PERANCANGAN SISTEM PENGGERAK LENGAN ROBOT DENGAN (PULSE WIDTH MODULATION) PADA FPGA
(FIELD PROGRAMABLE GATE ARRAY)
Disusun untuk memenuhi tugas akhir matakuliah Desain Sistem Digital
Oleh:
1. Adi Pratama (135150300111025) 2. Afdy Clinton (135150300111026) 3. Akbar Pandu Segara (135150307111018) 4. Dany Rahmana (135150300111027) 5. Dwi Firmansyah (135150301111136) 6. Eko Hilmi Firmansyah (135150301111021) 7. Hendra Danu Laksana (135150300111071) 8. Ikhwan Zulfy (135150301111054) 9. Rezak Andri Purnomo (135150301111048) 10. Rizki Arrum Fathoni (135150300111029) 11. Zhafran Wadiansyah (135150300111057)
Dosen Pengampu:
Dahnial Syauqy, S.T., M.T., M.Sc.
PROGRAM TEKNOLOGI INFORMASI DAN ILMU KOMPUTER UNIVERSITAS BRAWIJAYA
MALANG
2015
ii
DAFTAR ISI
HALAMAN JUDUL ... i
DAFTAR ISI ... ii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 2
1.3 Tujuan ... 2
1.4 Manfaat ... 2
BAB II TINJAUAN PUSTAKA ... 3
2.1 Manipulator Robot……… 3
2.2 FPGA……… 4
2.3 VHDL……….. 7
BAB III METODOLOGI DAN PERANCANGAN ... 9
3.1 Spesifikasi Sistem dan Prinsip Kerja ... 9
3.1.1 Spesifikasi Sistem Perancangan Penggerak Lengan Robot ... 9
3.1.2 Prinsip dan Cara Kerja dari Perancangan Penggerak Lengan Robot ... 9
3.2 Blok Diagram……… 11
3.3 Perancangan Sistem ... 11
3.3.1 Perancangan Input ... 11
3.3.2 Perancangan Output ... 11
BAB IV PEMBAHASAN ... 15
4.1 Flowchart Pemrograman ... 15
4.2 Bentuk Fisik Sistem ... 15
BAB V PENUTUP ... 16
iii
5.1 Kesimpulan ... 16
5.2 Saran ... 16
Daftar Pustaka ... 12
Lampiran 1: Source code dan file UCF ... 13
Lampiran 2: Anggota tim project ... 18
1 BAB I
PENDAHULUAN
1.1 Latar Belakang
Penggunaan robot dalam kehidupan sehari-hari terus meningkat karena robot memiliki banyak keunggulan. Robot memiliki tingkat ketelitian dan produktivitas kerja yang tinggi sehingga dapat meningkatkan volume produksi di suatu industri. Robot mampu bekerja dalam operasi-operasi yang dianggap berisiko tinggi bagi manusia. Selain itu, robot mampu mengerjakan proses secara terus-menerus yang tidak mampu dilakukan oleh manusia. (Yani, 2008)
Lengan robot adalah salah satu bentuk produksi dalam bidang robotika.
Lengan robot dirancang menyerupai tangan manusia agar dapat berfungsi sebagai organ tangan. Lengan robot dilengkapi dengan actuator dan memiliki 3 Degree of Freedom (DOF) atau lebih. Bagian ujung lengan robot disebut dengan end- effector. Bagian ini bisa berupa perangkat pengelas, pengecat, peralatan mesin atau gripper (berfungsi untuk menggenggam). Untuk melaksanakan fungsinya lengan robot dapat dikontrol dengan menggunakan FPGA oleh pengguna.
(Andreas, 2010)
Dengan adanya projek akhir mata kuliah Desain Sistem Digital yang diampu oleh Bapak Dahnial Syauqy S.T M.T maka kelompok kami membuat sebuah system embedded yang berlatar robot. Robot disini merupakan sebuah alat yang bisa melakukan sesuai keinginan manusia. Sehingga apapun pekerjaan yang diinginkan oleh manusia bisa dikendalikan oleh sebuah robot. Dalam project ini akan kami membuat “Sistem Kendali Lengan Robot dengan Pulse Width Modulation” yang bisa dikendalikan sesuai kebutuhan kita, seperti layaknya lengan manusia diantaranya mengambil dan melakukan perubahan gerak.
