This project titled “Design and Implementation of a Robot for Road Cleaning and Fire Fighting” submitted by Md. Emdadul hossen ID in the Department of Computer Science and Engineering, Daffodil International University, has been accepted as satisfactory in partial fulfillment of the requirements for the degree of B.Sc. I hereby declare that this project was carried out by myself under the supervision of Gazi Zahirul Islam, Assistant Professor, Department of CSE Daffodil International University.
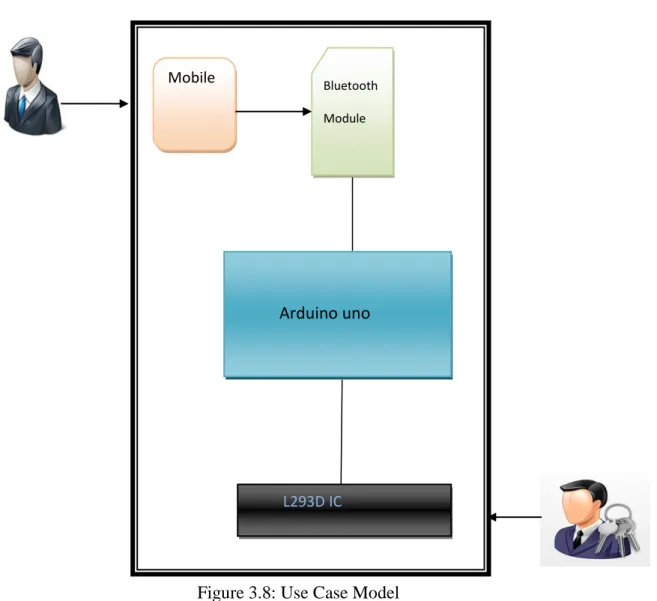
I am very thankful and wish our deep indebtedness to Gazi Zahirul Islam, Assistant Professor of CSE Daffodil International University Department, Dhaka. In this project here the android application interacts with the Bluetooth module and then sends the digital data to the arduino. The main goal of this project is to design a fire fighting robot using Android application for remote operation.
On the receiver side, two motors are connected to the Arduino uno where two of them are used to move the vehicle and the other to position the robot arm. This gives the robot a greater degree of freedom to collect debris from almost every nook and corner of the area.
Expected Outcome
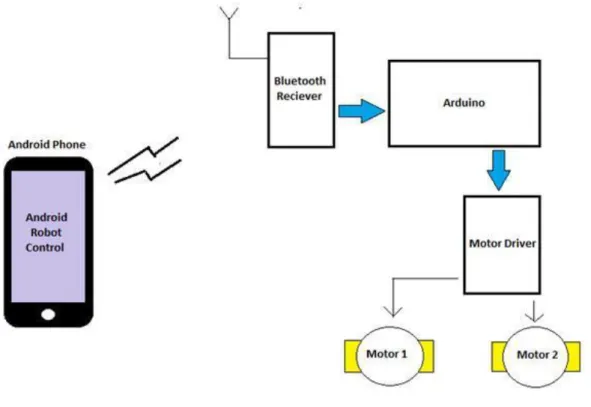
The fire fighting robot has a water tanker to pump water and spray on the fire; it is controlled by wireless communication. In the expected system, an Android application is used to send commands from the transmitter to the receiver to control the movement of the robot in forward, backward, right or left directions. The Android device transmitter acts as a remote control with the advantage that it actually accepts sufficient range, while the receiver has a Bluetooth device that is fed to the Arduino uno to drive gear motors through the motor driver IC (L293D) for specific operation to drive.
Smart Factories: Energy-aware, agile manufacturing and adaptation, especially to a target result that specifically calls for the development of "Large-Scale Sourcing of Advanced Industrial Robotics Systems". In this regard, it should be emphasized that the goal of the project is the validation of the new robotic infrastructure to improve production integration for a fully automatic factory. Chapter 5 discusses database implementation, front-end design, and interaction design.
In Chapter 6, a summary of this, my road clearing fire engine and I discussed what I can develop in a future project.
BACKGROUND
Introduction
In many assembly plants today, the conveyor belt of people has been replaced by the conveyor belt of robots, which do the same work, but more safely and efficiently than was the case with a human team.
