Vì n là ntt nên (ntt-n) là tốc độ cắt của các dẫn hướng rôto của từ trường quay. Như vậy, trong máy điện đồng bộ, tốc độ quay của rôto và tốc độ quay của từ trường của tải là như nhau.
CÁC PHƢƠNG PHÁP KHỞI ĐỘNG ĐỘNG CƠ 1. Quá trình mở máy động cơ điện không đồng bộ
Các phƣơng pháp mở máy
Phải có đủ mômen mở để đáp ứng các đặc tính cơ học của tải. Phương pháp mở máy và các thiết bị cần thiết phải đơn giản, rẻ tiền và ổn định.
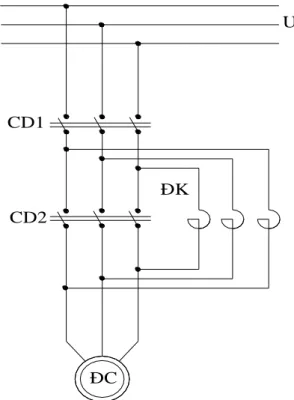
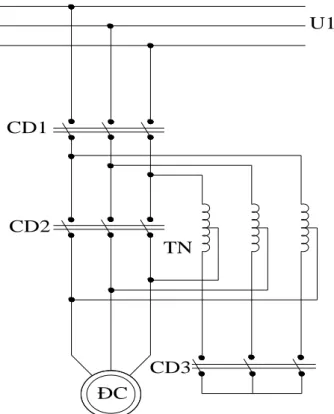
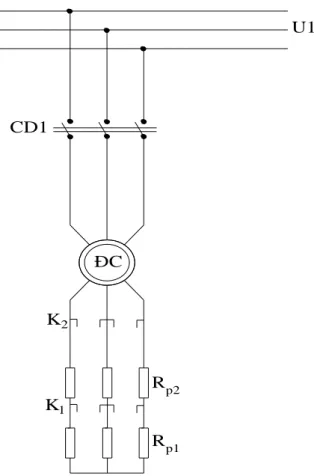
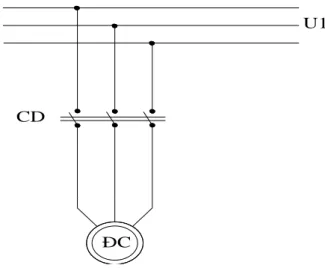
Khởi động động cơ điện roto lồng sóc 1. Khởi động trực tiếp
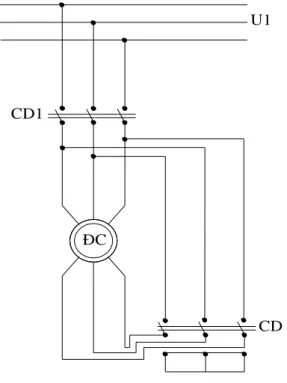
- Khởi động động cơ bằng cách thêm điện trở phụ vào rôto
Ngoài ra, phương pháp này còn có mô men khởi động lớn cho thời gian khởi động nhanh. Nhược điểm: Phương pháp này có dòng khởi động lớn và cần nguồn điện lớn cho động cơ.