2 1.2 Rumusan Masalah
a) Apa saja yang menjadi spesifikasi pada sistem kendali perancangan penggerak robot lengan ?
b) Bagaimana prinsip kerja pada perancangan penggerak robot lengan ?
c) Bagaimana bentuk dari blok diagram perancangan penggerak robot lengan ? d) Mengapa perlu adanya flow chart dalam perancangan sistem robot lengan ? e) Mengapa dalam mekanisme sistem menggunakan FPGA Spartan 3E untuk
program robot lengan ?
1.3 Tujuan
a) Untuk mengetahui spesifikasi sistem yang bekerja pada rancangan penggerak robot lengan.
b) Untuk menjelaskan dasar – dasar cara kerja jalannya penggerak robot lengan.
c) Untuk memperjelas dari prinsip kerja penggerak dengan uraian penjelasan diagram – diagram yang tersusun.
d) Untuk memperdalam pemahaman arti sebuah makna alur kerja sistem dari blok diagram yang tercantum.
e) Untuk memahami cara kerja FPGA, baik pemrogramannya maupun perangkat kerasnya.
1.4 Manfaat
Dalam “Perancangan Sistem Penggerak Robot Lengan” manfaat yang diperoleh adalah dapat memahami cara pengimplementasian xilinx spartan 3E terhadap robot lengan dan metode PWM dalam memanipulasi sinyal clock.
3 BAB II
TINJAUAN PUSTAKA
2.1 Manipulator Robot
Manipulator robot adalah robot yang dibuat dengan desain khusus untuk melakukan fungsi tertentu, sehingga dapat memanipulasi objek. Manipulator robot biasa digunakan dalam aplikasi industri, pertanian dan kesehatan.
Berbagai jenis gerakan manipulator robot yang terdiri dari berbagai konfigurasi termasuk ke dalam jenis gerak robot holomonic.
Gambar Bentuk-bentuk konfigurasi manipulator robot
(a) konfigurasi polar (b) konfigurasi silinder (c) konfigurasi cartesian (d) konfigurasi sendi lengan. (Pitowarto, 2006)
4 2.1.1 Lengan Robot
Lengan robot terdiri dari tiga bagian yaitu struktur mekanik (manipulator), penggerak dan sistem kontrol. Manipulator adalah susunan benda-benda kaku (rigid bodies) dan lengan (link) yang satu sama lain terhubung oleh sendi (joint). Pangkal lengan dapat dipasang pada kerangka dasar. Sedangkan ujung lengan (end-effectgor) dapat dihubungkan dengan alat tertentu sesuai dengan fungsi lengan robot. (Balza, 2008)
Ada dua jenis sistem kontrol lengan robot, yaitu sistem kontrol loop terbuka dan sistem kontrol loop tertutup. Pada sistem kontrol loop terbuka output tidak diumpan balikkan ke input. (Hari, 1996)
2.1.2 Degree of Freedom
Derajat kebebasan (Degree of Freedom) adalah sambungan pada lengan, dapat dibengkokkan, diputar, maupun digeser. Derajat kebebasan digunakan untuk mengetahui cara robot bergerak, tingkat kerumitan algoritma kendali dan jumlah motor lengan robot yang digunakan.
Penentuan jumlah DOF dilakukan berdasarkan jumlah gerakan yang dapat dilakukan oleh lengan robot atau jumlah aktuator lengan robot. (Britantyo, 2008)
2.2 FPGA
FPGA adalah logic device yang terdiri dari larik 2 dimensi dari logic cell dan programmable switches. FPGA diprogram dengan menggunakan diagram rangkaian logika atau menggunakan HDL (Hardware Description Language), untuk menetapkan bagaimana chip-bekerja.
FPGA memiliki komponen gerbang terprogram (programmable logic) dan sambungan terprogram. Komponen gerbang terprogram yang dimiliki meliputi jenis gerbang logika biasa (AND, OR, XOR, NOT) maupun jenis fungsi matematis dan kombinatorik yang lebih kompleks (decoder, adder, subtractor, multiplier, dll). Blok-blok komponen di dalam FPGA bisa juga mengandung elemen memori (register) mulai dari flip flop sampai pada RAM (Random Access Memory). Gambar arsitektur FPGA dapat dilihat pada gambar:
5 FPGA Architecture
Gambar 2.1 Arsitektur FPGA (Saroso, 2009)
Pengertian terprogram (programmable) dalam FPGA adalah mirip dengan interkoneksi saklar dalam breadboard yang bisa diubah oleh pembuat desain.
