UNIVERSITAS PEMBANGUNAN NASIONAL
“VETERAN” JAWA TIMUR FAKULTAS TEKNIK
PROGRAM STUDI TEKNIK MESIN
LAPORAN PRAKTIKUM GETARAN MEKANIK
Disusun oleh:
Muhammad Hendra Budi Satria 21036010077 Kelompok A
Semester Genap 2023/2024
ii
Dengan memanjatkan puji dan syukur kehadirat Allah SWT, serta rasa hormat yang tak terhingga, penulis menyampaikan salam dan salut kepada semua pihak yang telah membantu dan memberikan dukungan dalam penyusunan laporan praktikum ini.
Laporan praktikum ini disusun sebagai hasil dari kegiatan praktikum mata kuliah Getaran Mekanik yang diadakan dalam rangka menambah pemahaman dan keterampilan mahasiswa terkait fenomena getaran pada sistem mekanik.
Praktikum ini bertujuan untuk memberikan pemahaman mendalam tentang konsep-konsep dasar dalam getaran mekanik, sekaligus melibatkan mahasiswa dalam pengukuran, pengamatan, dan analisis terhadap perilaku sistem yang mengalami getaran. Laporan ini mencakup langkah-langkah praktikum, hasil pengamatan, serta analisis yang dilakukan untuk memahami karakteristik getaran yang terjadi pada sistem mekanik yang telah diteliti.
Penulis menyadari bahwa pembuatan laporan ini tidak terlepas dari bimbingan, arahan, dan dukungan dari berbagai pihak, baik dosen pengampu mata kuliah, asisten praktikum, maupun teman-teman sesama mahasiswa. Semoga laporan praktikum ini dapat memberikan manfaat dan kontribusi dalam memahami fenomena getaran mekanik, serta memberikan gambaran yang jelas tentang pengaplikasian konsep- konsep teori dalam pengukuran dan analisis sistem mekanik yang mengalami getaran.
Akhir kata, penulis menyampaikan permohonan maaf yang sebesar-besarnya apabila terdapat kekurangan atau kesalahan dalam penyusunan laporan ini. Kritik dan saran yang membangun selalu penulis harapkan untuk perbaikan di masa yang akan datang.
Surabaya, 13 November 2023
Muhammad Hendra Budi Satria
iii
COVER ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... iii
DAFTAR GAMBAR ... v
DAFTAR TABEL ... vii
DAFTAR LAMPIRAN ... viii
DAFTAR NOTASI ... ix
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 2
1.3 Tujuan ... 2
1.4 Manfaat ... 2
BAB II LANDASAN TEORI ... 3
2.1 Getaran ... 3
2.2 Klasifikasi Getaran ... 3
2.2.1 Getaran Bebas (Free Vibration) ... 4
2.2.2 Getaran Paksa (Force Vibration) ... 4
2.3 Peredaman Getaran ... 5
2.3.1 Viscous Damping ... 6
2.3.2 Coloumb Damping ... 7
2.3.3 Hysteristic Damping ... 8
2.4 Damping Ration ... 9
2.4.1 Overdamped ... 9
2.4.2 Critically Damped ... 10
2.4.3 Undamped ... 11
2.4.4 Underdamped ... 11
2.5 Natural Frequency ... 12
2.6 Half Band Power Method ... 13
iv
2.9 Axial Fan ... 15
BAB III METODE ... 17
3.1 Lokasi Praktikum ... 17
3.2 Kondisi Praktikum ... 17
3.2.1 Alat ... 17
3.2.2 Kondisi Praktikum ... 17
3.2.3 Proses Pengumpulan Data ... 18
3.3 Pengolahan dan Analisis Data ... 20
3.3 Flow Chart ... 21
BAB IV HASIL DAN PEMBAHASAN ... 22
4.1 Hasil Data ... 22
4.2 Pembahasan ... 22
4.2.1 Rubber A ... 22
4.2.2 Rubber B ... 25
4.2.3 Rubber C ... 28
BAB V KESIMPULAN DAN SARAN ... 31
5.1 Kesimpulan ... 31
5.2 Saran ... 32
DAFTAR PUSTAKA ... 33
LAMPIRAN ... 35
v
Gambar 2.1 Unsur Getaran ... 3
Gambar 2.2 Getaran Bebas ... 4
Gambar 2.3 Getaran Paksa ... 5
Gambar 2.4 Viscous Damping... 7
Gambar 2.5 Coloumb Damping ... 8
Gambar 2.6 Hysteretic Damping... 9
Gambar 2.7 Perbandingan dari jenis Damping Ratio... 12
Gambar 2.8 Natural Frequency ... 13
Gambar 2.9 Half Band Power ... 14
Gambar 2.10 Bandwidth... 15
Gambar 2.11 Axial Fan ... 16
Gambar 3.1 Skema alat praktikum ... 17
Gambar 3.2 Flow Chart ... 21
Gambar 4.1 Data Hasil Pengamatan ... 22
Gambar 4.2 Hasil Grafik Data Mentah ... 22
Gambar 4.3 Inputkan Pemrograman Untuk Hubungan Antara Amplitude dengan Frequency ... 23
Gambar 4.4 Grafik Hubungan Antara Amplitude dengan Frequency ... 23
Gambar 4.5 Inputkan Pemrograman Untuk Hubungan Antara Power dengan Frequency ... 23
Gambar 4.6 Grafik Hubungan Antara Power dengan Frequency Untuk (fn) ... 23
Gambar 4.7 Inputkan Pemrograman Untuk Bandwidth (f1 dan f2) ... 24
Gambar 4.8 Grafik Bandwidth ... 24
Gambar 4.9 Plotting untuk f1 pada Bandwidth ... 24
Gambar 4.10 Plotting untuk f2 pada Bandwidth ... 24
Gambar 4.11 Inputkan Pemrograman Untuk Data Mentah ... 25
Gambar 4.12 Hasil Grafik Data Mentah ... 25
vi
Gambar 4.14 Inputkan Pemrograman Untuk Hubungan Antara Power dengan
Frequency ... 26
Gambar 4.15 Inputkan Pemrograman Untuk Hubungan Antara Power dengan Frequency ... 26
Gambar 4.16 Grafik Hubungan Antara Power dengan Frequency Untuk (fn) ... 26
Gambar 4.17 Inputkan Pemrograman Untuk Bandwidth (f1 dan f2) ... 26
Gambar 4.18 Grafik Bandwidth ... 27
Gambar 4.19 Plotting untuk f1 pada Bandwidth ... 27
Gambar 4.20 Plotting untuk f2 pada Bandwidth ... 27
Gambar 4.21 Inputkan Pemrograman Untuk Data Mentah ... 28
Gambar 4.22 Hasil Grafik Data Mentah ... 28
Gambar 4.23 Inputkan Pemrograman Untuk Hubungan Antara Amplitude dengan Frequency ... 28
Gambar 4.24 Grafik Hubungan Antara Amplitude dengan Frequency ... 28
Gambar 4.25 Inputkan Pemrograman Untuk Hubungan Antara Power dengan Frequency ... 29
Gambar 4.26 Grafik Hubungan Antara Power dengan Frequency Untuk (fn) ... 29
Gambar 4.27 Inputkan Pemrograman Untuk Bandwidth (f1 dan f2) ... 29
Gambar 4.28 Grafik Bandwidth ... 29
Gambar 4.29 Plotting untuk f1 pada Bandwidth ... 30
Gambar 4.30 Plotting untuk f2 pada Bandwidth ... 30
vii
Tabel 3.1 Spesifikasi Axial Fan ... 18 Tabel 3.2 Data Hasil Pengamatan ... 19 Tabel 4.1 Data Hasil Pengamatan ... 22
viii
Lampiran 1. Rubber A... 35
Lampiran 2. Rubber B ... 35
Lampiran 3. Rubber C ... 35
Lampiran 4. Axial Fan ... 36
Lampiran 5. Settingan Aplikasi Phyphox ... 36
Lampiran 6. Susunan Alat Praktikum ... 36
Lampiran 7. Pengambilan Data Rubber A ... 37
Lampiran 8. Pengambilan Data Rubber B ... 37
Lampiran 9. Pengambilan Data Rubber C ... 37
Lampiran 10. Pengolahan Data Rubber A ... 38
Lampiran 11. Pengolahan Data Rubber B... 38
Lampiran 12. Pengolahan Data Rubber C... 38
ix 𝜁 = Damping ratio
𝑓1 = Lower frequency dari bandwidth 𝑓2 = Upper frequency dari bandwidth 𝑓𝑛 = Natural frequency dari sistem 𝜔𝑛 = Natural frequency dari sistem 𝑘 = Kekakuan pegas
𝑚 = Massa
BAB I
PENDAHULUAN
1.1 Latar Belakang
Getaran mekanik adalah fenomena perubahan periodik dalam posisi, kecepatan, atau percepatan suatu benda atau sistem. Getaran mekanik tidak hanya merupakan aspek alami dari dunia kita, seperti lonceng yang berdenting atau air yang mengalir, namun juga isu yang sangat relevan dalam bidang teknik dan ilmu pengetahuan lainnya (Kunlestiowati, et al., 2010).
