Development of a semi-automated rapid whole-body assessment model using an open pose and a single working image. Submitted at the University of Ulsan Graduate School in partial fulfillment of degree requirements. The aim of this study was to develop a semi-automatic Rapid Whole Body Assessment (REBA) model, which is one of the representative ergonomic risk assessment methods.
This study adopted the Tensorflow implementation of Open Pose that can detect three-dimensional locations for 17 key points of the human body using a single image. Key words: Work-related musculoskeletal disorders, Rapid whole body assessment, Open pose, key point, single image, occupational safety and health.
INTRODUCTION
- Problem Statement
- Research motivation and objectives
- Significance of the study
- Organization of the thesis
Since REBA seeks to evaluate both results that can be identified from an image and results that cannot be identified from an image, the system developed a semi-automatic basis. Finally, the system is sensitive to the assessment of musculoskeletal risks in a variety of work positions found in healthcare, manufacturing, service industries, etc. Therefore, the system can efficiently help not only occupational safety and health practitioners, but also manufacturing and service industry practitioners. .

LITERATURE REVIEW
Work-related musculoskeletal disorders
Psychosocial risk factors leading to work-related MSDs include stressful employment, social pressure at work, and job dissatisfaction. Work-related MSDs can result in pain, slowed reactions, increased risk of injury, lower quality of life, and reduced work capacity. Thus, both individuals and organizations must realize that they are constantly at risk and must receive ergonomic training that they can apply at every stage of their lives to avoid work-related MSDs.
Ergonomic Risk Assessment tools
- Rapid Entire Body Assessment (REBA)
- Rapid Upper Limb Assessment (RULA)
- Ovako Working Posture Analyzing System (OWAS)
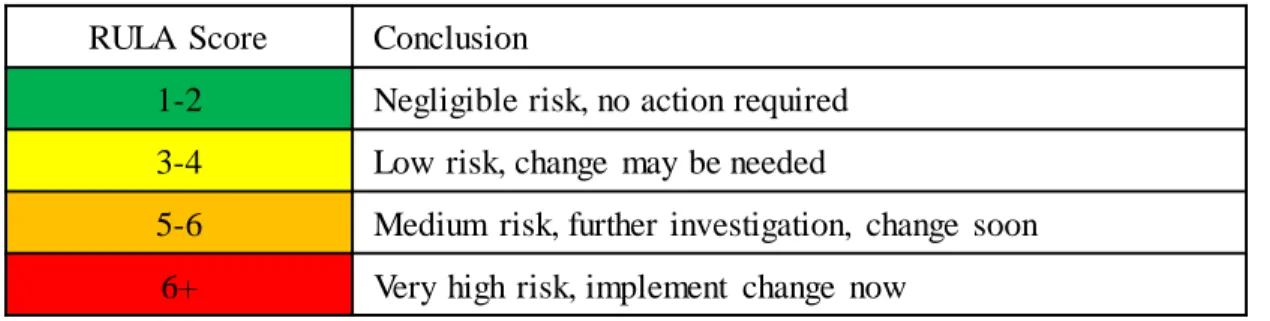
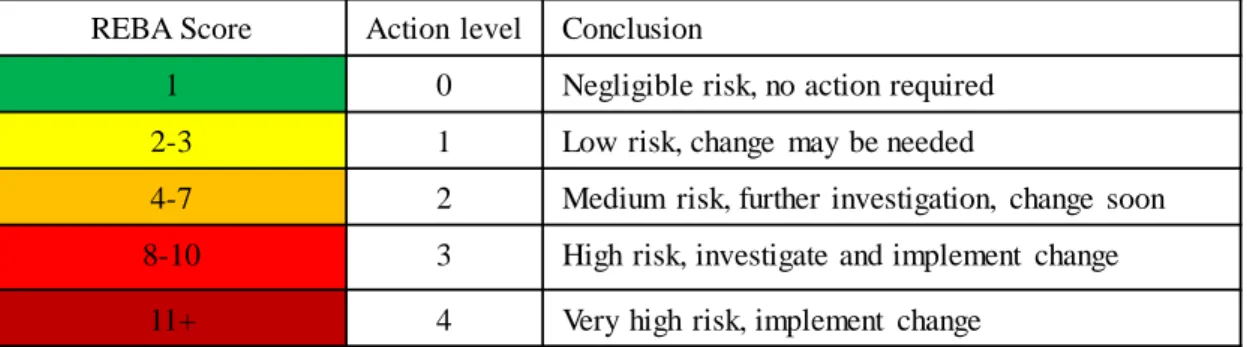
The level of action and associated risk level category can be inferred based on the REBA score. Although REBA is one of the most widely used and reliable ergonomic risk assessment tools, it also has some limitations. It also requires the use of a representative worst case posture at a point in time and a separate assessment of the right and left sides of the body.
