11011201.0/27.893.172.767.232.649/gambar-computer-vision-sumber-computer-vision-machine-learning.webp)
![Gambar 2. 5 Proses Pemecahan Menjadi 77 Bagian Kecil [sumber: Adam Geitgey, https://medium.com/ ]](https://thumb-ap.123doks.com/thumbv2/123dok/11011201.0/30.893.283.655.124.367/gambar-proses-pemecahan-menjadi-bagian-kecil-sumber-geitgey.webp)

![Gambar 2. 8 Max Pooling [sumber: Adam Geitgey, https://medium.com/ ] Downsampling menggunakan prinsip max pooling atau mengambil nilai pixel terbesar untuk setiap pooling kernel](https://thumb-ap.123doks.com/thumbv2/123dok/11011201.0/31.893.229.708.740.937/gambar-pooling-geitgey-downsampling-menggunakan-prinsip-mengambil-terbesar.webp)
![Gambar 2. 7 Array Baru yang diperoleh [sumber: Adam Geitgey, https://medium.com/ ]](https://thumb-ap.123doks.com/thumbv2/123dok/11011201.0/31.893.346.591.276.478/gambar-array-baru-diperoleh-sumber-adam-geitgey-medium.webp)
![Gambar 2. 9 Keseluruhan Cara Kerja CNN [sumber: Adam Geitgey, https://medium.com/ ]](https://thumb-ap.123doks.com/thumbv2/123dok/11011201.0/32.893.172.765.261.420/gambar-keseluruhan-cara-kerja-sumber-adam-geitgey-medium.webp)