Pentingnya pemahaman tentang getaran mekanik terletak pada banyaknya aplikasi teknologi yang menggunakan konsep ini. Getaran mekanik dapat ditemukan dalam mesin, bangunan, struktur jembatan, dan banyak sekali aplikasi teknologi lainnya. Maka, pemahaman yang baik tentang fenomena ini dapat membantu dalam perancangan teknologi yang lebih baik serta menghindari kegagalan atau kerusakan pada sistem (Windyandari &
Zakki, 2014)
Dalam ilmu fisika, getaran mekanik dijelaskan sebagai suatu keadaan ketika suatu objek bergerak mempunyai kecepatan dan percepatan periodik, atau bergerak mundur-maju di sekitar titik keseimbangan. Dalam fenomena ini, terdapat beberapa faktor yang perlu diperhatikan, seperti frekuensi, amplitudo, dan bentuk gelombang getaran. Pengukuran getaran mekanik pada sistem atau struktur secara matematis dan eksperimental menjadi penting untuk memperoleh informasi yang akurat tentang sifat dan karakteristik getaran yang terjadi (Risnadiputra & Munasir, 2022)
Oleh karena itu, penelitian mengenai getaran mekanik dianggap penting seiring dengan berkembangnya teknologi yang semakin canggih dan kompleks. Dengan memahami prinsip dasar dan karakteristik getaran mekanik, maka dapat dilakukan perbaikan, perawatan, dan pengembangan teknologi yang lebih efektif serta mencegah terjadinya kegagalan dan kerusakan pada sistem.
1.2 Rumusan Masalah
Dalam konteks getaran mekanik, terdapat beberapa masalah yang perlu dipecahkan, antara lain:
1. Bagaimana variasi dalam menggunakan bahan karet sebagai peredam dapat memengaruhi tingkat getaran yang dihasilkan oleh kipas?
2. Metode analisis apa yang diterapkan untuk mengukur tingkat getaran pada kipas?
3. Apa faktor-faktor yang mungkin memengaruhi hasil pengukuran dan analisis getaran pada kipas?
1.3 Tujuan
Tujuan dari praktikum ini adalah:
1. Memahami dampak dari variasi penggunaan bahan karet sebagai peredam terhadap tingkat getaran yang timbul dari kipas.
2. Memahami teknik analisis yang digunakan untuk mengukur tingkat getaran pada kipas.
3. Memahami faktor-faktor yang mungkin memengaruhi hasil pengukuran dan analisis getaran pada kipas.
1.4 Manfaat
Manfaat dari penelitian ini meliputi:
1. Mahasiswa praktik dapat memahami dampak variasi penggunaan bahan karet sebagai peredam terhadap tingkat getaran yang dihasilkan oleh kipas.
2. Mahasiswa praktik dapat memahami teknik analisis yang digunakan untuk mengukur tingkat getaran pada kipas.
3. Mahasiswa praktik dapat memahami faktor-faktor yang mungkin memengaruhi hasil pengukuran dan analisis getaran pada kipas.
BAB II
LANDASAN TEORI
2.1 Getaran
Getaran merupakan pergerakan bolak-balik yang melintasi titik kesetimbangan.
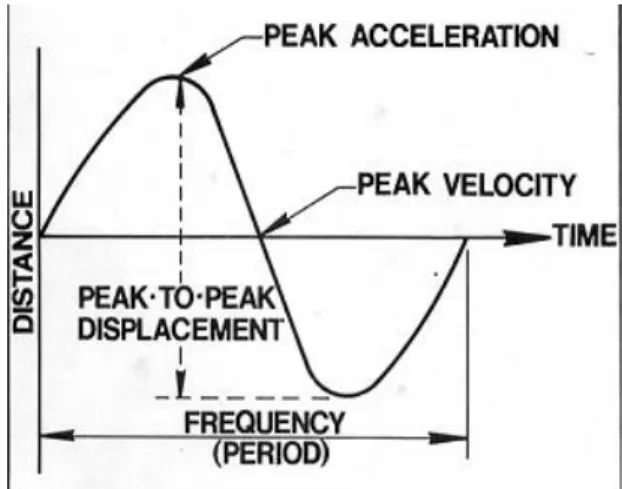
Kesetimbangan di sini mengacu pada kondisi di mana suatu beban tetap diam tanpa adanya gaya yang memengaruhinya atau pada posisi tertentu. Semua objek yang memiliki massa dan elastisitas memiliki kemampuan untuk bergetar. Oleh karena itu, sebagian besar mesin dan struktur rekayasa mengalami getaran hingga tingkat tertentu, dan desainnya umumnya memerlukan pertimbangan terhadap sifat osilasi. Getaran dapat dikelompokkan menjadi beberapa jenis, termasuk getaran bebas dan dipaksa, getaran yang teredam dan tidak teredam, serta getaran yang bersifat deterministik dan acak. Vibrasi atau getaran diukur dengan tiga parameter utama, yaitu fase, frekuensi, dan amplitudo. Seluruh konsep ini memberikan landasan bagi pemahaman dan pengembangan dalam bidang rekayasa, memberikan fondasi yang kokoh untuk perancangan sistem yang efisien dan stabil (Majanasastra, 2014).