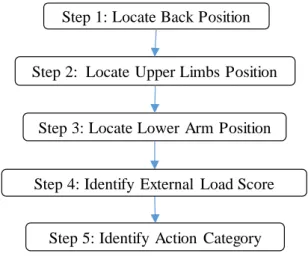
The tool does not require any special equipment to quickly assess the disturbances of the neck, trunk and upper limb postures, as well as muscle function and external loads experienced by the body. Those trained to use the tool do not need previous observational technical skills, and this will be an advantage of the tool. Score A is equal to the sum of muscle use score, strength score and posture score A determined based on upper arm position score and wrist score.
Subsequently, posture score B should be determined on the basis of the neck score, trunk score and leg score. The most common 4 worker postures, 3 upper limb postures, 7 lower limb postures and the weight of the load carried are all identified by the OWAS in 4. Observation of work tasks, codification of body postures, assignment of risk categories and offering of corrective action actions were all part of the OWAS assessment methodology.
After tracking each of the position scores, the results must be reclassified into four classes.
Open Pose
- Basic concepts of 2D pose estimation
- Overall pipeline of Open Pose method
- Network architecture
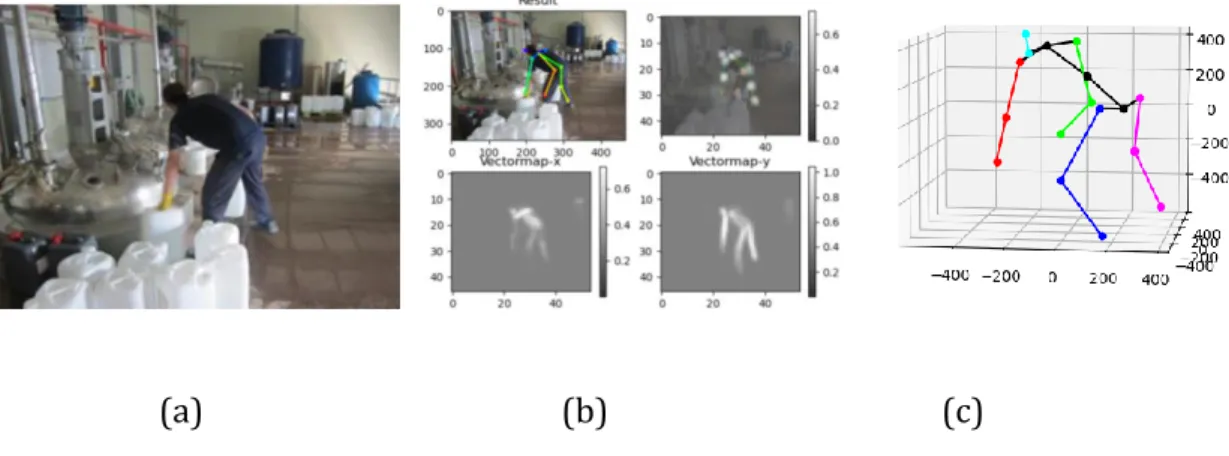
Second, the upper branch (beige) predicts the body parts using confidence maps (Figure 2.5b) of various body parts, such as the right eye, left eye, right elbow and others. The part affinity fields (Figure 2.5c) are predicted by the lower branch, which reflects the degree of association between distinct body parts in the input image. In the next step, to extract the postures for each individual in the image, the confidence maps and partial affinity fields obtained earlier are processed using a greedy pairwise matching.
