Pendahuluan
Perumusan Masalah
Batasan Masalah
Tujuan
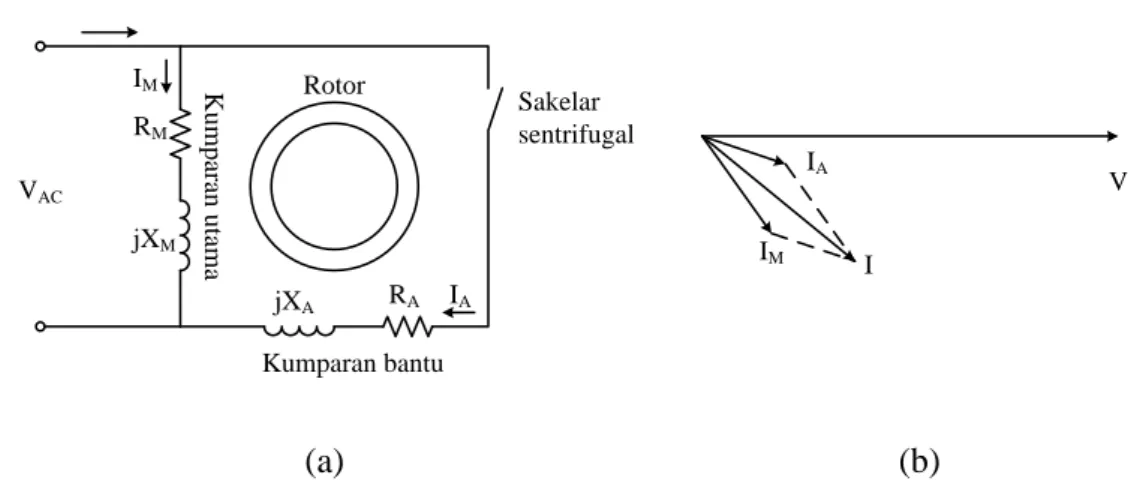
Rangkaian kumparan motor induksi satu fasa terbagi satu fasa ditunjukkan pada Gambar 2.3. b) Arus motor pada kondisi start. Motor induksi satu fasa yang digunakan adalah motor induksi dengan kapasitas sumber tegangan 220 Volt, 3000 RPM, 1,9 A. Implementasi pengontrol PID pada Arduino digunakan pada mikrokontroler untuk menstabilkan putaran motor induksi satu fasa dengan mengatur frekuensinya. beradaptasi dengan perubahan beban.
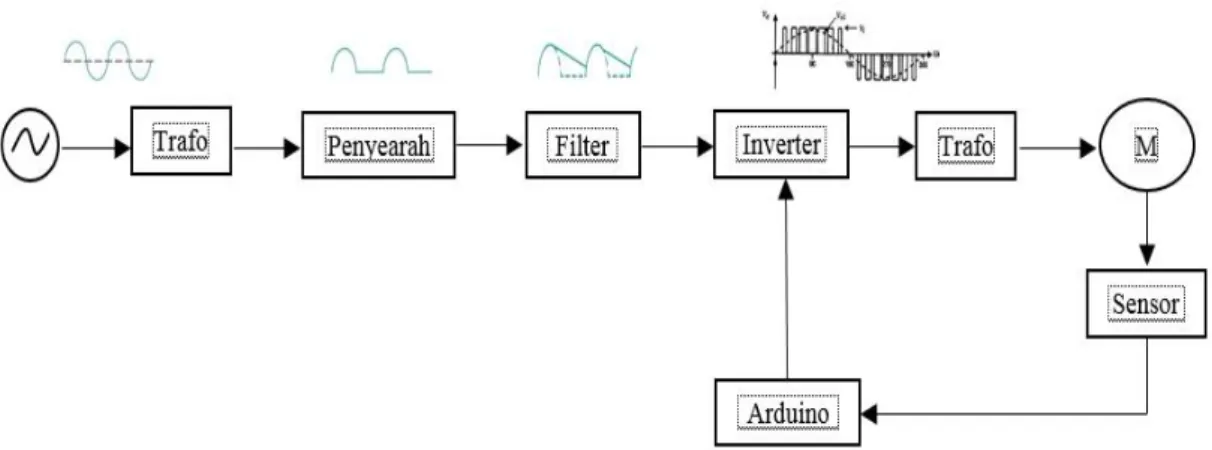
Hasil akhir dari penelitian ini adalah rancangan kendali kecepatan motor induksi satu fasa dengan PWM menggunakan pengontrol PID berbasis Aduino. Berikut ini adalah diagram blok perancangan dan pembuatan sistem kendali kecepatan putar motor induksi satu fasa. Untuk menghasilkan tegangan AC sebagai masukan pada motor induksi digunakan inverter satu fasa full bridge dengan menggunakan saklar MOSFET (Metal Oxide Silicon Field Effect Transistor).
