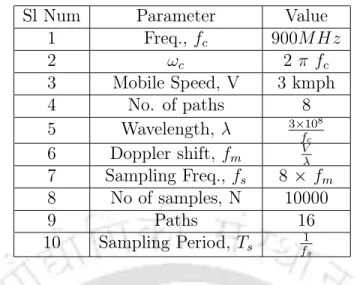
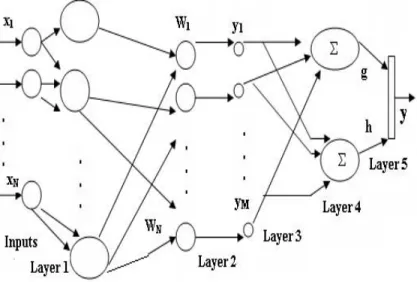
I would also like to express my thanks and gratitude to the members of the doctoral committee for their suggestions and insights. Architectures based on MLP and RNN with filter of length N (for temporal MLP structures) or delay blocks (for RNN-based structures), n number of parallel structures, competitive layer of size l and signal length (P +R) .
Introduction
Background
The pilot-based channel estimation, by requiring additional symbol bits known as pilot carriers to be inserted as a training sequence along with signal symbol blocks, wastes bandwidth. Therefore, alternative methods should be explored to avoid wasting bandwidth when modeling MIMO channels and thereby improve the overall performance of such systems.
Motivation
Therefore, the exploration of the architectural extension of these RNN-based systems for time-varying MIMO channel modeling becomes relevant. All reported works on such soft-computational applications for MIMO channel modeling can be considered as entirely training-learning paradigm-dependent solutions with little or no emphasis on architectural extension of MLP, RNN, and fuzzy-based systems.
Literature Survey
- Application of feedforward ANN and MLP in wireless com- municationmunication
- Application of Recurrent Neural Network (RNN) in wire- less communication
- Application of Fuzzy, Fuzzy-Neural and Neuro-Fuzzy Sys- tems in Wireless Communicationtems in Wireless Communication
A more extensive application of the RNN is observed in the case of a system developed for MIMO channel prediction using a PSO-EA-DEPSO offline training algorithm. Use of fuzzy logic as the core of the reasoning engine to determine different parameters used by the WiMAX system is reported in [49].
Problem Definition
However, the works are mainly limited to the field of training and testing, and these do not provide specific information about the extension of RNNs to composite architectures. Our efforts are mainly focused on architectural challenges, i.e., to explore the full range of capabilities of RNN and use it in combination with Self-Organizing Map (SOM) to model the time-varying characteristics of MIMO wireless channels. .
Main Contribution of the Thesis
The result of MIMO channel modeling using RNN architectures allows for lower computational complexity and higher reliability. These two fuzzy blocks lay the foundation for the FNS used for MIMO channel modeling.
Organization of the Thesis
These attributes of fuzzy-based systems in combination with ANNs are examined and configured for MIMO channel modeling. The result of MIMO channel modeling using RNN architectures allows for lower computational complexity and higher reliability.
Introduction
Characteristics of Wireless Channel
- MIMO channel model
- Performance gains in a MIMO channel
- MIMO channel estimation methods
- Symbol recovery for MIMO channels
As long as the receiver can accurately estimate the modification in the sent signal, it can recover the content of the signal. There are two main types of channel estimation for most of the practical systems - blind and non-blind for MIMO systems.
