4 2.1 Penelitian Terdahulu
Pada sebuah penelitian yang harus dilakukan adalah mempunyai acuan dan bahan perbandingan dengan penelitian terdahulu. Penelitian ini merupakan hasil dari membandingkan beberapa penelitian lainnya mengenai robot yang menggunakan sensor inframerah dan sensor warna. Adapun penelitian terdahulu yang menjadi acuan tersebut terdapat dari beberapa jurnal terkait penelitian yang dilakukan oleh penulis:
1. Alexander C K, Yonada Rizky, Willy, dan Eka Puji Widiyanto pada tahun 2015 yang berjudul “Rancang Bangun Robot Pengambil Bola Tenis Lapangan Berdasarkan Warna Berbasis Raspberry PI”.
Pada penelitian ini robot dibuat sebagai pembelajaran dibidang robotika. Robot ini mampu mencari bola tenis sesuai dengan arah yang diharapkan. Robot pengambil bola ini dirancang menggunakan sensor ultrasonik, Sedangkan untuk kontrolernya digunakan Raspberry PI sebagai otak pemrosesan data dan motor servo untuk keseimbangan robot saat pengambilan bola tenis lapangan, robot berjalan Untuk mencari posisi letak bola dibutuhkan pergerakan kedua penjepit yang digerakkan oleh motor servo serta pengambilan objek gambar menggunakan webcam sehingga posisi gambar bisa terdeteksi.
Berdasarkan penjelasan tersebut, dapat disimpulkan bahwa :
1. Pada uji coba tegangan baterai didapat bahwa setiap 10 menit melakukan uji coba robot menghabiskan 1,5 volt daya pada baterai.
2. Pada uji coba respon motor servo didapat bahwa servo dapat merespon dengan baik sesuai nilai yang telah ditentukan, nilai tersebut didapat berdasarkan stuktural robot.
3. Pada uji coba intensitas cahaya didapat bahwa semakin terang maka nilai RGB yang didapat semakin besar dan semakin gelap maka nilai RGB yang didapat semakin kecil.
4. Pada uji coba nilai sensor ultrasonic masih mendekati jarak yang telah ditentukan sehingga didapat bahwa sensor ultrasonic dapat bekerja dengan baik untuk mendeteksi bola tenis.
2. Yopi Mandari, Triyanto Pangaribowo pada tahun 2016 yang berjudul
“Rancang Bangun Sistem Robot Penyortir Benda Padat Berdasarkan Warna Berbasis Arduino”.
Pada penelitian ini, robot yang digunakan adalah robot penyortir benda berdasarkan warna dengan menggunakan sistem kontrol arduino uno, sensor warna TCS 3200 dan servo. Pertama-tama program yang penulis buat dimasukkan ke dalam arduino uno yang telah terhubung dengan perangkat lainnya. Setelah itu secara otomatis robot tersebut dapat membaca warna benda sesuai dengan masukan data dari sensor warna TCS 3200 dan secara otomatis servo menyortir benda sesuai warna yang telah dibaca oleh sensor warna TCS 3200 dan sesuai dengan program yang telah di input kedalam arduino uno tersebut.
Berdasarkan penjelasan tersebut, dapat disimpulkan bahwa:
1. Sensor warna TCS3200 cocok digunakan sebagai sensor deteksi obyek yang berwarna hal ini ditunjukan pada hasil pengujian ketika mendeteksi warna merah,hijau dan biru memberikan reaksi pada motor servo bergerak menutup 45°.
2. Pada sistem penyortir benda berdasarkan warna pada penelitian ini memberikan kemudahan dalam menyortir benda dan menampilkan jumlah warna benda sehingga dapat meminimalkan human error.
3. Mariatul Kiftiyah, Santoso, dan Munsyi pada tahun 2015 yang berjudul “Robot Pendeteksi Warna”.
Robot pendeteksi warna menggunakan sensor TCS3200 berbasis mikrokontroler Atmega8535. Sensor warna berguna untuk mendapatkan data warna. Sistem terdiri atas perangkat keras dan perangkat lunak.
Pengaktifan sensor perlu dilakukan guna pengambilan data setiap objek warna yang didekatkan. Hasil pengujian belum dapat menghasilkan data
warna yang diinginkan, data sensor untuk warna merah sebesar 2Volt, warna hijau sebesar 2Volt, dan warna biru sebesar 2Volt. Dengan hasil sensor yang yang belum menunjukkan perubahan pada setiap pergantian warna, maka hasil data warna tidak dapat diproses dalam mikrokontroller.
Dibutuhkan riset kembali dengan lebih memperhatikan karakteristik dari sensor yang digunakan.
