RANCANG BANGUN ALAT PENGUKUR PANJANG JALAN
MENGGUNAKAN SENSOR OPTOCOUPLER BERBASIS
MIKROKONTROLER ATMEGA8
TUGAS AKHIR
JEPRI PURWANTO
NIM : 112411018
PROGRAM STUDI D-3 METROLOGI DAN INSTRUMENTASI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
RANCANG BANGUN ALAT PENGUKUR PANJANG JALAN
MENGGUNAKAN SENSOR OPTOCOUPLER BERBASIS
MIKROKONTROLER ATMEGA8
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh Ahli Madya
JEPRI PURWANTO
NIM : 112411018
PROGRAM STUDI D-3 METROLOGI DAN INSTRUMENTASI
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : RANCANG BANGUN ALAT PENGUKUR PANJANG JALAN MENGGUNAKAN SENSOR OPTOCOUPLER BERBASIS MIKROKONTROLER ATMEGA8
Kategori : TUGAS AKHIR
Nama : JEPRI PURWANTO
NIM : 112411018
Program Studi : D-3 METROLOGI DAN INSTRUMENTASI Departemen : FISIKA
Fakultas : FISIKA MATEMATIKA DAN ILMU PENGETAHUAN ALAM (MIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, Juli 2014
Komisi Pembimbing :
Diketahui/Disetujui oleh
Program Studi D3 Metrologi dan Instrumentasi Pembimbing, Ketua,
(Dr. Diana Alemin Barus M,Sc) (
NIP . 196607291992032002 NIP.195510301980131003
PERNYATAAN
RANCANG BANGUN ALAT PENGUKUR PANJANG JALAN
MENGGUNAKAN SENSOR OPTOCOUPLER BERBASIS
MIKROKONTROLER ATMEGA8
TUGAS AKHIR
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing- masing di sebutkan sumbernya.
Medan, Juli 2014
PENGHARGAAN
Alhamdulillah puji dan syukur penulis ucapkan kepada Allah Subhanahuwata’ala, atas segala karuniaNya yang telah diberikan kepada penulis sehingga dapat menyelesaikan Tugas Akhir ini dengan baik. Shalawat dan Salam kepada Nabi Muhammad SAW semoga kita mendapatkan safa’atnya di kemudian hari. Amin
Dalam kesempatan ini penulis menyampaikan rasa hormat dan ucapan terima kasih yang sebesar- besarnya kepada keluarga tercinta Ayahanda Suparno Sp. dan Ibunda Srisudarsih, terima kasih atas kasih sayang dan kepercayaan yang telah kalian berikan kepada anak kalian ini, serta kakakku tercinta Median Sefiherawati dan Tiwi Utami, terimakasih buat dukungannya, doa dan motivasi yang diberikan dari awal mulai perkuliahan sampai penulisan Tugas Akhir ini serta buat seluruh keluarga yang telah membantu, mendukung dan memberikan kelonggaran serta support terhadap pendidikan saya hingga bisa berkembang seperti sekarang.
serta orang- orang yang mendukung sehingga penulis dapat menyelesaikan proyek Tugas Akhir ini. Pada kesempatan ini penulis mengucapkan terima kasih banyak kepada :
1. Yth.Bapak Dekan Dr.Sutarman beserta jajarannya di lingkungan FMIPA USU 2. Bapak Dr. Marhaposan Situmorang, selaku Ketua Program Studi Fisika S1
Fakultas Matematika Dan Ilmu Pengetahuan Alam .
3. Ibu Dr.Diana Alemin Barus ,Msc , selkau Ketua Program Studi D-3 Metrologi dan Instrumentasi.
4. Ibu Drs. Ratna Askiah M.Sc, selaku Sekretaris Program Studi D-3 Metrologi dan Instrumentasi Fakultas Matematika Dan Ilmu Pengetahuan Alam.
5. Bapak Drs Takdir Tamba,M.Eng.Sc dan Bapak Drs Kurnia Brahmana M,Sc selaku dosen yang telah memberikan banyak solusi, motivasi dan juga arahan nya.
masukan , saran bahkan waktu yang senantiasa diberikan kepada penulis sampai pada akhir penyelesaian tugas akhir ini.
7. Seluruh Dosen dan Karyawan Program Studi D-3 Metrologi Dan Instrumentasi Departemen Fisika FMIPA USU
8. Kepada Pak De Arifin yang sudah membantu mengerjakan mekanik Tugas akhir penulis dan tidak sungkan-sungkan untuk memberikan masukan motivasi dan bimbingan sampai pada akhir penyelesaian tugas akhir ini.
9. Kepada “the professor” Abang Dwi Budi Prasetyo yang sudah membantu mengerjakan dan meluangkan waktunya untuk mengerjakan tugas akhir ini. Terima kasih atas support, kesabaran, ilmu, motivasi, yang begitu luar biasa kepada abang sampai pada akhir penyelesaian tugas akhir ini.
10.Kepada saudara-saudara seperguruan UKM Robotik SIKONEK USU, Teman– teman seperjuangan yang telah banyak membantu dalam proses pengerjaan tugas akhir ini (Nuril, Faqih, Fadhly, Bobby, Vadhya, Anie, Astrid, Septi, Dian, Nadira, Irfa, Wana, Desi, Rehan, Tiwi).
11.Abang dan kakak senior UKM Robotik SIKONEK (Bang Rhobby, Bang Maizal, Bang Oki, Bang Hamdan, Bang Kharisma, Ibnu, Royansyah,) terima kasih atas dorongan dan kesabaran kalian menghadapi junior kalian yang satu ini.