![Figure 2.1: A generic MIMO scheme used [8] [9]. A generic MIMO system maybe represented as below:](https://thumb-ap.123doks.com/thumbv2/azpdfnet/10344549.0/27.918.146.816.80.684/figure-generic-mimo-scheme-generic-mimo-system-represented.webp)
Soft-Computational Tools
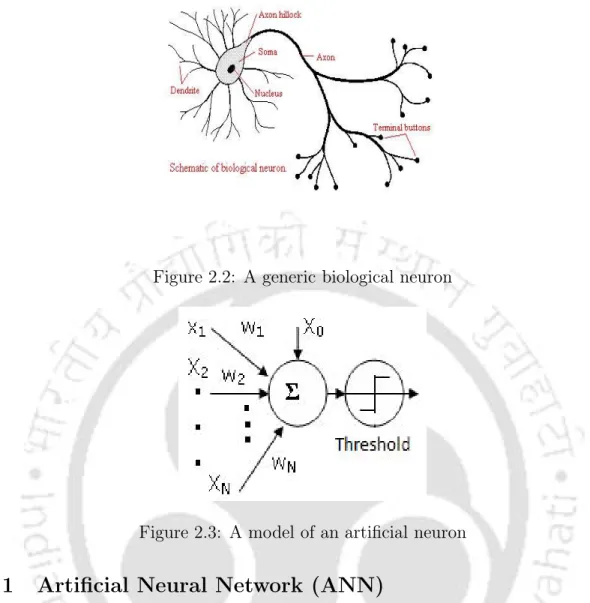
- Artificial Neural Network (ANN)
- Recurrent Neural Network (RNN)
- Self Organizing Map (SOM)
- Fuzzy systems
- Fuzzy neural systems
This algorithm involves a backpropagation of error correction through each neuron in the network. Another possible form of feedback is from the output to the hidden layer and near the input layer from the hidden [34].
Conclusion
For example, fuzzy systems are appropriate if sufficient expert knowledge about the process is available, while ANNs are useful if sufficient process data is available or measurable. ANNs are treated in a numerical quantitative manner, while fuzzy systems are treated in a symbolic qualitative manner.
Introduction
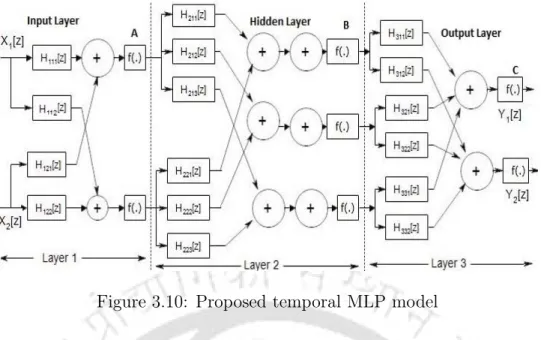
Specifically, two modified architectures of MLP are proposed here that can effectively handle practical time variations of a MIMO channel and can be used for both channel estimation and symbol recovery. In the basic form, the connection weights between the neurons of the MLP are replaced by FIR and IIR links. These links are used in various forms and combinations that facilitate the formation of some MLP structures that demonstrate a better ability to detect time-varying characteristics of signals propagating through a MIMO channel.
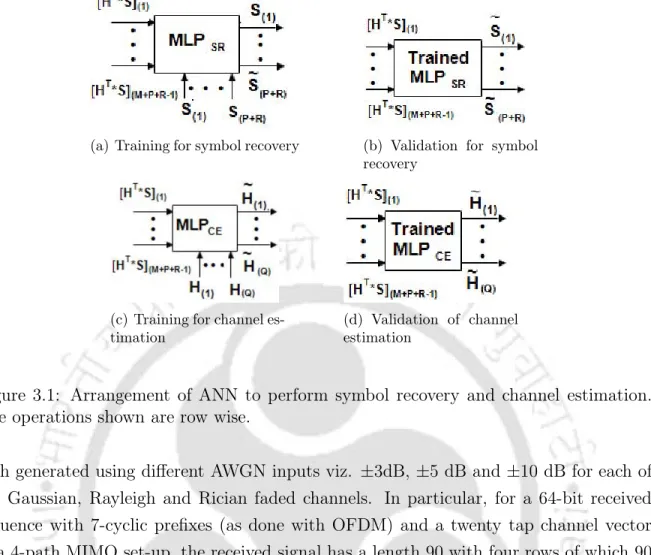
Training, Validation and Testing of ANN
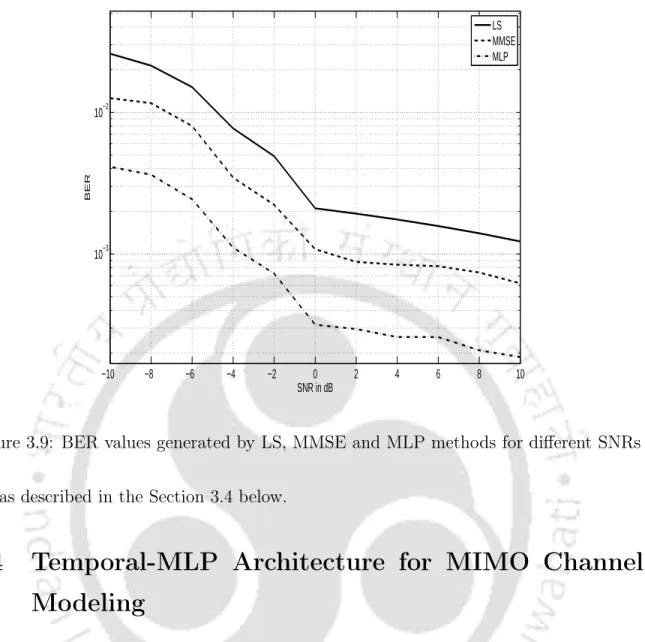
The work is also extended at the end to include OFDM transmissions, as the combination of MIMO-OFDM together provides greater spatial multiplexing gain. In particular, for a 64-bit received sequence with 7-cyclic prefixes (as done with OFDM) and a twenty-tap channel vector in a 4-path MIMO setup, the received signal has a length of 90 with four sequences of which 90 is the number of neurons in the input layer. For the MLP performing channel estimation, the channel vector has a length of 20 of which only four significant coefficients are considered.