Berdasarkan penjelasan tersebut, dapat disimpulkan bahwa:
1. Sensor dapat menyala waktu diberi tegangan saat pengukuran Sensor terhadap warna.
2. Hasil sensor masih belum menunjukkan perubahan yang signifikan.
3. Masih terkendala dalam menterjemahkan hasil sensor kedalam mikrokontroller.
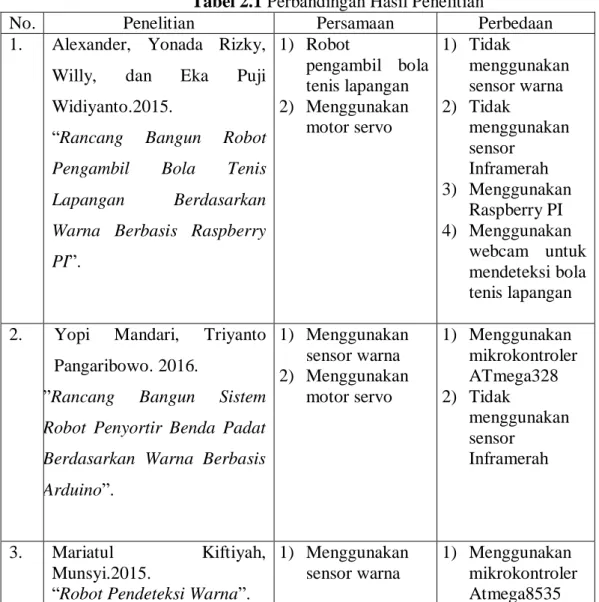
Tabel 2.1 Perbandingan Hasil Penelitian
No. Penelitian Persamaan Perbedaan
1. Alexander, Yonada Rizky, Willy, dan Eka Puji Widiyanto.2015.
“Rancang Bangun Robot Pengambil Bola Tenis Lapangan Berdasarkan Warna Berbasis Raspberry PI”.
1) Robot
pengambil bola tenis lapangan 2) Menggunakan
motor servo
1) Tidak
menggunakan sensor warna 2) Tidak
menggunakan sensor
Inframerah 3) Menggunakan
Raspberry PI 4) Menggunakan
webcam untuk mendeteksi bola tenis lapangan 2. Yopi Mandari, Triyanto
Pangaribowo. 2016.
”Rancang Bangun Sistem Robot Penyortir Benda Padat Berdasarkan Warna Berbasis Arduino”.
1) Menggunakan sensor warna 2) Menggunakan
motor servo
1) Menggunakan mikrokontroler ATmega328 2) Tidak
menggunakan sensor
Inframerah
3. Mariatul Kiftiyah, Munsyi.2015.
“Robot Pendeteksi Warna”.
1) Menggunakan sensor warna
1) Menggunakan mikrokontroler Atmega8535
2) Tidak
menggunakan sensor
Inframerah
2.2 Olahraga Tenis Lapangan
Menurut (Pristiangga, 2019) tenis lapangan merupakan sebuah permainan atau olahraga dengan menggunakan raket sebagai alat pemukul bola yang melewati net dan memantulkan bola sehingga lawan tidak dapat mengembalikan bola tersebut, olahraga ini dapat dimaninkan secara individu atau ganda. Salah satu olahraga yang sangat diakui oleh dunia adalah tenis lapangan. Adapun lapangannya dapat berubah sesuai dengan jumlah pemainnya.
Sekilas lapangan tenis lapangan memang mirip dengan lapangan bulu tangkis, memiliki bentuk persegi panjang dan terdapat net di tengah-tengah lapangan yang membagi lapangan menjadi dua bagian. Meski hampir sama namun tinggi net yang ada pada lapangan tenis lebih rendah dibandingkan dengan bulu tangkis, karena cara memainkan tenis yaitu dengan memantulkan bola tenis ke permukaan lapangan menggunakan raket. perbedaan mendasar lainnya yaitu lapangan tenis memiliki ukuran lapangan yang lebih besar dibandingkan dengan ukuran lapangan bulu tangkis, untuk lebih jelasnya berikut ukuran lapangan tenis sesuai dengan standar :
- Panjang lapangan : 23,77 meter - Lebar lapangan (tunggal) : 8,23 meter - Lebar lapangan (ganda) : 10,97 meter
- Jarak garis dalam (tunggal) dengan garis luar (ganda) : 1,37 meter
Gambar 2.1 Lapangan tenis lapangan
Tenis lapangan memiliki beberapa macam jenis lapangan yaitu:
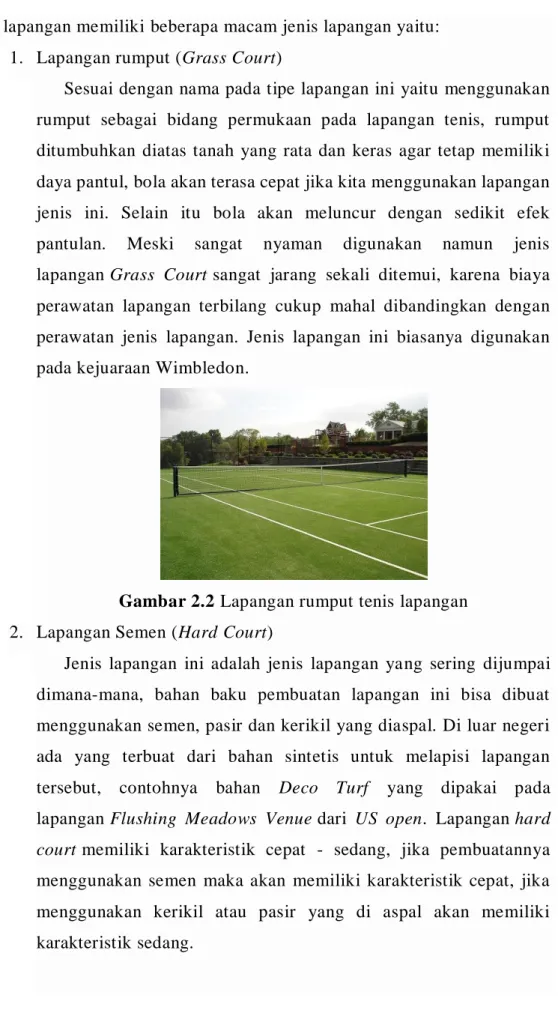
1. Lapangan rumput (Grass Court)
Sesuai dengan nama pada tipe lapangan ini yaitu menggunakan rumput sebagai bidang permukaan pada lapangan tenis, rumput ditumbuhkan diatas tanah yang rata dan keras agar tetap memiliki daya pantul, bola akan terasa cepat jika kita menggunakan lapangan jenis ini. Selain itu bola akan meluncur dengan sedikit efek pantulan. Meski sangat nyaman digunakan namun jenis lapangan Grass Court sangat jarang sekali ditemui, karena biaya perawatan lapangan terbilang cukup mahal dibandingkan dengan perawatan jenis lapangan. Jenis lapangan ini biasanya digunakan pada kejuaraan Wimbledon.