12.dan kepada semua pihak yang telah berkontribusi dalam kehidupan penulis yang tidak mampu saya tuliskan satu persatu. Jazakumullah khairan katsiran
Penulis menyadari sepenuhnya bahwa dalam pembuatan tugas akhir ini ini masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan saran dari pembaca yang bersifat membangun dalam penyempurnaan tugas akhir ini.
Semoga laporan tugas akhr ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu yang bermanfaat bagi pembaca.
Amin Yaa Rabbal’alamin
Medan, Juli 2014 Penulis,
ABSTRAK
Seiring dengan kemajuan teknologi sekarang ini banyak peralatan elektronik yang sudah dikontrol secara otomatis. Penggunaan sistem Instrumentasi yang dikontrol secara digital ini banyak juga digunakan baik untuk keperluan industri maupun komersial. Dalam penggunaan dan pemanfaatan sistem Instrumentasi ini pekerjaan manusia akan terselesaikan dengan waktu yang cepat, tepat dan akurat. Oleh karena itu manusia diharapkan mampu mengembangkan dan menggali sumber-sumber ilmu yang dapat meningkatkan kinerja perangkat Instrumentasi yang bisa membantu pekerjaan manusia itu sendiri.
Tujuan perancangan dan pembuatan alat pengukur jalan raya ini adalah untuk mempermudah pekerjaan dalam bidang perhitungan serta mengetahui ke akurasian dan ketepatan nilai di suatu Proyek Pengukuran Jalan dan tempat lainnya yang menggunakan sensor optocoupler yang dikendalikan oleh mikrokontroler atmega8 dan ditampilkan melalui LCD. Oleh karena itu sebagai mahasiswa di harapkan dapat merancang sesuatu alat yang dapat bekerja secara sistematis.
DAFTAR ISI
PERSETUJUAN ……….…………. i
PERNYATAAN ………...…………. ii
PENGHARGAAN ………...……….. iii
ABSTRAK ………... v
DAFTAR ISI ……….…... vi
DAFTAR TABEL ………...……... ix
BAB I
PENDAHULUAN
1.1. Latar Belakang ………... 11.2. Rumusan Masalah ………..… 2
1.3. Batasan Masalah ………..….. 2
1.4. Maksud dan tujuan ………...3
1.5.Manfaat………... 4
1.6. Metode Penelitian……...………... 4
BAB II
LANDASAN TEORI
2.1. Sensor optocoupler ………..………. 6
2.1.1 Karakteristik Sensor Opttoocoupler ..………...……… 6
2.1.2 Perinsip Kerja Sensor optocoupler...………...……….……. 8
2.2. MIkrokontroler AVR ATmega8.………... 8
2.2.1 Konfigurasi Pin Yang digunakan ………. 9
2.3 Liquid Crystal Display LCD………....13
2.4 Transistor Sebagai Komparator………...15
BAB III
PERANCANGAN DAN PEMBUATAN SISTEM
3.1 Perancangan Alat ………...………….. 163.2 Gambaran Umum sistem ………...…….. 17
3.3 Rangakaian Mikrokontroler ……..………..……18
3.4. Rangkaian Regulator 5V ………... 20
3.5. Sensor Optocoupler dan transisitor sebagai Comparator ………..20
3.6. Rangkaian LCD…….………...22
BAB IV
PENGUJIAN ALAT
4.1 Pengujian Pengukuran………..……….……. 24
4.2 Data Percobaan ………25
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan ………..………. 295.2 Saran ………..……… 29
DAFTAR PUSTAKA
DAFTAR GAMBAR
Gambar 2.1Rangkaian Dasar Optocoupler ……….. 7Gambar 2.2 ATMega8 ………,……….…………...…… 9
Gambar 2.3 Konfigurasi Pin Atmega 8 ………...……10
ABSTRAK
Seiring dengan kemajuan teknologi sekarang ini banyak peralatan elektronik yang sudah dikontrol secara otomatis. Penggunaan sistem Instrumentasi yang dikontrol secara digital ini banyak juga digunakan baik untuk keperluan industri maupun komersial. Dalam penggunaan dan pemanfaatan sistem Instrumentasi ini pekerjaan manusia akan terselesaikan dengan waktu yang cepat, tepat dan akurat. Oleh karena itu manusia diharapkan mampu mengembangkan dan menggali sumber-sumber ilmu yang dapat meningkatkan kinerja perangkat Instrumentasi yang bisa membantu pekerjaan manusia itu sendiri.
Tujuan perancangan dan pembuatan alat pengukur jalan raya ini adalah untuk mempermudah pekerjaan dalam bidang perhitungan serta mengetahui ke akurasian dan ketepatan nilai di suatu Proyek Pengukuran Jalan dan tempat lainnya yang menggunakan sensor optocoupler yang dikendalikan oleh mikrokontroler atmega8 dan ditampilkan melalui LCD. Oleh karena itu sebagai mahasiswa di harapkan dapat merancang sesuatu alat yang dapat bekerja secara sistematis.
BAB I
PENDAHULUAN
1.1. Latar Belakang
Perkembangan dan kemajuan teknologi yang demikian pesat saat ini, maka telah banyak diciptakannya alat bantu untuk mempermudah dan mempercepat pekerjaan manusia. Alat bantu ini menggunakan system instrumentasi yang banyak di gunakan di berbagai kantor, industri, dinas dan perusahaan khususnya di bidang metrologi dan perusahaan yang bergerak dibidang infrastruktur.
