BERBASIS SISTEM PENGENALAN UCAPAN
Diajukan sebagai salah satu syarat menempuh ujian Sarjana Strata 1 (S1)
pada program studi Teknik Elektro
Disusun Oleh :
FERI FIRDIAN
1.31.06.012
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
i
Pada tugas akhir ini dirancang sebuah prototype elevator yang dikontrol tidak hanya menggunakan tombol tapi juga menggunakan input dari suara manusia. Alat ini terdiri dari empat buah sensor optocoupler sebagai pendeteksi lantai dan motor dc sebagai penggerak sedangkan untuk input suara manusia diberikan melalui mikrofon yang diolah pada komputer melalui proses pengenalan ucapan menggunakan software bantuan yaitu Microsoft SDK SAPI 5.1. Untuk antar muka pada komputer digunakan Microsoft Visual Basic 6.0 dan proses pengolahan data sebagai penentu pergerakan dari motor dc dilakukan pada mikrokontroler ATmega 8535 menggunakan bahasa C.
Dari hasil pengujian terhadap kinerja sistem pengenalan dalam keadaan tenang mencapai 87,5% dan pada keadaan penuh derau kinerja pengenalan ucapan menjadi 77,5 %
ii
In this final task designed a prototype of elevator that is not only controlled by a push button but also controllerd by the input from the human voice. This device consists of four optocoupler sensors as floor detection and a dc motor as the driver, while for the human voice input given through the microphone are processed on a computer through speech recognition software using Microsoft SAPI SDK 5.1. For the interface on the computer used the Microsoft Visual Basic 6.0 and the data processing as a determinant of the movement of a dc motor made on microcontroller Atmega 8535 using C language
The results show on the performance of recognition systems in a state of calm reached 87.5% and in a state full of noisy speech recognition performance to 77.5%
iii
Dengan menyebut nama Allah Yang Maha Pengasih lagi Maha Penyayang, puji dan syukur penulis panjatkan kehadirat Allah Subhannahu Wata’ala yang telah melimpahkan rahmat serta hidayah-Nya kepada penulis, sehingga penulis dapat menyelesaikan tugas akhir yang diberi judul ”Pengontrolan Elevator Berbasis Sistem Pengenalan Ucapan”. Adapun maksud dari penyusunan tugas akhir ini adalah bertujuan untuk menyelesaikan studi program S1 dan merupakan salah satu syarat dalam menempuh ujian sarjana di jurusan Teknik Elektro Universitas Komputer Indonesia (UNIKOM) Bandung.
Penulis menyadari bahwa tugas akhir ini masih jauh dari kata sempurna, dikarenakan keterbatasan penulis, baik dalam penyajian materi, maupun dalam sistematika penulisan, sumber bacaan, pengetahuan dan pengalaman penulis. Walaupun demikian, penulis telah berusaha dan mencoba memberikan karya tulis yang bermanfaat bagi penulis khususnya dan bagi pembaca umumnya.
Pada kesempatan ini, tidak lupa penulis ucapkan terimakasih kepada semua pihak yang telah membantu kelancaran dalam penyelesaian laporan ini, terutama kepada :
1. Kedua Orang Tuaku dan seluruh Keluarga Besarku serta Saudara-saudaraku yang kucintai Yadi K dan istrinya, Ade Herdi R, Lita Z, dan adik kecilku Sukma Dewisari yang selalu memberikan dorongan moril dan materi serta do’a kepada penulis selama mengikuti perkuliahan di UNIKOM Bandung.
2. Bapak Dr. Ir. Eddy Suryanto Soegoto, M.Sc sebagai Rektor UNIKOM Bandung.
iv
5. Ibu Tri Rahajoeningroem, MT sebagai Koordinator Tugas Akhir Program Studi Teknik Elektro UNIKOM Bandung.
6. Bapak Riyanto, MT yang senantiasa memberikan pengarahan dan masukan kepada penulis dalam menyelesaikan tugas akhir ini.
7. Bapak dan Ibu Dosen Jurusan Teknik Elektro UNIKOM Bandung yang telah membekali ilmu pengetahuan kepada penulis selama menuntut ilmu di UNIKOM Bandung.