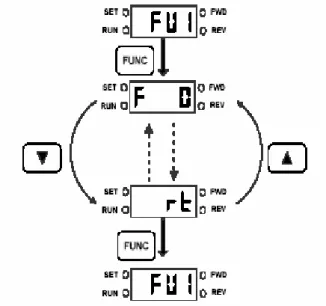
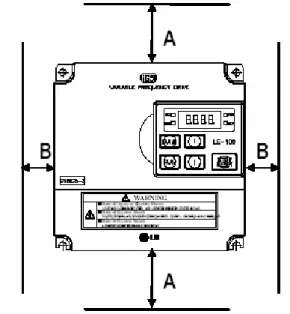
Lắp đặt
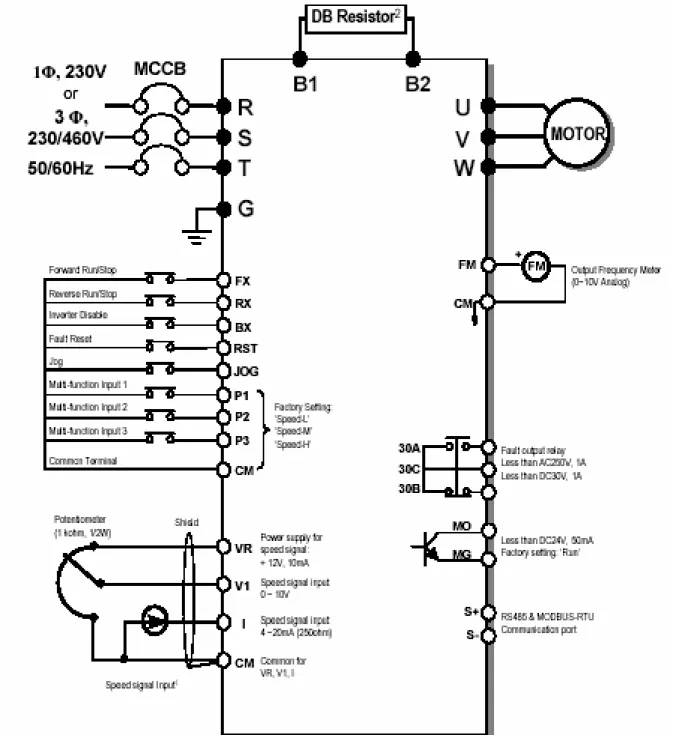
- Cách đấu dây
- Sơ đồ đấu dây của biến tần
- Nối dây mạch điều khiển
Đảm bảo điện áp đầu vào định mức của biến tần phù hợp với điện áp nguồn AC. Dừng khẩn cấp Khi Bx hoạt động, đầu ra biến tần bị tắt. Các mô-đun này được sử dụng cho nhiều ứng dụng lập trình khác nhau.
Về hình thức bên ngoài, sự khác biệt giữa các loại CPU này có thể được nhận biết qua đầu vào, đầu ra và nguồn điện. Phần cứng có bộ điều khiển khả trình PLC được tạo thành từ các mô-đun. Đường ray điện để định tuyến nguồn điện một chiều từ đầu ra của mô-đun nguồn PSCN (thường là 24V) để cung cấp cho các mô-đun khác.
Bus truyền thông để trao đổi thông tin giữa các module và thế giới bên ngoài.
Đơn vị xử lý trung tâm CPU
Ngoài ra, để giảm bớt các vấn đề về điều khiển số, PLC còn có các chức năng đặc biệt như bộ đếm, bộ hẹn giờ và các khối chức năng chuyên dụng. Mỗi module được lắp ráp thành một khối riêng biệt, có đầu nối nhiều chân giúp dễ dàng kết nối và xuất ra bảng cơ khí dưới dạng hộp hoặc bảng mạch in. Loại này có tốc độ xử lý cao hơn nên phù hợp hơn để xử lý nhanh các thông tin số và thực hiện các bài toán phức tạp.
Sở dĩ nó đạt được tốc độ cao là vì nó có thể xử lý không chỉ các bit mà còn có thể xử lý các từ gồm nhiều bit, lên đến 16 bit. Nguyên lý làm việc của CPU: Thông tin được lưu trữ trong bộ nhớ chương trình được truy cập tuần tự vì nó được điều khiển bởi bộ nhớ chương trình. Bộ vi xử lý liên kết các tín hiệu riêng lẻ với nhau theo các quy tắc mà từ đó các lệnh kết quả được thực thi.
Hoạt động tuần tự của chương trình dẫn đến độ trễ gọi là thời gian quét.
Bộ nhớ S7 – 200
- Vùng nhớ tham số
- Vùng nhớ dữ liệu
- Vùng nhớ đối tƣợng
Vùng bộ nhớ dữ liệu được sử dụng để lưu trữ dữ liệu chương trình bao gồm kết quả tính toán, các hằng số được xác định trong chương trình và bộ đệm truyền thông. Vùng bộ nhớ dữ liệu là vùng bộ nhớ động, nó có thể được truy cập từng bit, từng byte, từng từ đơn (word) hoặc từ kép. Việc ghi dữ liệu dạng bảng rất hạn chế vì dữ liệu dạng bảng thường chỉ được sử dụng cho những mục đích cụ thể.