Di berbagai tempat dan dibidang metrologi kita jumpai alat ukur panjang khususnya panjang jalan masih analog dan hasilnya tidak akurat karena masih menggunakan system perhitungan / pengukuran analog. Hal ini tentunya tidak di inginkan dan akan menimbulkan nilai yang berbeda beda setiap melakukan pemeriksaan/ pengukuran di berbagai tempat. masalah ini dapat di atasi dengan membuat alat sistem digital sehingga dengan demikian pada saat pengukuran tidak perlu menunggu, cukup berdiri lalu berjalan ketempat yang mau di ukur panjangdan luasnya kemudian tekan tombol ready maka alat akan bekerja dengan sendirinya dan nilai hasil pengukurannya langsung tertampil di display LCD.
Disini penulis memilih alat ukur panjang jalan sebagai alat yang di kembangkan karena sangat mempermudah dan membantu dalam perhitungan/ pengukuran terhadap panjang jalan, sehingga nilai yang dihasilkan lebih cepat, tepat dan akurat.
1.2. Rumusan Masalah
Dari pembahasan latar belakang masalah uraian yang telah ada maka tugas akhir ini diarahkan pada permasalahan berikut:
1. Bagaimana prinsip kerja dari rangkaian alat ukur panjang jalan.
2. Bagaimana perinsip kerja sensor optocoupler sebagai pengukur jarak.
3. Bagaimana fungsi dari masing - masing komponen utama yaitu, sensor optocoupler, rangkaian penguat op-Amp comparator, LCD dan konfigurasi pin yang digunakan pada mikrokrontroler atmega8, serta komponen pendukung lainnya.
4. Bagaimana merancang dan mengimplementasikan alat pengukur panjang menggunakan sensor optocoupler berbasis atmega8 khusunya dalam bidang metrologi.
1.3. Batasan Masalah
Mengingat keterbatasan waktu dan untuk menghindari topik yang tidak perlu maka penulis membatasi pembahasan pembuatan alat ini. Adapun permasalahan ini adalah :
2. Pengujian dilakukan pada jalan yang tidak berlubang.
3. Pengukuran panjang jalan ditampilkan dalam satuan meter ( m ) dan centimeter.
4. Skala terkecil pada Alat ukur panjang jalan 1 centimeter.
5. Pada rancang bangun alat ukur, sensor yang digunakan berjenis sensor optocoupler tipe U.
1.4. Maksud Dan Tujuan
Adapun maksud dan tujuan penulis melakukan penelitian ini adalah : 1. Sebagai salah satu syarat untuk dapat menyelesaikan Projek Akhir II
pada program Diploma Tiga (D-III) Metrologi Dan Instrumentasi FMIPA Universitas Sumatera Utara.
2. Pengembangan kreatifitas mahasiswa dalam bidang ilmu instrumentasi pengontrolan dan elektronika sebagai bidang diketahui.
3. Untuk mengembangkan fungsi sensor optocoupler dalam bidang instrumentasi.
4. Untuk menambah pengetahuan penulisan dalam membuat dan menganalisa suatu hasil praktek dengan teori ketika membuat alat pengukur panjang jalan.
1.5. Manfaat
Adapun manfaat pembahasan ini adalah :
1. Mempermudah pekerjaan dalam bidang metrologi, dan perusahan yang bergerak di bidang infrastruktur pengukuran khususnya mengukur panjang jalan raya.
2. Meningkatkan efisiensi waktu dalam mengukur panjang jalan secara tepat dan hasil yang akurat.
1.6 Metode Penelitian
Dalam menyelesaikan tugas akhir ini, langkah-langkah yang dilakukan adalah sebagai berikut :
1. Studi Literatur dan Diskusi
Merupakan metode yang dilakukan oleh penulis dengan membaca buku, diskusi dengan dosen pembimbing, mengunjungi dan mempelajari website atau situs-situs yang berhubungan dengan pembuatan alat ukur panjang jalan dan sensor optocoupler
2. Perancangan Konsep
Metode perancangan desain dan bentuk alat ukur yang dilakukan penulis. 3. Pembuatan Alat Ukur
Merupakan proses dalam membuat alat ukurnya. 4. Pengujian Alat ukur
1.6. Sistematika Penulisan
Untuk mempermudah penulisan tugas akhir ini, penulis membuat suatu sistematika penulisan yang terdiri dari :
BAB I: PENDAHULUAN
Bab ini akan membahas latar belakang tugas akhir, identifikasi masalah, batasan masalah, tujuan, metode penelitian, tinjauan pustaka, dan sistematika penulisan.
BAB II: LANDASAN TEORI
Bab ini akan menjelaskan tentang teori pendukung yang digunakan untuk pembahasan.
BAB III: PERANCANGAN DAN SISTEM KERJA RANGKAIAN
Bab ini membahas tentang perencanaan dan pembuatan sistem secara keseluruhan.
BAB IV: PENGUJIAN RANGKAIAN
Berisi tentang uji coba alat yang telah dibuat, pengoperasian dan spesifikasi alat dan lain-lain.
BAB V: PENUTUP
BAB II
LANDASAN TEORI
2.1. Sensor Optocoupler
Optocoupler adalah suatu piranti yang terdiri dari 2 bagian yaitu transmitter
dan receiver, yaitu antara bagian cahaya dengan bagian deteksi sumber cahaya terpisah. Biasanya optocoupler digunakan sebagai saklar elektrik, yang bekerja secara otomatis. Optocoupler adalah suatu komponen penghubung (coupling) yang bekerja berdasarkan picu cahaya optic.
Optocoupler terdiri dari dua bagian yaitu :
• Pada transmitter dibangun dari sebuah LED infra merah. Jika dibandingkan dengan menggunakan LED biasa, LED inframerah memiliki ketahanan yang lebih baik terhadap sinyal tampak. Cahaya yang dipancarkan oleh LED inframerah tidak terlihat oleh mata telanjang.