Gambar 2.1 Unsur Getaran 2.2 Klasifikasi Getaran
Pengklasifikasian getaran adalah upaya untuk mengelompokkan berbagai jenis getaran berdasarkan sejumlah kriteria tertentu. Di bawah ini, terdapat beberapa pengelompokan getaran yang dapat ditemui:
2.2.1 Getaran Bebas (Free Vibration)
Getaran bebas atau free vibration terjadi saat suatu sistem mekanik bergetar setelah diberikan gangguan atau dorongan awal dan tanpa adanya pengaruh gaya eksternal yang terus-menerus. Dalam kata lain, setelah diberikan suatu impuls, sistem tersebut akan bergerak secara alami tanpa adanya pengaruh tambahan dari luar. Contoh sederhana dari getaran bebas adalah pegas yang digantung dengan beban di ujungnya. Jika beban tersebut ditarik ke bawah dan kemudian dilepaskan, pegas akan bergetar maju-mundur secara berulang. Selama getaran ini, tidak ada gaya atau dorongan tambahan yang diberikan pada sistem pegas dan beban hanya saling berinteraksi.
Analisis getaran bebas melibatkan pemahaman tentang parameter-parameter seperti massa sistem, kekakuan pegas, dan adanya peredaman. Solusi matematis dari persamaan gerak sistem ini memungkinkan kita untuk menentukan karakteristik-karakteristik penting, seperti frekuensi alami getaran dan modus getar sistem. Dalam konteks rekayasa, pemahaman terhadap getaran bebas memainkan peran penting dalam merancang struktur yang dapat mengatasi atau memanfaatkan getaran tersebut, tergantung pada kebutuhan aplikasi (Manubulu, et al., 2020).
Gambar 2.2 Getaran Bebas 2.2.2 Getaran Paksa (Force Vibration)
Getaran paksa atau Force Vibration, terjadi ketika suatu sistem getar menerima dorongan atau gaya luar yang terus-menerus. Dalam konteks ini,
"paksa" merujuk pada fakta bahwa getaran tersebut diinduksi atau dipicu oleh suatu gaya luar yang diterapkan secara terus-menerus pada sistem. Perbedaan
utama antara getaran paksa dan getaran bebas adalah bahwa dalam getaran paksa, ada pengaruh luar yang secara terus-menerus mempertahankan getaran sistem.
Sumber gaya luar ini dapat berasal dari berbagai sumber, seperti mesin berputar, mesin pemukul, atau gaya periodik lainnya yang diaplikasikan pada suatu struktur atau sistem.
Analisis getaran paksa melibatkan pemahaman tentang respons sistem terhadap gaya eksternal tersebut, termasuk amplitudo, frekuensi, dan fase getaran.
Beberapa faktor penting dalam analisis getaran paksa melibatkan hubungan antara frekuensi getaran eksternal dengan frekuensi alami sistem tersebut. Getaran paksa dapat ditemui dalam berbagai aplikasi, termasuk pada struktur bangunan, mesin, dan sistem lainnya di mana adanya gaya eksternal yang terus-menerus berpengaruh pada perilaku getaran sistem (Soeharsono, et al., 2011).
Gambar 2.3 Getaran Paksa 2.3 Peredaman Getaran
Peredaman getaran dalam konteks getaran mekanik merujuk pada upaya untuk mengurangi atau mengendalikan efek negatif getaran yang dihasilkan oleh suatu sistem. Getaran mekanik dapat terjadi dari berbagai sumber, seperti mesin, peralatan industri, atau guncangan eksternal, dan dapat mengakibatkan kerusakan struktural, kebisingan, dan ketidaknyamanan. Salah satu metode umum peredaman getaran adalah penggunaan bahan elastis, seperti karet, yang memiliki sifat absorpsi yang baik terhadap energi getaran. Pemilihan bahan ini membantu meminimalkan transmisi getaran antar komponen dalam sistem, menyediakan lapisan peredaman yang efektif.
Selain itu, sistem pegas dan massa juga digunakan untuk meredam getaran dengan cara menyediakan mekanisme penyerap energi. Dengan menambahkan sistem pegas
dan massa yang tepat, dapat dibentuk suatu isolator getaran yang mampu meredam getaran pada frekuensi tertentu. Metode lain termasuk penggunaan peredaman hidraulis, yang memanfaatkan cairan atau minyak untuk meredam getaran. Sistem peredaman ini dapat bekerja pada berbagai rentang frekuensi, memberikan solusi yang efektif untuk meredam getaran pada sistem mekanik yang kompleks. Keseluruhan, penerapan berbagai metode peredaman getaran ini menjadi krusial dalam memastikan kinerja optimal, keandalan, dan kenyamanan sistem mekanik (Widyanto, et al., 2016).
2.3.1 Viscous Damping
Viscous damping (peredaman kental) adalah salah satu metode peredaman dalam analisis getaran mekanik yang melibatkan penggunaan gaya peredam yang berbanding lurus dengan kecepatan relatif antara dua komponen yang bergetar.
Dalam sistem peredaman kental, gaya peredam ini proporsional terhadap kecepatan relatif antara massa yang bergetar dan medium peredamnya. Prinsip dasar di balik viscous damping adalah bahwa semakin cepat massa bergerak, semakin besar gaya peredam yang dihasilkan. Penerapan viscous damping membantu meredam energi getaran dengan mengubah energi kinetik sistem menjadi energi panas melalui gesekan internal dalam medium peredam.
Keuntungan dari peredaman kental adalah bahwa tingkat peredaman dapat diatur dengan mudah melalui kontrol viskositas medium peredam. Namun, perlu diingat bahwa peredaman ini cenderung efektif pada rentang frekuensi tertentu dan dapat mempengaruhi karakteristik dinamis sistem. Dalam analisis getaran mekanik, viscous damping sering dimodelkan sebagai elemen peredam dalam suatu sistem, dan koeffisien peredaman kental (disebut juga koefisien viskositas) digunakan untuk menggambarkan sejauh mana energi getaran direduksi. Model ini memungkinkan insinyur untuk memahami dan merancang sistem dengan mempertimbangkan efek peredaman terkait kecepatan relatif antara massa dan medium peredam (Lee, 2020)
Gambar 2.4 Viscous Damping 2.3.2 Coloumb Damping
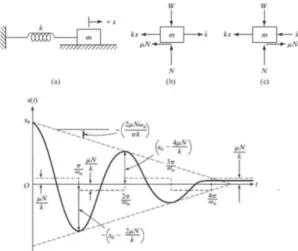
Coulomb damping (peredaman Coulomb) adalah suatu bentuk peredaman dalam analisis getaran mekanik yang muncul akibat adanya gesekan geser antara dua permukaan yang bergerak satu sama lain. Dalam sistem peredaman Coulomb, gaya peredam bergantung pada gaya gesekan yang muncul sebagai hasil dari kontak relatif antara dua komponen yang bergetar. Gaya peredam Coulomb diukur sebagai produk antara koefisien gesekan dan gaya normal yang diterapkan pada dua permukaan tersebut. Sebagai tambahan terhadap pengurangan energi getaran, peredaman Coulomb dapat menyebabkan fenomena menarik yang disebut stick- slip. Fenomena ini terjadi ketika dua permukaan yang bergesekan tampaknya
"melipat" satu sama lain pada titik tertentu dalam siklus getaran.
Namun, ketika gaya gesekan melebihi ambang tertentu, permukaan tersebut
"tersandung" dan bergerak secara tiba-tiba, menyebabkan lonjakan kecepatan dan getaran. Efek ini seringkali diinginkan atau harus diperhitungkan dalam analisis sistem yang mengalami gesekan Coulomb. Pemodelan matematis dari peredaman Coulomb melibatkan penggunaan koefisien gesekan statis dan dinamis, yang menunjukkan tingkat gesekan pada kondisi diam dan selama pergerakan relatif.