Analisis kerja penelitian perancangan sistem kendali kecepatan satu fasa motor induksi menggunakan PID dilakukan setelah pengujian peralatan selesai. Analisis yang dilakukan meliputi pengujian kecepatan motor dengan menggunakan pengontrol PID sebagai pengatur kecepatan motor induksi satu fasa dengan beban.
Tinjauan Pustaka
Kecepatan Motor Induksi
Kecepatan putaran motor induksi ditentukan oleh kecepatan putaran medan magnet (sinkron) dan slip akibat beban yang berhubungan dengan poros motor. Pada keadaan tanpa beban, slip motor induksi sangat kecil sehingga putaran rotor mendekati kecepatan sinkron. Ƞ = daya keluaran / daya masukan x 100 (2.6) Karena tegangan harus diturunkan pada frekuensi rendah, mengurangi kecepatan motor induksi akan mengurangi daya yang dikonsumsi.
Motor Induksi Satu Fasa
Start kapasitor dan pengoperasian kapasitor 3. Pada bagian ini kita hanya akan membahas motor induksi satu fasa terbagi satu fasa karena motor jenis ini lebih banyak digunakan dalam aplikasi praktis. Untuk menghasilkan medan magnet yang berputar, stator mempunyai dua belitan yaitu kumparan utama dan kumparan bantu yang disusun terpisah 90° dalam fasa listrik [4]. Kumparan bantu dirancang memiliki rasio resistansi terhadap reaktansi yang lebih besar dibandingkan kumparan utama dengan menggunakan bahan penghantar dengan penampang yang lebih kecil.
Arus pada kumparan bantu lebih besar dari arus pada kumparan utama, menyebabkan salah satu dari dua medan magnet stator yang berputar berlawanan menjadi lebih besar dari yang lain. Motor induksi split mempunyai torsi awal yang cukup tinggi dengan arus awal yang relatif kecil [4]. Motor jenis ini cocok untuk aplikasi yang tidak memerlukan torsi awal yang sangat tinggi, seperti kipas angin, blower, dan pompa sentrifugal.
Arus dan medan magnet pada kumparan bantu selalu mencapai nilai puncak sebelum arus pada kumparan utama.
Pengaturan Kecepatan Motor Induksi
Konverter Daya
- Penyearah
- Inverter Voltage-source Satu Fasa
- Pulse Width Modulation (PWM)
12 Untuk memperbaiki bentuk gelombang keluaran penyearah sehingga riak yang dihasilkan berkurang, ditambahkan filter kapasitif pada terminal keluaran dioda. Kemudian, ketika tegangan vs turun di bawah tegangan kapasitor, muatan yang disimpan dalam kapasitor dilepaskan ke resistor beban R. Dengan tegangan masukan DC yang sama, tegangan keluaran maksimum yang dihasilkan adalah dua kali lipat tegangan keluaran inverter setengah jembatan.
Hal ini juga berlaku untuk daya, sedangkan arus keluaran dan arus switching adalah setengah dari inverter setengah jembatan. Pada teknik ini, pengendalian masing-masing kaki inverter dilakukan secara terpisah dengan membandingkan gelombang segitiga dengan dua gelombang sinusoidal seperti terlihat pada Gambar 2.9 [7].

LCD (Liquid Crystal Display)
Sensor Pendeteksi Kecepatan
Metode Ziegler Nichols dan metode good gain merupakan metode selain perhitungan matematis yang digunakan untuk mendapatkan nilai parameter PID yang sesuai untuk sistem. Metode perancangan sistem kendali kecepatan motor induksi satu fasa terhadap perubahan beban pada penelitian ini akan dilakukan dengan merancang sistem perangkat keras yang mencakup 1 unit kendali mikrokontroler Arduino. Kemudian kecepatan motor induksi satu fasa ini akan dikontrol oleh mikrokontroler dengan menggunakan pengontrol PID, dan rangkaian kendali ini mengatur sudut penyalaan frekuensi MOSFET yang dapat mengatur putaran motor induksi sesuai masukan yang diberikan berupa suatu nilai kesalahan dari kecepatan referensi yang ditetapkan akibat perubahan beban.