• Pada bagian receiver dibangun dengan dasar komponen phototransistor. Phototransistor merupakan suatu transistor yang peka terhadap tenaga cahaya. Suatu sumber cahaya menghasilkan energi panas, begitu pula dengan spektrum infra merah. Karena spekrum infra mempunyai efek panas yang lebih besar dari cahaya tampak, maka photodioda lebih peka untuk menangkap radiasi dari sinar infra merah.
2.2.1 Karakteristik Sensor Optocoupler
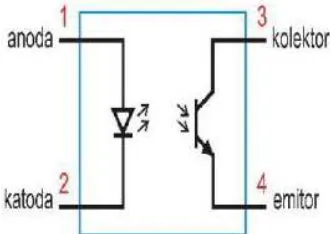
Sehingga bisa diartikan bahwa optocoupler merupakan suatu komponen yang bekerja berdasarkan picu cahaya optic opto-coupler termasuk dalam sensor, dimana terdiri dari dua bagian yaitu transmitter dan receiver. Dasar rangkaian dapat ditunjukkan seperti pada gambar dibawah ini :
Gambar 1.1 Rangkaian Dasar Optocoupler
LED infra merah ini merupakan komponen elektronika yang memancarkan cahaya infra merah dengan konsumsi daya sangat kecil. Jika diberi prasikap maju, LED infra merah yang terdapat pada optocoupler akan mengeluarkan panjang gelombang sekitar 0,9 mikrometer. Photodioda memiliki sambungan kolektor– basis yang besar dengan cahaya infra merah, karena cahaya ini dapat membangkitkan pasangan lubang elektron. Dengan diberi prasikap maju, cahaya yang masuk akan menimbulkan arus pada kolektor. Photodioda memiliki bahan utama yaitu germanium atau silikon yang sama dengan bahan pembuat transistor. Tipe Photodioda juga sama dengan transistor pada umumnya yaitu PNP dan NPN. Perbedaan transistor dengan Photodioda hanya terletak pada rumahnya yang memungkinkan cahaya infra merah mengaktifkan daerah basis, sedangkan transistor biasa ditempatkan pada rumah logam yang tertutup.
2.2.2 Prinsip Kerja Sensor Optocoupler
Jika antara photodioda dan LED terhalang maka photodioda tersebut akan off sehingga output dari kolektor akan berlogika high. Sebaliknya jika antara phototransistor dan LED tidak terhalang maka phototransistor dan LED tidak terhalang maka phototransistor tersebut akan on sehingga output-nya akan berlogika low. Ditinjau dari penggunaanya, fisik optocoupler dapat berbentuk bermacam-macam. Bila hanya digunakan untuk mengisolasi level tegangan atau data pada sisi transmitter dan sisi receiver, maka optocoupler ini biasanya dibuat dalam bentuk solid ( tidak ada ruang antara LED dan phototransistor ). Sehingga sinyal listrik yang ada pada input dan otput akan terisolasi. Dengan kata lain optocoupler ini digunakan sebagai optoisolator jenis IC.
2.2. Mikrokontroler AVR Atmega8
Atmel AVR adalah jenis bidang Reduce Instruction Set Computing) delapan bit, di mana semua instruksi dikemas dalam kode 16-bit (16 bits word) dan sebagian besar instruksi dieksekusi dalam 1 (satu ) siklus clock.
menggunakan oscillator eksternal karena di dalamnya sudah terdapat internal
oscillator. Selain itu kelebihan dari AVR adalah memiliki Power-On Reset, yaitu tidak perlu ada tombol reset dari luar karena cukup hanya dengan mematikan
supply, maka secara otomatis AVR akan melakukan reset. Untuk beberapa jenis AVR terdapat beberapa fungsi khusus seperti ADC, EEPROM sekitar 128 byte
sampai dengan 512 byte.
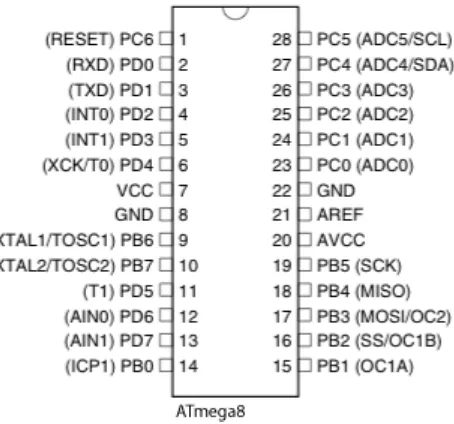
Gambar 2.2. Atmega8
AVR ATmega8 adalah mikrokontroler 8-bit berarsitektur AVR RISC yang memiliki 8K byte in-System Programmable Flash. Mikrokontroler dengan konsumsi daya rendah ini mampu mengeksekusi instruksi dengan kecepatan maksimum 16MIPS (million of instuctions per second) pada frekuensi 16MHz. ATmega8 hanya dapat bekerja pada tegangan antara 4,5 – 5,5 V.
