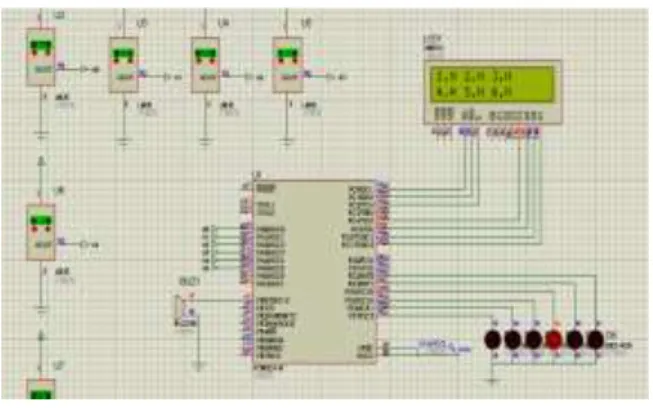
Tujuan dari penelitian ini adalah merancang sistem peringatan suhu rem berbasis mikrokontroler ATMega 16 dan membaca hasilnya yang dapat ditampilkan pada LCD pada dashboard kendaraan sehingga pengemudi dapat mengetahui informasi kondisi suhu kerja rem pada saat pengereman. . . Code Vision AVR adalah bahasa pemrograman yang digunakan dalam sistem perancangan suhu rem ini.

Kalibrasi alat
Simulasi Program dan Alat
Kondisi rem dalam suhu normal Dalam kondisi suhu rem normal, sensor akan
Kondisi rem mengalami overheating Ketika terjadi lonjakan suhu yang sudah melebihi
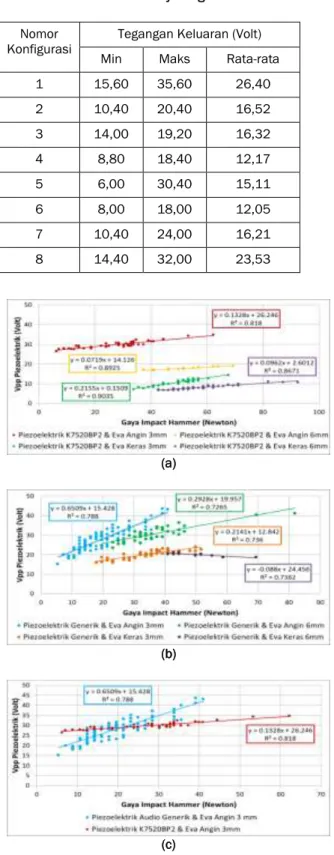
Sepatu piezoelektrik merupakan teknologi yang dikembangkan untuk memanfaatkan potensi jalan kaki manusia sebagai sumber energi terbarukan. Sistem yang paling efisien dipilih sebagai sistem yang paling sesuai untuk memanfaatkan potensi jalan kaki manusia sebagai sumber energi terbarukan dalam penelitian ini.
Konfigurasi Piezoelektrik
Kancing yang digunakan pada konfigurasi piezoelektrik terbuat dari bahan insole yang merupakan salah satu bahan penyusun struktur sol sepatu. Pengaruh ketebalan bahan insole akan diuji untuk menentukan konfigurasi piezoelektrik yang terbaik dan sesuai untuk memanen energi dari aktivitas berjalan manusia.
Pengujian
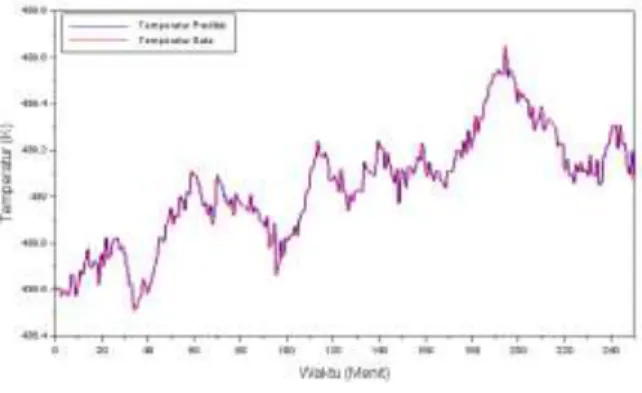
15 Tujuan dari penulisan ini adalah untuk memperoleh model matematis suhu air masuk dengan menggunakan identifikasi sistem input ARMAX (Auto Regressive Moving Average eXogonus input) [3,5,6]. Sedangkan keluaran tangki pemanas meliputi laju aliran oksigen dari ventilasi (̇) dan laju aliran massa air umpan ke tangki penyimpanan.
