Sebagai bagian dari penelitian mengenai mobil listrik, penelitian ini berfokus pada sistem kendali mobil listrik. Tujuan dari penelitian ini adalah mengembangkan sistem CAN-Bus untuk mengendalikan berbagai perangkat elektronik pada mobil listrik sehingga dihasilkan mobil listrik yang memiliki ciri khas kendaraan listrik di Indonesia. Target keluaran dari penelitian ini adalah sebuah prototype sistem kendali CAN-Bus yang dapat diterapkan pada mobil listrik.
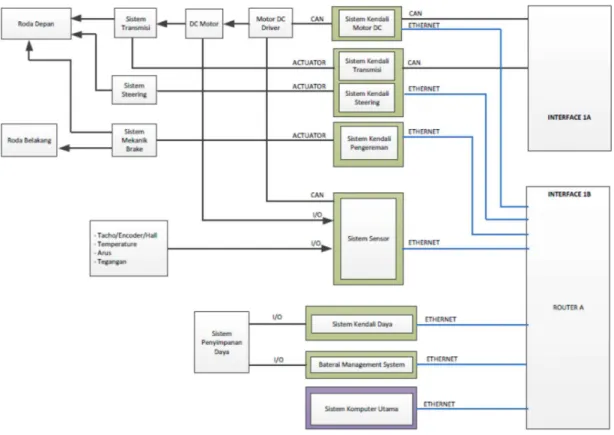
Kegiatan penelitian tersebut sebagian besar dilakukan di laboratorium penelitian mobil listrik yang terletak di kampus ITENAS. Sistem motor dan penggerak daya - Sistem penyimpanan energi - Sistem kendali mobil listrik - Infrastruktur pengisian daya - Sistem pendukung mobil listrik. Komputer perekam utama berguna sebagai alat untuk mencatat segala informasi yang terjadi pada mobil listrik.