Gambar 2.2 Lapangan rumput tenis lapangan 2. Lapangan Semen (Hard Court)
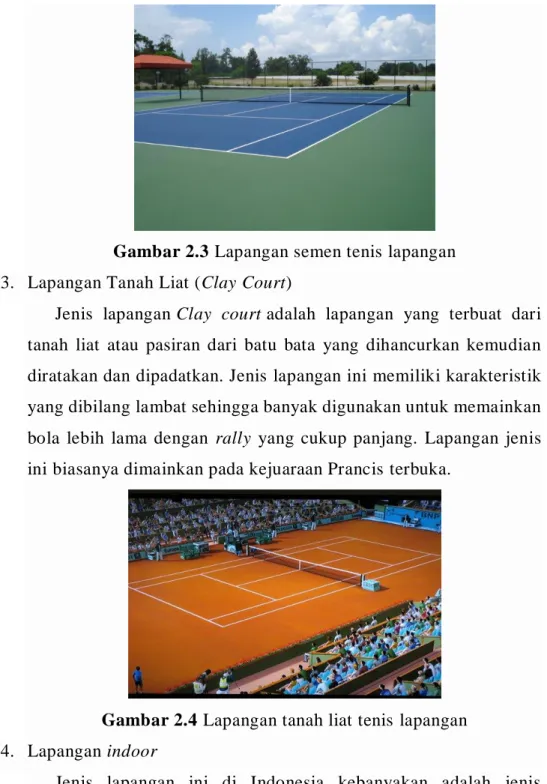
Jenis lapangan ini adalah jenis lapangan yang sering dijumpai dimana-mana, bahan baku pembuatan lapangan ini bisa dibuat menggunakan semen, pasir dan kerikil yang diaspal. Di luar negeri ada yang terbuat dari bahan sintetis untuk melapisi lapangan tersebut, contohnya bahan Deco Turf yang dipakai pada lapangan Flushing Meadows Venue dari US open. Lapangan hard court memiliki karakteristik cepat - sedang, jika pembuatannya menggunakan semen maka akan memiliki karakteristik cepat, jika menggunakan kerikil atau pasir yang di aspal akan memiliki karakteristik sedang.
Gambar 2.3 Lapangan semen tenis lapangan 3. Lapangan Tanah Liat (Clay Court)
Jenis lapangan Clay court adalah lapangan yang terbuat dari tanah liat atau pasiran dari batu bata yang dihancurkan kemudian diratakan dan dipadatkan. Jenis lapangan ini memiliki karakteristik yang dibilang lambat sehingga banyak digunakan untuk memainkan bola lebih lama dengan rally yang cukup panjang. Lapangan jenis ini biasanya dimainkan pada kejuaraan Prancis terbuka.
Gambar 2.4 Lapangan tanah liat tenis lapangan 4. Lapangan indoor
Jenis lapangan ini di Indonesia kebanyakan adalah jenis permukaan hard court atau lapangan semen namun ada juga jenis lapangan Indoor clay yaitu berada di UMS 80, Kuningan, Jakarta.
Di luar negeri seperti di Amerika dan Eropa lapangan indoor dilapisi menggunakan karpet sintetis, menurut ITF lapangan karpet tersebut sama seperti yang digunakan pada lapangan Tennis Master, namun beberapa ada juga yang menggunakan rumput sintetis.
Gambar 2.5 Lapangan indoor tenis lapangan 2.3 Perlengkapan Tenis Lapangan
2.3.1 Net dan Tiang Tenis Lapangan
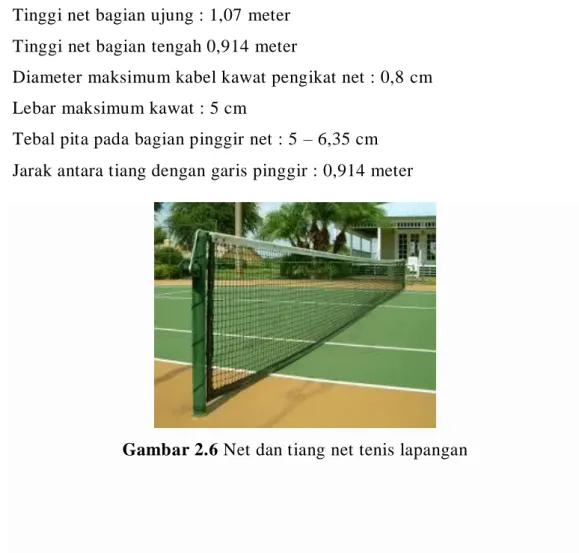
Selain mengetahui ukuran lapangan tenis, tidak kalah penting juga mengetahui ukuran net dan tiang tenis, sama halnya dengan ukuran lapangan yang telah dijelaskan di atas, menurut (Pristiangga, 2019) ukuran net dan tiang tenis pun memiliki standar nasional maupun internasional yang telah ditetapkan, untuk lebih jelasnya berikut ukuran net dan tiang tenis.