Comparative studies
Based on these considerations, the author proposes five key elements to develop useful and reasonably priced robots for fire departments.
Challenges
A study by Accenture found that 75% of manufacturing companies reported a shortage of skilled workers requiring more than a bachelor's degree. As boomers age and retire, the need for people to replace them increases, but you can't simply give people the skills needed to replace those jobs. Manual guidance - The ability to know when a person is in contact with the robot for guidance and training. Power and Force Limiting - Sensors and technology that limit the amount of force applied.
REQUIREMENT ANALYSIS
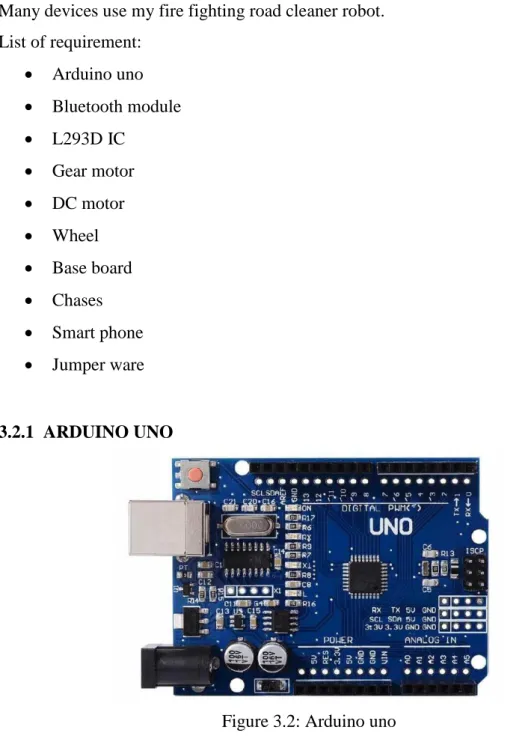
ARDUINO UNO
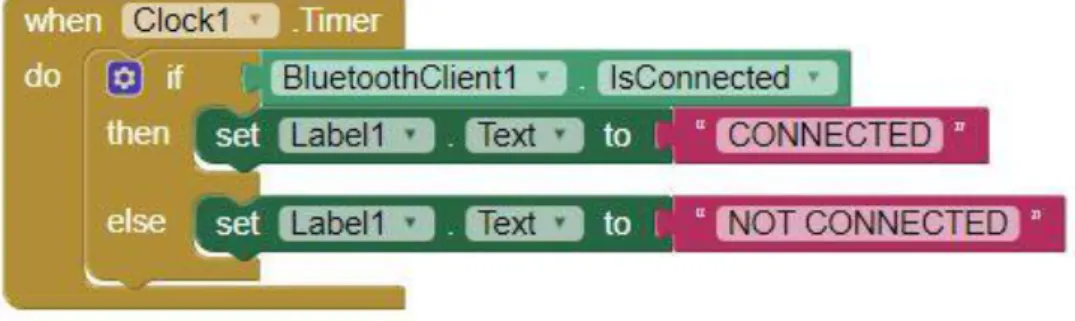
You can tinker with your UNO without too much of a fight to do something wrong, at worst you can replace the chip for a few bucks. I have done some important system design and implementation. ENABLE: When enable is pulled LOW, the module is disabled, meaning the module will not power up and communicate. When the module is not connected to/paired with any other Bluetooth device, signal goes low.
In this low state, the LED will flash continuously, indicating that the module is not paired with another device. When this module is connected to/paired with any other Bluetooth device, the signal will be loud. In this high state, the LED flashes with a constant delay, e.g. 2s delay indicating the module is paired.
With the help of AT commands, the user can change the parameters of this module, but only if the module is not paired with any other BT device. If the module is connected to any other Bluetooth device, it starts communicating with that device and does not work in AT command mode (Figure 3.3). Motor drivers act as current amplifiers by taking a low current control signal and providing a higher current signal.
In the usual mode of operation, two DC motors can be driven simultaneously in both forward and reverse directions. The motor operation of two motors can be controlled by input logic on pins 2 & 7 and 10 & 15.