Dalam FPGA, interkoneksi ini bisa diprogram kembali oleh pengguna maupun pendesain di dalam lab atau lapangan (field). Oleh karena itu jajaran gerbang logika (Gate Array) ini disebut field-programmable. Jenis gerbang logika yang bisa diprogram meliputi semua gerbang dasar untuk memenuhi kebutuhan yang manapun.
Fisik dari FPGA (field Programmable Gate Array) berbentuk chip IC.
Setiap chip PGA terdiri dari puluhan hingga puluhan ribu sel logika. Masing- masing sel logika mempunyai keluaran yang berjumlah satu atau dua, tergantung dari fungsinya. Secara umum,arsitektur FPGA dapat dipanndang sebagi kumpulan blok, dimana tiga elemen penyusunnya adalah CLB (Combinational Logic Block), IOB (input/output block), dan interkoneksi. Untuk memiliih FPGA membutuhkan analisis mengenai memory, performance, dan I/O interface.
Perkembangan FPGA pada saat ini berlangsung sangat cepat. Xilinx merupakan salah satu perusahaan yang memproduksi FPGA. Beberapa jenis FPGA yang telah diproduksi adalah VIRTEX, SPARTAN, XC4000, dan XC5000.
6 FPGAs berbeda dari General-purpose mikroprosesor (misalnya Intel) dalam hal fleksibilitas logic-nya. Mikroprosesor mempunyai hardware yang tetap. Assembly programmer memprogram suatu komputasi dengan keterbatasan pada tetapnya banyak register, siklus fetch-decodeexecute, serta fungsi-fungsi ALU (arithmetic and logic unit) dan pada banyaknya bit suatu register. FPGAs berbeda dari mikrokontroler (misalnya ATMEL), karena mikrokontroler pada prinsipnya adalah mikroprosesor yang diprogram dengan bahasa assembly dan dirancang sebagai pengendali bukan untuk komputasi. Mikroprosesor dan mikrokontroler mengimplementasikan suatu komputasi pada hardware yang tetap. Hardware pada FPGAs diserahkan sepenuhnya pada design engineer untuk memprogramnya. Sebelum diprogram, FPGAs hanyalah tersusun atas blok-blok yang belum dikonfigurasikan dan interkoneksi yang belum disusun dan difungsikan. Oleh karena itu, istilah yang lebih tepat adalah merekonfigurasikan FPGAs, bukan memprogramnya. Chip FPGAs yang sama dikonfigurasikan FPGAs, bukan memprogramnya. Chip FPGAs yang sama dikonfigurasikan dengan data yang berbeda akan mengimplementasikan hardware yang berbeda.
Alur kerja yang umum dalam memprogram FPGA:
1. Menggunakan komputer untuk mendeskripsikan fungsi logika yang diinginkan. Bisa dengan menggambar skematiknya atau menuliskan programnya.
2. Menyusun (compile) fungsi logika, menggunakan software yang disediakan oleh vendor FPGA, lalu membuat file biner yang dapat diunduh ke dalam FPGA.
3. Menghubungkan kabel dari komputer ke FPGA, dan mengunduh file biner ke FPGA.
Arsitektur FPGA paling umum terdiri atas susunan dari CLB (configurable logic blocks), pad I/O, dan routing channel. Struktur tersebut dapat dilihat pada gambar. Blok logika FPGA (model awal/klasik) terdiri dari 4-input lookup
7 table(LUT), dan flip-flop. DEwasa ini, pabrikan FPGA telah mulai mengganti dengan 6-input LUT dalam komponen performa tinggi mereka.