- Tinggi tiang tenis : 1,07 meter - Tinggi net bagian ujung : 1,07 meter - Tinggi net bagian tengah 0,914 meter
- Diameter maksimum kabel kawat pengikat net : 0,8 cm - Lebar maksimum kawat : 5 cm
- Tebal pita pada bagian pinggir net : 5 – 6,35 cm - Jarak antara tiang dengan garis pinggir : 0,914 meter
Gambar 2.6 Net dan tiang net tenis lapangan
2.3.2 Bola Tenis Lapangan
Dalam permainan tenis, bola tenis juga memiliki ukuran yang sudah ditetapkan oleh ITF (International Tennis Federation) yang merupakan induk organisasi permainan tenis internasional. Menurut (Pristiangga, 2019) Sebenarnya ukuran bola tenis disetiap ketinggian tempat memiliki ukuran yang berbeda-beda, mulai dari diameter bola hingga berat bola yang telah ditentukan, meski begitu ITF memberikan standar ukuran bola yang umum digunakan untuk pertandingan sekala nasional maupun internasional, berikut ukuran bola tenis :
1. Diameter bola : 65,41 - 68,58 mm.
2. Berat bola : 56,0 - 59,4 gram.
Gambar 2.7 Bola tenis lapangan 2.4 Robot
2.4.1 Pengertian Robot
Definisi robot menurut Robot Institute Of America (1979) yaitu sebuah robot adalah sesuatu yang dapat di program dan diprogram ulang, dengan memiliki manipulator mekanik atau penggerak yang didesain untuk memindahkan barangbarang, komponen-komponen atau alat-alat khusus dengan berbagai program yang fleksibel disesuaikan untuk melaksanakan berbagai macam tugas.
Ada banyak definisi yang dikemukakan oleh para ahli mengenai robot.
Menurut (Prastyawan Devid, 2017) orang awam beranggapan bahwa robot mengandung pengertian suatu alat yang menyerupai manusia, namun struktur tubuhnya tidak menyerupai manusia melainkan terbuat dari logam. Beberapa ahli robotika berupaya memberikan beberapa definisi, antara lain :
1. RIA (Robotik Insitute Of Robot), “Robot adalah sebuah manipulator yang dapat di program ulang untuk memindahkan tool, material, atau peralatan tertentu
dengan berbagai program pergerakan untuk berbagai tugas dan juga mengendalikan serta mensinkronkan peralatan dengan pekerjaannya”.
2. ORJ (Official Japanese), “Robot adalah sebuah sistem mekanik yang mempunyai fungsi gerak analog untuk fungsi gerak organisme hidup, atau kombinasi dari banyak fungsi gerak dengan fungsi intelligent.
Menurut (Mandari Yopi, 2016) pengertian robot merupakan suatu alat mekanik yang dapat melakukan tugas menggantikan manusia, baik menggunakan pengawasan dan control manusia, atau menggunakan program yang telah didefinisikan (kecerdasan buatan). Robot biasanya digunakan untuk menggantikan manusia melakukan tugas berat, berbahaya, pekerjaan berulang, dan kotor.
Biasanya robot industri digunakan dalam garis produksi (pekerjaan berulang).
Penggunaan lainnya adalah untuk membantu manusia dalam memindahkan suatu benda tanpa harus mengangkat benda tersebut. Robot ini juga sering diaplikasikan pada industri pabrik dan dapat membantu manusia serta menghemat waktu dalam pekerjaan.
2.4.2 Sejarah Robot
Pertama kali kata “ROBOT” digunakan di New York pada Oktober 1922 pada sebuah pentas theater yang berjudul “RVR”, dinaskahi oleh Karel Caper. Kata Robot itu sendiri berasal dari sebuah kata robota yang berarti kerja (Pranoto Sri, 2017).
Istilah robot berasal dari bahasa Cekoslowakia. Kata robot berasal dari kosakata “Robota” yang berarti “kerja cepat”. Istilah ini muncul pada tahun 1920 oleh seorang pengarang sandiwara bernama Karel Capec. Karyanya pada saat itu berjudul “Rossum’s Universal Robot” yang artinya Robot Dunia milik Rossum.
Rossum merancang dan membangun suatu bala tentara yang terdiri 11 dari robot industri yang akhirnya menjadi terlalu cerdik dan akhirnya menguasai manusia.
Kata Robotics juga berasal dari novel fiksi sains “runaround” yang ditulis oleh Isaac Asimov pada tahun 1942. Sedangkan pengertian robot secara tepat adalah sistem atau alat yang dapat berperilaku atau meniru perilaku manusia dengan tujuan untuk menggantikan dan mempermudah kerja/aktifitas manusia. Untuk dapat diklasifikasikan sebagai robot, mesin harus memiliki dua macam kemampuan yaitu bisa mendapatkan informasi dari sekelilingnya dan dapat melakukan sesuatu
secara fisik seperti bergerak atau memanipulasi objek. Untuk dapat dikatakan sebagai robot sebuah sistem tidak perlu untuk meniru semua tingkah laku manusia, namun suatu sistem tersebut dapat mengadopsi satu atau dua saja sistem yang ada pada diri manusia saja sudah dapat dikatakan sebagai robot. Sistem yang diadopsi berupa sistem penglihatan (mata), sistem pendengaran (telinga) ataupun sistem gerak (Ananta Syahreza, 2017).
