Figure 4.10: The number of nodes moved during the restore, as a function of N inches. The number of messages exchanged by all nodes during the restore. 76 Figure 4.13: Impact of choosing an actor of the least degree as backup on the inter-actor. connectivity and coverage a) critical b) non-critical.
I NTRODUCTION OF WSAN S
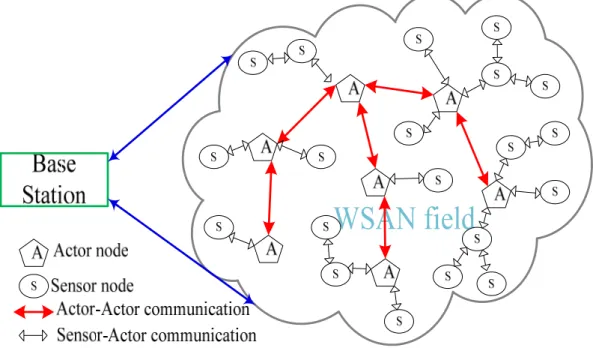
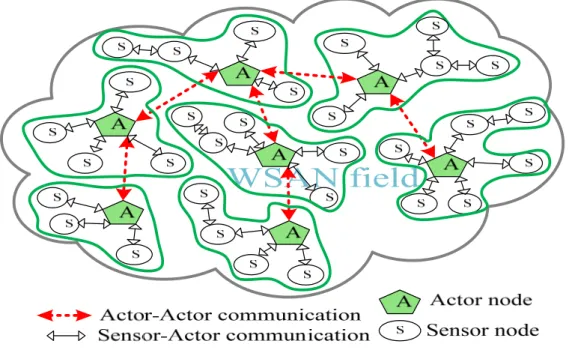
The sensor nodes survey their environment, measure environmental conditions, and transmit the collected data to one or more actors via single-hop or multi-hop communication (Ramanathan and Rosales-Hain 2000) which requires connectivity between sensor and actor (Akyildiz and Kasimoglu 2004; Sensor nodes are low-cost, multi-purpose, low-power devices that interact with the environment to sense certain physical phenomena such as pressure, temperature, humidity, light, etc. and communicate them to actors in the environment.
A PPLICATIONS OF WSAN S
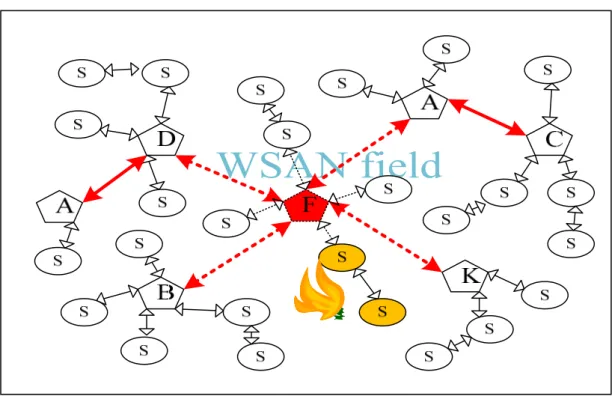
Since most applications of WSANs are critical in nature, the role of an actor is extremely important for a timely response to events such as fire, earthquakes, disasters, hurricanes, etc. Actors such as firefighting robots and flying aircraft must be engaged as soon as possible to control the fire that has broken out and prevent its spread.
M AINTAINING I NTER - ACTOR C ONNECTIVITY AND C OVERAGE IN WSAN S
In most WSAN applications, actors must cooperate and coordinate with each other in order to plan an optimal response and synchronize their operations. For example, in forest monitoring applications, actors such as fire trucks and flying aircraft should be able to timely detect the presence of a fire that has broken out nearby and take appropriate fire prevention measures.
P ARTITIONED WSAN S
The impact of actor error in WSAN is much higher compared to sensors in WSN. The impact of an actor's error can be so great that the network can become non-functional.
M OTIVATION
A IM AND O BJECTIVES
S COPE AND LIMITATIONS OF R ESEARCH
T HESIS C ONTRIBUTIONS
We analyze the convergence of the proposed algorithm, prove its correctness and confirm its efficiency. Furthermore, a variant of the proposed algorithm is also presented and validated through simulations in the same chapter.