Gambar Struktur Umum FPGA (Saroso, 2009) 2.3 VHDL
VHDL (VHSIC Hardware Description Language) adalah sebuah bahasa pemrograman VHSIC (Very High Speed Integrated Circuit) yang dikembangkan oleh IEEE(Institute of Electrical and Electronic Engineering). Versi awal dari VHDL adalah versi 1987 (IEEE 1076-1987). VHDL termasuk dalam bahasa pemodelan yang digunakan untuk merancang atau memodelkan rangkaian digital. Keuntungan pada penggunaan VHDL, yaitu:
a. VHDL mampu melakukan desain hardware hingga sistem yang lebih kompleks
b. Mudah dalam mencari dan mendeteksi kesalahan dengan lebih mudah dalam simulasi
c. Bahasa pemrograman yang mudah dimengerti dan dipelajari
Sebuah sistem digital dapat diwakili pada tingakatan abstraksi yang berbeda. HAl ini membuat deskripsi dan rancangan sistem yang kompleks dapat diatur. Gambar di ini menjelaskan tentang tingkatan abstraksi tersebut.
8 Gambar Tingkatan Abstraksi (Van der Spiegel, 2009)
9 BAB III
METODOLOGI DAN PERANCANGAN
3.1 Spesifikasi Sistem dan Prinsip Kerja
3.1.1 Spesifikasi Sistem Perancangan Penggerak Lengan Robot Alat yang dibutuhkan :
NAMA ALAT DAN BAHAN KETERANGAN JUMLAH
MICA ACRYLIC - -
MUR 0,3 mm 17 buah
BAUT 6 dan 12 mm 29 buah
SERVO SG 90 3 buah
JUMPER Male dan Female 12 buah
FPGA SPARTAN 3E Starter Kit Board 1 buah
LAPTOP ASUS 45 U 1 buah
Tabel 3.1 Alat dan Bahan
3.1.2 Prinsip dan Cara Kerja dari Perancangan Penggerak Lengan Robot Servo;
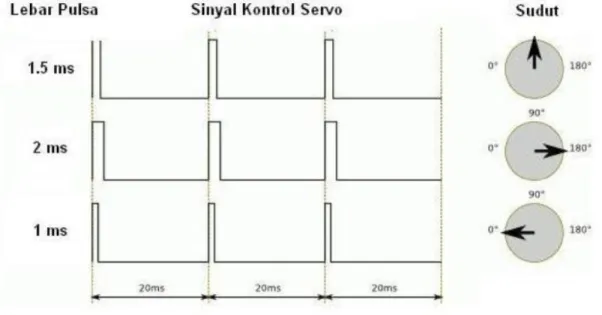
Pengendalian gerakan batang motor servo dapat dilakukan dengan menggunakan metode PWM. (Pulse Width Modulation). Teknik ini menggunakan system lebar pulsa untuk mengemudikan putaran motor.
Sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Tampak pada gambar dengan pulsa 1.5 ms pada periode selebar 2 ms, maka sudut dari sumbu
10 motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum jam. Untuk menggerakkan motor servo ke kanan atau ke kiri, tergantung dari nilai delay yang kita berikan. Untuk membuat servo pada posisi center, berikan pulsa 1.5ms.Untuk memutar servo ke kanan, berikan pulsa <=1.3ms, dan pulsa >= 1.7ms untuk berputar ke kiri dengan delay 20ms, seperti ilustrasi berikut:
Gambar 3.1 Sinyal Kontrol Servo
11 3.2 Blok Diagram
PUSH BUTTON 1
PUSH BUTTON 2
PUSH BUTTON 3
PUSH BUTTON 4
ROTARY PUSH BUTTON
FPGA
SERVO 1
SERVO 2
SERVO 3 PWM SIGNAL
C
Gambar 3.2 Blok Diagram Sistem
Pada blok diagram dalam perancangan penggerak lengan robot ini, menggunakan input sistem nya yang terdiri dari empat buah push button dan rotary push button (kanan, kiri, dan push) setelah input yang digunakan, kemudian masuk ke dalam sistem program FPGA Spartan 3E yang didalamnya terdapat program – program terstruktur yang terdiri dari source code dan file UCF nya. Dengan adanya program – program tersebut kemudian PWM (Pulse Width Modulation) menangkap sinyal – sinyal yang sudah di-input-kan sehingga masukan di salurkan menjadi sebuah bentuk hasil yang terdiri dari tiga buah servo.