Pemahaman terperinci tentang karakteristik peredaman Coulomb penting dalam desain dan analisis sistem yang melibatkan gesekan seperti pada mekanisme gesekan, rem, atau sistem penyekat (Marino & Cicirello , 2020).
Gambar 2.5 Coloumb Damping 2.3.3 Hysteristic Damping
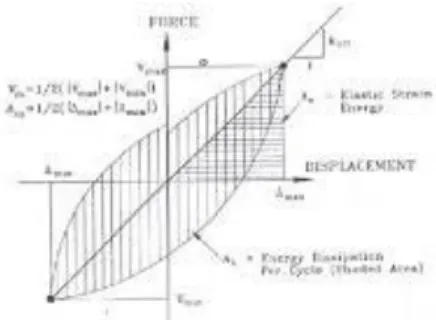
Hysteretic damping (peredaman histeretik) adalah jenis peredaman dalam getaran mekanik yang timbul akibat sifat histeresis material dalam sistem.
Histeresis adalah fenomena di mana respons material terhadap suatu gaya atau deformasi bergantung pada sejarah beban yang diterapkan. Dalam konteks getaran mekanik, histeresis dapat terjadi ketika material dalam sistem mengalami siklus beban yang berulang, seperti pada perubahan arah getaran atau deformasi.
Peredaman histeretik dapat berasal dari dua sumber utama: peredaman histeretik material dan peredaman histeretik struktural. Peredaman histeretik material terjadi karena sifat histeresis pada material komponen sistem, sementara peredaman histeretik struktural muncul akibat histeresis dalam hubungan gaya-deformasi antar komponen struktural.
Efek utama dari peredaman histeretik adalah transformasi energi mekanik menjadi energi panas selama siklus getaran, menyebabkan meredamnya amplitudo getaran. Meskipun peredaman histeretik dapat berguna dalam mengurangi amplitudo getaran dan melindungi sistem dari potensi kerusakan, seringkali diinginkan untuk meminimalkan peredaman histeretik karena dapat menghasilkan hilangnya energi yang dapat merugikan efisiensi sistem. Pemahaman peredaman histeretik penting dalam analisis dan desain struktur dan komponen mekanik,
terutama pada sistem yang mengalami siklus beban yang berulang, seperti dalam aplikasi getaran atau gempa bumi (Genta & Amati, 2010).
Gambar 2.6 Hysteretic Damping 2.4 Damping Ratio
Damping ratio atau rasio peredaman adalah parameter penting dalam analisis getaran mekanik yang mengukur seberapa cepat suatu sistem mekanik atau struktur meredam getaran setelah menerima dorongan atau gangguan. Damping ratio dinyatakan sebagai rasio antara peredaman aktual suatu sistem terhadap peredaman kritis yang dibutuhkan untuk menghasilkan osilasi yang tidak terbatas atau resonansi.
Damping ratio memainkan peran penting dalam desain struktur dan sistem mekanik karena memengaruhi respons dinamis dan stabilitas sistem terhadap getaran.
Pemilihan nilai damping ratio yang tepat dapat membantu menghindari resonansi yang merugikan dan meningkatkan kenyamanan serta keandalan sistem. Analisis damping ratio seringkali terlibat dalam pemodelan matematis dan eksperimen untuk memastikan bahwa sistem mekanik berkinerja sesuai dengan persyaratan yang diinginkan (Ge & Rice, 2018).
𝜁 = 𝑓2−𝑓1
2𝑓𝑛 ...(2.1) 2.4.1 Overdamped
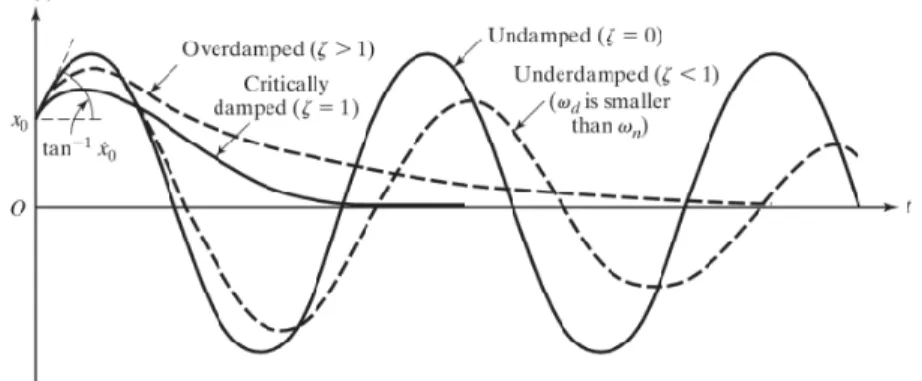
Dalam konteks getaran mekanik, kondisi overdamped (damping berlebih) merujuk pada suatu sistem atau struktur yang mengalami perlambatan getaran dengan cepat tanpa osilasi berlebihan. Sistem overdamped dicirikan oleh nilai damping ratio yang melebihi satu (ζ > 1). Pada kondisi overdamped, peredaman
lebih dari cukup untuk mencegah sistem dari osilasi yang berlanjut, dan respons sistem terhadap gangguan atau getaran eksternal menghasilkan pergerakan yang halus dan lambat menuju posisi keseimbangan.
Keuntungan utama dari kondisi overdamped adalah ketahanan terhadap fenomena resonansi dan osilasi berlebihan. Hal ini sering diinginkan dalam beberapa aplikasi, terutama ketika kestabilan dan ketahanan terhadap perubahan tiba-tiba diperlukan. Namun, perlu dicatat bahwa sistem overdamped mungkin memerlukan waktu lebih lama untuk mencapai posisi keseimbangan setelah mendapat gangguan, karena energi getaran cepat berubah menjadi energi panas dalam proses peredaman yang kuat. Sebagai hasilnya, sifat overdamped sering diterapkan pada sistem atau struktur yang memerlukan respons yang halus dan terkontrol tanpa osilasi berlebihan.
2.4.2 Critically Damped
Critically damped (damping kritis) merujuk pada kondisi di mana suatu sistem mekanik mengalami peredaman optimal, mencapai keseimbangan tanpa osilasi berlebihan dan tanpa terjadinya fenomena resonansi. Dalam analisis getaran mekanik, kondisi damping kritis terjadi ketika nilai damping ratio ( ζ = 1). Sistem yang damping kritis mencapai keseimbangan dengan kecepatan maksimum tanpa overshoot, sehingga meminimalkan waktu yang diperlukan untuk meredam dan mencapai posisi keseimbangan setelah mendapat gangguan.
Keunikan dari kondisi damping kritis adalah bahwa respons sistem mencapai batas optimal antara waktu yang diperlukan untuk meredam dan minimalkan osilasi berlebihan. Oleh karena itu, dalam beberapa aplikasi di mana penting untuk mencapai respon yang cepat tanpa overshoot yang signifikan, seperti dalam sistem kontrol atau rem, kondisi damping kritis dapat diinginkan. Sistem damping kritis dapat ditemui dalam berbagai konteks, dari sistem suspensi mobil hingga sistem mekanisme pegas-massa, dan pemahaman tentang sifat damping kritis menjadi krusial dalam desain dan analisis sistem mekanik yang melibatkan getaran.