Vùng nhớ dữ liệu được chia thành các vùng nhớ nhỏ với các mục đích sử dụng khác nhau. Bộ nhớ đối tượng dùng để lưu trữ dữ liệu cho các đối tượng lập trình như giá trị tức thời, giá trị đặc biệt của bộ đếm hoặc bộ định thời. Dữ liệu loại đối tượng bao gồm các thanh ghi hẹn giờ, bộ đếm, bộ đếm tốc độ cao, bộ đệm I/O tương tự và thanh ghi AC (tích lũy).
Các kiểu dữ liệu đối tượng rất hạn chế vì các kiểu dữ liệu đối tượng được đăng ký theo mục đích sử dụng của đối tượng đó.
Modul đầu vào
Modul đầu ra
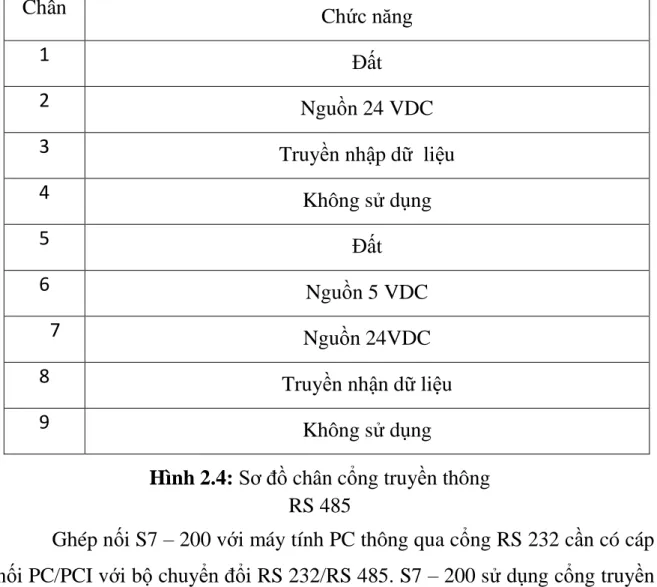
Tất cả các miền này có thể được truy cập từng bit, từng byte hoặc bằng một từ hoặc ngăn xếp. Mô-đun giao diện được sử dụng để kết nối các thiết bị điều khiển khả trình với các thiết bị bên ngoài như màn hình, bảng mở rộng hoặc thiết bị lập trình thông qua cổng giao tiếp nối tiếp RS 485 với đầu cắm 9 chân gọi là cổng MPI. Ngoài ra, các chức năng bổ sung cũng cần thiết để hoạt động song song với các chức năng thuần túy của PLC cơ bản.
Đôi khi người ta thêm các thẻ điện tử đặc biệt để tạo ra những tính năng bổ sung này. S7 – 200 sử dụng cổng giao tiếp nối tiếp RS có đầu cắm 9 chân để kết nối với các thiết bị lập trình khác hoặc các trạm PLC khác.
Các chức năng phụ
Nguồn cấp, pin và nguồn nuôi bộ nhớ
THỰC HIỆN CHƢƠNG TRÌNH
Khi gặp lệnh I/O ngay lập tức, hệ thống sẽ ngay lập tức dừng mọi thứ khác, kể cả trình xử lý ngắt, để thực thi lệnh này trực tiếp bằng cổng I/O. Các chương trình dành cho PLC S7 - 200 cần có cấu trúc bao gồm: Chương trình chính và sau đó là các chương trình con và chương trình xử lý ngắt được trình bày bên dưới. Các chương trình con phải được viết sau câu lệnh kết thúc chương trình MEND chính.
Nếu cần sử dụng bộ xử lý ngắt thì nó phải được viết sau lệnh MEND để kết thúc chương trình chính. Có thể do trộn lẫn các chương trình con và các chương trình xử lý ngắt phía sau chương trình chính. Nếu chương trình được viết theo kiểu LAD thì thiết bị lập trình sẽ tự động tạo chương trình theo kiểu STL tương ứng.
Ngược lại, không phải tất cả các chương trình được viết ở định dạng STL đều có thể được chuyển đổi sang định dạng LAD.