Some Results Derived using the Basic ANN Con- figurationfiguration
- Performance of the MIMO channel
- ANN based symbol recovery
- ANN based channel estimation
- Limitation of MLP based symbol recovery and channel es- timationtimation
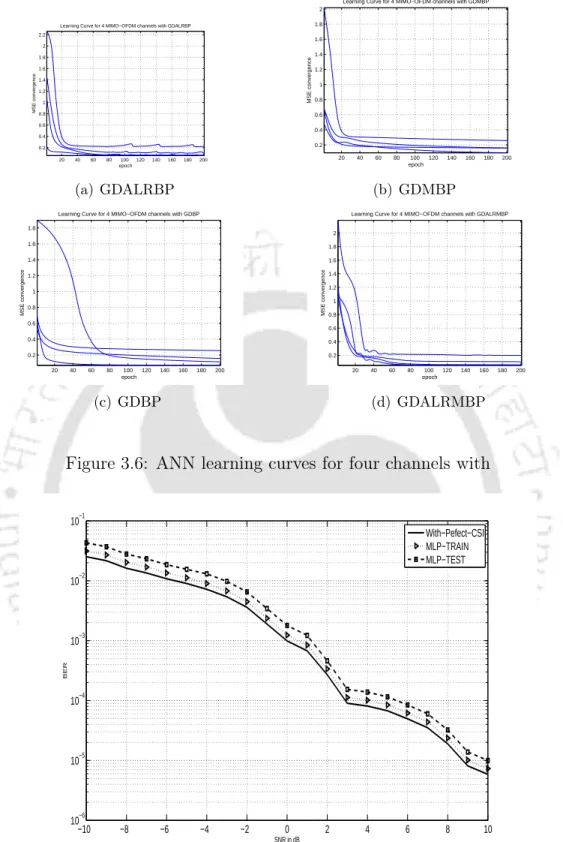
Therefore, the size of the hidden layer of the considered ANNs is 1.5 times the size of the input layer. The training of ANN for MIMO channel modeling considers four ANN training methods to determine the best configuration for testing. At the end of the validation phase, the ANNs are ready to perform both symbol recovery and channel estimation together.