2.5 Lego Mindstorms EV3
Lego Mindstorms EV3 adalah robot generasi ketiga dari LEGO. Penamaan dari “EV3” ini sendiri menunjukkan bahwa robot ini merupakan evolusi generasi ketiga dari produk Mindstrorms. Dimana generasi pertama nya yaitu RCX dan generasi keduanya NTX.
Salah satu perubahan dari robot NXT ke EV3 yaitu perbaikan pada teknologi brick. EV3 ini menggunakan prosesor yang lebih kuat yaitu ARM9 sedangkan NXT masih menggunakan prosesor ARM7. EV3 memiliki sebuah konektor USB dan terdapat slot micro SD untuk memuat file dan menyimpan data sedangkan yang sebelumnya NXT hanya memiliki sebuah konektor USB saja, tak hanya itu EV3 juga dapat mengontrol brick menggunakan perangkat iOS dan Android sedangkan NXT hanya bisa mengontrol brick menggunakan Android saja.
Pada EV3 ini sendiri sudah dilengkapi dengan pemrograman perangkat lunak atau opsional lab view untuk Lego Mindstroms. Robot jenis lego ini dapat dibangun sesuai keinginan user dan dapat dirakit dengan berbagai bentuk sesuai kebutuhan (Nugraha Muhammad Febryano, 2017).
Gambar 2.8 Lego Mindstorms EV3
2.6 Komponen - Komponen Lego Mindstorms EV3 2.6.1 EV3 Brick
Brick adalah komponen utama yang berfungsi sebagai otak dari robot EV3.
Brick ini akan mengumpulkan informasi yang berasal dari sensor, memprosesnya dan mengirimkan perintah tersebut ke aktuator (penghasil gerakan). Komponen ini dapat dihubungkan dengan komputer dan smartphone karena adanya konektivitas USB, Bluetooth dan Wifi. Program yang telah dibuat dapat akan di upload ke EV3 Brick untuk di compile. EV3 Brick berfungsi untuk mengendalikan jalannya robot sesuai dengan program yang kita buat. Pada pembuatan program kita dapat melakukan dengan 2 cara yaitu dengan membuat program secara langsung pada EV3 Brick atau membuat program melalui komputer yang selanjutnya akan di- upload ke EV3 Brick.
Gambar 2.9 EV3 Brick
Adapun spesifikasi dari EV3 Brick menurut (Education LEGO, 2016) adalah sebagai berikut:
1. ARM main microprocessor @300 MHz dengan16 MB flash memory, 64 MB RAM ditambah slot ekspansi microSD hingga 32 GB
2. LCD display 172 x 128 pixel dengan layer tampilan matriks 3. Tersedia Bluetooth V2.1
4. Satu port USB 2.0 interface memungkinkan untuk konektivitas WiFi 5. Empat port input: port 1, port 2, port 3, dan port 4 yang menghubungkan
hingga 4 sensor pada saat yang sama termasuk sensor NXT
6. Empat port output : port A, port B, port C, dan port D yang menghubungkan hingga 4 motor
7. Speaker terintegrasi untuk mengeluarkan output suara
8. Tiga tombol : kembali, pusat, navigasi (kiri, kanan, atas , bawah) 9. Kompatibel untuk iOS dan Android
(www.generationrobots.com ).
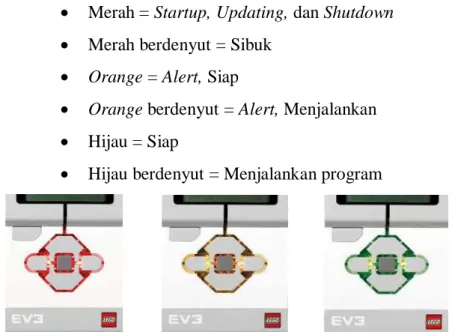
Status lampu yang terdapat pada Brick Buttons akan memberikan informasi status terkini keadaan brick. Lampu yang mengelilingi buttons brick ini berwarna hijau, orange, dan merah dan bisa berdenyut serta memiliki kode status yang berbeda, yaitu:
Merah = Startup, Updating, dan Shutdown
Merah berdenyut = Sibuk
Orange = Alert, Siap
Orange berdenyut = Alert, Menjalankan
Hijau = Siap
Hijau berdenyut = Menjalankan program
Gambar 2.10 Status lampu pada EV3 Brick Buttons 2.6.1.1 Sisi Bagian Bawah EV3 Brick
Pada bagian bawah EV3 Brick tersebut terdapat port 1, port 2, port 3 dan port 4 sebagai port input yang digunakan untuk menghubungkan sensor dengan EV3 Brick. Menurut (Education LEGO, 2016) Adapun fungsi di masing- masing port yaitu :
Port 1 : No sensor
Port 2 : No sensor
Port 3 : colour sensor
Port 4: Infrared sensor
Gambar 2.11 Sisi bagian bawah EV3 Brick 2.6.1.2 Sisi Bagian Atas EV3 Brick
Pada sisi bagian atas EV3 Brick ini terdapat port A, port B, port C dan port D yang berfungsi sebagai port output yang menghubungkan motor ke EV3 Brick. Sebuah port PC berbentuk mini USB gunanya untuk menghubungkan komputer ke EV3 brick yang dilakukan dengan cara mengunduh program ke EV3 Brick controller (Education LEGO, 2016).
