5 BAB II TINJAUAN PUSTAKA 2.1 Robot
Teks penuh
Gambar
Garis besar
Dokumen terkait
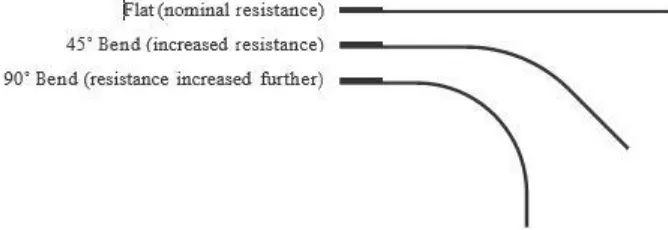
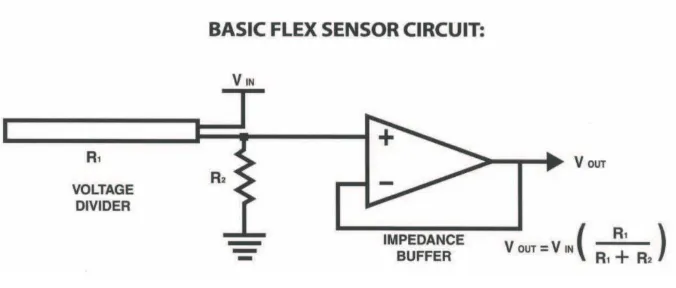
Gerakan yang dilakukan oleh lengan robot tersebut dirancang untuk meniru gerakan tangan manusia atau user yang mengendalikannya dengan menggunakan flex sensor sebagai
1. Implementasi sinyal dari electromyogram dan sensor accelerometer menjadi pengontrol gerakan lengan robot berhasil direalisasikan dan sistem bekerja sesuai dengan yang
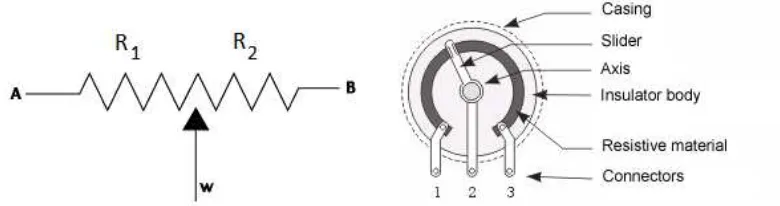
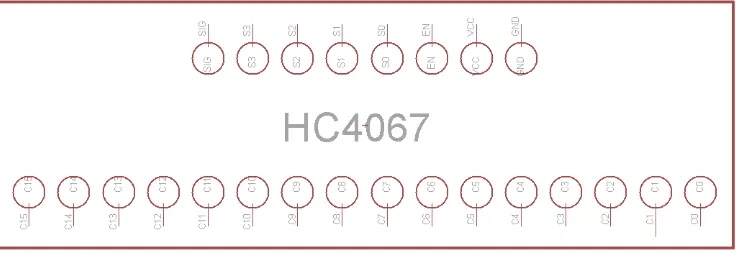
Input analog atau analog pin adalah pin-pin yang berfungsi untuk menerima sinyal dari komponen atau rangkaian analog, contohnya potensiometer, sensor suhu, sensor cahaya,
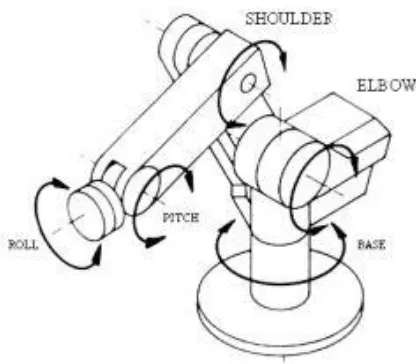
Servomechanism adalah mekanisme di mana pengendali harus mengendalikan nilai sebuah variabel untuk mengikuti sebuah set point yang berubah, misalnya menggerakkan lengan robot
Sebelumnya telah dibuat sistem mikrokontroler untuk mengendalikan robot tangan EH1 Milano, dengan sensor gerak berupa sarung tangan yang dilengkapi potensiometer,
Proses dalam sistem kontrol loop-terbuka dikontrol dengan pemberian input pada pengontrol titik penyetelan yang dikehendaki (juga disebut komando dan referensi)
Pada sistem kendali lengan robot menggunakan metode pengolahan citra, tahapan yang bekerja secara garis besar yaitu, diawali dengan mendeteksi gerakan lengan
Lengan robot yang dibuat oleh penulis lebih menitik beratkan pada jenis kontrol kinematika dengan memanfaatkan program pada mikrokontroler karena memiliki struktur dinamika yang