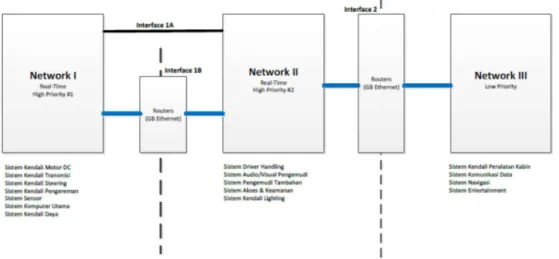
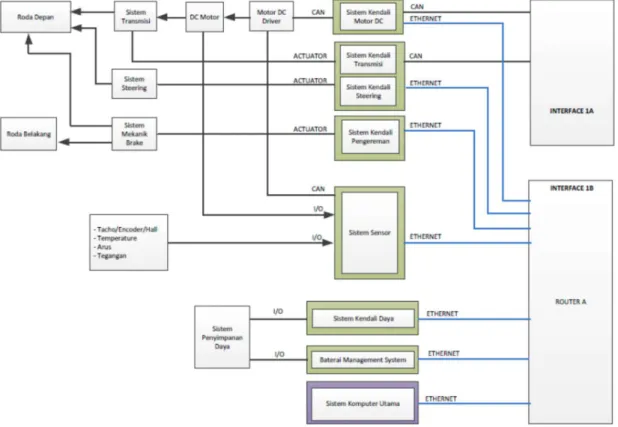
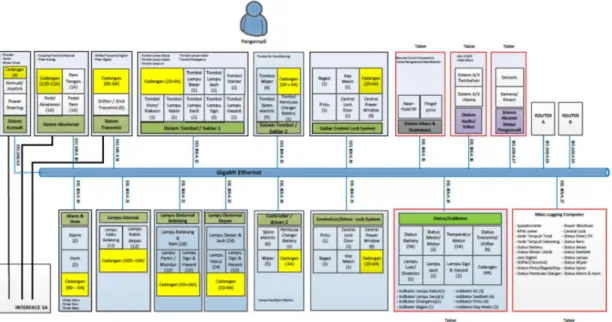
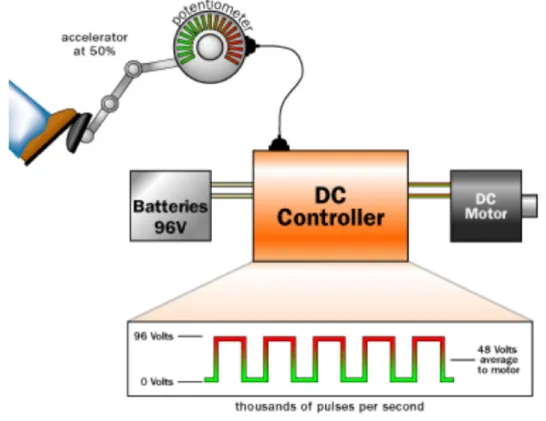
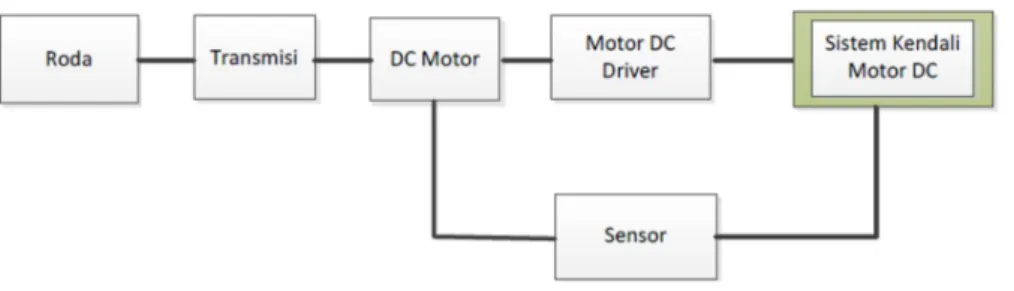
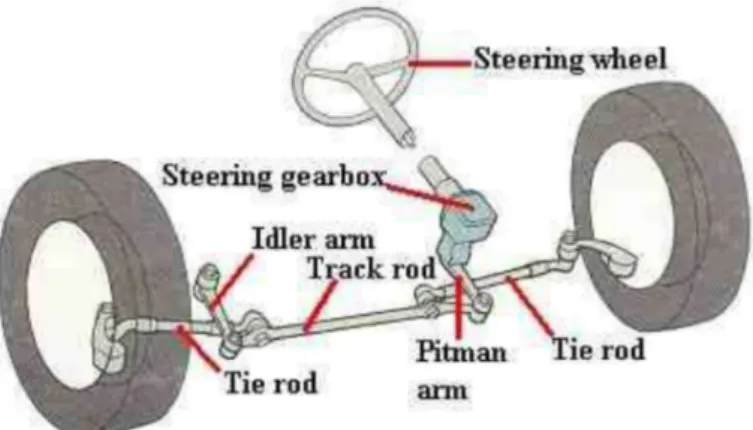
Proposal penelitian yang diajukan akan fokus pada program perancangan Sistem Pengendalian Mobil Listrik (berlokasi di Jaringan I). Kecepatan kendaraan dikendalikan oleh sistem kendali mobil listrik dengan cara mengendalikan tekanan pada pedal akselerator atau akselerator. Sistem pengereman dapat dilakukan dengan mengendalikan putaran mesin dan juga putaran roda mobil listrik.
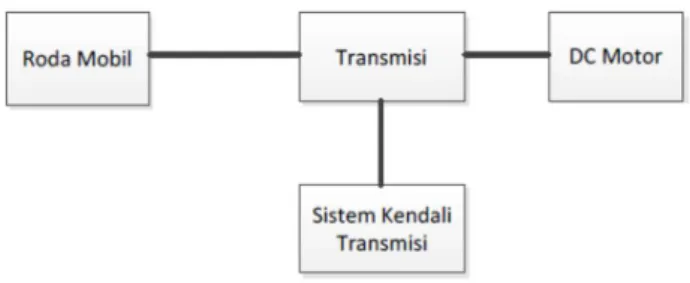
Sistem kendali tenaga pada mobil listrik yang akan dibangun menggunakan komputer sebagai sistem utama pengendaliannya.