Gambar 2.12 Sisi bagian atas EV3 Brick 2.6.1.3 Sisi Bagian Kanan EV3 Brick
Pada bagian sisi kanan EV3 Brick tersebut terdapat speaker yang berfungsi untuk mengeluarkan suara digunakan dalam mendesain robot. Suara tersebut didapat dari program software EV3 (Education LEGO, 2016).
Gambar 2.13 Sisi bagian kanan pada EV3 Brick 2.6.1.4 Sisi Bagian Kiri EV3 Brick
Pada bagian sisi kiri EV3 Brick tersebut terdapat port host USB yang digunakan untuk menambahkan dongle USB Wi-Fi untuk menghubungkan ke jaringan nirkabel dan bisa juga untuk menghubungkan hingga empat EV3 Brick bersama. Sedangkan untuk port kartu SD untuk meningkatkan memori yang telah tersedia pada EV3 Brick dengan kartu SD maksimum 32GB (Education LEGO, 2016).
Gambar 2.14 Sisi bagian kiri pada EV3 Brick 2.6.2 EV3 Motors
Pada Lego Mindstorms EV3 terdapat dua jenis motor yaitu motor large dan motor medium yang keduanya berfungsi untuk menggerakkan bagian robot seperti memutar roda atau bahkan menjadi sendi. Motor yang digunakan pada Lego Mindstorms EV3 ialah motor DC servo yang dilengkapi oleh encorder yang gunanya berfungsi untuk umpan balik sehingga pusat pengendalian dapat memberikan arus yang sesuai dengan beban pada motor. Satu Brick dapat dipasang hingga empat buah motor. Sedangkan pada motor DC biasa memiliki keterbatasan kemampuan torsi putar karena motor DC biasa tidak mempunya umpan balik untuk mengadaptasi beban motor DC.
Servo biasanya dapat digunakan untuk menghitung derajat perputaran atau rotasi. Kecepatan sudut maksimum motor adalah satu putaran perdetik. Akurasi dari servo motor mencapai kurang lebih satu derajat, torsi yang besar didapat dalam waktu singkat merupakan kelebihan motor servo. Adapun kekurangannya yaitu kurangnya akurasi sehingga diperlukan suatu pengendali yang dapat meningkatkan keakurasian (Sunarsih Ika, 2017).
2.6.2.1 Motor Large
Motor Large merupakan motor kuat dan smart yang memiliki built-in rotasi sensor dengan resolusi satu derajat untuk kontrol yang tepat. Motor Large dioptimalkan untuk menjadi basis mengemudi pada robot. Dengan menggunakan Move Steering atau Move tank programming block di software pemrograman Lego Mindstorms Education EV3, sedangkan motor large akan mengkoordinasikan tindakan secara bersamaan (Education LEGO, 2016).
Gambar 2.15 Motor Large 2.6.2.2 Motor Medium
Motor medium juga menyertakan sensor rotasi bawaan dengan resolusi satu derajat, tetapi lebih kecil dan lebih ringan daripada motor large. Itu berarti bahwa motor medium mampu merespon lebih cepat daripada motor large. Medium Motor dapat diprogram untuk menghidupkan dan mematikan, mengontrol level daya, atau menjalankan untuk waktu atau rotasi tertentu. Adapun perbandingan dari kedua motor diatas menurut (Education LEGO, 2016) yaitu:
1. Motor large berjalan lebih lambat tetapi lebih kuat pada 160-170 rpm, dengan torsi berjalan 20 Ncm dan torsi kios 40 Ncm
2. Motor medium berjalan lebih cepat, tetapi kurang bertenaga pada 240–
250 rpm, dengan torsi berjalan 8 Ncm dan torsi kios 12 Ncm
Gambar 2.16 Motor medium
2.6.3 EV3 Sensors
2.6.3.1 Sensor Inframerah dan Remot Infrared Beacon
Sensor digital yang dapat mendeteksi cahaya inframerah kemudian dipantulkan dari benda padat merupakan cara kerja sensor inframerah. Hal ini juga dapat mendeteksi sinyal cahaya inframerah yang dikirim dari remote Infrared Beacon. Sensor ini dapat digunakan dalam tiga mode yang berbeda yaitu Proximity Mode (mode kedekatan), Beacon Mode (mode Beacon) dan Remote Mode (mode jarak jauh) (Education LEGO, 2016).
Gambar 2.17 Sensor Inframerah 1. Proximity Mode
Proximity Mode atau mode kedekatan yaitu sensor inframerah menggunakan gelombang cahaya yang dipantulkan kembali dari objek untuk memperkirakan jarak antara sensor dan objek tersebut. Laporan jarak menggunakan nilai antara 0 (sangat dekat) hingga nilai 100 (jauh), bukan sebagai jumlah tertentu cm (centimeters) atau inci. Sensor dapat mendeteksi objek hingga 70 cm, tergantung pada ukuran dan bentuk objek (Education LEGO, 2016).