2.2.1. Konfigurasi Pin Atmega8 Yang Digunakan
Pada ATmega8 memiliki 28 Pin, yang masing-masing pin nya memiliki fungsi yang berbeda-beda baik sebagai port maupun fungsi yang lainnya. Berikut akan dijelaskan fungsi dari masing-masing kaki :
a. AVCC
Merupakan ground untuk semua komponen yang membutuhkan grounding. c. Port B (PB7...PB0)
Gambar 2.3. Konfigurasi Pin Atmega8
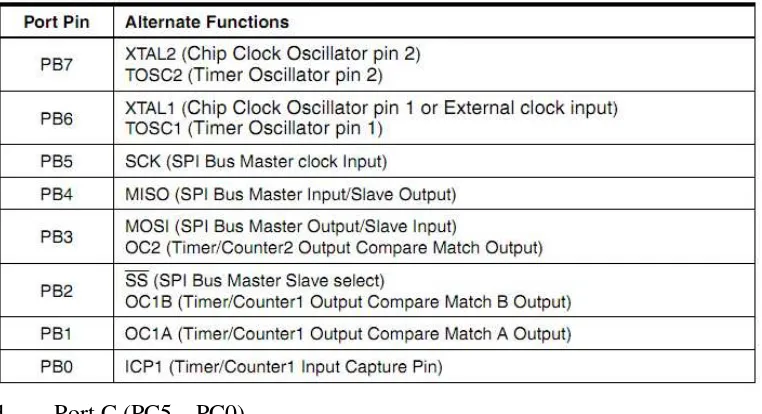
Didalam Port B terdapat XTAL1, XTAL2, TOSC1, TOSC2. Jumlah Port B adalah 8 buah pin, mulai dari pin B.0 sampai dengan B.7. Tiap pin dapat digunakan sebagai input maupun output. Port B merupakan sebuah 8-bit bi-directional I/O dengan internal pull-up resistor. Sebagai input, pin-pin yang terdapat pada port B yang secara eksternal diturunkan, maka akan mengeluarkan arus jika pull-up
digunakan sebagai I/O atau jika menggunakan maka PB6 dan PB7 (TOSC2 dan TOSC1) digunakan untuk saluran input timer.
Tabel 2.1. Fungsi Alternatif Port B
d. Port C (PC5…PC0)
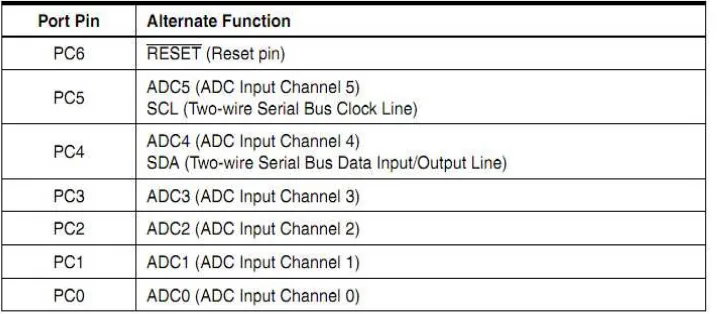
Port C merupakan sebuah 7-bit bi-directional I/O port yang di dalam masing-masing pin terdapat pull-up resistor. Jumlah pin nya hanya 7 buah mulai dari pin C.0 sampai dengan pin C.6. Sebagai keluaran/output port C memiliki karakteristik yang sama dalam hal menyerap arus (sink) ataupun mengeluarkan arus (source). ADC 6 channel (PC0,PC1,PC2,PC3,PC4,PC5) dengan resolusi sebesar 10bit. ADC dapat kita gunakan untuk mengubah input yang berupa tegangan analog menjadi data digital. I2C (SDA dan SDL) merupakan salah satu fitur yang terdapat pada PORTC. I2C digunakan untuk komunikasi dengan sensor atau device lain yang memiliki komunikasi data tipe I2C seperti sensor kompas,
accelerometer nunchuck, dll. e. RESET/PC6
port C lainnya. Namun jika RSTDISBL Fuse tidak diprogram, maka pin ini akan berfungsi sebagai input reset. Dan jika level tegangan yang masuk ke pin ini rendah dan pulsa yang ada lebih pendek dari pulsa minimum, maka akan menghasilkan suatu kondisi reset meskipun clock-nya tidak bekerja. RESET merupakan salah satu pin penting di mikrokontroler, RESET dapat digunakan untuk merestart program. Pada ATMega8 pin RESET digabungkan dengan salah satu pin IO (PC6). Secara default PC6 ini di disable dan diganti menjadi pin RESET. Kita dapat melakukan konfigurasi di fusebit untuk melakukan pengaturannya.
Tabel 2.2. Fungsi Alternatif Port C
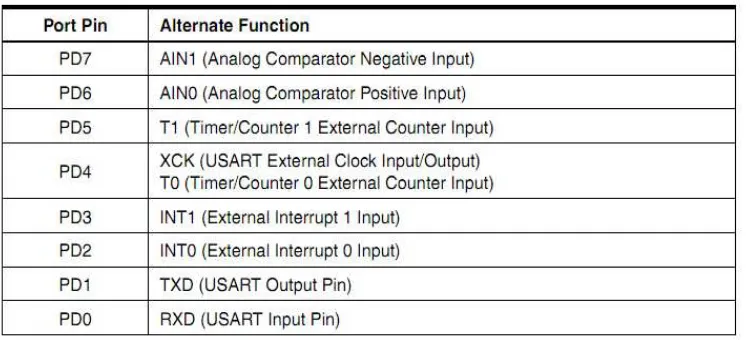
f. Port D (PD7…PD0)
Tabel 2.3. Fungsi Alternatif Port D
g. USART (TXD dan RXD) merupakan jalur data komunikasi serial dengan level sinyal TTL. Pin TXD berfungsi untuk mengirimkan data serial, sedangkan RXD kebalikannya yaitu sebagai pin yang berfungsi untuk menerima data serial. Interrupt (INT0 dan INT1) merupakan pin dengan fungsi khusus sebagai interupsi
hardware. Interupsi biasanya digunakan sebagai selaan dari program, misalkan pada saat program berjalan kemudian terjadi interupsi hardware/software maka program utama akan berhenti dan akan menjalankan program interupsi. XCK dapat difungsikan sebagai sumber clock external untuk USART, namun kita juga dapat memanfaatkan clock dari CPU, sehingga tidak perlu membutuhkan external clock. T0 dan T1 berfungsi sebagai masukan counter external untuk timer 1 dan timer 0. AIN0 dan AIN1 keduanya merupakan masukan input untuk analog comparator.