T HESIS O RGANIZATION
RELATED WORK
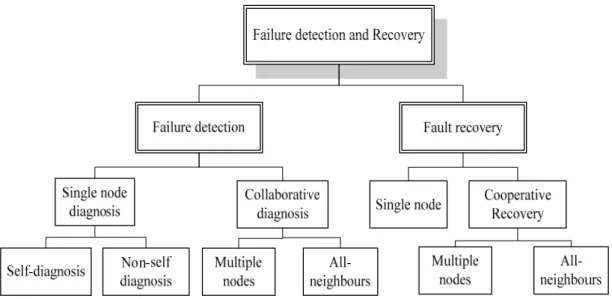
- F AULT TOLERANCE AND C ONNECTIVITY RESTORATION
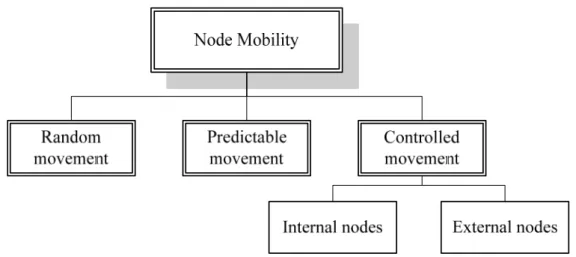
- N ODE M OBILITY
- Controlled and Coordinated Multi-actor relocation
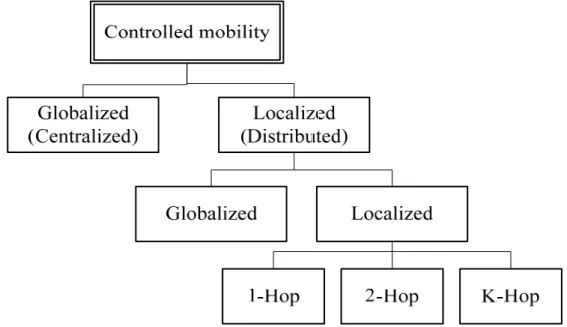
- Globalized and Localized algorithms
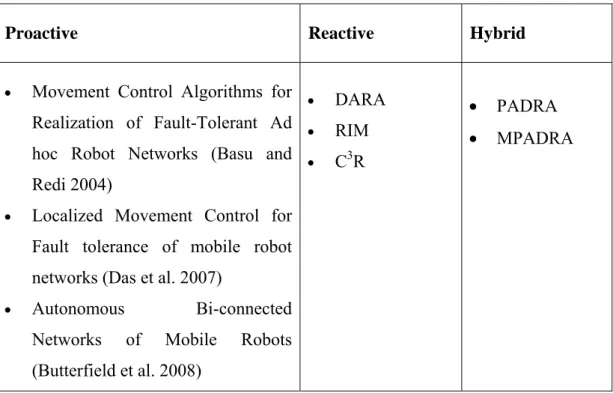
- Proactive, Reactive and Hybrid algorithms
- O PTIMIZATION OBJECTIVE
- Coverage and Connectivity in wireless sensor and actor networks
- Handling multiple simultaneous failures
- Application-centric connectivity restoration
- C HAPTER S UMMARY
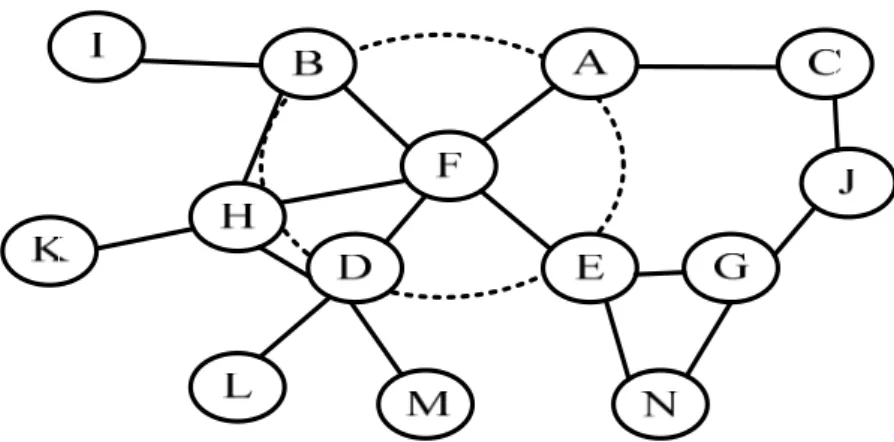
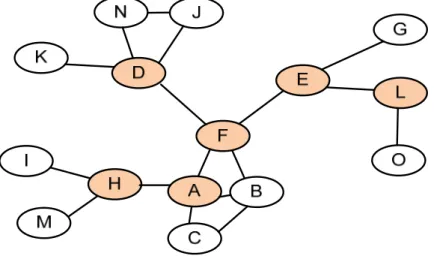
For example, approaches such as PADRA (Akkaya et al. 2008) involve one of the neighbors detecting a fault. PADRA (Akkaya et al. 2008) identifies the connected dominant set (CDS) of the entire network to detect cut vertices.