Gambar 2.18 Proximity Mode 2. Beacon Mode
Beacon Mode (Mode Beacon) yaitu memilih salah satu dari empat saluran remote Infrared Beacon dari Channel Selector merah. Sensor inframerah akan mendeteksi sinyal beacon yang cocok dengan saluran yang telah ditentukan di dalam program hingga jarak sekitar 200 cm ke arah objek. Setelah terdeteksi, sensor dapat memperkirakan arah umum (heading) dari jarak (proximity) ke Beacon.
Terdapat nilai antara -25 dan 25, dengan 0 menunjukkan bahwa Beacon secara langsung berada di depan sensor inframerah. Kedekatan akan nilai antara 0 dan 100 (Education LEGO, 2016).
Gambar 2.19 Beacon Mode (Education LEGO, 2016)
Remot Infrared Beacon adalah perangkat terpisah yang dapat genggam atau dibangun menjadi model LEGO lain. Remot Infrared Beacon hanya memerlukan dua buah baterai AAA. Untuk mengaktifkan remot ini, tekan tombol beacon mode besar pada bagian atas perangkat. Apabila indikator LED hijau menyala maka itu menunjukkan bahwa perangkat tersebut telah aktif dan transmisi terus menerus.
Kemudian untuk mematikannya tekan kembali pada tombol beacon mode. Apabila Remot Infrared Beacon setelah satu jam tidak aktif, maka akan secara otomatis mati dengan sendirinya (Education LEGO, 2016).
3. Remote Mode
Remote Mode atau mode jarak jauh juga dapat menggunakan remot Infrared Beacon sebagai remot kontrol robot. Ketika berada dalam mode jarak jauh, sensor inframerah dapat mendeteksi kombinasi tombol pada Beacon yang ditekan.
Gambar 2.20 Remot Infrared Beacon Gambar 2.21 Remote mode Yang mana ada sebelas macam kombinasi tombol pada remot Infrared Beacon, kode tombol tersebut menurut (Education LEGO, 2016) dapat dilihat pada Gambar 2.21 yang artinya yaitu:
0 = Mode off 1 = Tombol 1 2 = Tombol 2 3 = Tombol 3 4 = Tombol 4
5 = Tombol 1 dan tombol 3 6 = Tombol 1 dan tombol 4 7 = Tombol 2 dan tombol 3 8 = Tombol 2 dan tombol 4 9 = Beacon mode on
10 = Tombol 1 dan tombol 2 11 = Tombol 3 dan tombol 4 2.6.3.2 Sensor Warna
Sensor warna (colour sensor) adalah sensor yang dapat mendeteksi warna atau intensitas cahaya yang memiliki sample rate 1kHz. Terdapat tiga mode berbeda dari sensor warna yaitu warna, intensitas cahaya yang dipantulkan, dan intensitas cahaya sekitar. Adapun penjelasannya dari masing-masing mode menurut (Education LEGO, 2016) yaitu:
1. Mode warna
Dalam mode ini, sensor warna dapat membedakan hingga tujuh warna berbeda: hitam, biru, hijau, kuning, merah, putih, dan coklat. Setiap warna juga diwakili oleh nilai. Untuk hasil terbaik, sensor warna harus berjarak 1- 2 cm dari warna yang ingin dideteksi dan memiliki pencahayaan yang konsisten.
2. Mode intensitas cahaya yang dipantulkan
Cahaya merah akan dipancarkan oleh sensor warna dan mengukur jumlah yang dipantulkan kembali ke dirinya sendiri dari permukaan yang diuji.
Intensitas cahaya diukur sebagai persentase dari 0 hingga 100, dengan 0 menjadi sangat gelap dan 100 menjadi sangat terang.
3. Mode intensitas cahaya sekitar
Sensor warna akan mengukur jumlah cahaya di lingkungannya tanpa menghasilkan sumber cahayanya sendiri. Intensitas cahaya sekitar diukur sebagai persentase dari 0 hingga 100, dengan 0 menjadi sangat gelap, dan 100 menjadi sangat cerah.
Gambar 2.22 Sensor Warna Tabel 2.2 Data Warna dan Cahaya
No. Data Type Range Catatan
1 Warna Numeric 0 – 7 Digunakan dalam mode warna 0 = Tidak berwarna
1 = Hitam 2 = Biru 3 = Hijau 4 = Kuning 5 = Merah 6 = Putih 7 = Brown
2 Cahaya Numeric 0 – 100 Digunakan dalam mode intensitas cahaya yang dipantulkan dan mode intensitas cahaya sekitar. Mengukur intensitas cahaya sebagai presentase 0 = paling gelap dan 100 = paling terang.
(Burfoot John, 2018).
2.6.4 Konektor
Untuk menghubungkan sensor dan EV3 brick maka diperlukan sebuah konektor berupa kabel. Port 1, port 2, port 3 dan port 4 pada EV3 brick akan terhubung ke sensor, sedangkan pada port A, port B, port C dan port D akan terhubung ke EV3 motor menggunakan konektor. Adapun kabel penghubung ini terdapat 3 jenis ukuran yaitu kabel berukuran 25 cm, 45 cm dan 50 cm.
Apabila kita akan men-download program yang telah kita buat di aplikasi EV3 software ke brick terdapat dua cara, yang pertama yaitu dengan menggunakan kabel USB untuk menghubungkan port PC pada brick ke komputer dan cara kedua yaitu menghubungkan dengan koneksi Bluetooth.
