Tên dự án: Tổng quan về Truyền động điện, Thiết kế chuyên sâu về mạch điều khiển tốc độ của động cơ DC đảo chiều cấp điện bằng bộ chuyển đổi. Ngày nay trong cuộc sống hàng ngày chúng ta thường bắt gặp hệ thống truyền động điện ở khắp mọi nơi. Do sự phát triển ngày càng mạnh mẽ của điện tử và công nghệ thông tin nên hệ thống truyền động điện cũng có những bước phát triển nhảy vọt.
Ở nước ta, trước nhu cầu công nghiệp hóa, hiện đại hóa đất nước, ngày càng xuất hiện nhiều dây chuyền sản xuất mới có mức độ tự động hóa cao với hệ thống truyền động hiện đại.
TỔNG QUÁT VỀ TRUYỀN ĐỘNG ĐIỆN MỘT CHIỀU
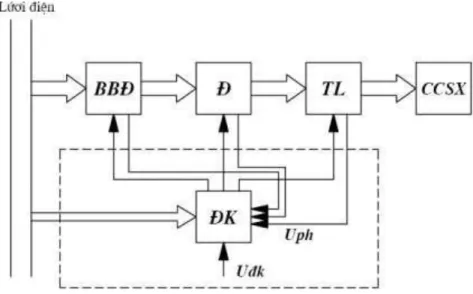
CÂU TRÚC VÀ PHÂN LOẠI TRUYỀN ĐỘNG ĐIỆN 1. Cấu trúc chung của hệ truyền độngđiện
- Phân loại hệ thống truyền độngđiện 1. Theo đặc điểm của động cơđiện
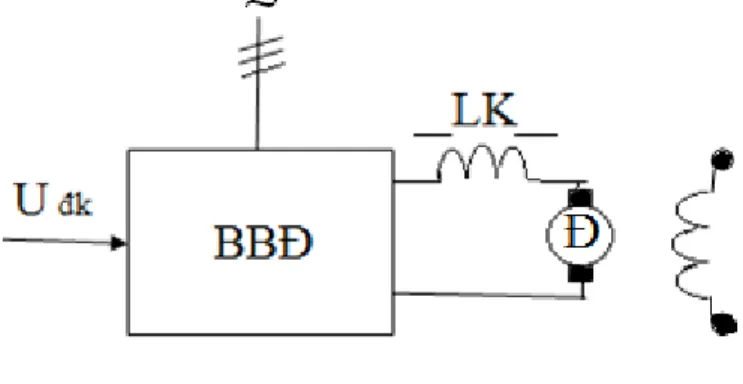
DK: Khối điều khiển là thiết bị dùng để điều khiển biến tần, động cơ điện D và cơ cấu truyền tải điện. Truyền động điện không đồng bộ: Sử dụng động cơ không đồng bộ AC. Truyền động điện đồng bộ: sử dụng động cơ đồng bộ xoay chiều ba pha.
Hệ thống máy phát điện-động cơ (F-D): Động cơ DC cấp nguồn cho máy phát điện DC (bộ chuyển đổi máy điện).