PERANCANGAN KONTROL CAN BUS
Pendahuluan
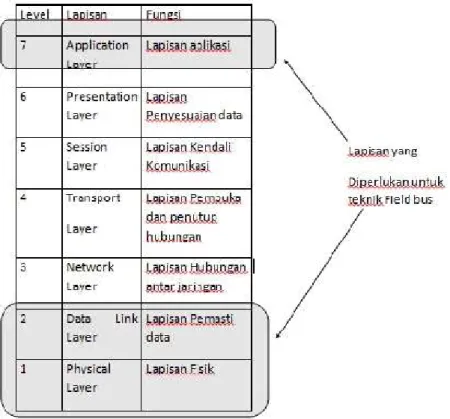
Organisasi Internasional untuk Standardisasi (ISO) menetapkan lapisan ISO/OSI-7, yang merupakan standar internasional untuk sistem komunikasi. Dalam sistem komunikasi sederhana (Field bus) tidak semua fungsi model OSI diperlukan. Selain itu, fungsi sistem otomasi, misalnya Routing (mencari jalur atau arah dalam jaringan yang kompleks), yang dipisahkan menjadi lapisan 4, tidak diperlukan lagi.
Pada lapisan ini, informasi yang dikirim dikemas dalam bentuk frame yang relevan dan dilengkapi dengan kode untuk pengujian kesalahan. Pengguna dapat menggunakan layanan yang diperlukan untuk fungsi komunikasi dasar yang diperlukan dalam aplikasi (misalnya, memulai dan mengakhiri hubungan).
Sistim Teknik Jaringan komunikasi
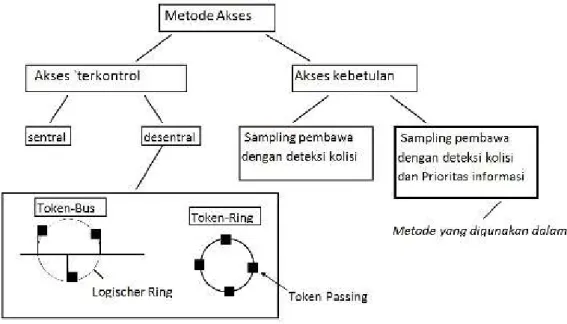
Bentuk jaringan merupakan hubungan antar sistem, umumnya ada beberapa bentuk topologi antara lain star, ring dan bus. Data berputar dalam ring satu kali dan menjangkau dari satu titik ke stasiun berikutnya. Jika banyak pengguna (stasiun) berkomunikasi pada suatu media fisik, maka perlu diatur akses terhadap media transfer data tersebut.
Dalam hal ini berlaku aturan dasar, hanya satu pengirim yang bisa aktif, namun penerima bisa mengaksesnya dalam waktu bersamaan. Pada metode terkontrol, dibedakan lebih lanjut antara pendelegasian hak akses secara terpusat (master, perangkat sinkronisasi) atau desentralisasi melalui kesepakatan antar pengguna, misalnya dengan penyerahan token dari satu pengguna ke pengguna lainnya. Karena metode ini dapat diterapkan ke banyak pengguna secara bersamaan dan dengan demikian memicu tabrakan, maka wajib menerapkan pengaturan sesuai metode untuk menghindari atau memicu situasi seperti itu.
Rancangan Komunikasi pada CAN
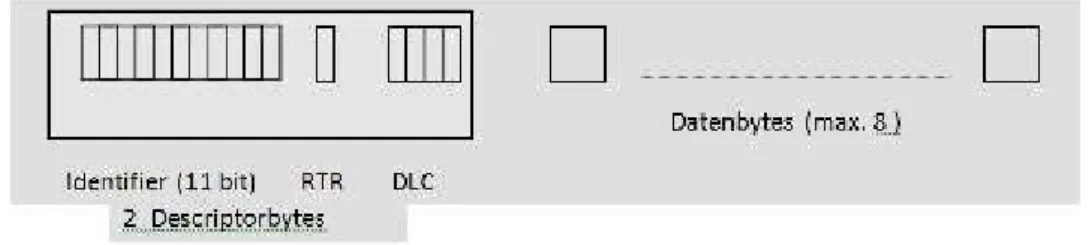
Pada Extended CAN (CAN Spesifikasi 2.0 B) terdapat pengenal 29 bit sehingga hingga 538 juta informasi dapat dibedakan. Jika pengguna memiliki informasi ini, pengguna tersebut memposisikan dirinya untuk menyiarkannya ke semua pengguna. Sekarang banyak chip protokol yang dipasok ke pemrogram aplikasi yang semuanya perlu membentuk informasi CAN dalam register tertentu.
Untuk standar CAN, yang terdiri dari pengidentifikasi, bit RTR dan jumlah byte data (DLC) dikodekan dalam dua byte (Descriptorbytes).