Pada saat melakukan pemrograman, jika EV3 brick terhubung ke komputer maka aplikasi EV3 Software akan secara otomatis mengidentifikasi port mana yang digunakan untuk setiap sensor dan motor (Education LEGO, 2016).
Gambar 2.23 Connector cable
2.6.5 Komponen Tambahan
Selain adanya komponen utama yang terdapat pada Robot Lego Mindstorms EV3 ada juga komponen tambahan yang jumlahnya sebanyak 585 elemen teknik yang gunanya bermacam-macam sesuai dengan kebutuhan jenis robot.
Gambar 2.24 Komponen tambahan Robot Lego Mindstorms EV3
2.6.6 Aplikasi Pemrograman Lego Mindstorms
Setelah semua komponen telah terpasang pada robot, maka hal yang selanjutnya yaitu memprogram EV3 Brick dengan menggunakan software Lego Mindstorms Education EV3 berbasis GUI (Graphical User Interface) yang sistem operasinya berupa gambar – grafik atau ikon.
Software ini menggunakan Icon-Based sehingga mempermudah untuk memprogram robot yang dirancang. Terdapat banyak cara untuk memprogramnya yaitu menggunakan komputer yang software didapat pada situs web resmi LEGO dan juga bisa menggunakan smartphone (Android/iOS) atau tablet yang bisa di download pada App Store atau Play Store.
Saat kita pertama kali membuka software Lego Mindstorms Education EV3, maka yang pertama kali terbuka adalah tampilan awal (lobby) yang terdapat banyak menu untuk mengakses berbagai macam fungsi dari software ini.
Gambar 2.25 Lobby Lego Mindstorms Education EV3
Pada saat akan memprogram robot maka tentunya harus membuat project baru. Semua program, eksperimen, gambar, suara, video, instruksi, dan aset lainnya yang digunakan dalam suatu project akan secara otomatis disimpan dalam folder project ini.
Gambar 2.26 Tampilan project dan program Selain itu tampilan pada project description yaitu:
Gambar 2.27 Tampilan project description
1. Project Description : berfungsi memberikan judul serta memasukkan setiap gambar dan video yang diinginkan muncul di lobby ketika project akan dilihat terlebih dulu.
2. Project Content Overview : ditampilkannya semua aset termasuk dalam project. Misalnya program, eksperimen, gambar, suara, dan My Bloks.
3. Daisy Chain Mode : memungkinkan untuk memprogram hingga empat Bricks EV3 yang terhubung sekalipun yaitu dengan cara mencentang kotak Daisy Chain Mode.
2.6.6.1 Programming Blocks and Paletts
Semua blok pemrograman yang digunakan untuk mengendalikan robot berada di Programming Palettes pada bagian bawah Programming Canvas. Blok Pemrograman dibagi ke dalam kategori sesuai dengan jenis dan sifat, sehingga mudah untuk menemukan blok yang dibutuhkan. Untuk sekilas video pemrograman, bisa dilihat di bagian Quick Start dari Lobby dan juga dapat menemukan informasi lebih lanjut tentang bagaimana program di teks (Education LEGO, 2016).
Gambar 2.28 Action Block
Pada action block ini terdapat motor medium, motor large, move steering, move tank, tampilan + suara + lampu status brick.
Gambar 2.29 Flow Control
Untuk flow control berisikan block Start, wait, pengulangan, switch, Loop Interrupt. Biasanya blok flow control ini digunakan untuk memprogram robot.
Gambar 2.30 Blok Sensor
Block Sensor berisikan block brick buttons, sensor warna, gyro sensor, sensor inframerah, motor rotation, sensor temperatur, timer, sensor sentuh, sensor ultrasonik, energy meter, Sensor Sound NXT.
Gambar 2.31 Blok data operations
Pada blok data operations terdapat variabel, konstan, operasi larik, operasi logika, matematika, round, compare, range, teks dan acak.
Gambar 2.32 Block advanced
. ,terjaga, nilai sensor Raw, unregulated motor, invert motor dan stop program.
2.6.7 Flowchart
Simbol-simbol pada flowchart yang biasanya dipakai yaitu simbol-simbol flowchart standar yang dikeluarkan oleh ANSI dan ISO. Simbol-simbol tersebut dapat dilihat pada table berikut ini:
Tabel 2.3 Simbol Simbol Flowchart
Simbol Nama Fungsi
Arus / Flow Penghubung antara prosedur / proses
Connector Simbol keluar / masuk prosedur atau proses dalam lembar / halaman yang sama Off-line Connector Simbol keluar / masuk
prosedur atau proses dalam lembar / halaman yang lain Process Simbol pengolahan yang
dilakukan komputer.
Decision Simbol untuk kondisi yang
akan menghasilkan beberapa kemungkinan jawaban / aksi.
Predefined Process Simbol untuk
mempersiapkan penyimpanan yang akan digunakan sebagai tempat pengolahan didalam storage
Terminallllllllllll Simbol untuk permulaan atau akhir dari suatu program
Manual Input Simbol untuk pemasukan data secara manual on-line keyboard
Input-Output Simbol yang menyatakan proses input dan output tanpa tergantung dengan jenis peralatannya
Document Simbol yang menyatakan input berasal dari dokumen dalam bentuk kertas atau output di cetak dikertas Disk and On-line
Storage
Simbol untuk menyatakan input berasal dari disk atau output di simpan ke disk