2.2 Liquid Crystal Display (LCD)
memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau mentransmisikan cahaya dari back-lit.
Gambar 2.4 Liquid Crystal Display (LCD) Character 2x16
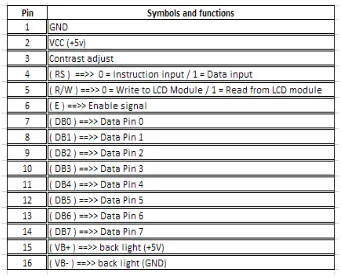
LCD (Liquid Cristal Display) berfungsi sebagai penampil data baik dalam bentuk karakter, huruf, angka ataupun grafik.Material LCD (Liquid Cristal Display) LCD adalah lapisan dari campuran organik antara lapisan kaca bening dengan elektroda transparan indium oksida dalam bentuk tampilan seven-segment dan lapisan elektroda pada kaca belakang.
Tabel 2.4 pin –pin konfigurasi pada LCD
2.5 Transistor Sebagai Komparator
Komparator adalah rangkaian elektronika yang berfungsi membandingkan dua nilai tegangan kemudian menentukan hasil tegangan keluarannyanya, mana yang lebih besar dan mana yang lebih kecil. Komparator bisa rangkai menggunakan satu buah transistor yang pada pin basis nya terpasang resistor variable, dimana resisitor variabel ini berfungsi sebagai pembagi tegangan yang di terima dari optocoupler. Tegangan yang melewati tegangan lutut (0,7 volt) pad pin basis akan menghasilkan tegangan keluaran pada transistor mendekati dengan tegangan Vcc, sedangan tegangan yang berada dibawah tegangan lutut akan menghasilkan tegangan keluaran pada transistor mendekati dengan tegangan 0 volt.
BAB III
PERANCANGAN ALAT DAN PEMBUATAN SISTEM
3.1. Perancangan alat
Perancangan mekanik alat ukur panjang jalan ini, menggunakan beberapa peralatan dan bahan juga komponen, yaitu :
A. Peralatan Dan Bahan Untuk Mekanik Alat Ukur Panjang Jalan :
No. Peralatan No. Bahan
1. Bor duduk dan mata bor 1. Akrilik
2. Mesin Las 2. Ban Sepeda anak – anak , diameter 20 Cm
3. Mesin Bubut 3. Lem Dexton
4. Obeng + dan – 4. Besi strip 30 Cm
5. Grgaji Besi 5. Besi Pipa 150 Cm
6. Palu/Martil 6. Karet Grip Motor
7. Mesin Gerinda 7. Pylox Black Flat
8. Tang Jepit, Potong, 8. Kertas Pasir
9. Glue gun 9 Plat Almunium
B. Peralatan Dan Bahan Untuk Komponen Sistim Minimum
No. Peralatan No. Bahan
1. Solder 1. Atmega8 + soket
2. Tang jepit 2. Resistor
3. Tang potong 3. Capasitor bi polar dan nonpolar
5. Grgaji Besi 5. Crystal 12Mhz
6. Penyedot timah 6. Trimpot
7. Pisau cutter 7. Diode kuprok
8. FeCl3 Feroclorida (racun PCB) 8. Timah solder
9. Papan PCB 9. Timah solder
10. Kertas Pasir 10. Kabel jumper
11. 11. Transistor
3.2 Gambaran Umum Sistem
Diagram merupakan pernyataan hubungan yang berurutan dari suatu atau lebih komponen yang memiliki kesatuan kerja tersendiri, dan setiap blok komponen mempengaruhi komponen yang lainnya. Diagram blok merupakan salah satu cara yang paling sederhana untuk menjelaskan cara kerja dari suatu sistem. Dengan diagram blok kita dapat menganalisa cara kerja rangkaian dan merancang hardware yang akan dibuat secara umum. Pada Gambar 3.1 Sistem yang akan dirancang menggunakan mikrokontroler AVR ATMega8 sebagai pengendali semua rangkaian system. Sensor optocoupler mendeteksi adanya beda pada tegangan yang terjadi akibat piringan tipis yang menghalangi.
optocoupler berlogika 1 (satu) yaitu 2,4 – 5 V maka transistor akan menarik tegangan brada pada posisi di Ditinjau dari penggunaanya, fisik optocoupler dapat berbentuk bermacam-macam. Bila hanya digunakan untuk mengisolasi level tegangan atau data pada sisi transmitter dan sisi receiver, maka optocoupler ini biasanya dibuat dalam bentuk solid ( tidak ada ruang antara LED dan photodioda ). Sehingga sinyal listrik yang ada pada input dan otput akan terisolasi. Dengan kata lain optocoupler ini digunakan sebagai optoisolator jenis IC. Adapun diagram blok dari sistem yang dirancang, seperti yang diperlihatkan pada gambar 3.1
Gambar 3.1. Diagram Blok Sistem
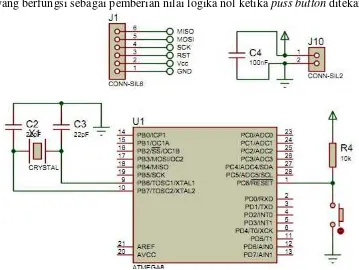
3.3 Rangkaian Mikrokontroler ATMega8
Gambar 3.2 menunjukkan rangkaian mikrokontroler ATMega8. Rangkaian sistem minimum mikrokontroler ATMega8 terdiri dari mikrokontroler ATMega8, Crystal 12Mhz, Kapasitor non polar, kapasitor bipolar, resisitor dan IC7805.Pada Port B6 Dan 7 di hubungkan dengan crystal dan dua buah kapasitor. Rangkaian crystal sebagai pencatu clock dan rangkaian aktif low sebagai button reset.