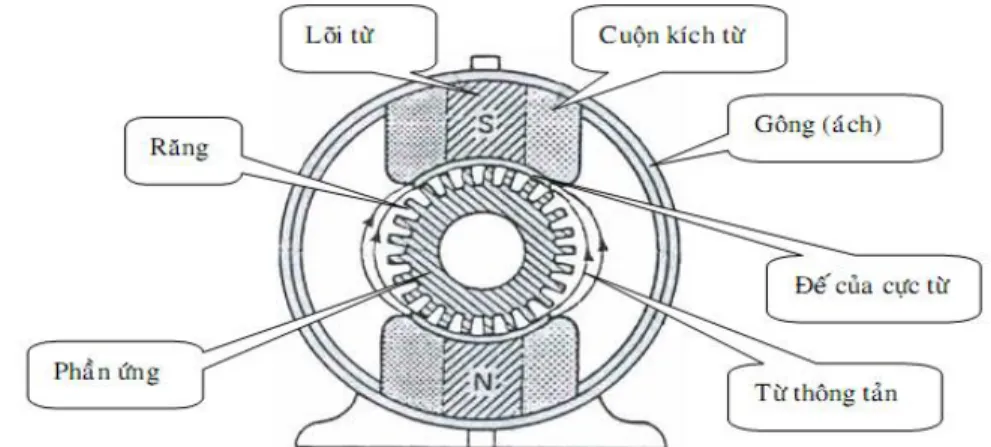
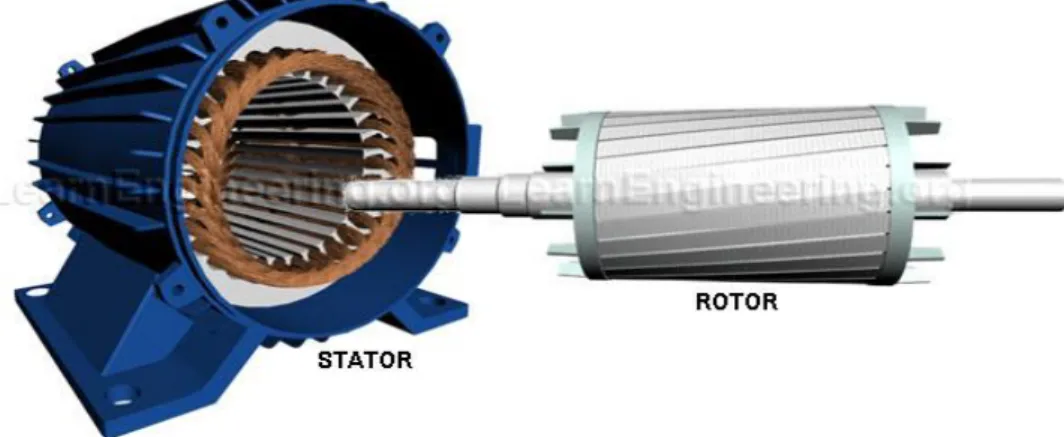
CẤU TẠO VÀ NGUYÊN LÝ LÀM VIỆC ĐỘNG CƠ MỘT CHIỀU .1. Cấu tạo
- Phần tĩnh: là Stato và luôn luôn là phần cảm. Phần cảm là phần nhận năng lượng điện một chiều để tạo ra từ trường kích từ
- Cổ góp và chổithan
- Nguyên lý hoạt động của động cơ điện 1chiều
- Mở máy và điều chỉnh tốc độ động cơ
- Mở máy động cơ điện một chiều
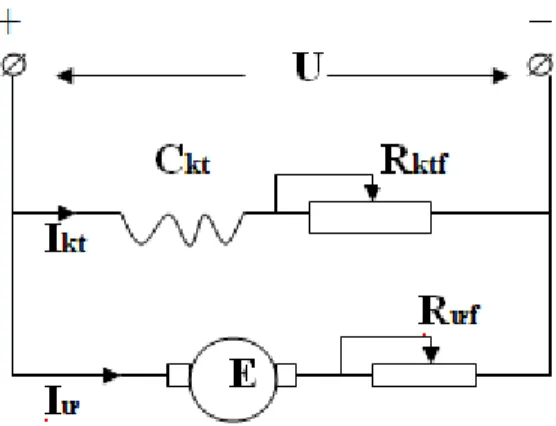
Giá đựng chổi than, hộp đựng chổi than và chổi than đều được cách ly với vỏ máy. Giá đỡ chổi than có thể được điều chỉnh vào vị trí bằng vít. Phương pháp này được sử dụng khi có nguồn điện một chiều có điện áp điều chỉnh được. Vì vậy, chúng ta có ba phương án để điều chỉnh tốc độ của động cơ DC.
Điều chỉnh tốc độ bằng cách thay đổi điện trở phụ Rf trên mạch phần ứng. Điều chỉnh tốc độ bằng cách thay đổi điện trở phụ Rf trên mạch phần ứng. Một điều hiển nhiên nữa là vì chúng ta chỉ có thể thêm Rf chứ không thể giảm Ru nên ở đây chúng ta chỉ có thể điều chỉnh tốc độ dưới tốc độ định mức.