8. Ibu Mery selaku sekretaris Jurusan Program Studi Teknik Elektro UNIKOM Bandung.
9. Para Sahabat Eceng Gondok Community: Agah, Iip, Rudi R, Agung, Hanra, Yuga, Arief dan Wida yang bersama-sama menyelesaikan tugas akhir ini.
10. Rekan-rekan seperjuangan Dede, Angga, Hilman, Indra, Jafar Juprie, Jafar Sidik, Zakir, Dublin Uhuy, Rudi Bob, Rahmat M.Y, Bayu, Mulyana, Bobi H, Agus N dan yang lainnya yang telah banyak membantu.
11. Saudara-saudaraku di JEDA’Z , SIXNESS dan “00” Community yang senantiasa memberikan motivasi kepada penulis.
Akhir kata dengan kerendahan hati, penulis memanjatkan do’a kehadirat Allah Subhanahu Wata’ala semoga amal dan baik budi yang telah mereka berikan kepada penulis mendapat pahala dari-Nya. Amin.
Bandung, Agustus 2011
1 1.1 Latar Belakang
Kemajuan teknologi dalam bidang Pengolahan Sinyal Digital (Digital Signal Processing) telah membawa dampak positif dalam kehidupan manusia. Salah satu disiplin ilmu dalam pengolahan sinyal digital yang memberikan
dampak yang cukup besar ialah bidang pengolahan suara digital. Pengolahan
suara digital dapat dikembangkan menjadi berbagai aplikasi yang dapat
mempermudah kehidupan manusia. Salah satu aplikasi yang dapat dibuat ialah
aplikasi untuk pengontrolan elevator. Dalam proses pengontrolan elevator ini,
sistem pengolahan suara digital dapat digunakan untuk mengenali suara masukan
dan memberikan suatu keputusan tentang arti dari ucapan tersebut. Proses ini
sering disebut dengan proses pengenalan ucapan.
Selama ini, jika ingin menjalankan sebuah elevator perlu dilakukan
penekanan suatu tombol. Hal ini menjadi tidak efektif jika ingin menjalankan
elevator masih dengan sistem manual apalagi bila kita menderita cacat fisik
seperti patah tulang lengan. Tentu saja hal tersebut akan membuang waktu dan
tenaga untuk menjalankan elevator tersebut. Oleh karena itu perlu dikembangkan
suatu sistem yang dapat menjalankan sebuah elevator melalui ucapan.
Dalam Tugas Akhir ini dibuat sebuah aplikasi untuk pengontrol elevator
dengan menggunakan masukan berupa suara dan menghasilkan keluaran yang
1.2 Tujuan Tugas Akhir
Tujuan Tugas Akhir “Pengontrolan Elevator Berbasis Sistem Pengenalan
Ucapan” ini adalah sebagai berikut:
1. Membuat suatu prototype pengontrolan elevator menggunakan sistem
pengenalan ucapan (Speech Recognition),
2. Memberikan variasi pilihan tambahan dalam melakukan pengontrolan
sebuah elevator,
1.3 Rumusan Masalah
Pengenalan suara merupakan salah satu upaya agar suara dapat dikenali
atau diidentifikasi sehingga dapat dimanfaatkan, maka dalam penelitian ini,
pengenalan suara akan diterapkan pada pengontrolan sebuah elevator, dengan cara
merancang dan mensimulasikan pengontrol elevator berbasis sistem pengenalan
suara menggunakan perangkat lunak komputer serta mengkaji kinerjanya.
Selanjutnya, hasil dari pengkajian tersebut akan diterapkan pada sistem untuk
proses pengendalian simulasi sistem elevator dengan target dapat mempermudah
dalam pengontrolan elevator.
1.4 Batasan Masalah
Batasan masalah yang digunakan untuk memperjelas ruang lingkup dari
Tugas Akhir “Pengontrolan Elevator Berbasis Sistem Pengenalan Ucapan” ini
1. Proses pengenalan ucapan menggunakan software bantuan yaitu: Speech Aplication Programming Interface 5.1 (SAPI 5.1) dan Microsoft Visual Basic 6.0,
2. Proses pengontrolan motor dc menggunakan mikrokontroler ATMega
8535
1.5 Metode Penelitian
Metode penelitian yang digunakan dalam penyusunan tugas akhir ini
adalah:
1. Studi pustaka yang berhubungan dengan sistem pengenalan ucapan
(Speech Recognition),
2. Merancang program simulasi sistem elevator,
3. Membuat perancangan sistem pengenalan ucapan dalam beberapa struktur,
serta membuat program simulasi dari setiap struktur,
4. Melakukan proses simulasi serta melakukan penalaran
parameter-parameter,
5. Mengulang langkah 3 dan 4 hingga diperoleh hasil optimal,
6. Hasil konfigurasi yang optimal berdasarkan langkah 5 akan diterapkan
pada sistem,
7. Melakukan analisa hasil penelitian.
1.6 Sistematika Penulisan
Pembahasan laporan Tugas Akhir ini terdiri dari 5 bab dengan perincian
BAB I PENDAHULUAN
Menguraikan tentang latar belakang, tujuan tugas akhir, rumusan
masalah, batasan masalah, metode penelitian, dan sistematika penulisan
BAB II DASAR TEORI
Membahas landasan teori mengenai pengenalan ucapan, Speech
Aplication Programming Interface 5.1 (SAPI 5.1), Microsoft Visual Basic 6.0
(VB 6.0), CodeVisionAVR dan ATMega 8535
BAB III PERANCANGAN SISTEM
Berisi perancangan dan penjelasan terhadap sistem pengenalan ucapan
yang dikembangkan, meliputi arsitektur dan deskripsi sistem.
BAB IV EKSPERIMEN DAN EVALUASI
Berisi penjelasan mengenai eksperimen yang dilakukan meliputi tujuan
eksperimen, skenario eksperimen, dan hasil eksperimen yang dilengkapi dengan
pembahasannya.
BAB V PENUTUP
Berisi kesimpulan yang dapat diambil dari pelaksanaan tugas akhir ini
5 2.1 Pengenalan Ucapan
Sistem Pengenalan Ucapan (Speech Recognition Sistem) adalah sistem yang berfungsi untuk mengubah bahasa lisan menjadi bahasa tulisan. Masukan sistem adalah ucapan manusia, selanjutnya sistem akan mengidentifikasikan kata atau kalimat yang diucapkan dan menghasilkan teks yang sesuai dengan apa yang diucapkan. Sinyal ucapan pertama kali akan dilewatkan pada bagian penganalisis ucapan untuk mendapatkan besaran-besaran atau ciri-ciri yang mudah diolah pada tahap berikutnya. Untuk setiap ucapan yang berbeda akan dihasilkan pola ciri yang berbeda
dan lebih mudah dilatih, tetapi tidak dapat mengenal kata yang berada di luar kosa kata yang pernah diajarkan.
Ada 2 tipe Speech Recognition, dilihat dari ketergantungan pembicara yaitu:
a. Independent Speech Recognition, yaitu sistem pengenal ucapan tanpa terpengaruh dengan siapa yang berbicara, tetapi mempunyai keterbatasan dalam jumlah kosakata. Model ini akan mencocokan setiap ucapan dengan kata yang dikenali dan memilih yang ”sepertinya” cocok. Untuk mendapatkan kecocokan kata yang diucapkan maka digunakan model statistic yang dikenal dengan nama
Hidden Markov Model(HMM)
b. Dependent Speech Recognition, yaitu sistem pengenal ucapan yang memerlukan pelatihan khusus dari pembicara, dimana hasil pelatihan dari masing-masing pembicara akan disimpan dalam sebuah profil. Profil inilah yang nantinya digunakan untuk berinteraksi dengan sistem pengenal ucapan dan sistem akan bergantung siapa yang berbicara. Sistem ini biasanya lebih mudah untuk dikembangkan, dimana contoh suara sudah dibuat sebelumnya dan disimpan dalam database (basis data) dan jumlah kosakatanya lebih besar dibandingkan dengan independent speech recognition. Proses pengenalan ucapan dengan cara membandingkan ucapan pembicara dengan contoh suara yang sudah ada.