2.4.3 Undamped
Dalam konteks getaran mekanik, kondisi undamped (tanpa peredaman) merujuk pada suatu sistem atau struktur yang tidak mengalami kehilangan energi getaran seiring waktu. Dalam kondisi ini, tidak ada gaya peredam atau gesekan yang bekerja pada sistem tersebut, sehingga getaran yang dihasilkan akan terus berlangsung tanpa berkurang. Sistem undamped dapat memiliki respons osilatori yang berlangsung tanpa henti pada frekuensi naturalnya dengan damping ratio yaitu ( ζ = 0). Ketika suatu sistem mengalami getaran tanpa peredaman, energi getaran tetap terjaga, dan amplitudo getaran dapat meningkat tanpa batas jika tidak ada gaya luar yang membatasi atau mengontrolnya.
Meskipun kondisi undamped berguna dalam memahami sifat dasar getaran pada sistem mekanik, seringkali dalam aplikasi nyata, peredaman diperlukan untuk mengendalikan osilasi dan mencegah terjadinya resonansi yang merugikan. Oleh karena itu, dalam desain dan analisis sistem getaran mekanik, pertimbangan peredaman menjadi penting untuk memastikan kinerja yang stabil dan menghindari efek yang merugikan seperti vibrasi berlebihan atau kerusakan struktural.
2.4.4 Underdamped
Underdamped, atau damping kurang, merujuk pada kondisi di mana suatu sistem mekanik mengalami peredaman yang kurang cukup sehingga dapat menghasilkan osilasi yang berlangsung lebih lama dari yang diinginkan. Dalam analisis getaran mekanik, kondisi underdamped terjadi ketika nilai damping ratio ( ζ < 1). Sistem underdamped memberikan respons osilatori yang melibatkan overshoot, di mana amplitudo respon melebihi nilai keseimbangan sebelum akhirnya mencapai posisi stabil. Meskipun sistem underdamped mungkin memberikan respon yang cepat terhadap gangguan awal, efek overshoot dan waktu yang diperlukan untuk meredam dapat menyebabkan ketidakstabilan atau ketidaknyamanan dalam beberapa aplikasi.
Kondisi underdamped dapat ditemui dalam berbagai sistem mekanik, seperti suspensi kendaraan atau pegas-massa. Pemahaman terhadap sifat damping dalam sistem underdamped menjadi penting dalam desain dan kontrol untuk mengoptimalkan kinerja dan meningkatkan kenyamanan sistem. Sebagai contoh, dalam sistem suspensi mobil, dapat diinginkan untuk mengatur tingkat peredaman sehingga mencapai keseimbangan antara waktu respon yang cepat dan minimalkan efek overshoot untuk meningkatkan kenyamanan dan stabilitas (Rao, 2011).
Gambar 2.7 Perbandingan dari jenis Damping Ratio 2.5 Natural Frequency
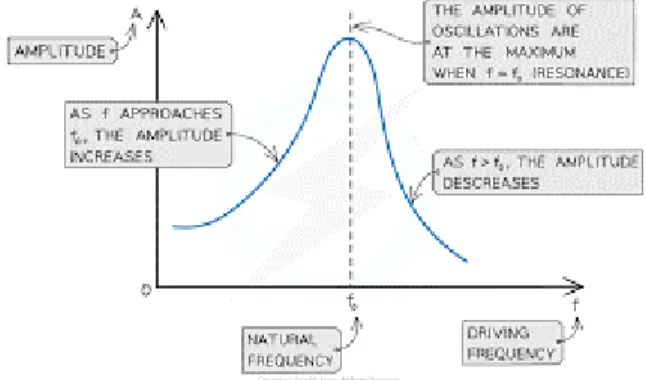
Frekuensi alami atau natural frequency dalam konteks getaran mekanik adalah frekuensi intrinsik di mana suatu sistem mekanik akan bergetar secara alami ketika tidak ada gaya eksternal yang diterapkan. Frekuensi alami ditentukan oleh karakteristik fisik dan geometri sistem, termasuk massa, kekakuan, dan distribusi massa. Ketika suatu sistem mekanik diganggu atau dipindahkan dari posisi keseimbangan, ia akan cenderung bergetar pada frekuensi alaminya. Konsep frekuensi alami sangat penting dalam analisis getaran mekanik karena dapat mempengaruhi respons dinamis dan stabilitas sistem.
Pada frekuensi alami, resonansi dapat terjadi, yaitu saat amplitudo getaran meningkat secara signifikan jika frekuensi pemicu getaran mendekati frekuensi alaminya. Desain struktur atau komponen mekanik sering mempertimbangkan frekuensi alami untuk menghindari kondisi resonansi yang dapat merugikan.
Pemahaman terhadap frekuensi alami membantu insinyur dan perancang sistem untuk mengoptimalkan kinerja dan keandalan struktur atau peralatan mekanik (Zhang, et al., 2021).
Gambar 2.8 Natural Frequency
Perhitungan rumus natural frekuensi dapat menggunakan rumus seperti berikut:
𝜔𝑛 = √𝑘
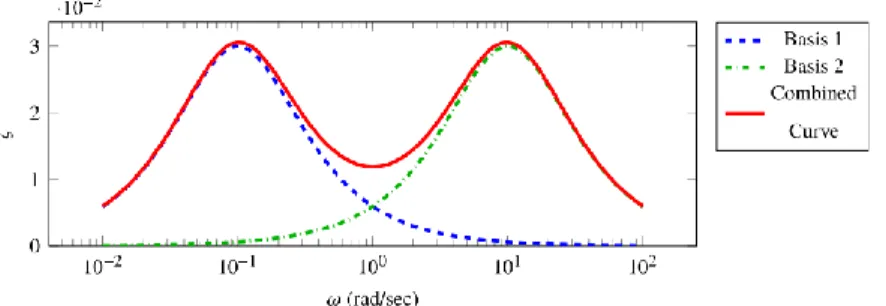
𝑚...(2.2) 2.6 Half Band Power Method
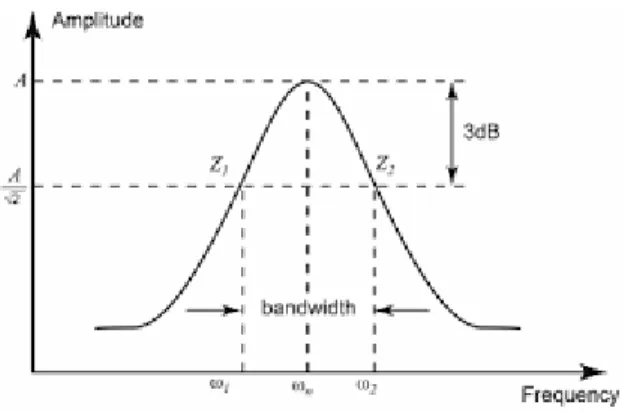
Half Band Power Method merupakan salah satu metode untuk menganalisa respons frekuensi pada sistem getaran mekanik. Metode ini digunakan untuk memperkirakan pengaruh beberapa parameter terhadap respons frekuensi pada sistem.
Metode ini menggunakan frekuensi pada setengah jalur antara dua titik resonansi pada respons frekuensi. Kemudian, digunakan faktor penguatan dalam perhitungan untuk mendapatkan respons frekuensi pada frekuensi yang diinginkan. Metode ini sangat berguna dalam menganalisis respons frekuensi pada sistem dengan mode banyak, seperti pada struktur bangunan yang rumit.