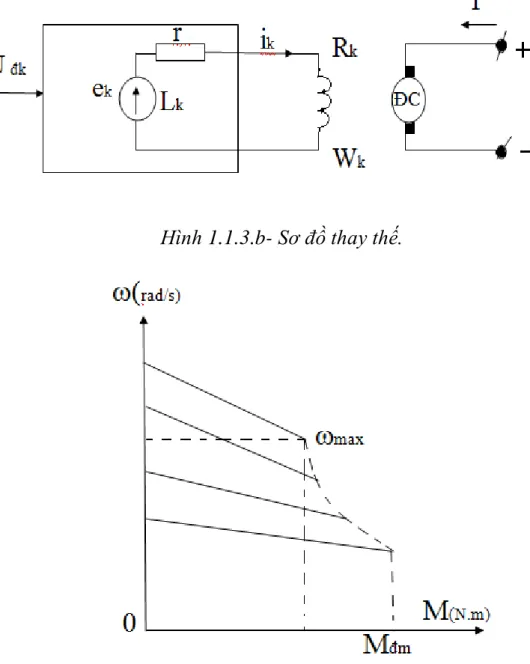
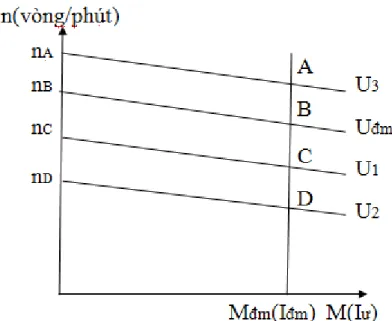
Phương pháp này cho phép điều chỉnh tốc độ cả trên và dưới định mức. Đặc điểm quan trọng của phương pháp là khi điều chỉnh tốc độ, mômen quay không đổi do từ thông và dòng điện phần ứng không thay đổi (M = CM. Phạm vi điều chỉnh tốc độ của hệ thống bị chặn bởi đặc tính cơ bản, đặc tính tương đương đến điện áp định mức và từ thông định mức.
Với ω0max, Mdm, KM được xác định cho từng máy, khoảng điều chỉnh D phụ thuộc tuyến tính vào giá trị độ cứng β. Khi điều chỉnh điện áp phần ứng của động cơ DC bằng các đơn vị dòng điện điều chỉnh được, tổng điện trở mạch phần ứng gấp khoảng 2 lần điện trở phần ứng của động cơ. Vì vậy, phạm vi điều chỉnh tốc độ động cơ không vượt quá 10 khi tải có đặc tính mô men xoắn không đổi.
Để bật máy, dùng biến trở để bật máy R. Mở, để cài đặt tốc độ, thường đặt Rdc.