Perancangan sistem kendali kecepatan motor induksi satu fasa terhadap perubahan beban melalui pengaturan frekuensi dengan pengontrol PID merupakan suatu pengontrol terprogram yang menggunakan pengontrol PID untuk mengatur kecepatan motor terhadap perubahan beban sehingga mampu mempertahankan kecepatan. motor induksi pada kecepatan referensi yang telah ditentukan. Inverter yang digunakan adalah MOSFET IRF9630 dan MOSFET IRF630 yang mempunyai spesifikasi VDS maksimal -200 volt dan 200 volt, tegangan gate source +/- 20 v. Langkah pertama yang dilakukan adalah merancang perangkat keras berupa mikrokontroler yang berfungsi sebagai pusat kendali beberapa perangkat keras yang terhubung antara lain fotodioda yang digunakan untuk membaca kecepatan motor induksi, LCD, keyboard dan MOSFET yang berguna sebagai pengubah tegangan DC ke AC dan juga sebagai pengubah frekuensi dengan menggunakan PWM.
Perangkat keras merupakan alat atau komponen utama untuk mengendalikan kecepatan dan putaran motor induksi satu fasa yang terdiri dari beberapa bagian blok yang masing-masing mempunyai fungsi kerja penting dan saling menunjang. Pengontrolnya menggunakan mikrokontroler Arduino dengan menggunakan pengontrol PID untuk mengatur frekuensi inverter yang digunakan. Dari diagram blok tersebut dapat dijelaskan prinsip kerja diagram tersebut yaitu sumber listrik PLN yang berupa tegangan bolak-balik satu fasa disearahkan dengan menggunakan penyearah dioda jembatan penuh tap pusat sehingga menghasilkan tegangan searah.
Benar, pengaturannya berupa perintah untuk mengoperasikan MOSFET untuk mengatur lebar pulsa hingga mendapatkan frekuensi yang dapat mengatur kecepatan motor induksi. Cara yang digunakan untuk mengatur lebar pulsa adalah dengan mengatur sinyal on/off pada gerbang MOSFET. Pada penelitian ini digunakan LCD berukuran 16x2, dimana LCD berfungsi untuk menampilkan kecepatan motor saat beban ditambah atau dikurangi sehingga dapat mengetahui apakah kecepatan motor mengalami perubahan dari kecepatan referensi.
Dengan memberikan kecepatan referensi pada input yang diubah menjadi variabel frekuensi oleh mikrokontroler, maka diperoleh nilai error dan delta error antara kecepatan referensi dan kecepatan aktual motor akibat perubahan beban yang diberikan karena ketika a diberi beban maka kecepatan motor akan berkurang sehingga menyebabkan penurunan frekuensi karena kecepatan motor berbanding lurus dengan frekuensi. Kontroler PID memastikan motor dikendalikan sedemikian rupa sehingga dapat melaju kencang dan tetap pada posisi stabil. Layar menunjukkan seberapa tinggi putaran mesin. Jika kecepatan motor lebih rendah dari nilai toleransi minimum maka program pengontrol PID akan menaikkan nilai frekuensi dan sebaliknya jika kecepatan motor lebih besar dari kecepatan toleransi maksimum maka pengontrol akan menurunkan frekuensi motor.
Mikrokontroler Berbasis Arduino
- Lingkungan Pemrograman Arduino
- Struktur program Arduino
- Variabel dan Tipe Data Arduino
- Fungsi
- Board Arduino uno
Pengendali PID
- Kontrol Proporsional
- Kontrol Integral
- Kontrol Derivatif
- Persamaan PID
Pada penelitian ini digunakan pengontrol proporsional–integral–derivatif karena merupakan mekanisme kontrol loop umpan balik yang banyak digunakan di industri. Salah satu tugas pengontrol PID adalah mereduksi sinyal error yaitu perbedaan antara sinyal setting dengan sinyal sebenarnya. Semakin cepat respon pengontrol dan semakin kecil nilai error yang diperoleh maka semakin baik pengontrol PID tersebut.
Pengendalian proporsional berfungsi untuk memperkuat sinyal kesalahan penggerak (error signal) sehingga akan mempercepat keluaran sistem untuk mencapai titik acuan. Pada prinsipnya, kendali integral bertujuan untuk menghilangkan kesalahan keadaan tunak (offset) yang biasanya dihasilkan oleh kendali proporsional. Hubungan antara keluaran kontrol integral u(t) dengan sinyal error e(t) dapat dilihat pada persamaan 2.16 dan diagram blok pada gambar 2.17.
Kontrol derivatif dapat disebut sebagai pengontrol kecepatan karena keluaran pengontrol sebanding dengan laju perubahan sinyal kesalahan.