Metode Half Band Power juga digunakan untuk menganalisa mode getaran pada struktur mekanik, seperti jembatan, bangunan, dan mesin. Metode ini mengasumsikan bahwa mode getaran pada sistem getaran mekanik terletak pada frekuensi yang sama dengan setengah jalur yang saling terpisah. Hal ini memungkinkan penentuan frekuensi resonansi pada sistem hanya dengan data frekuensi setengah jalur antara dua titik resonansi saja. Metode ini sering digunakan oleh para insinyur dalam menganalisis
integritas struktur mekanik dan mengidentifikasi sumber masalah pada sistem yang terjadi pada frekuensi tertentu. Dengan demikian, metode Half Band Power Method sangat penting dalam analisis getaran mekanik dan membantu para insinyur memahami respons frekuensi pada sistem secara efektif (Zhang & Ma, 2013).
Gambar 2.9 Half Band Power 2.7 Bandwidth
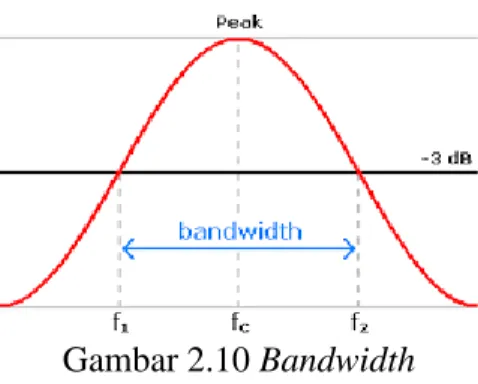
Dalam konteks getaran mekanik, bandwidth merujuk pada rentang frekuensi di sekitar frekuensi pusat suatu sistem atau komponen yang mengalami getaran.
Bandwidth mencakup frekuensi-frekuensi di mana respons sistem atau komponen tidak secara signifikan merosot. Dalam istilah sederhana, bandwidth memberikan gambaran tentang seberapa lebar atau sempitnya rentang frekuensi yang dapat diakomodasi atau dihasilkan oleh suatu sistem tanpa mengalami penurunan kinerja yang signifikan.
Pentingnya konsep bandwidth terletak pada pemahaman karakteristik dinamis sistem, terutama dalam konteks analisis getaran. Mengetahui bandwidth membantu insinyur untuk merancang sistem yang responsif terhadap berbagai frekuensi yang mungkin terjadi, atau sebaliknya, membatasi respons terhadap frekuensi tertentu untuk menghindari fenomena resonansi yang dapat merugikan. Bandwidth dapat diukur dalam Hertz (Hz) dan biasanya dinyatakan sebagai rentang frekuensi di mana respons sistem atau komponen tetap di atas batas ambang tertentu (Naval, et al., 2022).
Gambar 2.10 Bandwidth 2.8 Rubber
Rubber atau karet dalam konteks getaran mekanik sering digunakan sebagai bahan elastomer untuk peredaman getaran. Sifat elastis karet memungkinkannya menyerap dan meredam energi getaran yang dihasilkan oleh mesin atau peralatan mekanik. Karet umumnya digunakan dalam bentuk bantalan, isolator, atau elemen peredam untuk mengurangi transmisi getaran dari sumber ke struktur atau perangkat terkait. Kekakuan dan daya serap getaran karet bergantung pada formulasi dan konstruksi bahan tersebut, sehingga dapat dirancang untuk meredam getaran pada frekuensi tertentu atau dalam kondisi lingkungan tertentu.
Selain sebagai bahan peredam getaran, karet juga dapat digunakan dalam elemen- elemen getaran mekanik lainnya, seperti sabuk, karet pegas, atau elemen elastis dalam sistem suspensi. Keunggulan karet dalam peredaman getaran melibatkan kemampuannya untuk menyerap energi getaran dengan baik, elastisitas yang tinggi, dan daya tahan terhadap deformasi. Oleh karena itu, dalam rekayasa getaran mekanik, pemilihan karet sebagai material peredam dapat membantu meningkatkan kenyamanan, keamanan, dan kinerja sistem mekanik secara keseluruhan (Yadav &
Tiwari, 2017).
2.9 Axial Fan
Axial fan atau kipas aksial, adalah jenis kipas yang dirancang untuk menggerakkan udara sepanjang sumbu utama rotor, sejajar dengan arah poros putar. Dalam konteks getaran mekanik, axial fan menghasilkan getaran mekanik yang dapat memengaruhi kinerja dan keandalannya. Rotasi kipas dapat menyebabkan getaran aksial dan radial
yang memengaruhi bagian-bagian mekanis seperti bantalan dan struktur pendukung.
Oleh karena itu, analisis getaran pada axial fan penting untuk memastikan kinerja yang optimal, mencegah kegagalan bantalan, dan mengidentifikasi potensi masalah struktural.
Faktor-faktor yang dapat mempengaruhi getaran axial fan melibatkan seimbang dinamis, ketidakseimbangan massa, dan keausan pada bantalan. Pemantauan dan pemeliharaan rutin dapat membantu mendeteksi potensi masalah getaran sejak dini, sementara desain yang baik dan pemilihan bahan dapat membantu mengurangi dampak getaran pada kipas aksial. Analisis getaran mekanik menjadi alat yang penting dalam memastikan kipas axial beroperasi secara efisien, handal, dan aman (Pogorelov, et al., 2016)
Gambar 2.11 Axial Fan
BAB III METODE
3.1 Lokasi Praktikum
Untuk pelaksanaan Praktikum Getaran Mekanik modul 1 yang berlokasi pada Laboratorium Ergonomi lantai 1 Gedung II Fakultas Teknik Universitas Pembangunan
“Veteran” Jawa Timur pada 8 November 2023 pukul 15.02 WIB.
3.2 Kondisi Praktikum 3.2.1 Alat
Dalam melakukan Praktikum Getaran Mekanik ini diperlukan alat-alat sebagai berikut:
1. Software Matlab 2. Aplikasi Phyphox 3. Handphone 4. Rubber 5. Fan Axial 3.2.2 Kondisi Praktikum
Berikut ini merupakan skema alat praktikum dapat dilihat pada gambar di bawah ini:
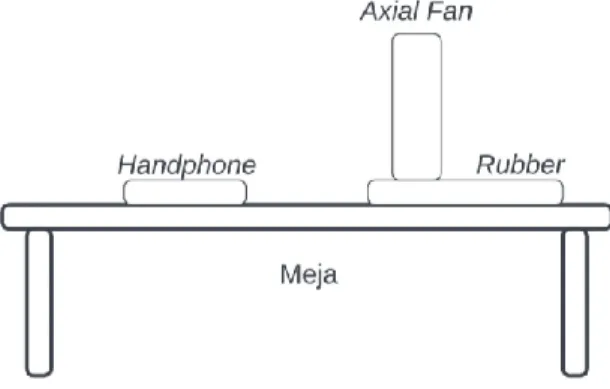
Gambar 3.1 Skema alat praktikum
Penataan skema alat praktikum pada gambar 3.1 diatas terdiri dari meja sebagai media getaran yang akan di ukur, rubber sebagai peredam getaran pada axial fan, handphone sebagai alat pendeteksi getaran, dan axial fan sebagai sumber getaran yang dihasilkan.
Tabel 3.1 Spesifikasi Axial Fan
Pengujian dilakukan menggunakan tiga jenis peredam rubber yang memiliki spesifikasi yang berbeda serta menggunakan axial fan dengan spesifikasi pada tabel 3.1 di atas.