BỘ BIẾN ĐỔI XUNG ÁP 1 CHIỀUVÀ PHƯƠNG PHÁP PWM
ĐẶT VẤN ĐỀ
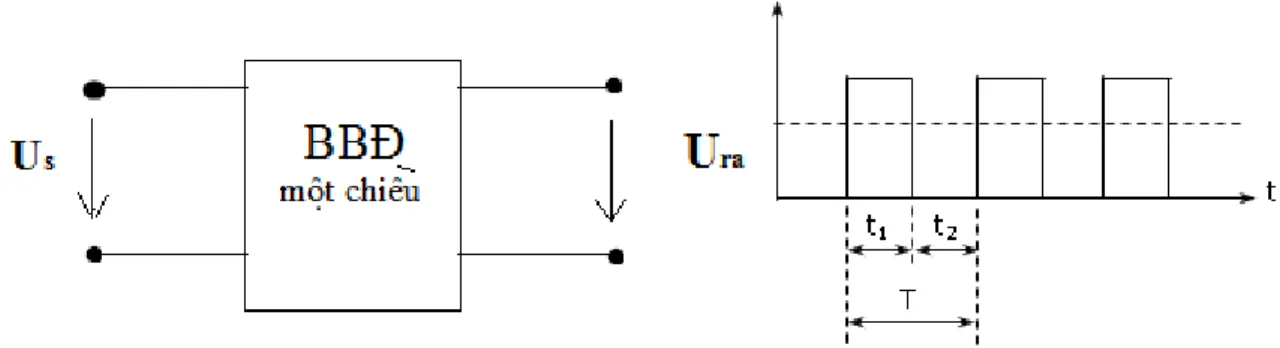
- Nguyên lí chung của bộ biến đổi xung áp 1 chiều
- Phương pháp thay đổi độ rộng xung
- Phương pháp thay đổi tần số xung
- Các dạng băm xung cơ bản
- Xung áp đảo dòng lớp B
- Xung áp đảo áp lớp B
- Xung áp song song
- Xung áp nối tiếp
So với các phương pháp thay đổi điện áp DC để điều chỉnh tốc độ động cơ DC như điều chỉnh bằng điện trở thay đổi, bằng máy phát điện một chiều, bằng bộ chuyển đổi có tầng trung gian AC, bằng bộ chỉnh lưu có điều khiển. Mạch cắt xung đặc biệt thích hợp cho động cơ DC có công suất nhỏ. Trong thực tế, phương pháp biến đổi độ rộng xung được sử dụng phổ biến hơn vì nó đơn giản hơn và không cần thiết bị biến tần đi kèm.
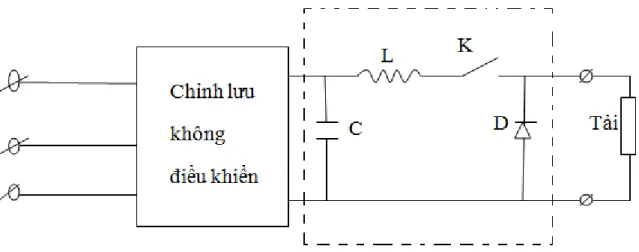
Ở đây chúng ta chọn thay đổi độ rộng xung, phương pháp này gọi làPWM (Điều chế độ rộng xung), theo phương pháp này tần số băm của xung sẽ không đổi. Tải là phần ứng động cơ DC kích thích độc lập được thay thế bằng mạch tương đương R-L-E. Ở trạng thái nghỉ, động cơ được nối với nguồn điện, điện áp đặt vào động cơ là U.
Trong khoảng thời gian đó, động cơ bị chập mạch bởi , điện áp đặt vào động cơ là 0. Khi đó, do quán tính nên động cơ vẫn quay cùng chiều dù đã ngắt nguồn E > 0. Tại Lúc này, mạch tải chỉ có một nguồn E ngắn mạch qua S2 và dòng điện chạy ngược chiều với chiều ban đầu. Công suất điện từ của động cơ là: Pđt= Id.E > 0.
Sơ đồ này cho phép điều chỉnh và đảo chiều linh hoạt của động cơ, hoạt động ở cả 4 góc phần tư. Kết luận: Trong đồ án này tôi sử dụng xung điện áp nối tiếp do mạch điều khiển tốc độ của động cơ DC nam châm vĩnh cửu bằng cách tăng hoặc giảm điện áp cấp vào động cơ để thay đổi từ 0v-24v. Vì vậy, chúng ta sử dụng xung điện áp nối tiếp để hạ điện áp đường dây từ 24v xuống 0v và để dòng điện chạy trong động cơ không vượt quá 24v, có thể gây quá tải và hư hỏng động cơ.