Rangkaian crystal pada mikrokontroler ATMega8 berfungsi sebagai sumber
clock bagi mikrokontroler. Clock didapat dari osilator kristal dengan frekuensi 12 MHz.
Rangkaian reset pada Port C6 pada mikrokontroler ATMega8 berfungsi untuk mengembalikan kondisi mikrokontroler ke dalam keadaan semula (default).
SENSOR OPTOCOUPLER
Timer / Counter
Mikrokontroler TAMPILAN LCD Transistor
Rangkaian reset terdiri dari resistor 10 K(R4). Ketika catudaya dihidupkan, pin reset harus terhubung dengan logika 1, dikarenakan pin reset bekerja ketika mendapat logika l (akitif low), maka oleh karena itu pin reset di hubungkan menggunakan resistor pull up yang bernilai 10K atau resistor yang terhubung dengan VCC (+5V) dan pin reset terhubung juga ke ground melalui puss button
[image:30.595.112.471.227.497.2]yang berfungsi sebagai pemberian nilai logika nol ketika puss button ditekan.
Gambar 3.2 Rangkaian Mikrokontroler AVR ATMega 8
Tabel 3.1 Spesifikasi PORT/Bandar yang Digunakan
PORT/ Bandar
Pin Fungsi
B
0 Hubungan ke LCD
[image:30.595.106.517.588.747.2]C 6 Button RST (Reset)
D
1,2,3,4 Hubungkan LCD 6,7 Hubungkan LCD 5 Timer or counter 1
3.4 Rangkaian Regulator 5V
Pada gambar 3.3 Rangkaian regulator digunakan untuk menghasilkan tegangan 5V yang menggunakan sebuah IC 7805 dan tiga buah kapasitor. Pada rangkaian ini, berapapun arus AC yang masuk pada pin 7805 akan dikonversikan menjadi tegangan output DC 5V.
[image:31.595.128.482.389.512.2]
Gambar 3.3 Rangkaian Regulator
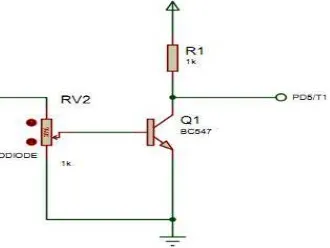
3.5 Sensor Optocoupler dan Transistor sebagai comparator
mengalami 2 siklus, yang pertama ketika terkena cahaya led secara langsung, dankondisi kedua tidak terkena cahaya led, diakibatkan karena posisi piringan memiliki desain tertutup dan tidak tertutup, kemudian tegangan pada potodioda yang terjadi berulang2 inilah yang nantinya akan dibaca untuk perhitungan counter, tetapi tegangan yangg dihasil kan pin pada potodioda tidak memberikan criteria logika 1 dan logika/0, oleh karena itu dibutuhkan sebuah komparator, yang menggunakan sebuah transistor dan komponen2 lainnya untuk menetukan nilai logika nol dan logika 1, dimana jika potodioda mendapat cahaya langsung dari led, maka tegangan yang terbaca akan melalui trimpot RV2 dan trimpot ini prosesnya membagi tegangan sehingga tegangan yang jatuh pada potodioda akan diberikan ke basis dari transistor , jika tegangan dibawah ambang batas (0,7V) maka tegangan keluaran pada komparator akan dibawa jauh sejauh hingga 0 volt atau logika 0, jika tegangan melebihi dari pada 0,7 volt pada pin basis transistor maka tegangan keluaran pada komparator akan diibawa sejauh mungkin ke tegangan 5volt atau berlogika 1.Siklus ini yang akan terjadi terus menerus ketika piringan diputar terus menerus sehingga menjadikan hasil pulsa yg terbaca untuk setiap centimeter.
3.6 Rangkaian LCD
Pada gambar 3.5 LCD berfungsi sebagai penampil hasil pengukuran berupa karakter. Dari gambar dibawah port yang dipakai untuk menghubungkan LCD dengan mikrokontroler adalah PORTB Bit 0, PORT D Bit 1, PORT D Bit 2, PORT D Bit 3, PORT D Bit 4, PORT D Bit 6, PORT D Bit 7.
3.7 Diagram Alir (Flowchart) alat ukur panjang jalan.
Gambar 3.7. Flowchart Cara Kerja Sistem
Keterangan : Pada proses clock timer, mikrokontroler akan membaca pulsa yang terjadi pada pin counternya yang diberikan oleh sensor optocoupler dengan sinyal 1/0 yang dibaca oleh clock counter, sinyal yang terbaca akan ditampilkan dalam bentuk satuan meter dan centimeter, kemudian setelah menampilkan hasil , dilakukan lagi proses clock timer dimana proses clock timer, menghitung kembali berapa nilai counter yang di simpan saat ini, kemudian baca lagi clocknya berapa kali clok yang terjadi pada counter, kemudian dilakukan lagi proses clock timer secara berkala secara terus menerus. Jadi nilai tidak pernah kembali ke nilai nol.