3.3 Perancangan Sistem 3.3.1 Perancangan Input
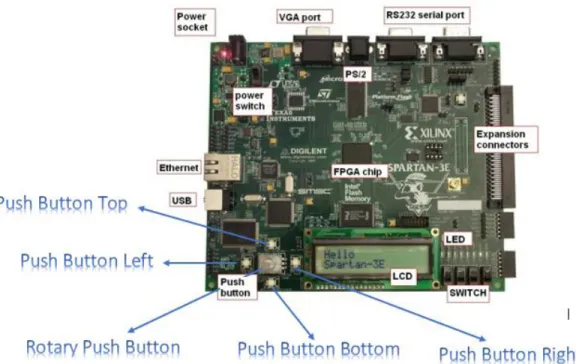
Perangkat input :
Push Button Spartan, terdiri dari : a) Push Button Right
b) Push Button Left c) Push Button Top d) Push Button Bottom
12 Rotary Push Button Spartan, terdiri dari :
a) Rotary Push Button Right b) Rotary Push Button Left
c) Rotary Push Button Center Push
Gambar 3.3.1 Input Robot Lengan Meggunakan Xilinx Spartan 3E Source Code Input Entity
entity PWM_control is Port (
Right_B : in STD_LOGIC;
Left_B : in STD_LOGIC;
Up_B : in STD_LOGIC;
Down_B : in STD_LOGIC;
Front_B : in STD_LOGIC;
Back_B : in STD_LOGIC;
Netral_B : in STD_LOGIC;
Real_Clock : in STD_LOGIC;
Pwm_X : out STD_LOGIC;
Pwm_Y : out STD_LOGIC;
Pwm_Z : out STD_LOGIC
13 );
end PWM_control;
3.3.2 Perancangan Output Perangkat output:
Servo, terdiri dari : a) Servo 1
b) Servo 2 c) Servo 3
Gambar 3.3.2 Output Robot Lengan Menggunakan Servo
14 Gambar 3.3 Perancangan Input Sistem
Masukan (integer)
Nilai pembagi frekuensi
Lebar pulsa 1 (ms)
Lebar pulsa 0 (ms)
Ouput servo (derajat)
500000000 1 1 19 0
500000000 1 1,5 18,5 90
500000000 1 2 18 180
Tabel 3.1. Hubungan Masukan dan Keluaran PWM
15 BAB IV
PEMBAHASAN
4.1 Flowchart pemrograman
Gambar 4.1. Flowchart sistem 4.2 Bentuk Fisik Sistem
Gambar 4.2. Bentuk fisik sistem
16 BAB V
PENUTUP
5.1 Kesimpulan
Banyak sekali jenis dan metode pembuatan robot yang sudah ada.
Beberapa jenis robot yang kami ketahui adalah robot mobile, robot jaringan, robot manipulator (tangan), robot humanoid dan masih banyak robot canggih lainnya.
Robot lengan yang kita buat adalah salah satu robot manipulator yang menggunakan metode PWM dalam mekanisme pergerakannya. Kegunaan PWM dalam project ini untuk memanipulasi sinyal clock agar pergerakkan servo dapat diatur sesuai keinginan.
5.2 Saran
Diharapkan untuk projek penelitian selanjutnya:
a. Mampu menggerakkan dan mengontrol servo lebih dari satu secara bersamaan.
b. DOF atau Derajat Kebebasan Lengan Robot Lebih bervariasi.
c. Terkait pembelajaran kuliah; Penyampaian yang lebih baik ke audiensi agar lebih memahami materi yang disampaikan.
17 DAFTAR PUSTAKA
Andreas W.S, dkk. 2010. Robot Lengan 3 DOF dengan Input Sinyal EMG. Teknik Elektronika Politeknik Negeri Surabaya. Surabaya.
Balza Achmad, dkk. 2008. Simulator Lengan Robot Enam Derajat Kebebasan Menggunakan Opengl. Jurusan teknik Fisika, Fakultas Teknik Universitas Gadjah Mada. Yogyakarta.
Brintantyo Wicaksono. 2008. Sistem Kontrol Lengan Robot menggunakan Mikrokontroller 16-BIT H8/3069F. Departemen Fisika. Universitas Indonesia.
Hari S Basuki. 1996. Puslitbang INKOM-LIPI Bulletin IPT, No. 1 Vol. II, April/Mei.
Pitowarno, Endra. 2006. “ROBOTIKA: Desain, Kontrol, dan Kecerdasan Buatan“. Yogyakarta : Andi Offset.
Saroso, Dony Harris. 2009. "Desain Function Generator Berbasis PLD (FPGA)".