Identifikasi Sistem
Laju aliran kondensat didispersikan melalui spray nozzle pada tangki pemanas menjadi tetesan air (droplet) dengan diameter 300-2800 mm [7]. Masukan ke reservoir pemanas meliputi aliran kondensat (̇) dan aliran uap ekstraksi turbin.
Metode Recursive Least Square
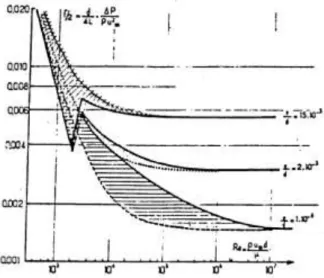
Dengan ini kita dapat memperoleh pernyataan tentang jumlah satuan energi yang hilang per satuan panjang sebagai :. Solenoid valve (SV-3) akan beroperasi untuk membuka dan mengalirkan hasil campuran cairan 2 warna yang telah tercampur dan tercampur dengan mixer dari tangki penampung hasil pencampuran (T-103) ke tangki penampung hasil akhir (T -106), hingga tangki penyimpanan terisi penuh. Hasil akhir (T-106).
Rancangan Perangkat
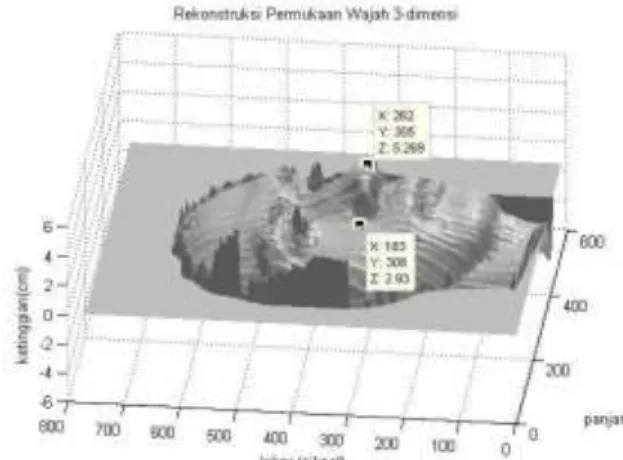
Kemudian ROI (Region of Interest) dipilih dan dilakukan proses pembukaan fase untuk mendapatkan informasi fase yang benar atau absolut dari gambar fase terlipat. Estimasi kualitas fasa bertujuan untuk mengetahui informasi keseluruhan dari citra fasa dan menyaring noise yang ada.
Rancangan Penelitian
Sebaliknya, rekonstruksi dengan frekuensi 7 siklus/100 piksel memberikan permukaan sinar yang lebih halus dengan noise rendah. Melalui analisis keakuratan perbandingan kedalaman dan hasil rekonstruksi objek, dipilih frekuensi 7 cycle/100 piksel yang memberikan hasil rekonstruksi optimal.

Penelitian pada Naracoba
Pengayun cincin mempunyai bunyi fasa yang tinggi berbanding dengan pengayun LC, tetapi pengayun cincin mempunyai julat penalaan yang lebih luas dan mudah untuk disepadukan ke dalam cip. Pengayun cincin, yang mempunyai julat penalaan yang luas dan sangat mudah untuk diintegrasikan ke dalam teknologi cip, adalah pilihan yang tepat dan telah digunakan secara meluas oleh penyelidik terdahulu.