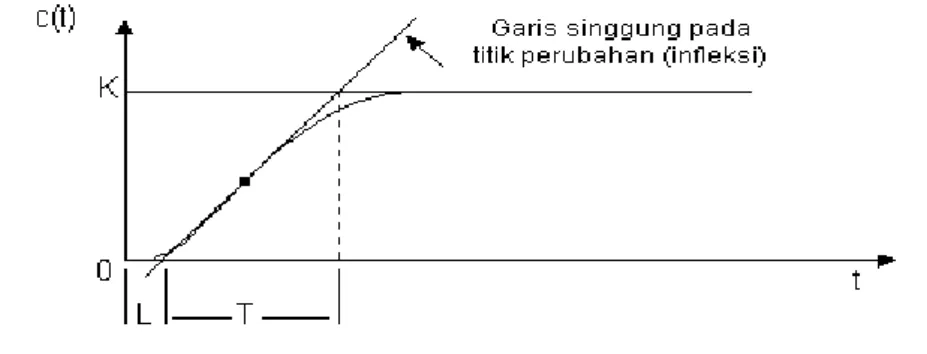
Metode Ziegler Nichols & Good Gain Method
- Karakteristik Proporsional
- Karakteristik Integral
- Karakteristik Derifatif
- Ziegler-Nichols Step Response Method
- Ziegler-Nichols Frequensy Response Method
- Good Gain Method
Metode gain yang baik merupakan cara untuk mendapatkan parameter PID yang sesuai dengan sistem. 31 sistem perangkat lunak atau perancangan perangkat lunak untuk mikrokontroler seperti sistem kontrol PID dengan Arduino dan pengujian secara keseluruhan akan dilakukan. Semakin baik nilai parameter PID maka semakin cepat sistem kendali mengubah sistem hingga set point yang telah ditentukan, meskipun terdapat sinyal error yang berubah-ubah.
Parameter PID diperoleh dengan mengikuti langkah-langkah prosedur pada metode well gain dan melakukan perhitungan. Setelah memperoleh data perhitungan, selanjutnya dilakukan metode trial and error hingga diperoleh parameter PID yang sesuai untuk sistem. Langkah terakhir adalah menghitung nilai waktu untuk menghasilkan lebar pulsa yang sesuai dengan frekuensi yang telah ditentukan.
Metode Penelitian
Objek Penelitian
Metode Perancangan
- Alat dan Bahan
- Tahapan Penelitian
Alat ini juga dapat memberikan nilai putaran yang dimodifikasi melalui input frekuensi tertentu dan akan menghasilkan putaran berdasarkan frekuensi. Penyearah setengah gelombang menggunakan 2 buah dioda berkapasitas 5 amp dan sebuah trafo center tapped (CT) berkapasitas 5 amp.
Perancangan Hardware
- Arduino
- Inverter Daya
- Optocoupler
- LCD
Rangkaian penyearah dan inverter menggunakan full bridge dipilih karena mampu menghasilkan perpindahan daya yang efisien dan pemanfaatan tegangan yang lebih optimal dibandingkan rangkaian setengah jembatan. Pengontrol mengambil keputusan berdasarkan kesalahan yang dibacanya dengan mengirimkan sinyal ke inverter SPWM untuk menghasilkan frekuensi yang benar. Inverter ini selain untuk mengubah tegangan DC menjadi tegangan AC sebagai masukan pada motor induksi, inverter ini juga digunakan untuk mengatur lebar pulsa.
Optical coupler ini diletakkan di dekat poros rotor untuk melihat atau merasakan putaran motor dengan membaca perbedaan warna gelap dan terang pada poros rotor. Gelap dan terang diperoleh dengan mengganti besi poros rotor dengan membuat garis-garis hitam putih.
Perancangan Software
- Perancangan PID
Analisis kerja
Pengujian
Diagram Alir Sistem Kendali
Hasil Dan Pembahasan
Pengujian Rise Time tanpa beban
Perbandingan Optimasi Rise time motor
Pengujian Steady State Time Motor Berbeban
Pengujian Efesiensi Daya
- Pengujian Efesiensi Daya Tanpa Beban
- Pengujian Efesiensi Daya Berbeban
- Pengukuran dan Perhitungan Efesiensi daya tanpa beban
- Pengukuran dan Perhitungan Efesiensi daya berbeban
Penutup
Saran







![Gambar 2.10 memperlihatkan sistem gabungan penyearah dan inverter satu fasa untuk mengemudikan sebuah motor induksi [7]](https://thumb-ap.123doks.com/thumbv2/123dok/11512406.0/26.892.225.699.479.720/gambar-memperlihatkan-sistem-gabungan-penyearah-inverter-mengemudikan-induksi.webp)