Universitas Indonesia. Depok.
Van der Spiegel, Jan. 2009. "VHDL tutorial". University of Pennsylvania.
18 LAMPIRAN I : SOURCE CODE dan FILE UCF
A. Source Code
--- -- Company:
-- Engineer:
--
-- Create Date: 11:07:08 05/11/2015 -- Design Name:
-- Module Name: PWM_control - Behavioral -- Project Name:
-- Target Devices:
-- Tool versions:
-- Description:
--
-- Dependencies:
--
-- Revision:
-- Revision 0.01 - File Created -- Additional Comments:
--
--- library IEEE;
use IEEE.STD_LOGIC_1164.ALL;
use IEEE.NUMERIC_STD.all;
-- Uncomment the following library declaration if using -- arithmetic functions with Signed or Unsigned values --use IEEE.NUMERIC_STD.ALL;
-- Uncomment the following library declaration if instantiating -- any Xilinx primitives in this code.
--library UNISIM;
--use UNISIM.VComponents.all;
entity PWM_control is Port (
Right_B : in STD_LOGIC;
Left_B : in STD_LOGIC;
Up_B : in STD_LOGIC;
Down_B : in STD_LOGIC;
Front_B : in STD_LOGIC;
Back_B : in STD_LOGIC;
Netral_B : in STD_LOGIC;
Real_Clock : in STD_LOGIC;
Pwm_X : out STD_LOGIC;
Pwm_Y : out STD_LOGIC;
Pwm_Z : out STD_LOGIC );
end PWM_control;
19 architecture Behavioral of PWM_control is
signal prescaler_x : unsigned(19 downto 0) :=X"00000";
signal servo_x : unsigned(19 downto 0) :=X"124F8";
signal state_x : std_logic;
signal prescaler_y : unsigned(19 downto 0) :=X"00000";
signal servo_y : unsigned(19 downto 0) :=X"124F8";
signal state_y : std_logic;
signal prescaler_z : unsigned(19 downto 0) :=X"00000";
signal servo_z : unsigned(19 downto 0) :=X"124F8";
signal state_z : std_logic;
begin
pwm_servo_x : process (Real_Clock) begin
if (rising_edge(Real_Clock))then if(Netral_B='0') then
if(Right_B='1' and Left_B='0')then
--if(Right_B='0' and Left_B='1') then if(servo_x>=X"061A8")then
servo_x<=X"061A8";
else
servo_x<=servo_x - X"001F4";
end if;
--end if;
elsif(Left_B='1' and Right_B='0')then --if(Left_B='0' and Right_B='1')then
if(servo_x>=X"1E848")then servo_x<=X"1E848";
else
servo_x<=servo_x + X"001F4";
end if;
end if;
--end if;
else
servo_x <= X"124F8";
end if;
prescaler_x <= prescaler_x + "1";
if prescaler_x < servo_x then state_x <= '1';
elsif prescaler_x >= servo_x and prescaler_x <
(X"F4240") then
state_x <= '0';
elsif prescaler_x = (X"F4240") then prescaler_x <= (others => '0');
state_x <= '1';
end if;
20 end if;
end process pwm_servo_x;
Pwm_X<=state_x;
pwm_servo_y : process (Real_Clock) begin
if (rising_edge(Real_Clock))then if(Netral_B='0') then
if(Up_B='1' and Down_B='0')then if(servo_y>=X"061A8")then servo_y<=X"061A8";
else
servo_y<=servo_x - X"001F4";
end if;
elsif(Down_B='1' and Up_B='0')then if(servo_y>=X"1E848")then
servo_y<=X"1E848";
else
servo_y<=servo_y + X"001F4";
end if;
end if;
else