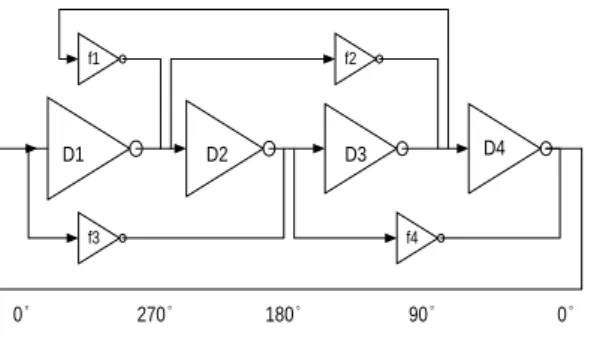
Osilator Cincin Quadrature
Untuk mencegah rangkaian osilator cincin dengan jumlah fasa genap yang memiliki keluaran statis beralih dengan menambahkan rangkaian. Tulisan ini membahas tentang peningkatan kinerja osilator cincin kuadratur dengan menambahkan rangkaian konverter maju dengan fasa berbeda pada setiap node antar konverter utama.
Percobaan Forbes et. al
58 bola sangat bergantung pada frekuensi instrumen, diameter dan kepadatan bola. Namun nilai TS juga sangat bergantung pada kecepatan rambat bunyi di dalam air dan di dalam bola, dimana faktor kecepatan bunyi sangat sulit untuk dihitung.
Parameter SONAR Source Level
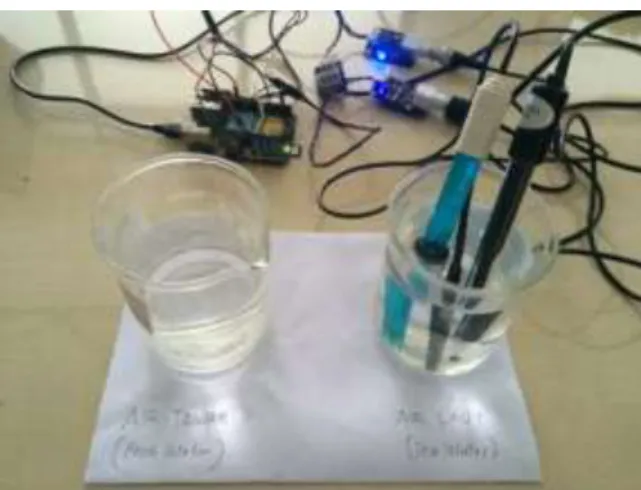
Pengukuran parameter fisik kelautan dilakukan dengan menggunakan alat ukur berbasis permukaan mikrokontroler Arduino Yun ATMega32 versi Surface Mount Device (SMD) yang dilengkapi dengan sensor suhu (DS18B20), pH meter dan konduktivitas (pengukur konduktivitas listrik). Oleh karena itu, diperlukan suatu teknologi berbasis instrumen yang memiliki kemampuan lebih baik dalam mengukur parameter fisik lautan.
Tujuan
Kegiatan penelitian di bidang kelautan khususnya pengukuran parameter fisik kelautan memerlukan suatu alat ukur yang tepat dan mudah digunakan. Pada penelitian ini dibuat alat ukur suhu, salinitas dan pH dengan menggunakan mikrokontroler Surface Mount Device (SMD) versi Arduino YUN ATMega32 yang nantinya akan diimplementasikan untuk mencatat data parameter fisik laut dalam jangka waktu tertentu.
Desain Alat
Rangkaian Skematik
Pengolahan Data
Pada penelitian ini digunakan teknik bidang tunggal dengan analisis vektor besaran getaran yang dihasilkan mesin yang terbukti tidak seimbang dan disebabkan oleh pemasangan beban uji pada rotor. Penganalisis getaran melakukan pengukuran ketika putaran motor stabil dan memperoleh data besaran dan fase karena ketidakseimbangan massa dan tambahan beban uji.
Ulasan Prinsip Kerja Motor [1]
Dari Hibah Pendidikan Tinggi, dana diterima untuk melakukan eksperimen dengan motor BLDC dan mempelajari cara kerja motor tersebut. Salah satu kelebihan motor BLDC dibandingkan motor DC adalah efisiensi yang lebih baik karena tidak menggunakan sikat (brushless).