3.2.3 Proses Pengumpulan Data a. Proses Sebelum Praktikum
1. Download aplikasi Phyphox pada Playstore/Appstore.
2. Siapkan Handphone dengan keadaan tidak menggunakan Casing.
3. Pastikan rubber dan axial fan yang akan digunakan sudah terletak diatas meja.
4. Sesuaikan kondisi dengan garis yang telah ditentukan.
b. Proses Praktikum Damping Ratio
1. Buka Aplikasi Phyphox pada Handphone.
2. Letakkan rubber yang telah disiapkan pas dibawah axial fan.
3. Pilih menu “Acceleration without g”.
4. Pada titik tiga, di sudut kanan atas, Centang bagian “Timed Run”
NO Parameter Besaran
1 Merek Happy
2 Tipe 120×120×38HSL
3 Voltase AC220/240V
4 Daya 21W
5 Arus 0.14A
6 Buatan China
7 Dimensi 120mm×120mm×38mm
5. Masukkan waktu 3s untuk “Start Delay” Dan 20s di bagian
“Experiment Duration”.
6. Serta aktifkan “Start Sound” pada “Acoustic Signals”. Kemudian tekan “Ok”.
7. Setelah itu tekan simbol segitiga pada bagian atas aplikasi untuk memulai mengambil data.
8. Lalu jika waktu habis, maka sudah pengambilan data sudah selesai dilakukan, dilanjut dengan proses setelah praktikum.
c. Proses Setelah Praktikum
1. Silakan mengambil tangkapan layar dari data yang telah didapat 2. Pada titik tiga, di sudut kanan atas, tekan menu “Export Data”
3. Export ke “Excel” lalu “Ok”.
4. Kemudian data yang didapat pada Excel, dijadikan grafik dan dilakukan perhitungan yang nantinya akan diberi perhitungan untuk pelaporan praktikum.
Dari praktikum getaran mekanik tersebut didapatkan data hasil pengamatan yang dapat dilihat di bawah ini :
Tabel 3.2 Data Hasil Pengamatan
Rubber F1 F2 Fn Zeta (ζ)
A 40,6142 40,6426 40,6259 0,00034707 B 40,8852 40,9349 40,9162 0,00060734 C 41,3059 41,3355 41,3239 0,0000045693
3.3 Pengolahan dan Analisis Data
Berdasarkan data yang telah diperoleh, dilakukan perhitungan secara matematis untuk mendapatkan hasil dari damping ratio atau ζ (zeta) pada rubber A, rubber B, dan rubber C. Berikut perhitungan maatematis untuk mendapatkan dampng ratio :
a. Rubber A
𝜁 = 𝑓2− 𝑓1 2𝑓𝑛
𝜁 = 40.6426 − 40.6142 2 × 40.6259 𝜁 = 0.00034707 b. Rubber B
𝜁 = 𝑓2− 𝑓1 2𝑓𝑛
𝜁 = 40.9349 − 40.8852 2 × 40.9162 𝜁 = 0.00060734 c. Rubber C
𝜁 = 𝑓2− 𝑓1 2𝑓𝑛
𝜁 = 41.3355 − 41.3059 2 × 41.3239 𝜁 = 0.0000045693
3.3 Flow Chart
Gambar 3.2 Flow Chart
BAB IV
HASIL DAN PEMBAHASAN
4.1 Hasil Data
Dari hasil pengolahan data Praktikum Getaran Mekanik modul 1, didapatkan hasil data seperti pada tabel dibawah ini :
Tabel 4.1 Data Hasil Pengamatan
Rubber F1 F2 Fn Zeta (ζ)
A 40,6142 40,6426 40,6259 0,00034707 B 40,8852 40,9349 40,9162 0,00060734 C 41,3059 41,3355 41,3239 0,0000045693 4.2 Pembahasan
Pada praktikum getaran mekanik kali ini, variasi material rubber peredam digunakan untuk meneliti dampaknya terhadap getaran yang dihasilkan. Berikut data- data tiap rubber yang telah diolah di Software Matlab :
4.2.1 Rubber A
Gambar 4.1 Data Hasil Pengamatan
Gambar 4.2 Hasil Grafik Data Mentah
Gambar 4.3 Inputkan Pemrograman Untuk Hubungan Antara Amplitude dengan Frequency
Gambar 4.4 Grafik Hubungan Antara Amplitude dengan Frequency
Gambar 4.5 Inputkan Pemrograman Untuk Hubungan Antara Power dengan Frequency
Gambar 4.6 Grafik Hubungan Antara Power dengan Frequency Untuk (fn)
Gambar 4.7 Inputkan Pemrograman Untuk Bandwidth (f1 dan f2)
Gambar 4.8 Grafik Bandwidth
Gambar 4.9 Plotting untuk f1 pada Bandwidth
Gambar 4.10 Plotting untuk f2 pada Bandwidth
Pada pengolahan data Rubber A seperti gambar di atas pada Software Matlab didapatkan beberapa data seperti : 𝑓1 sebesar 40,6142; 𝑓2 sebesar 40,6426; dan untuk 𝑓𝑛 sebesar 40,6259. Dari data yang diperoleh tersebut, maka didapatkan hasil dari ζ (zeta) sebesar 0,00034707 dengan hasil damping ratio kurang dari 1 (ζ < 1). Maka dapat dinyatakan dari grafik tersebut adalah Underdamped.
4.2.2 Rubber B
Gambar 4.11 Inputkan Pemrograman Untuk Data Mentah
Gambar 4.12 Hasil Grafik Data Mentah
Gambar 4.13 Inputkan Pemrograman Untuk Hubungan Antara Amplitude dengan Frequency
Gambar 4.14 Inputkan Pemrograman Untuk Hubungan Antara Power dengan Frequency
Gambar 4.15 Inputkan Pemrograman Untuk Hubungan Antara Power dengan Frequency
Gambar 4.16 Grafik Hubungan Antara Power dengan Frequency Untuk (fn)
Gambar 4.17 Inputkan Pemrograman Untuk Bandwidth (f1 dan f2)
Gambar 4.18 Grafik Bandwidth
Gambar 4.19 Plotting untuk f1 pada Bandwidth
Gambar 4.20 Plotting untuk f2 pada Bandwidth
Pada pengolahan data Rubber B seperti gambar di atas pada Software Matlab didapatkan beberapa data seperti : 𝑓1 sebesar 40,8852; 𝑓2 sebesar 40,9349; dan untuk 𝑓𝑛 sebesar 40,9162. Dari data yang diperoleh tersebut, maka didapatkan hasil dari ζ (zeta) sebesar 0,00060734 dengan hasil damping ratio kurang dari 1 (ζ < 1). Maka dapat dinyatakan dari grafik tersebut adalah Underdamped.
4.2.3 Rubber C
Gambar 4.21 Inputkan Pemrograman Untuk Data Mentah
Gambar 4.22 Hasil Grafik Data Mentah
Gambar 4.23 Inputkan Pemrograman Untuk Hubungan Antara Amplitude dengan Frequency
Gambar 4.24 Grafik Hubungan Antara Amplitude dengan Frequency
Gambar 4.25 Inputkan Pemrograman Untuk Hubungan Antara Power dengan Frequency
Gambar 4.26 Grafik Hubungan Antara Power dengan Frequency Untuk (fn)
Gambar 4.27 Inputkan Pemrograman Untuk Bandwidth (f1 dan f2)
Gambar 4.28 Grafik Bandwidth
Gambar 4.29 Plotting untuk f1 pada Bandwidth
Gambar 4.30 Plotting untuk f2 pada Bandwidth
Pada pengolahan data Rubber C seperti gambar di atas pada Software Matlab didapatkan beberapa data seperti : 𝑓1 sebesar 41,3059; 𝑓2 sebesar 41,3355; dan untuk 𝑓𝑛 sebesar 41,3239. Dari data yang diperoleh tersebut, maka didapatkan hasil dari ζ (zeta) sebesar 0,0000045693 dengan hasil damping ratio kurang dari 1 (ζ < 1). Maka dapat dinyatakan dari grafik tersebut adalah Underdamped.