Temporal-MLP Architecture for MIMO Channel Modeling
- FIR-MLP architecture
- IIR-MLP architecture
- Gradient computation for the temporal architectures
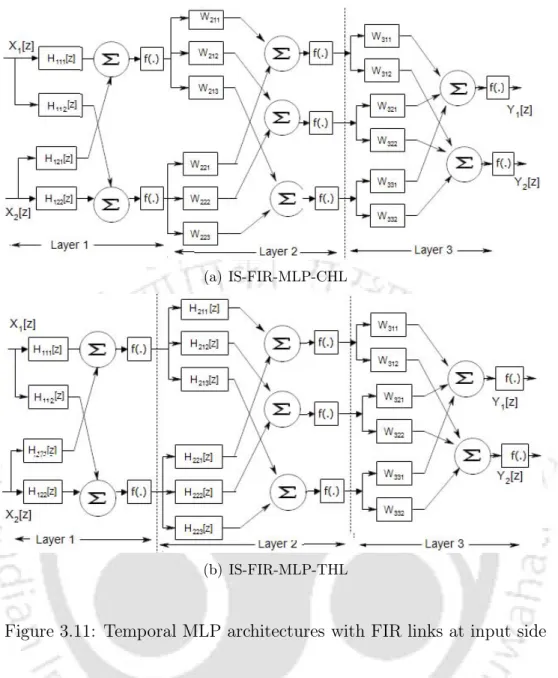
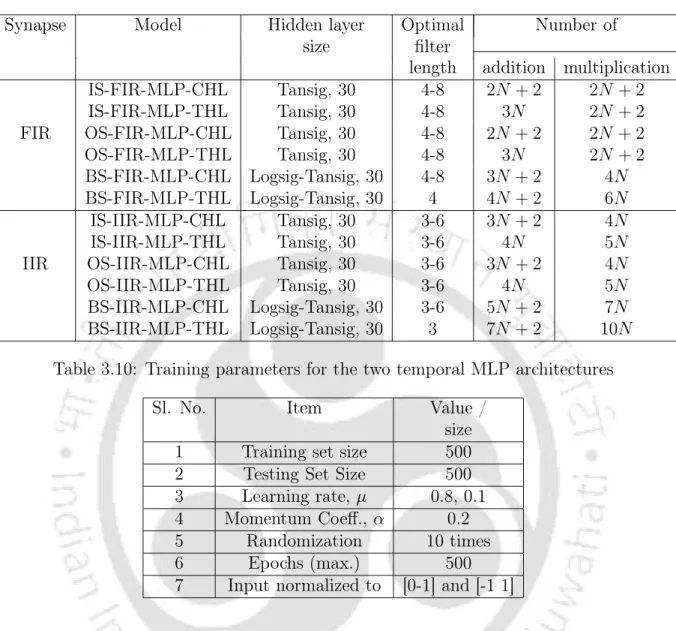
The temporal attributes of the FIR-MLP setup are derived by incorporating FIR synapses in the input, output and hidden layers. IS-FIR-MLP-CHL: In this form, the temporal MLP is constructed by placing only FIR synapses in the input side. BS-FIR-MLP-CHL: In the configuration on both sides, the FIR synapses are located in the input and output layers.
Results and Discussion
It shows the performance of temporal MLP compared to conventional MLP in solving time-varying MIMO channels. In addition, temporal MLP provides better generalization capability than conventional MLP, which is required for modeling time-varying MIMO channels. Temporal MLP structures show an improvement of 1.4-6.3% over conventional MLP, indicating better learning.
Conclusion
The obtained results show consistent improvement with temporal-MLP-based modeling of time-varying MIMO channels applied for VOIP transmission under severe fading and presence of CCI. Furthermore, from the Table 3.13 it is seen that the IIR-MLP structures show improved performance in fewer iterations (Table 3.11) despite a marginal increase in computational complexity (Table 3.9) and are therefore better suited for the purpose than the FIR- MLP Structures . The temporal-MLP architectures provide a better learning ability to discriminate between time-varying samples.