Kemajuan Teknologi Penggerak Elektronik
Oleh karena itu, tujuan utama penggunaan motor BLDC pada mesin CNC telah tercapai dengan baik. Dalam prakteknya, mesin refrigerasi adsorpsi merupakan mesin refrigerasi yang menggantikan kompresor dengan adsorpsi bed sebagai penambah tekanan.
![Gambar 8: Koneksi Diagram Blok dari Motor BLDC dengan Piranti Lunak LinuxCNC [19]](https://thumb-ap.123doks.com/thumbv2/123dok/10834940.0/80.892.481.806.387.544/gambar-koneksi-diagram-motor-dengan-piranti-lunak-linuxcnc.webp)
Persamaan energi sisi dingin TEC Panas yang dikeluarkan pompa kalor pada sisi
Jika arah arus DC dibalik maka pemanasan dan pendinginan yang terjadi pun berbeda dan akibatnya suhu pun terbalik maka arah aliran refrigeran juga terbalik. Aliran refrigeran harus mengikuti siklus refrigerasi, sehingga digunakan katup solenoid untuk mengatur arah aliran refrigeran.
Persamaan energi sisi panas TEC Tegangan pada modul TEC dapat dirumuskan
Ketika arus searah diberikan ke modul TEC, satu bed menjadi panas sedangkan bed lainnya menjadi dingin, sehingga terjadi aliran cairan pendingin dari hot bed (desorpsi) ke cold bed (adsorpsi). Siklus refrigerasi adsorpsi dimulai dari desorber menuju kondensor kemudian melewati katup ekspansi, kemudian melalui evaporator dan terakhir menuju adsorber.
Pengaruh kecepatan udara
Dalam tulisan ini, penerapan metode penginderaan gesekan statis pada katup didasarkan pada metode korelasi silang yang dirancang oleh Horch. Gesekan statis pada katup ditandai dengan gesekan statis yang lebih besar dibandingkan gesekan dinamis.
Integral Absolut Kesalahan Pengendali Sebelum mendeteksi keberaan friksi statis katup,
Dalam penelitian yang menjadi acuan artikel ini, pendeteksian osilasi ini menggunakan pengontrol kesalahan integral absolut yang dirumuskan oleh Forsman dan Stattin [6]. Sedangkan integral mutlak error (An dan Bn) diperoleh dengan menghitung integral mutlak sinyal error pengontrol pada interval positif dan negatif dengan rentang persilangan antara nol.
Korelasi Silang
Hasil pada Tabel 5 menunjukkan bahwa hasil deteksi gesekan katup statis dengan metode korelasi silang menghasilkan 10 katup yang terindikasi berosilasi. Penerapan metode korelasi silang untuk deteksi gesekan statis katup dilakukan dengan beberapa data simulasi dan data industri amonia.
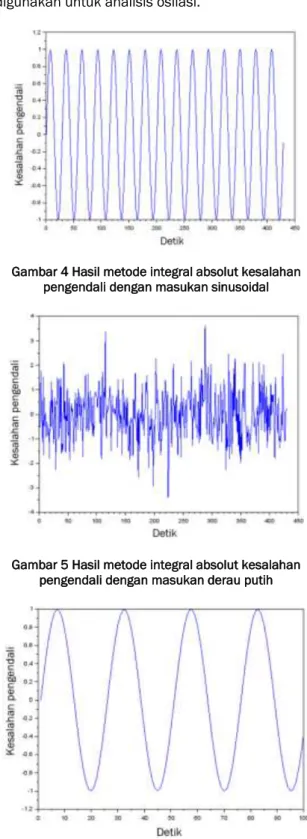
Diagram Blok
Dari fungsi keanggotaan ini kita dapat mengetahui berapa derajat fungsi keanggotaannya. Jika terdapat lebih dari satu kondisi dalam aturan, maka implikasi atau keluaran dari fungsi anggota akan digunakan.