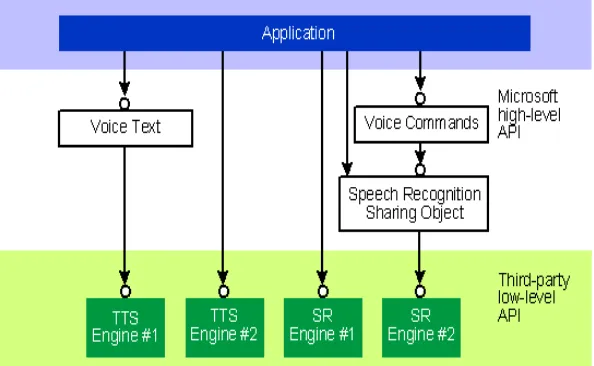
2.2 Microsoft SAPI 5.1
dikemas baik berupa SDK (Sistem Development Kit) maupun disertakan dalam sistem operasi Windows itu sendiri. Aplikasi yang telah menggunakan SAPI antara lain Microsoft Office, dan Windows Vista. Secara arsitektur pemrograman SAPI dapat dilihat sebagai sebuah middleware yang terletak antara aplikasi dan
speech engine. Di dalam SAPI versi 1 sampai dengan 5, aplikasi dapat berkomunikasi langsung dengan speech engine seperti tampak pada gambar berikut:
Gambar 2.1 Arsitektur Microsoft SAPI Komponen utama di dalam SAPI 5 adalah sebagai berikut: a. Voice Command, sebuah obyek level tinggi untuk perintah dan kontrol menggunakan pengenalan suara.
b. Voice Dictation, sebuah obyek level tinggi untuk continous dictation speech recognition.
c. Voice Talk, sebuah obyek level tinggi untuk speech synthesis.
e. Direct Speech Recognition, sebuah obyek sebagai mesin untuk mengontrol pengenalan suara (direct control of recognition engine)
f. Direct Text to Speech, sebuah obyek sebagai mesin yang mengontrol synthesis. g. Audio Object, untuk membaca dari audio device atau sebuah file audio
Option Explicit
1.3 CodeVisionAVR
Dewasa ini penggunanaan bahasa pemrograman tingkat tinggi (seperti C, Basic, Pascal, Forth dan sebagainya) semakin popular dan banyak digunakan untuk memprogram sistem mikrokontroler. Berdasarkan sifatnya yang sangat
fleksibeldalam hal kelulusan pemrogram untuk mengakses perangkat keras,
Bahasa C dikembangkan pertama kali oleh Dennis Ritchie dan Ken Thomson pada tahun 1972, bahasa C merupakan salah satu pemrograman yang paling populer untuk pengembangan program-program aplikasi yang berjalan pada sistem microprocessor (komputer). Karena kepopulerannya, vendor-vendor perangkat lunak kemudian mengembangkan compiler C sehingga menjadi beberapa varian berikut: Turbo C, Borland C, Microsoft C, Power C, Zortech C dan lain sebagainya.
Dibandingkan dengan bahasa assembler, penggunaan bahsa C dalam pemrograman memiliki beberapa kelebihan berikut, memepercepat waktu pengembangan, bersifat modular dan terstriktur, sedangkan kelemahannya adalah kode program hasil kompilasi akan relative lebih besar (dan sebagai konsekuensinya hal ini terkadang akan mengurangi kecepatan eksekusi). Khusus pada mikrokontroler AVR, untuk mereduksi konsekuensi negatif diatas, perusahaan atmel merancang sedemikian sehingga arsitektur AVR ini efisien dalam mendekode serta mengeksekusi instruksi-instruksi yang umum dibangkitkan oleh compiler C. Dalam kenyataannya, pengembangan arsitektur AVR ini tidak dilakukan sendiri oleh perusahaan atmel tetapi ada kerja sama dengan salah satu vendor pemasok compiler C untuk mikrokontroler tersebut, yaitu IAR C software atau pemrograman. Bagian tersebut digunakan dalam pengembangan robot dengan komponen Programmable Logic Control (PLC).
1. Header File
Adalah berkas yang berisi prototypefungsi definisi konstanta dan definisi
variable. Fungsi adalah kumpulan code C yang diberi nama dan ketika nama tersebut dipanggil maka kumpulan kode tersebut dijalankan.
Contoh:
stdio.h math.h
2. #include
Preprosesor directive adalah bagian yang berisi pengikutsertaan file atau berkasberkas fungsi maupun pendefinisian konstanta.
Contoh:
#include<stdio.h>
#includephi 3.14 3. Void
artinya fungsi yang mengikutinya tidak memiliki nilai kembalian
(return).