Q,M,SM,T (bit) C,V
Lệnh ra: OUT PUT (=)
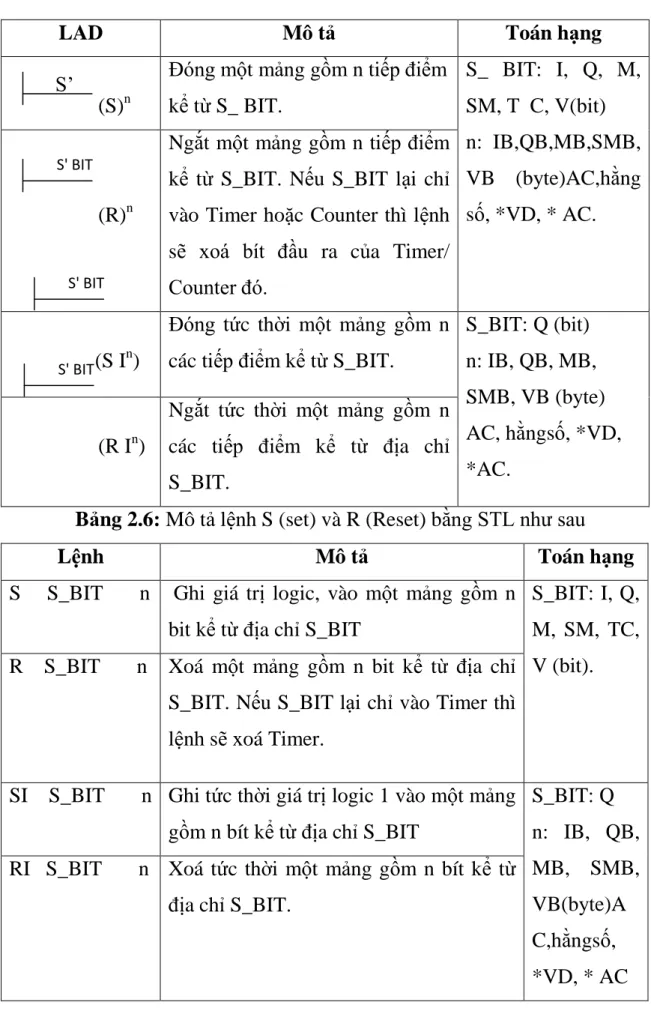
Các lệnh ghi/ xoá giá trị cho tiếp điểm
S S_BIT n Ghi một giá trị logic vào một mảng n bit bắt đầu từ địa chỉ S_BIT. SI S_BIT n Ghi ngay giá trị logic 1 vào mảng n bit bắt đầu từ địa chỉ S_BIT. Lệnh thực thi các toán tử (A) và (O) giữa giá trị logic của công tắc n và giá trị bit đầu tiên trong ngăn xếp.
Nếu giá trị đếm tức thời lớn hơn hoặc bằng giá trị PT mặc định thì bit T có giá trị logic là 1. Bộ định thời loại TON có thể được đặt lại bằng lệnh R hoặc bằng giá trị logic 0 ở đầu vào IN. Khi giá trị đếm tức thời của từ C lớn hơn hoặc bằng giá trị mặc định n, bit C có giá trị logic là 1.
Khi giá trị đếm hiện tại của từ C lớn hơn hoặc bằng giá trị đặt trước n.
Các lệnh can thiệp vào thời gian vòng quét
Lệnh thực hiện phép tính logic tải giá trị logic 1 với nội dung ngăn xếp khi nội dung của 2 byte, từ, từ kép, số thực, n1, n2 thỏa mãn n1=n2.