VOLUNTEER-INSTIGATED CONNECTIVITY
S YSTEM MODEL AND ASSUMPTIONS
Sensing range refers to the area where sensors can sense and is assumed to be symmetrical for all sensors. However, such movements are assumed to be more expensive than message transmission (Wang et al. 2005a). The communication range (rc) of an actor refers to the maximum Euclidean distance that its radio can reach and is assumed to be greater than that of sensors.
An actor's range of action refers to the maximum area that an actor can cover (Batalin and Sukhatme 2005) and is assumed to be the same for all actors. A player is considered to have failed if their heartbeat messages are not received consecutively.
D ESIGN OF V OLUNTEER - INSTIGATED C ONNECTIVITY R ESTORATION ALGORITHM
- Application scenario and problem definition
- VCR overview
- Detailed VCR algorithm
- Pseudo code and illustrative example
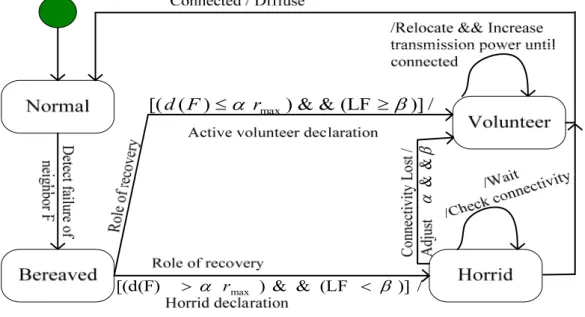
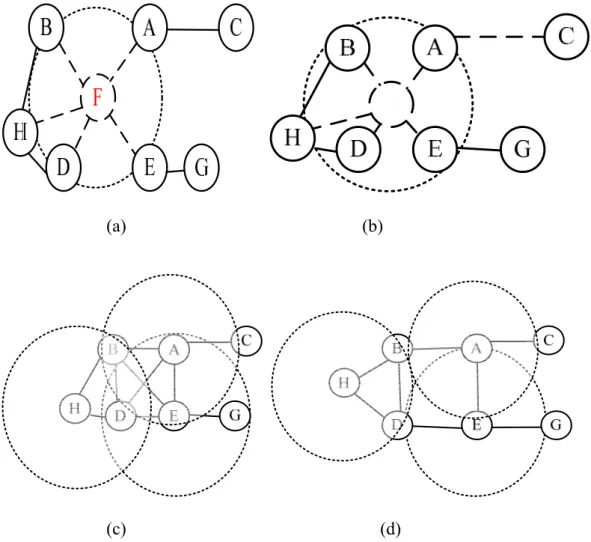
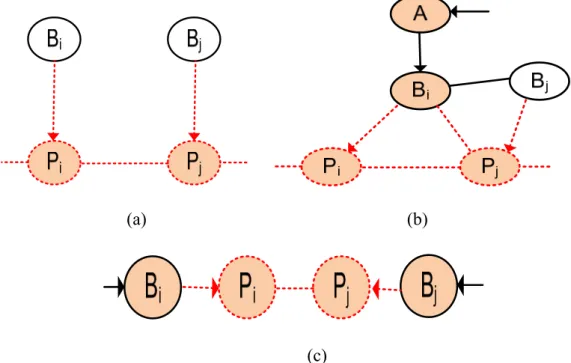
These dead actors (BAs) examine their proximity to F and the partially used transmission range to decide whether to participate in the recovery process or not. In the second phase, topology repair is performed through uncoordinated relocation of volunteer actors by exploiting the partially utilized transmission range and actor diffusion. Thus, nodes whose range is only partially used should be favored in the recovery process.