Baca Clock Counter
Tampilan Hasil Pembacaan Counter Dalam satuan meter
Start
BAB IV
PENGUJIAN ALAT DAN RANGKAIAN
4.1 Pengujian Pengukuran Panjang Jalan dengan Alat Standar.
Pengujian pengukuran dilakukan terhadap beberapa sampel, dimana hasil pengukuran yang terbaca berupa prubahan nilai tegangan. Nilai tegangan yang terbaca akan dikonversikan menjadi logika 0/1 dan logika ini akan di hitung menggunakan pencacah yg terdapat pada mikrokontroler, kemudian nilai counter tersebut akan dikonversikan menjadi satuan jarak dalam satuan meter dan centimeter. Pengujian ini dilakukan di :
Tempat : Jalan Masuk Gedung Pusdiklat LPPM USU Medan Tanggal : 18 Juli 2014
Waktu / Pukul : 10.00 – 11.00 WIB
Pengujian dilakukan dengan metode pengukuran langsung dari suatu titik yang diukur ke titik akhir dengan membandingkan nilai pada standar dengan penunjukan pada alat ukur yang akan diuji. Standar berupa meteran gulung standar dengan ketelitian hingga 1 centimeter dan maximal pengukuran sampai 20 meter. Pengujian pengukuran dilakukan sebanyak 5 kali pengulangan pengukuran di setiap intervalnya.
4.2 Data Percobaan
Tabel 4.1 Data Hasil Pengukuran pada jarak 5 meter.
Percobaan Ke - Pada Jarak standar 5 meter (m)
Pembacaan alat dalam satuan
centimeter
(cm) meter (m)
1 501 5
2 502 5
3 504 5
4 503 5
5 505 5
[image:36.595.108.420.366.487.2]Rata - rata hasil pengukuran 503 5
Grafik 4.1 Hasil pengukuran alat dalam satuan centimeter pada jarak 5 meter
Tabel 4.2 Data Hasil Pengukuran pada jarak 10 meter.
Percobaan Ke - Pada Jarak standar 10 meter (m)
Pembacaan alat dalam satuan
centimeter (cm)
meter (m)
1 1009 10
2 1009 10
3 1007 10
4 1009 10
5 1005 10
Rata - rata hasil pengukuran 1007.8 10
500 505 510
0 1 2 3 4 5 6
[image:36.595.106.382.551.707.2]Grafik 4.2 Hasil pengukuran alat dalam satuan centimeter pada jarak 10 meter
Tabel 4.3 Data Hasil Pengukuran pada jarak 15 meter.
Percobaan Ke - Pada Jarak standar 15 meter (m)
Pembacaan alat dalam satuan
centimeter (cm)
meter (m)
1 1510 15
2 1513 15
3 1511 15
4 1506 15
5 1513 15
Rata - rata hasil pengukuran 1510.6 15
Grafik 4.3 Hasil pengukuran alat dalam satuan centimeter pada jarak 15 meter
1004 1006 1008 1010
0 1 2 3 4 5 6
Pembacaan alat dalam satuan
centimeter (cm)
1505 1510 1515
0 1 2 3 4 5 6
[image:37.595.111.412.544.685.2]Tabel 4.4 Data Hasil Pengukuran pada jarak 20 meter.
Percobaan Ke - Pada Jarak standar 20 meter (m)
Pembacaan alat dalam satuan
centimeter (cm)
meter (m)
1 2011 15
2 2010 15
3 2010 15
4 2014 15
5 2014 15
Rata - rata hasil pengukuran 2011.8 15
Grafik 4.4 Hasil pengukuran alat dalam satuan centimeter pada jarak 20 meter
• Persentase kesalahan pada pengukuran dalam satuan centimeter pada setiap interval nya yaitu :
% ������ℎ������������=
���� − ������������ℎ���������������������������� − �����������
���� − ������������ℎ�������������� � 100%
• Pada Satuan centimeter 1. Pada jarak 500 centimeter
% kesalahan =503−500
503 � 100% = 0,69 %
2008 2010 2012 2014 2016
0 1 2 3 4 5 6
[image:38.595.106.416.324.467.2]2. Pada jarak 1000 centimeter % kesalahan = 1007 ,8−1000
1007 ,8 � 100% = 0,77 %
3. Pada jarak 1500 centimeter % kesalahan = 1510 .6−1500
1510 .6 � 100% = 0,7 %
4. Pada jarak 2000 centimeter % kesalahan = 2011 .8−2000
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
1. Hasil pengukuran menunjukkan rata - rata pada interval jarak 5, 10, 15 dan 20 meter , untuk satuan centimeter kesalahan rata - rata pada setiap interval tidak lebih dari 1%.
2. Batas minimal pengukuran hanya mencapai ketelitian 1 centimeter pada alat uji.
3. Alat uji yang dirancang dapat mengukur hingga jarak maksimal 1km.
5.2 Saran
1. Disarankan alat uji ini dikembangkan menggunakan GPS (global position system)
2. Untuk perancangan alat berikkutnya disarankan untuk mnggunkan optocoupler hingga ketelitian minimal 1 angka diblakang koma.
DAFTAR PUSATAKA
Tarigan, Pernantin. 2011. Sistem Tertanam (Embedded System). Graha Ilmu. Yogyakarta.
http://Applikasi_Sensor.Optocoupler_Pada_Kendaraan_Hybird _satriodamar's.html Diakses pada tanggal 18 juni 2014
Diakses pada tanggal 18 juni 2014
Diakses pada tanggal 18 juni 2014
Diakses pada tanggal 18 juni 2014
Diakses pada tanggal 18 juni 2014 http://optocoupler _ Jaenal91'sBlog.html
Diakses pada tanggal 18 juni 2014 http://sensor optocoupler _ vendra.html