Mekanik Robot
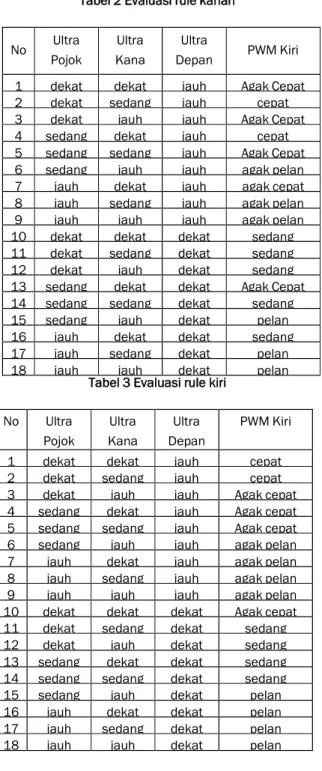
Fuzzy Logic Proses Fuzzifikasi
Depan PWM Kiri 1 sederhana sederhana panjang Kanan Cepat 2 sederhana panjang panjang agak perlahan 3 panjang sederhana jauh agak perlahan 4 panjang panjang panjang agak perlahan 5 sederhana sederhana dekat sederhana 6 sederhana panjang dekat dengan pelan 7 panjang sederhana dekat dengan pelan. Kiri PWM 1 sederhana sederhana panjang Cepat 2 sederhana panjang panjang agak perlahan 3 panjang sederhana panjang agak perlahan 4 panjang panjang panjang agak perlahan 5 sederhana sederhana dekat sederhana 6 sederhana panjang dekat dengan pelan 7 panjang sederhana dekat dengan pelan.
Metode
Polar test menunjukkan RJBA V.2015 mempunyai kestabilan yang baik dan mampu bermanuver dengan baik. Data tekanan yang diperoleh diubah menjadi data kedalaman, yang digunakan untuk menentukan kedalaman yang dilalui oleh RJBA V.2015.
Pengujian
Sedangkan waktu proses tercepat pada sistem ANFIS adalah pada saat learning rate 0,4 yaitu pada saat nilai momentum 0,1.
Pembahasan
Perangkat smartphone yang dilengkapi dengan perangkat NFC dan aplikasi berbasis mobile merupakan solusi terbaik untuk menjadi pembaca kartu RFID portable. Hasil yang diharapkan dari penelitian ini adalah sebuah aplikasi sistem absensi. Penelitian ini merumuskan bagaimana penerapan sistem partisipasi siswa dengan menggunakan kartu RFID dan NFC.
Kebutuhan Fungsional Sistem
Mengumpulkan literatur terkait topik penelitian yang akan dilakukan untuk dijadikan landasan penelitian dan pedoman penelitian. Pada tahap ini dilakukan kajian mengenai kebutuhan yang diharapkan dari sistem absensi siswa berbasis kartu RFID dan perangkat NFC, serta keterbatasan dari sistem yang akan dibangun.
Kebutuhan Non-fungsional sistem Adapun kebutuhan non-fungsional yang
Dengan merancang aplikasi sistem absensi berbasis Android dan mengimplementasikan sistem absensi siswa didalamnya, maka sistem akan diuji berdasarkan kebutuhan fungsionalnya dengan menggunakan metode black box.
Use Case Diagram
Context Diagram
Data Flow Diagram Level 1
Perancangan Arsitektur Aplikasi
Perancangan Antar Muka
144 Halaman kehadiran terdiri dari nama siswa, nama mata kuliah, status kehadiran, dan tombol sentuh.
Perancangan Proses
Implementasi sistem pada aplikasi ini terdiri dari implementasi antarmuka, perangkat keras dan perangkat lunak. Pengguna dapat melihat daftar kursus. Pada bagian program ini, sistem dapat menampilkan daftar lengkap mata kuliah yang dikelola oleh pengguna.