PHƯƠNG PHÁP PWM
- Giới thiệu về phương pháp PWM
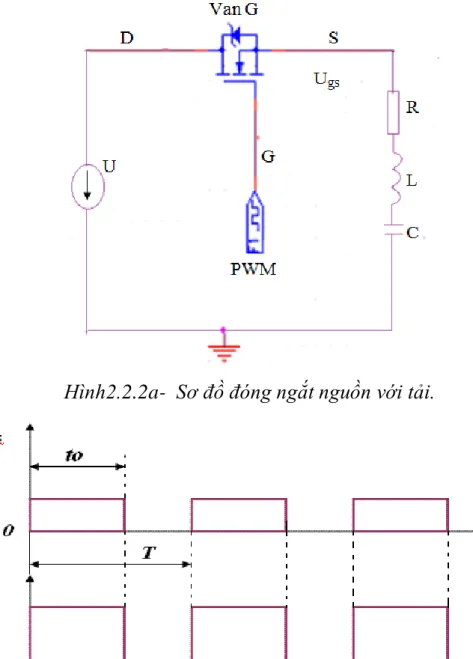
- Nguyên lý của phương pháp PWM.Đây là phương pháp được thực hiện theo nguyên tắc đóng ngắt nguồn tới tải và một cách có chu kì theo luật điều
- Các cách để tạo ra được PWM để điều khiển
- Tạo bằng phương pháp so sánh
- Tạo xung vuông bằng phần mềm
- PWN trong các bộ biến đổi xung áp
Vì vậy, thời gian xung trong 1 chu kỳ càng dài thì điện áp đầu ra sẽ càng cao. Nhìn vào hình vẽ trên ta có thể tính được điện áp ra của tải. Vì vậy, chúng ta có thể tính được điện áp đầu ra của tải với độ rộng xung tùy ý.
Phạm vi điều khiển rộng hơn phạm vi điều khiển của mạch điều chỉnh tuyến tính - Động cơ quay nhanh hơn khi áp dụng chuỗi xung được điều chế bằng tín hiệu điều chế bằng tín hiệu xung điều chế bằng tín hiệu điều chế độ rộng (PWM) so với khi cung cấp điện áp tương đương với điện áp trung bình của chuỗi xung điều chế bằng công nghệ điều chế xung.b. Nhược điểm.- Mạch cần bổ sung thêm điện tử - chi phí cao. Trên đây là mạch chính điều khiển tải sử dụng PLC và sơ đồ xung chân điều khiển và dạng điện áp đầu ra khi sử dụng PLC. Nguyên tắc: Trong khoảng thời gian từ 0 - tới, ta mở van G, toàn bộ điện áp của nguồn Ud được đưa vào tải.
Vì vậy, khi chuyển từ 0 sang T, chúng ta sẽ chặn hoàn toàn, một phần hoặc toàn bộ điện áp cung cấp cho tải. Tín hiệu gần đúng là điện áp tham chiếu xác định mức công suất điều chế (tín hiệu DC). Nếu muốn điều khiển xe tiến lùi thì cần sử dụng cầu chữ H.
Trong số các bộ chuyển đổi điện áp, điều chỉnh dòng điện đầu ra và điện áp tải là đặc biệt quan trọng, có rất nhiều loại bộ chuyển đổi điện áp, chẳng hạn như bộ chuyển đổi điện áp nối tiếp và bộ chuyển đổi điện áp song song. Sử dụng các xung điều khiển để tích lũy năng lượng từ trường nhằm tạo ra điện áp đầu ra tải lớn hơn điện áp đầu vào.
THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN TỐC ĐỌ ĐỘNG CƠ MỘT CHIỀU
SƠ ĐỒ KHỐI
- Tính chọn linh kiện 1.Tính chọn Mostfet
- Tính chọn cầu chì
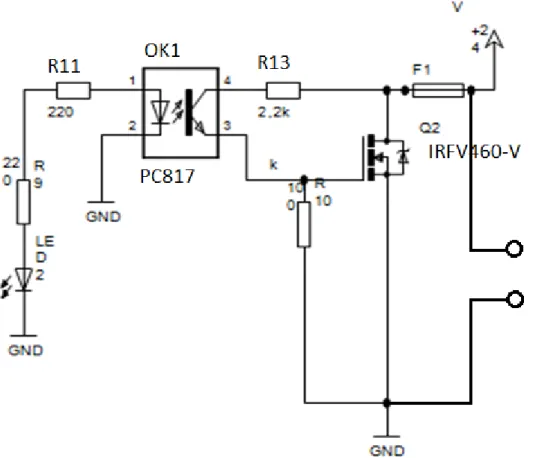
Mostfet cắt dòng điện động cơ theo tín hiệu xung điện áp nhận được từ mạch điều khiển. Từ đó, tốc độ động có thể được thay đổi. Cầu chì bảo vệ Mosfet khi xảy ra quá điện áp. Động cơ trong mạch là động cơ DC có công suất 30W, chọn loại van bán dẫn IRF 460N, có thể bật tắt với dòng điện lên tới 37,5A và đóng ngắt với tần số rất cao lên đến 1MHZ sau điện áp đi qua mạch, bộ so sánh có dạng xung vuông, bằng cách thay đổi giá trị của biến chúng ta có thể thay đổi độ dẫn điện của MOSFET và từ đó thay đổi được điện áp ra ở hai đầu của động cơ. Ikđ: dòng điện khởi động lớn nhất của động cơ điện, theo tính toán trên ta có Ikđ = 5A.