servo_y <= X"124F8";
end if;
prescaler_y <= prescaler_y + "1";
if prescaler_y < servo_y then state_y <= '1';
elsif prescaler_y >= servo_y and prescaler_y <
(X"F4240") then
state_y <= '0';
elsif prescaler_y = (X"F4240") then prescaler_y <= (others => '0');
state_y <= '1';
end if;
end if;
end process pwm_servo_y;
Pwm_Y<=state_y;
pwm_servo_z : process (Real_Clock) begin
if (rising_edge(Real_Clock))then if(Netral_B='0') then
21 if(Front_B='1' and Back_B='0')then
if(servo_z>=X"061A8")then servo_z<=X"061A8";
else
servo_z<=servo_z - X"001F4";
end if;
elsif(Back_B='1' and Front_B='0')then if(servo_z>=X"1E848")then
servo_z<=X"1E848";
else
servo_z<=servo_z + X"001F4";
end if;
end if;
else
servo_z <= X"124F8";
end if;
prescaler_z <= prescaler_z + "1";
if prescaler_z < servo_z then state_z <= '1';
elsif prescaler_z >= servo_z and prescaler_z <
(X"F4240") then
state_z <= '0';
elsif prescaler_z = (X"F4240") then prescaler_z <= (others => '0');
state_z <= '1';
end if;
end if;
end process pwm_servo_z;
Pwm_Z<=state_z;
end Behavioral;
22 B. UCF code
NET"Up_B" LOC= "H13" | IOSTANDARD= LVTTL | PULLDOWN;
NET"Front_B" LOC= "V4" | IOSTANDARD= LVTTL | PULLDOWN;
NET"Back_B" LOC= "K17" | IOSTANDARD= LVTTL | PULLDOWN;
NET"Down_B" LOC= "D18" | IOSTANDARD= LVTTL | PULLDOWN;
NET"Real_Clock" LOC= "C9" | IOSTANDARD= LVCMOS33 ;
TIMESPEC TS_Real_Clock = PERIOD "Real_Clock" 20 ns HIGH 50 %;
NET"Right_B" LOC= "K18" | IOSTANDARD= LVTTL | PULLUP;
NET"Left_B" LOC= "G18" | IOSTANDARD= LVTTL | PULLUP;
NET"Pwm_X" LOC= "B4" | IOSTANDARD= LVTTL | SLEW= SLOW | DRIVE= 6
;
NET"Pwm_Y" LOC= "A4" | IOSTANDARD= LVTTL | SLEW= SLOW | DRIVE= 6
;
NET"Pwm_Z" LOC= "D5" | IOSTANDARD= LVTTL | SLEW= SLOW | DRIVE= 6
;
NET"Netral_B" LOC= "V16" | IOSTANDARD= LVTTL | PULLDOWN;
23 LAMPIRAN II: ANGGOTA TIM PROJECT
Anggota 1
Nama (opsional) Adi Pratama
NIM (opsional) 135150300111025
Komentar tentang penyampaian pembelajaran mata kuliah saat ini
Dosennya antusias mengajar, udah benar.
Saran untuk pembelajaran kedepan 1. Ketika mengajar, direkam dan dipilih video yang bagus untuk di-upload di internet.
Lagipula agar lebih hemat energi yang mana dosennya ngomong hal yg sama berulang- ulang untuk kelas yg berbeda. Waktu di kelas cukup digunakan untuk Tanya-jawab, sedangkan kuliah bisa menggunakan video rekaman yg sudah di-upload. Mirip sistem kuliah MIT.
2. Terdapat lecture note, bukan dalam bentuk PPT.
3. Semua ujian sebaiknya open-book, pernah baca di Koran Jawa Pos, dari pakar pendidikan menjelaskan bahwa seiring waktu, negara- negara maju mulai mengubah sistem ujian mereka jadi open-book. Karena emang bahkan di dalam dunia kerja pun, pekerja atau pegawai bahkan atasan pun masih memiliki hak membawa dan membuka buku selama bekerja.