Introduction
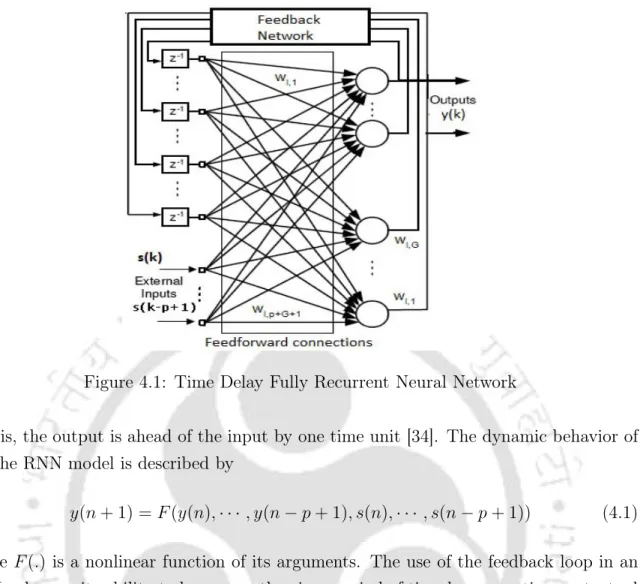
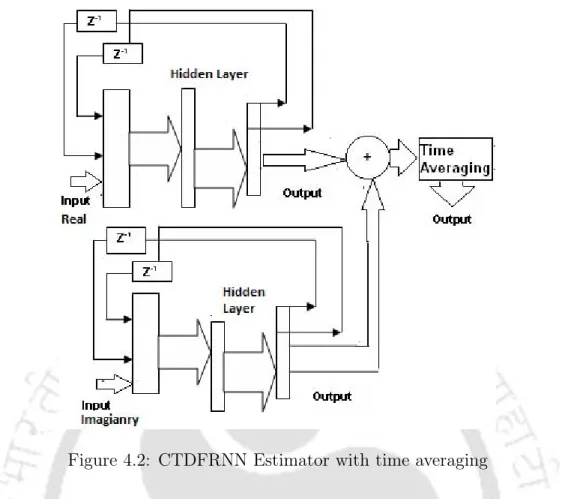
In particular, several RNN architectures are explored to formulate a suitable mechanism for estimating MIMO channels with time-dependent characteristics. In the most rudimentary form, the RNN can be modeled to use split in-phase and quadrature components for training with delayed input and feedback loops.
Configuring the RNN for MIMO Channel Model- inging
In addition, the RNN architecture associates the current and past context and transitions between layers using a state vector to describe the future response of the system, thereby dynamically learning the temporal behavior of input patterns [ 34 ]. Exploring RNNs in the form of CTDRNNs configured in a cluster provides an additional opportunity to improve results and provides certain diversity gains. An RNN in the form of a CTDRNN is also arranged to form a MNSOM, which provides another direction to improve the performance of the system.
MIMO Channel Modeling with RNN and SOM
- CTDFRNN with SOM optimization
- CTDFRNN-Cluster (CTDFRNN-C) optimized by SOM
- CTDFRNN - Modular Network SOM (CTDFRNN-MNSOM)
This is done due to the fact that SOM is fast and it guarantees. The process of optimizing the channel coefficients from a matrix block (Qnumbers of coefficients generated in n different training slots) to the most appropriate vector form (in this case) is depicted in Figure 4.4. In this case, a CTDFRNN is considered to be the processing module of the MNSOM (Figure 4.7).
Results and Discussion
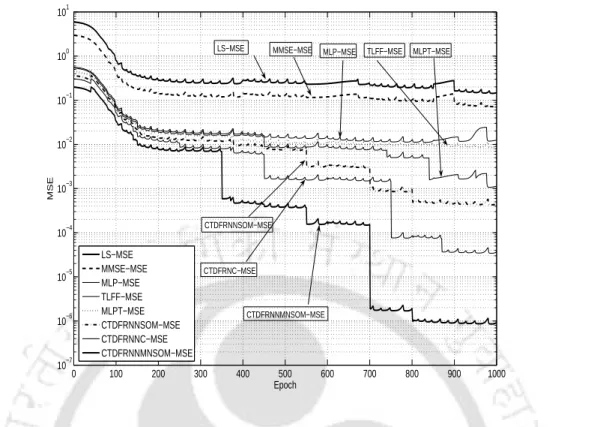
The results are slightly lower compared to the performance shown by CTDFRNN-SOM, which is mainly due to the presence of the SOM block. Some of the results derived are shown in Figure 4.9, which shows performance comparisons of some MIMO setups. The results generated for the Nakagami channel are also the same and demonstrate the effectiveness of RNN architectures configured to model MIMO channels.
Conclusion
However, as shown in Figure 4.11, the time complexity of CTDFRNN-MNSOM is about 23% less than that of CTDFRNN-SOM. This table depicts that the accuracy of CTDFRNN-MNSOM is at least 23.1% better than the baseline CTRFRNN-SOM. It should also be noted from Table 4.4 that CTDFRNN-MNSOM has less time complexity than FIR-MLP or IIR-MLP.
Introduction
For its inherent ability to derive expert-level knowledge and decision-making, fuzzy-based systems have already been used in wireless communication in areas such as leveling, etc. All these works emphasize applications of fuzzy-based systems for wireless communication areas with almost no emphasis on architectural challenges and benefits that can be obtained by using such systems with modifications. In this chapter, we propose the formulation of certain fuzzy-based systems using TD-FRNN with the ability to handle time-varying inputs in fuzzified form to meet the above two challenges while time-varying MIMO- channels are modelled.