In the final step, the Open Pose system displays the 2D locations of anatomical key points for all people in the image, as shown in (Figure 2.5e). The Affinity part is a collection of two-dimensional vector fields that encode the location and orientation of the limbs of the various people in the image. By tripling the number of nonlinear layers in the architecture of this method, the accuracy and speed of operation have been improved compared to previous position estimation models.
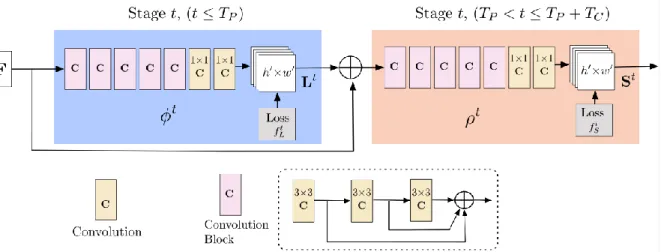
Refine the partial affinity fields Lt of the feature maps of the basic network F in the first set of phases. Affinity fields representing part-to-part association, illustrated in blue, and detection confidence maps, shown in beige, are repeatedly predicted by the Open Pose network architecture (Figure 2.6). The affinity fields from the output portion of the previous layers are used in the second set of stages to refine the confidence map prediction.
The loss between the predicted partial confidence maps and partial affinity fields and the truth maps and fields is calculated using the L2 loss function.
PROPOSED SYSTEM DESIGN
Key (joint) point detection using Open Pose
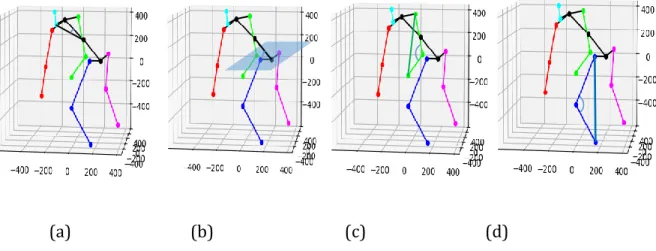
To calculate the neck angle, the center of the eye, the center of the shoulders and the center of the torso are primarily used (Figure 3.3a). The same technique can be applied to both the right and left sides of the body (Figure 3.3c). Finally, hip, knee and ankle joint points were used to determine leg angle for both sides of the body (Figure 3.3d).
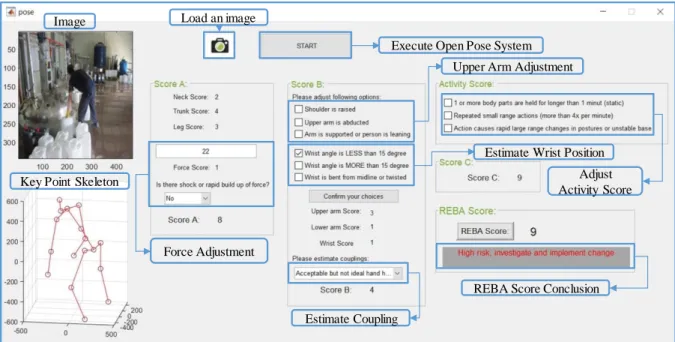
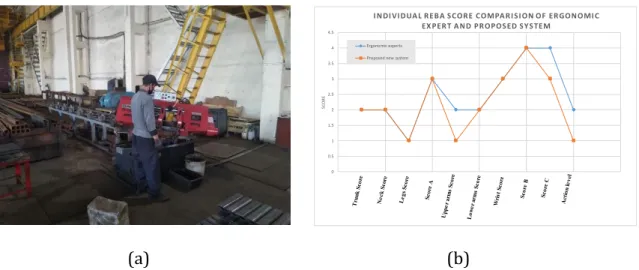
The proposed system software was coded with Matlab R2019b (Mathworks, Inc., USA) to calculate the REBA score and draw conclusions based on the score. The graphical user interface of the software consists of five panels: 1) Score A 2) Score B 3) Activity Score 4) Score C and 5) REBA Score, as shown in Figure 3-3. On the other hand, the individual REBA scores and action level of the proposed system were quite similar to expert results. In the case of the first image (Figure 4.2a), the proposed system and the ergonomic expert are almost the same results except for the upper arm score, Score C and Action Level.