Anggota 2
Nama (opsional) Afdy Clinton
NIM (opsional) 135150300111026
24 Komentar tentang penyampaian
pembelajaran mata kuliah saat ini
Penyampaian materi sudah cukup jelas dan detail
Saran untuk pembelajaran kedepan 1. Kalau bisa bisa lebih di jelaskan struktur penulisan kode
2. Kalau bisa ditambahkan metode pembelajaran dan penghafalan struktur penulisan kode dengan cara menulis di kertas karena akan lebih diingat dibandingkan dengan langsung di aplikasi
Anggota 3
Nama (opsional) Akbar Pandu Segara
NIM (opsional) 135150307111018
Komentar tentang penyampaian pembelajaran mata kuliah saat ini
Penyampaian materi sudah bagus dan mahasiswa sudah bisa memahami apa yang disampaikan, namun suasana kelas kurang mencair perlu di selingi dengan guyonan agar lebih santai namun materi tetap masuk
Saran untuk pembelajaran kedepan 1. lebih mencairkan suasana kelas
2. jangan terlalu monoton tentang materi, namun sampaikan implementasi seperti video video agar lebih interaktif
Anggota 4
Nama (opsional) Dany Rahmana
NIM (opsional) 135150300111027
Komentar tentang penyampaian Saya sangat suka sekali metode
25 pembelajaran mata kuliah saat ini pembelajarannya, karena di setiap pertemuan
tidak hanya terfokus pada materi, akan tetapi juga langsung di praktekkan menggunakan alat Saran untuk pembelajaran kedepan 1. Lebih enjoy dalam penyampaian materi
2. Sebelum mahasiswa melakukan praktek, alangkah baiknya dijelaskan dahulu hardware yang akan dipakai untuk mengantisipasi kerusakan pada hardware
Anggota 5
Nama (opsional) Dwi Firmansyah
NIM (opsional) 135150301111136
Komentar tentang penyampaian pembelajaran mata kuliah saat ini
Metode pembelajaran sudah baik
Saran untuk pembelajaran kedepan 1. Adakan lebih banyak tugas, latihan, dan kuis agar mahasiswa lebih memahami materi yang disampaikan
Anggota 6
Nama (opsional) Eko Hilmi Firmansyah
NIM (opsional) 135150301111021
Komentar tentang penyampaian pembelajaran mata kuliah saat ini
Dalam penyampaian Bapak Dahnial Syauqy : 1. Pembelajaran, sangat ahli dan sangat bagus dan profesional karena cukup hanya dengan satu slide tetapi referensi yang diajar sangat luas dan berkembang dengan mengambil contoh sehari – hari.
2. Penyampaian, sangat handal dan cukup mengena sehingga mahasiswa dapat
26 memahami, sebagai contoh memberi penyampaian dengan gambaran real yang lansung di dalam praktikumnya.
Saran untuk pembelajaran kedepan 1. Mungkin bisa menambahkan video – video yang bisa membangun dan cukup membangun imajinasi mahasiswa, karena pada dasarnya manusia lebih paham dengan gambaran – gambaran bukan sekadar konsep saja.
Anggota 7
Nama (opsional) Hendra Danu Laksana
NIM (opsional) 135150300111071
Komentar tentang penyampaian pembelajaran mata kuliah saat ini
Interaktif, mudah dipahami, jelas
Saran untuk pembelajaran kedepan 1. Lebih banyak latihan ke hardware langsung 2. Diadakan praktikum
Anggota 8
Nama (opsional) Ikhwan Zulfy
NIM (opsional) 135150301111054
Komentar tentang penyampaian pembelajaran mata kuliah saat ini
Sudah bagus untuk penyampaiannya
Saran untuk pembelajaran kedepan 1.Mungkin lebih ditingkatkan lagi penyampaian materinya agar lebih menarik dan mudah dipahami oleh mahasiswa
2.Mungkin bisa memberikan contoh secara fisik lebih banyak lagi karena pengaplikasian dari mata kuliah ini nantinya berupa project akhir yang berbentuk fisik
27 Anggota 9
Nama (opsional) Rezak Andri Purnomo
NIM (opsional) 135150301111048
Komentar tentang penyampaian pembelajaran mata kuliah saat ini
Materi yang disampaikan sangat baik dan jelas apalagi media/alat yang digunakan sangat bagus
Saran untuk pembelajaran kedepan Metode pembelajan menggunakan metode yang lebih kreatif lagi agar mahasiswa lebih dapat menyerap meteri yang disampaikan
Anggota 10
Nama (opsional) Rizki Arrum Fathoni
NIM (opsional) 135150300111029
Komentar tentang penyampaian pembelajaran mata kuliah saat ini
Penyampaian materi sudah baik
Saran untuk pembelajaran kedepan 1. lebih mencairkan suasana kelas
Anggota 11
Nama (opsional) Zhafran Wadiansyah
NIM (opsional) 135150300111057
Komentar tentang penyampaian pembelajaran mata kuliah saat ini
Sudah bagus model pembelajarannya.
Saran untuk pembelajaran kedepan 1. Agar jangan terlalu banyak menjelaskan codenya. Lebih baik langsung praktek. Karena inti dari mata kuliah ini adalah prakteknya