MIMO Channel Estimation using Fuzzy Based Sys- temstems
- Fuzzy-MIMO channel estimation: Neuro-Fuzzy or Fuzzy Neural?Neural?
- FNS MIMO channel estimation
- Experimental considerations
- Inference rule set
- Defuzzification
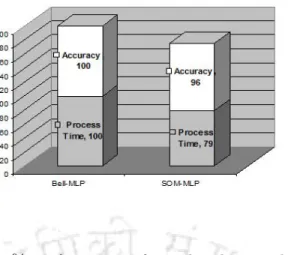
The second method is to use a SUM to create clusters for each of the samples that make up the input matrix. Let xT be the input to the MLP (Figure 5.3) while yEM G is the expected range of membership numbers given by the bell-shaped function. In the case of the SOM-MLP approach, the membership figures are generated as:. where Wj is the random weights of the competitive layer of the SOM.

Results and Discussion
- Performance of the two membership generation approaches
- Performance of the FMLP and FTDFRNN approaches of fuzzy inferencefuzzy inference
- Performance of fuzzy-based MIMO channel modeling
The performance of the system depends on the set of inference rules adopted to run the estimation process. The implementation of the inference engine using six sets of rules shows a dependency on the network structure adopted for this purpose. But this increase in processing time and reduction in MSE values result in an accuracy improvement of marginally between 1 and 1.5%.
FTDFRNN based NFS for MIMO Channel Mod- elingeling
The training of the ANFIS system is performed in two phases: first a forward pass and then a backward cycle during which the weights and other network parameters are updated. A set of experiments is also conducted to see the effectiveness of the fuzzy MIMO estimator in NFS and FNS forms. The MSE convergence of the NFS model improves with noise corrupted ('-3dB) data, but precision suffers when the same block is tested with samples filled with severe disturbance ('-10dB).
Conclusion
The results clearly show that the FNS design is better and is more preferable for adaptive receiver designs. Experimental results show that the FNS approach is more suitable than the NFS method for MIMO channel modeling. FNS is at least 9% faster, needs about 23% fewer training sessions, and shows 1.2% higher accuracy in symbol recovery than NFS.
Conclusion
Summary of the Present Work
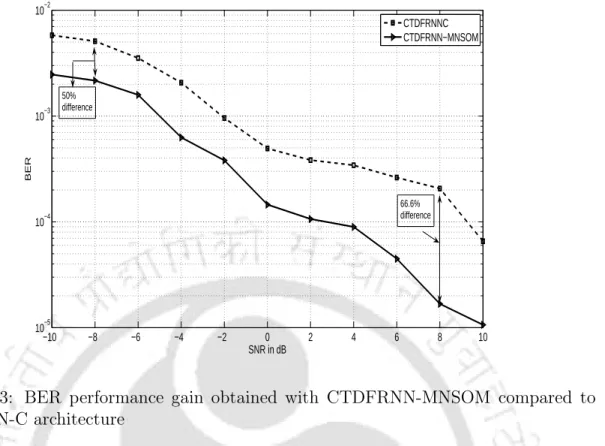
We deal with RNN-based approaches, which is a natural alternative choice to temporal MLP due to the fact that these soft computational tools have the built-in ability to deal with time-varying signals. Experimental results show that CTDFRNN-MNSOM turns out to be a viable alternative to conventional stochastic estimation methods with an average processing time saving of 60%. In some very faint channels configured for VOIP-based transmission, for an average increase of 0.9% in performance accuracy provided by CTDFRNN-MNSOM compared to CTDFRNN-C, the BER values show a decrease of 50-66% .
Scope of Future Work
Haykin: "Kalman Filter-opgeleide Herhalende Neurale Equalizers vir Tyd-varierende Kanale", IEEE Transactions on Communications, vol.53, pp. Yeap: "Decision Feedback Recurrent Neural Equalization with Fast Convergence Rate", IEEE Transactions on Neural Networks, vol. 16, pp. Sugeno: “Fuzzy Identification of Systems and its Application to Modeling and Control”, IEEE Transaction of Systematics, Man and Cybernetics, vol.SMC - 15, pp.