However, the value of γ would be further reduced if the volunteer actors perceived a high dose of interference in the environment of F, essentially requiring V and other volunteers to move closer to F to reach each other. In the volunteer state, the actor performs relocation along with increasing transmission power until it either connects with other volunteers or becomes a distance of γ.
P ERFORMANCE EVALUATION
- Network operation model
- Simulation environment
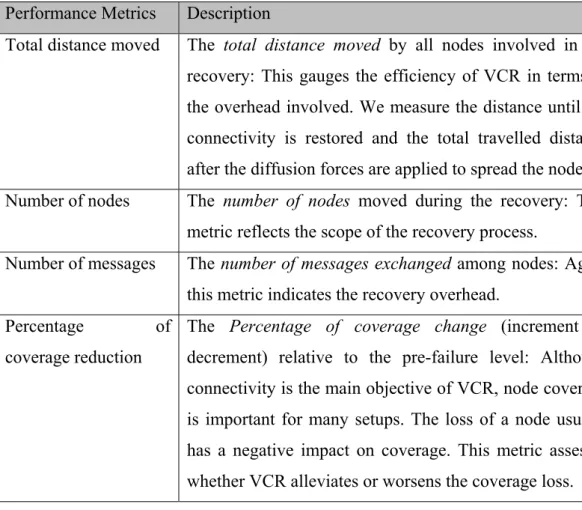
- Performance metrics
- Baseline approaches
- Results and analysis
Total distance traveled The total distance traveled by all nodes involved in the recovery: This measures the efficiency of VCR in terms of the overhead involved. The number of deployed nodes (N) in the network affects the node density and the inter-actor connectivity. Both DARA and RIM are distributed algorithms and are similar to VCR in that both nodes exploit relocation to restore connectivity.
In terms of restoring the connectivity, VCR significantly outperforms both DARA and RIM because it only moves nodes in the close vicinity of F. As both graphs in the figure indicate, the performance advantage of VCR remains consistent even with higher node density and transmission range.
C HAPTER S UMMARY
PARTITIONING DETECTION AND CONNECTIVITY
O VERVIEW OF PARTITIONING DETECTION AND CONNECTIVITY RESTORATION
Upon failure detection, the backup actor initiates a recovery process that may involve coordinated relocation of several actors. This chapter also presents DCR; a distributed hybrid partition detection and connection recovery algorithm that improves the backup criteria for PCR. Simulation results validate the performance of PCR and DCR that are efficient and effective compared to state-of-the-art schemes found in the literature.
Both PCR and DCR assume failure of one critical actor at a time and no other node fails during the recovery process. The designated backups detect the failure of the primary(s) and simultaneously perform the recovery process.
R ECOVERY FROM SINGLE CRITICAL ACTOR FAILURE
- Design of partitioning detection and connectivity restoration algorithm 58
- Design of Partitioning Detection and Connectivity Restoration (DCR)
- Performance evaluation
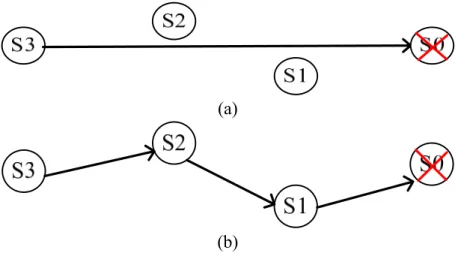
The reactive recovery process is initiated by the backup as soon as a failure is detected in the primary backup. The scope of the recovery depends on the position of the backup actor. This could be one of three scenarios. The backup actor moves to the location of the failed primary and exchanges heartbeat messages with its new neighbors.