Perangkat Keras Sederhana
Jarak pengereman adalah jarak yang diperlukan kendaraan untuk berhenti total sejak pengemudi menginjak rem. Sinyal PWM dari mikrokontroler digunakan untuk mengatur kecepatan motor DC sebagai penggerak utama kendaraan.Sistem otomasi pengereman elektrik motor DC yang digunakan sebagai acuan sistem keselamatan motor listrik dirancang menggunakan ping- mengetikkan sensor ultrasonik sebagai parameter tegangan yang diterima motor DC. Perencanaan penyediaan tenaga listrik ini memuat rancangan penyediaan tenaga listrik yang akan dibuat dan digunakan beserta uraian perancangan yang terdiri dari komponen-komponen yang digunakan dalam bentuk uraian atau dalam bentuk tabel.
Untuk membuat catu daya DC (Direct Current) yang digunakan sebagai listrik pada suatu perangkat, diperlukan rangkaian yang dapat mengubah tegangan AC (Alternating Current) menjadi DC (Direct Current). Sedangkan tegangan yang digunakan pada rangkaian elektronika biasanya hanya berkisar antara 3V hingga 50V DC (Direct Current). Input pada frame alat pendeteksi jarak ini menggunakan sensor ultrasonik dan menggunakan simulasi dengan mobil listrik.
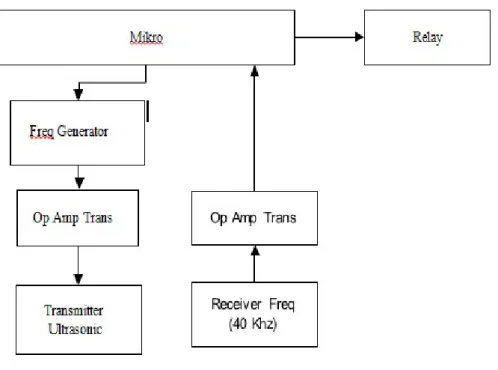
Sensor ultrasonik akan mendeteksi jarak dengan komponen pendukung IC LM 358 dan frekuensi generator yang berguna untuk memperkuat gelombang sinyal sensor dan akan diproses di mikrokontroler AT89S52 sehingga sensor akan bekerja dengan baik dalam jarak yang ditentukan. Sensor ini mempunyai fungsi untuk mengubah besaran jarak menjadi besaran listrik dalam bentuk tegangan (Arifianto, 2011). Sensor ultrasonik yang digunakan pada penelitian ini merupakan komponen elektronik dan juga mempunyai generator frekuensi terhubung impedansi rendah dan IC LM 358 sebagai penguat sinyal sensor.
Port P2.6 sebagai proses mikro memberikan perintah kepada IC 4069N dan generator frekuensi untuk memperkuat gelombang sinyal, sehingga keluaran sensor ultrasonik dapat mendeteksi jarak dengan benar. Jika sensor mendeteksi suatu benda di depan pada jarak yang telah ditentukan, gelombang menerima port P2.7 sebagai proses masukan sensor dan penerima gelombang sinyal. Perancangan keluaran ini berisi rancangan keluaran yang menjelaskan bahwa ketika sensor mendeteksi suatu benda pada jarak yang telah ditentukan maka tegangan keluaran mikrokontroler sebesar 0,05V pada relay dan buzzer.
Jika sensor ultrasonik mendeteksi jarak semakin dekat, maka buzzer akan menyala dan memutus tegangan sistem pengereman hingga mobil berhenti secara otomatis. Pengukuran catu daya dilakukan dengan menggunakan multimeter digital yang dihubungkan dengan kaki input untuk mengukur tegangan input dan kaki output untuk mengukur tegangan output. IC regulator yang diukur adalah IC 7805. Sensor ultrasonik diuji dengan memberikan catu daya 5V pada suatu rintangan, benda atau benda, sedangkan tegangan keluarannya diamati langsung dengan voltmeter.
Dari pengujian diketahui bahwa ketika mendeteksi jarak sebelum ada benda atau benda di depannya maka tegangan keluaran sensor adalah 0,35 Volt, dan ketika ada benda di depannya maka tegangan keluaran sensor berubah menjadi 2,2 Volt, maka sensor bekerja dengan baik seperti terlihat pada tabel 5.3. Pengujian rangka alat penginderaan jauh menggunakan sensor ultrasonik dilakukan dengan menyuplai daya pada rangkaian sensor 5 Volt.