Jadi, dari keseluruhan pengolahan data Rubber A,B, dan C pada Software Matlab didapatkan berbagai variasi data mulai dari 𝑓1, 𝑓2, 𝑓𝑛 dan ζ (zeta). Untuk urutan perbandingan nilai ζ (zeta) dari ketiga rubber dan dinilai dari damping ratio yang paling bagus adalah rubber C dengan nilai ζ (zeta) sebesar 0,0000045693 kemudian rubber A sebesar 0,00034707 dan yang terakhir adalah rubber B 0,00060734. Dari ketiga rubber tersebut, semuanya mempunyai karaktersitik damping ratio kurang dari 1 (ζ < 1) yang artinya sifat rubber tersebut adalah Underdamped.
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan analisis data hasil praktikum, dapat disimpulkan sebagai berikut : 1. Perbandingan redaman pada fan axial dari ketiga jenis rubber yang berbeda
menunjukkan perbedaan dalam nilai damping ratio. Hasil pengolahan data menunjukkan bahwa rubber A memiliki nilai ζ (zeta) sebesar 0.00034707, rubber B memiliki nilai ζ (zeta) sebesar 0.00060734, dan rubber C memiliki nilai ζ (zeta) sebesar 0.0000045693. Dari hasil tersebut, dapat disimpulkan bahwa rubber C merupakan peredam getaran yang optimal karena memiliki nilai damping ratio yang mendekati atau kurang dari 1 (ζ < 1).
2. Metode evaluasi redaman menggunakan metode half-band power terbukti efektif dalam menganalisis getaran acak melalui kurva respons frekuensi.
Metode ini juga cocok digunakan untuk mengasumsikan rasio redaman yang kecil, sehingga dapat memberikan pemahaman yang baik terhadap karakteristik redaman pada material tertentu.
3. Penentuan rasio redaman dipengaruhi oleh beberapa faktor, yaitu alat ukur, ketelitian pengamat, dan kondisi pengujian saat pengambilan data. Faktor- faktor ini perlu diperhatikan agar hasil pengukuran dapat akurat dan dapat diandalkan.
5.2 Saran
Berikut adalah beberapa saran yang sebaiknya dijalankan pada praktikum getaran mekanik berikutnya:
1. Penting bagi praktikan untuk meningkatkan pemahaman mereka tentang getaran dan redaman sebelum menjalani praktikum, sehingga mereka dapat melaksanakan kegiatan praktikum dengan lebih baik.
2. Perlu diperhatikan dan ditingkatkan jumlah alat praktikum agar waktu yang digunakan menjadi lebih efisien.
3. Diinginkan agar praktikan dapat mengaplikasikan pengetahuan yang diperoleh dari praktikum ini ke dalam kehidupan nyata.
DAFTAR PUSTAKA
Ge, C. & Rice, B., 2018. Impact damping ratio of a nonlinear viscoelastic foam.
Polymer Testing, Volume 72, pp. 187-195.
Genta, G. & Amati, N., 2010. Hysteretic damping in rotordynamics: An equivalent formulation. Journal of Sound and Vibration, Volume 329, p. 4772–4784.
Kunlestiowati, H., Nani , Y. & Sardjito, 2010. Getaran sistem pegas berbeban dengan massa yang berubah terhadap waktu. Prosiding Industrial Research Workshop and National Seminar, Volume 1, pp. 31.1-31.6.
Lee, C.-L., 2020. Proportional viscous damping model for matching damping ratios.
Engineering Structures , Volume 207.
Majanasastra, R. B. S., 2014. ANALISIS SHOCK ABSORBER RODA DEPAN KENDARAAN RODA EMPAT JENIS SUZUKI CARRY 1000. Jurnal Imiah Teknik Mesin, 2(1), pp. 1-16.
Manubulu, C. C., Hendrikus, R. & Ndouk, F., 2020. GETARAN BEBAS PADA STRUKTUR MDOFBANGUNAN PENAHAN GESER. ETERNITAS, 1(1).
Marino, L. & Cicirello , A., 2020. Experimental investigation of a single-degree-of- freedom system with Coulomb friction. Nonlinear Dynamics, Volume 99, p.
1781–1799.
Naval, S., Beigh, N. T., Jain, A. & Mallick, D., 2022. Bandwidth tunable vibration energy harvester based on hybrid triboelectric-piezoelectric array. Engineering Research Express, Volume 4.
Pogorelov, A., Meinke, M. & Schröder, W., 2016. Effects of tip-gap width on the flow field in an axial fan. International Journal of Heat and Fluid Flow, Volume 61, pp. 466-481.
Rao, S. S., 2011. Mechanical Vibrations. 5 penyunt. Miami: Prentice Hall, 1 Lake Street, Upper Saddle.
Risnadiputra, M. Y. & Munasir, 2022. STUDI STRUKTUR, DAN DESAIN DEVAIS PADA SISTEM KOMUNIKASI BAWAH AIR. Jurnal Inovasi Fisika Indonesia (IFI), 12(1), pp. 50-62.
Soeharsono, et al., 2011. MENURUNKAN DRAFTTANAH DAN ENERGI PADA
OPERASI MEMBAJAK TANAH DENGAN GETARAN PAKSA
BERENERGI RENDAH PADA PEGAS ELASTIS. Journal of Agricultural Engineering, 9(1), pp. 31-42.
Widyanto, S. A. et al., 2016. KARAKTERISTIK PEREDAMAN GETARAN KONSTRUKSI MODEL JEMBATAN UNTUK PENGEMBANGAN SISTEM DIGANOSIS POLA GAGAL. TEKNOIN, 22(10), pp. 776-785.
Windyandari, A. & Zakki, F. A., 2014. RANCANG BANGUN MODULAR FLOATING PONTOON FERROCEMENT SEBAGAI ALAT APUNG MULTIGUNA. ROTASI, 16(4), pp. 1-8.
Yadav, J. & Tiwari, S., 2017. Effect of waste rubber fibres on the geotechnical properties of clay stabilized with cement. Applied Clay Science, Volume 149, pp. 97-110.
Zhang, H. et al., 2021. Tracking the natural evolution of bearing spall size using cyclic natural frequency perturbations in vibration signals. Mechanical Systems and Signal Processing, Volume 151.
Zhang, . J. & Ma, Z., 2013. Adaptive Half-Band Power Filtering for Vibration Analysis of Machines Operating Under Non-Stationary Conditions. Journal of Test and Measurement Technology, 27(6), pp. 575-578.
LAMPIRAN
Lampiran 1. Rubber A
Lampiran 2. Rubber B
Lampiran 3. Rubber C
Lampiran 4. Axial Fan
Lampiran 5. Settingan Aplikasi Phyphox
Lampiran 6. Susunan Alat Praktikum
Lampiran 7. Pengambilan Data Rubber A
Lampiran 8. Pengambilan Data Rubber B
Lampiran 9. Pengambilan Data Rubber C
Lampiran 10. Pengolahan Data Rubber A
Lampiran 11. Pengolahan Data Rubber B
Lampiran 12. Pengolahan Data Rubber C