4. Main ( )
Fungsi main ( ) adalah fungsi yang pertama kali dijalankan ketika program dieksekusi tanpa fungsi main suatu program tidak dapat dieksekusi namun dapat dikompilasi.
5. Statement
6. Tipe Data Dasar Float 4 3.4E-38 s/d 3.4E38 Float/pecahan Long 4 -2.147.438.648 s/d
+2.147.438.647
-Double 8 1.7E-308 s/d 1.7E308 Pecahan presisi ganda Long Double 10 3.4E-4932 s/d 3.4E4932
-7. Operator
Tabel 2.2 Daftar Operator Aritmatika
Operator Deskripsi
+ Penjumlahan (add)
- Pengurangan (substract)
* Perkalian (multiply)
/ Pembagian (divide)
% Sisa pembagian integer (modulus)
~ Megasi (negate)
Tabel 2.3 Daftar Operator Kondisi
Operator Keterangan
== Sama dengan (bukan assignment)
!= Tidak sama dengan
> Lebih besar
< Lebih kecil
>= Lebih besar atau sama dengan <= Lebih kecil atau sama dengan
Tabel 2.4 Daftar Operator Logika
Opearator Keterangan
&& Logic AND
|| Logic OR
Tabel 2.5 Daftar Operator Bitwise
Operator Keterangan
& Bitwise AND
| Bitwise OR
^ Bitwise XOR
~ Bitwise NOT
8. Pernyataan if
Sebuah pernyataan yang dapat dipakai untuk mengambil keputusan berdasarkan suatu kondisi. Bentuk pernyataan ini ada dua macam:
If , Else if
Gambar 2.2 Tampilan CodeVisionAVR
sistem download secara In Sistem Programming (ISP). Untuk selanjutnya fasilitas-fasilitas lainnya dapat disetting sesuai kebutuhan dari pemrograman. Setelah selesai dengan CodeWizard AVR, selanjutnya pada menu File, pilih
Generate, Save and Exitdan simpan pada direktori yang diinginkan.
1.4 Visual Basic 6.0
Bahasa Basic pada dasarnya adalah bahasa yang mudah dimengerti sehingga pemrograman di dalam bahasa Basic dapat dengan mudah dilakukan meskipun oleh orang yang baru belajar membuat program. Hal ini lebih mudah lagi setelah hadirnya Microsoft Visual Basic, yang dibangun dari ide untuk membuat bahasa yang sederhana dan mudah dalam pembuatan scriptnya (simple scripting language) untuk graphic user interface yang dikembangkan dalam sistem operasi Microsoft Windows.
Visual Basic merupakan bahasa pemrograman yang sangat mudah dipelajari, dengan teknik pemrograman visual yang memungkinkan penggunanya untuk berkreasi lebih baik dalam menghasilkan suatu program aplikasi. Ini terlihat dari dasar pembuatan dalam visual basic adalah FORM, dimana pengguna dapat mengatur tampilan form kemudian dijalankan dalam script yang sangat mudah.
pemrograman yaitu Pemrograman Visual dan Object Oriented Programming
(OOP).
Visual Basic 6.0 sebetulnya perkembangan dari versi sebelumnya dengan beberapa penambahan komponen yang sedang tren saat ini, seperti kemampuan pemrograman internet dengan DHTML (Dynamic HyperText Mark Language), dan beberapa penambahan fitur database dan multimedia yang semakin baik. Sampai saat buku ini ditulis bisa dikatakan bahwa Visual Basic 6.0 masih merupakan pilih pertama di dalam membuat program aplikasi yang ada di pasar perangkat lunak nasional. Hal ini disebabkan oleh kemudahan dalam melakukan proses developmentdari aplikasi yang dibuat.