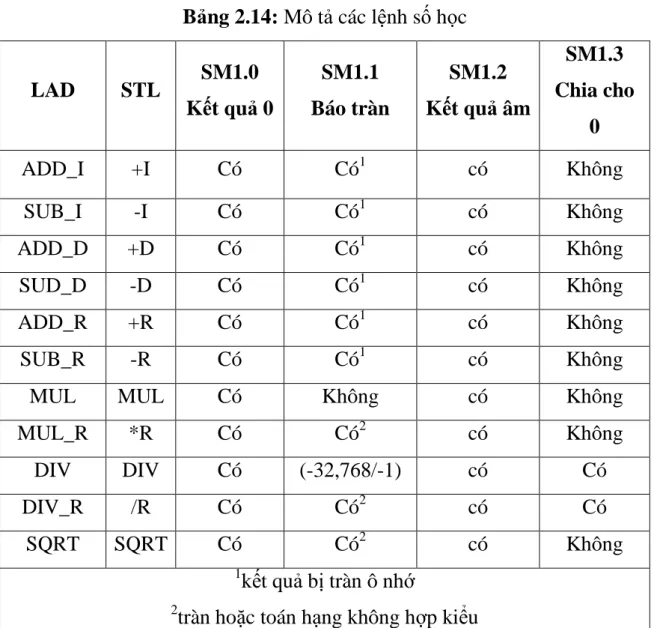
Các lệnh số học
- ADD_I (LAD): I (STL)
- MUL_R (LAD): R (STL)
- DIV_R (LAD): R (STL)
- MOV_B (LAD): MOV_B (STL)
Trong LAD: Lệnh thực hiện phép nhân hai số nguyên 16 bit IN1 và IN2 và kết quả là số nguyên 32 bit được ghi vào OUT. Trong LAD: Lệnh thực hiện phép chia số nguyên 16 bit IN1 cho số nguyên 16 bit IN2 và kết quả là số nguyên 32 bit được ghi vào từ kép. Trong LAD, lệnh thực hiện phép nhân hai số thực 32 bit IN1 và IN2 và kết quả là số thực 32 bit được ghi vào OUT.
Trong STL, lệnh thực hiện phép nhân giữa số thực 32 bit IN1 và IN2 và kết quả là số thực 32 bit được ghi vào IN2. Trong STL, lệnh thực hiện phép chia giữa số thực 32 bit IN1 cho số thực 32 bit IN2. Trong LAD và trong STL, lệnh shift di chuyển hoặc sao chép nội dung của một byte, một từ, một từ kép hoặc một giá trị thực từ vùng nhớ này sang vùng nhớ khác.
Lệnh sao chép nội dung của từ kép IN thành từ kép OUT Cú pháp của lệnh MOVDW trong STL và LAD như sau.
TÍNH CHỌN CÁC THÔNG SỐ THIẾT BỊ 1 Tính chọn cầu chì
- Tính chọn Áptômát
- Tính chọn dây dẫn
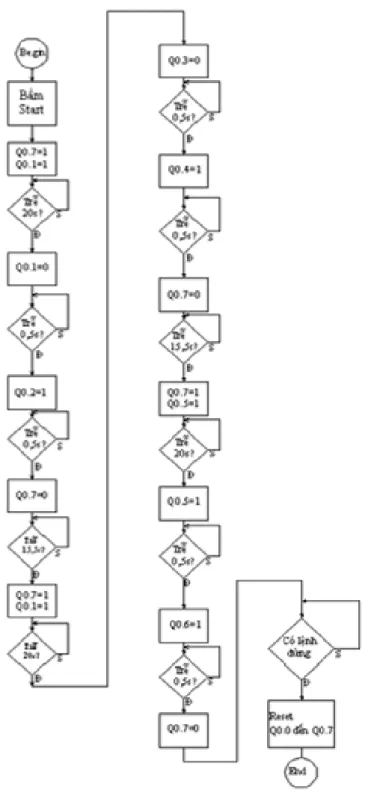
PLC xuất tín hiệu điều khiển biến tần khởi động bơm 1. Sau khi đạt được tốc độ chỉ định, PLC sẽ điều khiển bơm 1 để lấy nguồn trực tiếp từ mạng. Sau một thời gian, bơm 2 được bật bằng biến tần, quá trình tiếp tục như với bơm 1. Sau một thời gian, bơm 3 được bật bằng biến tần, quá trình tiếp tục như với bơm 2.
Quy trình chi tiết như sau: Ấn đầu tiên khởi động I0.0, P1 bật nguồn để vận hành biến tần, cùng lúc đó cuộn hút K1 có điện, biến tần khởi động bơm 1. Ấn đầu tiên I0.0, P1 quay về nguồn điện để vận hành biến tần, đồng thời cuộn hút K1 có điện, biến tần khởi động máy bơm 1. Sau thời gian dài nghiên cứu tài liệu và thực hiện đồ án “Lập mô hình hệ thống khởi động cho nhiều máy bơm Trạm bơm nước tưới sử dụng biến tần LS.
Trong đề tài này, tôi nghiên cứu và giải quyết các vấn đề sau: biết lập trình thành công PLC, lắp đặt và vận hành bộ biến tần LS, lắp ráp, lắp đặt và chuẩn bị thiết bị cho mô hình.