The second image (Figure 4.3) of the evaluation results shows that the new system overestimated the results for the torso and legs by 1 point. In the case of the third image (Figure 4.4), the proposed system shows relatively more differences with the results of the expert. Finally, in the case of the last figure (Figure 4.6), the proposed system shows relatively worthy results compared to the previous cases.
In general, the assessment results show that the proposed system shows reasonable REBA scores and the values of action level.
Joint angle calculation
Development of graphic user interface
To improve the evaluation accuracy and reliability of the proposed system in this section, we decided to compare trained participants (n=163), ergonomic experts and new system REBA score results for the whole body. Assessment was performed using the same dynamic posture image (Figure 4.1a), found in the manufacturing industry by participants, ergonomic experts and proposed new system. The proposed system omitted only 1 point for the torso, upper arm and forearm scores.
Although the C-score was the same for ergonomics experts and the proposed system (C-score = 10), participants underestimated it (C-score = 8). Five male workers (average age and range 31.5 years and 25-40 years respectively) voluntarily participated in the evaluation of the proposed system. Similar risk estimates were observed in the upper arm, lower arm, and wrist; however, the proposed system was overestimated for the torso, neck, and legs.
The proposed system uses the Open Pose model to detect human pose with 17 three-dimensional body key points. First, the Benchmark example was compared with trained participants (n=163), ergonomic experts and the proposed system's performance. In the case of Figure 4.6, the maximum score difference was 3 in score A and score C; only the leg score, upper arm score, and wrist score were matched with expert scores.
Considering the evaluation results, the proposed semi-automatic REBA system implies a promising ergonomic risk assessment system using a single image.
EVALUATION OF THE DEVELOPED SYSTEM
One golden example
Outcome scores for ergonomic experts and participants were adapted from previous studies (Woohyun Chon, Kihyo Jung. "Analysis of accuracy and reliability for OWAS, RULA, and REBA to assess the risk factor of work-related musculoskeletal disorders"). Overall, there was no significant difference between the individual scores and action level of the expert and the new system, but there is a significant difference between the experts' scores and the average scores of the participants' scores.
General working images
It can be clearly seen that the participants underestimated the scores for almost all body parts except legs and wrist. On the other hand, the system underestimated or omitted scores for Upper Arms and Score B. Despite those differences, the action level was the same level (2-level) and the risk was medium.
The ergonomics expert results and the system results were absolutely the same for each individual REBA score and action level. The reason for this was the perfectly chosen shooting angle, so that all body parts can be clearly seen in the picture. The system was overestimated with extra scores for almost all body parts except the legs, upper arm and wrist.
Even 2 points of difference in torso, grade A, grade C, and 1 point of difference in neck, lower arm, grade B, as well as the degree of action can be seen.
DISCUSSION
A new semi-automatic Rapid Entire Body Assessment system has been developed to avoid minor errors caused by the human factor while assessing ergonomic risks and to make the REBA procedure even simpler than the traditional method. Two evaluation experiments were conducted to assess the performance of the new REBA score assessment system. This evaluation result showed that the expert and the new system's individual scores and the action level were quite similar (difference was 0 to 1 point), but the experts' results and average scores of participants' results showed apparent difference of 0 to 2 points . .
Second, 5 different images were taken at the workplace and based on this image, ergonomic experts located individual REBA scores and action levels. In this evaluation experiment, the system worked properly and showed very good results under certain conditions. For horizontal images where all parts of the body are visible, the system evaluated individual REBA scores and action levels almost identically to expert results.
However, in the case of vertical images or images with missing or overlapping body parts (eg legs, hands, head), the system performed relatively worse. Only a few example images with similar poses and similar REBA scores were used in the evaluation of the system. Evaluation of more sample images with different poses and workload/weight is therefore necessary to test the performance of the system.
CONCLUSION