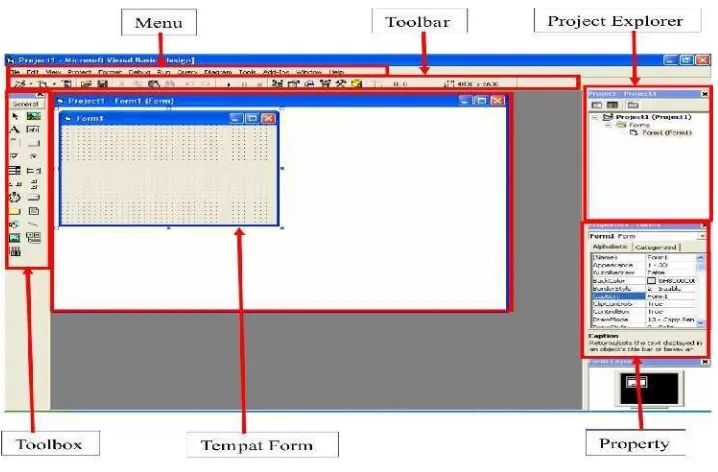
2.4.1 Interface Visual Basic 6.0
Interface Visual Basic 6.0, berisi menu, toolbar, toolbox, form, project explorer dan property seperti terlihat pada gambar 2.3. berikut:
Pembuatan program aplikasi menggunakan Visual Basic dilakukan dengan membuat tampilan aplikasi pada form, kemudian diberi script program di dalam komponen-komponen yang diperlukan. Form disusun oleh komponen-komponen yang berada di [Toolbox], dan setiap komponen yang dipakai harus diatur propertinya lewat jendela [Property]. Menu pada dasarnya adalah operasional standar di dalam sistem operasi windows, seperti membuat form baru, membuat project baru, membuka project dan menyimpan project. Di samping itu terdapat fasilitas-fasilitas pemakaian visual basic pada menu.
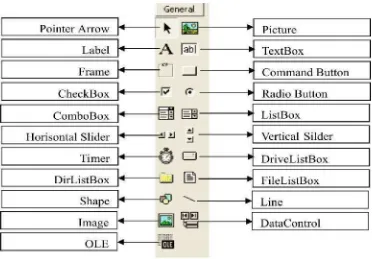
Toolbox berisi komponen-komponen yang bisa digunakan oleh suatu project aktif, artinya isi komponen dalam toolbox sangat tergantung pada jenis project yang dibangun. Komponen standar dalam toolbox dapat dilihat pada gambar 2.4 berikut ini.
2.4.2 Konsep Dasar Pemrograman Dalam Visual Basic 6.0
Konsep dasar pemrograman Visual Basic 6.0, adalah pembuatan form dengan mengikuti aturan pemrograman Property, Metode dan Event. Hal ini berarti:
(1) Property: setiap komponen di dalam pemrograman Visual Basic dapat diatur propertinya sesuai dengan kebutuhan aplikasi. Property yang tidak boleh dilupakan pada setiap komponen adalah “Name”, yang berarti nama variable (komponen) yang akan digunakan dalam scripting. Properti “Name” ini hanya bisa diatur melalui jendela property, sedangkan nilai peroperti yang lain bisa diatur melalui script seperti
Command1.Caption=”Play” Text1.Text=”Visual Basic” Label1.Visible=False Timer1.Enable=True
(2) Metode: bahwa jalannya program dapat diatur sesuai aplikasi dengan menggunakan metode pemrograman yang diatur sebagai aksi dari setiap komponen. Metode inilah tempat untuk mengekpresikan logika pemrograman dari pembuatan suatu prgram aplikasi.
2.4.3 Membuat Project Baru
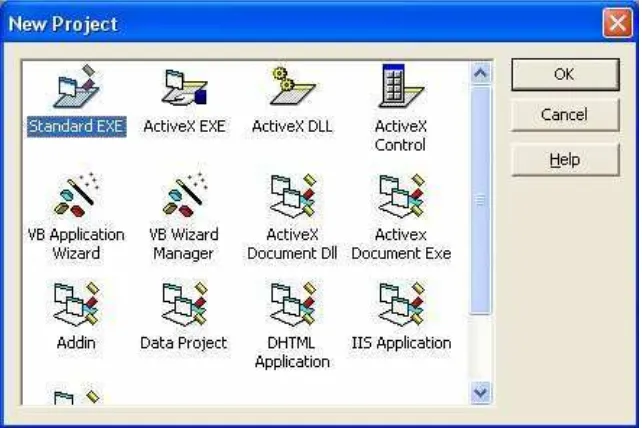
Untuk memulai pembuatan program aplikasi di dalam Visual Basic, yang dilakukan adalah membuat project baru. Project adalah sekumpulan form, modul, fungsi, data dan laporan yang digunakan dalam suatu aplikasi. Membuat projrct baru dapat dilakukan dengan memilih menu [File] >> [New Project] atau dengan menekan ikon [new project] pada Toolbar yang terletak di pojok kiri atas. Setelah itu akan muncul konfirmasi untuk jenis project dari program aplikasi yang akan dibuat seperti terlihat pada gambar 2.5. berikut.