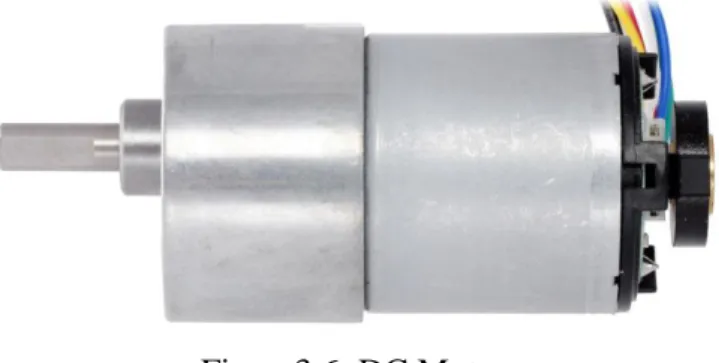
Gear Motor and Wheel
A DC motor is any of a class of rotating electrical machines that convert direct current electrical energy into mechanical energy. A jumper wire is an electrical wire or group of wires in a cable with a connector or pin on each end (or sometimes without - simply "tinned"), usually used to connect the components of a breadboard or other prototype or connect test. circuit,. A logical data model describes the data in as much detail as possible, regardless of how it will be physically implemented in the database.
Design Requirement
DESIGN SPECIFICATION
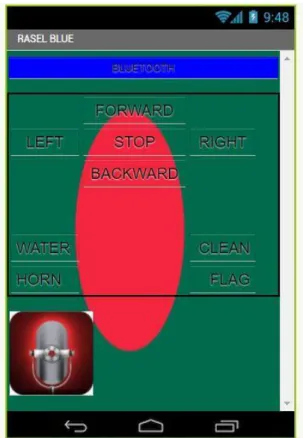
Front-end Design
Back-end Design
- Creating Apps
Then connect to the Bluetooth device with the specified address and Serial Port Profile (SPP). The user touched and released the forward button, then sent the text to the connected Bluetooth device and the text string. The user touched and released the left button, then sent the text to the connected Bluetooth device and the text string.
The user taps and releases the right button to send text to the connected Bluetooth device and the text string. The user tapped and released the back button to send text to the connected Bluetooth device and the text string. The user taps and releases the water button to send text to the connected Bluetooth device and the text string.
The user tapped and released the horn button, sending text to the connected Bluetooth device and the text string. The user tapped and released the clean button, sending text to the connected Bluetooth device and the text string. The user tapped and released the flag button and then sent text to the connected Bluetooth device and the text string.
The user tapped and released the stop button and sent text to the connected Bluetooth device and the text string. After the speech is converted to text, the text-received event will be raised. Simple event to raise when voicerecord is called, but before the voicerecord activity starts.

IMPLEMENTATION AND TESTING
- Implementation of Database
- Implementation of Front-end Design
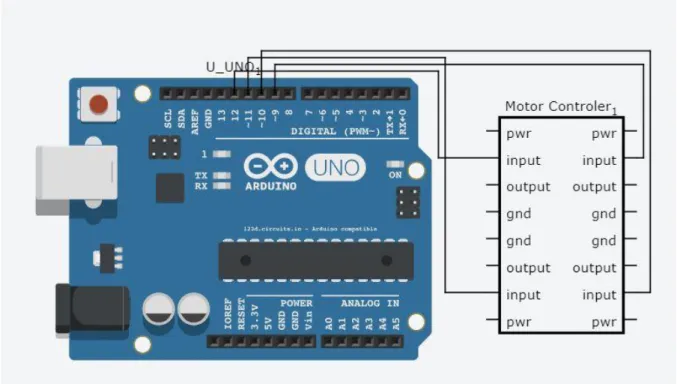
- Arduino uno to Bluetooth Module Connection
- Arduino uno to L293D IC Connection
- Arduino uno to power supply connection
- Implementation of Interaction
- Testing Implementation
Then connect Arduino uno power 5V, GND to Bluetooth module VCC, GND such as 5V to VCC and GND to GND.
CONCLUSION AND FUTURE SCOPE
Discussion and Conclusion
APPENDIX A