Cascading move: As mentioned earlier, the location of the backup determines the scope of the restore. The node communication area (r) affects the network connectivity and greatly affects the recovery cost in terms of the distance traveled and the number of actors involved.
R ECOVERY FROM FAILURE OF MULTIPLE ACTORS
- Application scenario and problem definition
- RAM overview
- RAM analysis
- RAM pseudo code
- Performance evaluation
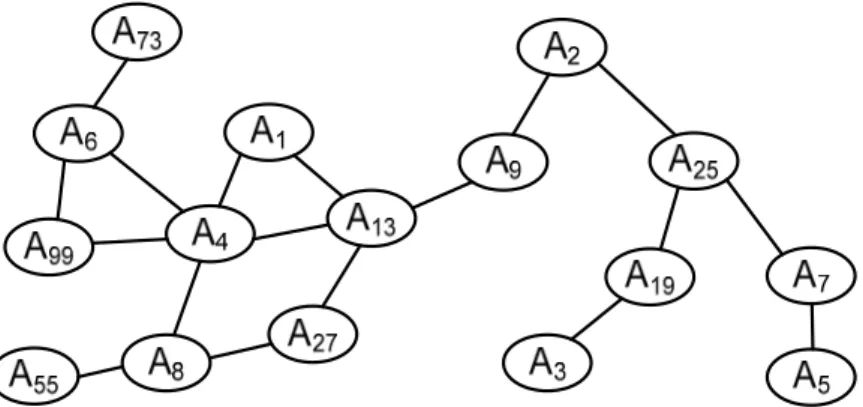
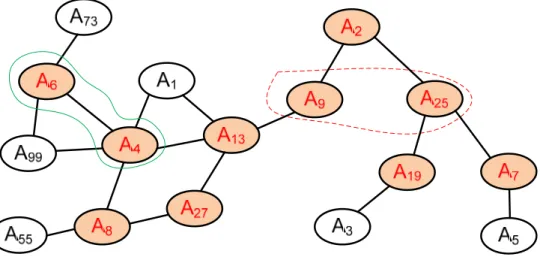
In the event of failure of adjacent critical actors, the designated backup coordinates recovery. A3 detects failure of non-critical primary A4 and detects that A5 (large primary) has also failed. A3 ignores the failure of A4 (as it is non-critical) and moves to the position of A5 as shown in Figure 4.23(b).
If the backup node B also detects the failure of its large primary G (i.e., the primary of the primary), B executes the FailureRecovery() recovery procedure to recover from the large primary G, as mentioned in Figure 4.22 earlier (lines 14 -16). Num func mor send me because of m me's. mber of me ction of the re-message ds extra re ssaging ove. use network more non-c ssages. messages without network overhead. ecovery co erhead redurk connectiv critical nod 6: The total a fu. hung up: Fi ze and radio d dan RAM coordination meets TV improvs that do. the higher ves in both c. for obvious reasons Both the density and the cases. messages about RAM.
C
As stated in Section 2.2.3, most existing mobility control link restoration approaches do not consider application-level constraints on actor mobility during recovery from a node failure. The main idea is to identify the critical nodes and assign the appropriate spare to them, preferably among the non-critical nodes. A backup is selected among 1-hop neighbors that cause minimal disruption to the application and have the least impact on coverage and connectivity.
Each pre-assigned backup starts by monitoring the primary backup and then initiates a recovery process once the primary backup's failure is detected.
S YSTEM MODEL , APPLICATION SCENARIO AND PROBLEM DEFINITION
Moving an incompetent actor or an actor performing a critical task to replace a failed one can result in a higher failure rate at the application level. In addition, the criticality of applications and the resource-constrained nature of networks require an application-centric recovery scheme with low recovery time and reduced overhead. The capabilities of an actor and its current task can determine the importance of an actor in terms of usage and coverage.