MẠCH ĐIỀU KHIỂN
- Mạch đảo chiều động cơ
- Mạch điều khiển tốc độ động cơ
- Khối nguồn
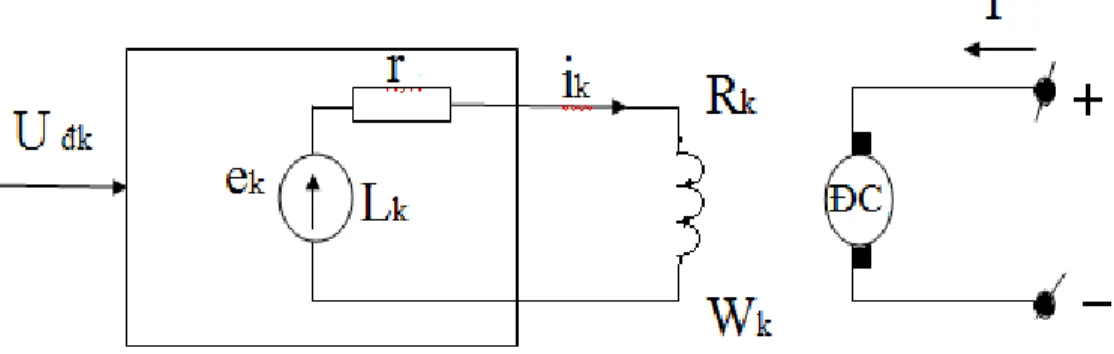
Mạch lặp có chức năng ổn định điện áp đầu ra lấy từ cầu chia điện áp đưa vào đầu vào không đảo của ic khuếch đại thuật toán. Tạo điện áp răng cưa bằng cách lấy tích phân xung vuông tại OA1. Xung vuông có thể được tạo ra bằng nhiều cách khác nhau. Nếu điện áp đầu vào giai đoạn tích phân không đối xứng thì có thể xảy ra lỗi nghiêm trọng.
Điện áp răng cưa sẽ thu được tuyến tính hơn khi sử dụng sơ đồ 1. Khuếch đại OA1 có hồi tiếp dương bằng điện trở R3, đầu ra có giá trị điện áp nguồn và dấu phụ thuộc vào hiệu điện thế hai cổng V+ và V-. Điện áp tiêu chuẩn để so sánh quyết định thay đổi điện áp ra của OA1 là trung tính về V-.
Giả sử đầu ra của OA1 là dương, U1>0 khuếch đại OA2, tích phân ngược sẽ cho điện áp giảm dần của điện áp răng cưa. Chu kỳ điện áp ra của OA1 lần lượt đổi dấu, cho ta điện áp ra như hình 2. Bằng cách chọn giá trị của điện trở và tụ điện, ta được điện áp với chu kỳ mong muốn.
Cầu chỉnh lưu B2 tạo ra điện áp DC 12v cho toàn mạch. FET được bật bằng xung điều khiển từ xa, làm thay đổi điện áp trung bình cấp vào động cơ, thay đổi tốc độ của động cơ.
KẾT LUẬN