Pengujian Aplikasi
Kemudian respon impuls yang dihasilkan direalisasikan untuk memperoleh estimasi fungsi transfer sistem turbin gas. Tulisan ilmiah ini akan membahas pemodelan turbin gas dengan menggunakan metode analisis korelasi dan algoritma realisasi berdasarkan data input-output pada pengoperasian turbin gas 1.2 PLTGU Grati Pasuruan tipe 701D yang diproduksi oleh Mitsubishi Heavy Industry.
Analisis Korelasi
Data keluaran yang digunakan adalah nilai daya yang dihasilkan turbin gas. Dalam hal ini parameter daya berhubungan dengan nilai torsi dan beban turbin gas. Bagian ini membahas metode identifikasi sistem yang akan digunakan dalam artikel ini, yaitu analisis korelasi dan algoritma realisasi.
Algoritma Realisasi
Data mentah berupa masukan dan keluaran diolah dengan menggunakan metode analisis korelasi untuk memperoleh perkiraan respon impuls. Data masukan dan keluaran yang diambil langsung dari pengukuran di lapangan ditunjukkan pada Gambar 2. a) Data masukan, (b) Data keluaran turbin gas.
Analisis Korelasi pada Turbin Gas Data yang dibutuhkan untuk melakukan analisis
Model Parametrik Turbin Gas dengan Algoritma Realisasi
Validasi Model
Pencarian alternatif dalam pengendalian suatu sistem yang berdimensi besar akan menimbulkan pembagian umum menjadi submasalah. Untuk mengatur hubungan antara masing-masing submasalah, diperlukan koordinasi atau perubahan tertentu dalam penyelesaian submasalah.
Strategi Pengendalian
Karena sulitnya mengendalikan sistem berdimensi besar, akan lebih menguntungkan jika seluruh masalah dibagi menjadi submasalah yang lebih kecil, yang kemudian diselesaikan secara terpisah dan digabungkan kembali solusinya untuk mendapatkan solusi global. Oleh karena itu diperlukan konsep dan teknik untuk merumuskan masalah dan menyelesaikan submasalah sebagai sistem kendali terdistribusi (DCS).
Model Interaksi
Sistem bertingkat merupakan gabungan antara sistem terpusat dan desentralisasi dimana terdapat gain K yang dapat mengatur unsur-unsur dibawahnya. Pada pembangkit listrik PLTU, strategi pengendaliannya menggunakan sistem multi level dimana proses satu dengan proses lainnya saling terhubung dan dapat dimonitor untuk mencapai proses yang diinginkan.
Dekomposisi Berdasarkan Strongly Coupled Sistem (SCS)
Lbila
L L bila
Karena sistem kendali di pabrik atas memiliki matriks interaksi L diagonal yang lebih rendah, sistem tersebut memiliki struktur hierarki. Suatu sistem dikatakan stabil jika dan hanya jika semua nilai eigen sistem terletak pada bagian negatif bidang kompleks.
A BKC
Keandalan Sistem Distribusi Tenaga Listrik Sistem tenaga listrik yang handal dan energi listrik
- SAIFI (System Average Interruption Frequency Index)
SAIFI merupakan rata-rata jumlah kegagalan yang terjadi pada setiap konsumen yang dilayani sistem per satuan waktu dalam satu tahun. SAIDI merupakan nilai rata-rata durasi kegagalan setiap konsumen dalam satu tahun.
Sistem Distribusi pada Pabrik III PT Petrokimia Gresik
Usulan program perbaikan adalah sebagai berikut: Hasil perhitungan indeks keandalan pada Unit Asam Fosfat Pabrik III PT. Petrokimia Gresik dibandingkan dengan standar IEEE, saran yang diberikan adalah sebagai berikut. Sedangkan hasil perhitungan indeks keandalan dibandingkan dengan SPLN 59:1985, sistem distribusi di Pabrik PA Unit III PT Petrokimia Gresik masih dapat diandalkan.


![Gambar 10 struktur dan skema deaerator [2]](https://thumb-ap.123doks.com/thumbv2/123dok/10834940.0/21.892.104.426.388.681/gambar-10-struktur-dan-skema-deaerator-2.webp)