The AC value defines the application aspect, i.e., what an actor is expected to do. Additionally, each actor will maintain the TCI that refers to the priority of the current task being executed by the actor.
D ESIGN OF APPLICATION - CENTRIC CONNECTIVITY RESTORATION ALGORITHM 109
- Backup selection
- Primary monitoring and failure detection
- Failure recovery
- ACR algorithm analysis
- Pseudo code of ACR algorithm
2010c), ACR prefers to select as a backup a non-critical node among the 1-hop neighbors with a similar AC and the least TCI. Third, if the backup is non-critical, it simply replaces the primary and the recovery is complete as shown in Figure 5.7. ACR only introduces a new intersection due to recovery when an intermediate non-critical backup node replaces the primary.
If there is a non-critical actor near F, a suitable actor with a comparable AC is searched for. On the other hand, if no non-critical actor among F's neighbors is available, F searches for the best candidate among the critical nodes based on the same criteria specified earlier (lines 47-49).
P ERFORMANCE EVALUATION
- Simulation setup and performance metrics
- Baseline approaches
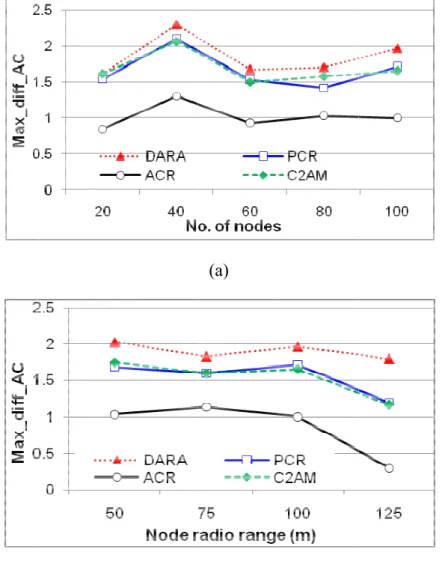
- Results and analysis
Proceedings of the 2009 International Conference on Wireless Communications and Mobile Computing: Connecting the World Wirelessly. Proceedings of the 10th ACM Symposium on Modeling, Analysis, and Simulation of Wireless and Cellular Systems. Proceedings of the 24th Annual IEEE Joint Conference of the Computer and Communications Societies IEEE INFOCOM 2005 Miami, FL, USA.
Proceedings of the 19th Annual IEEE Joint Conference of the IEEE Computer and Communications Societies (INFOCOM 2000) Tel Aviv, Israel. Proceedings of the 24th Annual IEEE Joint Conference of the IEEE Computer and Communications Societies (INFOCOM 2005) Miami, FL, USA p.
S UMMARY OF THE PROPOSED ALGORITHMS
C HAPTER SUMMARY
In this chapter, we presented a new hybrid Application-centric Connectivity Restoration (ACR) algorithm that considers application-level concerns in addition to resource optimization while recovering from critical node failures. ACR takes application-level constraints into account, such as actor action capabilities and a critical task index, while naming backup nodes to prevent application-level failures. ACR designates highly connected backup nodes with overlapping coverage to minimize the impact of critical node failures on coverage and connectivity.
The results also showed that ACR outperforms modern recovery schemes and limits the impact of node failure on network coverage and connectivity. Furthermore, the chapter concludes with a summary of our proposed reactive and hybrid connectivity recovery algorithms presented in Sections 3, 4, and 5.
CONCLUSION AND FUTURE WORK
L OCALIZED MOVEMENT CONTROL CONNECTIVITY RESTORATION ALGORITHMS
S UMMARY OF THE CONTRIBUTIONS
The analysis and simulation results confirmed that the proposed approaches keep most of the topology intact and reduce the coverage loss compared to the state-of-the-art recovery schemes. All the proposed approaches in Chapters 3-5 require each actor to maintain only a list of immediate neighbors. This not only improves network scalability, but also significantly reduces communication costs during recovery.
The neighbors of the failed actor diagnose the failure and initiate a recovery process that does not require external intervention.
F UTURE WORK
C2AM: an algorithm for assisted motion recovery with application awareness in wireless sensor and actor networks.