Gambar 2.5 Layar Pemilihan Jenis Project
Visual Basic 6.0 menyediakan 13 jenis project yang bisa dibuat seperti terlihat pada gambar 2.5 di atas. Ada beberapa project yang biasa digunakan oleh banyak pengguna Visual Basic, antara lain:
diakui oleh semua unit komputer dan semua user meskipun bukan administrator. Pada buku ini akan digunakan project Standard EXE ini, sebagai konsep pemrograman visualnya.
b. ActiveX EXE: Project ini adalah project ActiveX berisi komponen-komponen kemampuan intuk berinteraksi dengan semua aplikasi di sistem operasi windows.
c. ActiveX DLL: Project ini menghasilkan sebuah aplikasi library yang selanjutnya dapat digunakan oleh semua aplikasi di sistem operasi windows.
d. ActiveX Control: Project ini menghasilkan komponen-komponen baru untuk aplikasi Visual Basic yang lain
e. VB Application Wizard: Project ini memandu pengguna untuk membuat aplikasi secara mudah tanpa harus pusing-pusing dengan perintah-perintah pemrograman.
f. Addin: Project seperti Standard EXE tetapi dengan berbagai macam komponen tambahan yang memungkinkan kebebasan kreasi dari pengguna.
g. Data project: Project ini melengkapi komponennya dengan komponen-komponen database. Sehingga bisa dikatakan project ini memang disediakan untuk keperluan pembuatan aplikasi database. h. DHTML Application: Project ini digunakan untuk membuat
i. IIS Application: Project ini menghasilkan apliaksi internet pada sisi server (server side) dengan komponen-komponen CGI (Common Gateway Interface).
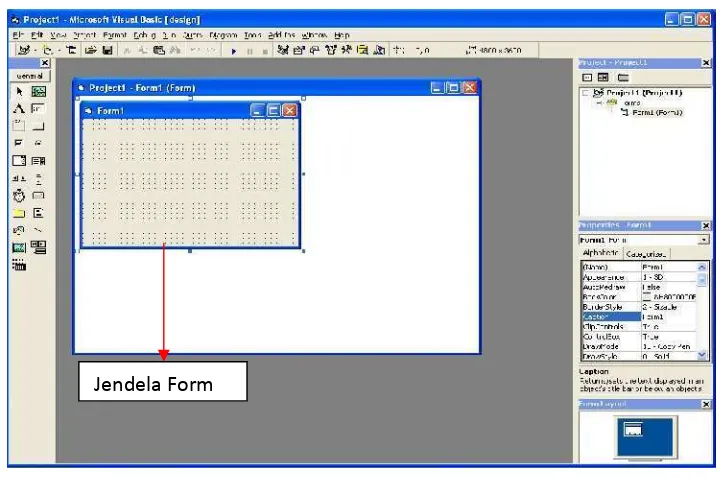
Selanjutnya pilih Standard EXE dan tekan [Ok]. Lalu muncul tampilan dari Standard Exe seperti pada gambar 2.2. Dengan demikian project sudah siap dibuat. Dalam pembuatan project sebelumnya double click pada form yang terbuat maka akan terlihat jendela tersembunyi (hidden windows) yang berupa jendela untuk pembuatan program atau jendela kode (code windows). Hal ini Dapat dilakukan dengan cara memilih ikon jendela form atau jendela kode yang ada di [Project Explorer]. Hal ini dapat dilihat pada gambar 2.6 dan gambar 2.7
Gambar 2.6. Jendela Form
Pada jendela form, digunakan dalam membangun tampilan dari program aplikasi yang akan dibuat dengan mengatur komponen-komponen baik letak, properti dan eventnya. Untuk mengambil suatu komponen dari [Toolbox] dapat
dilakukan dengan klik komponen tersebut, kemudian klik atau tarik pada posisi yang benar pada form.
Gambar 2.7. Jendela Kode
Sedangkan, pada jendela kode, digunakan untuk menuliskan program dari komponen-komponen yang sudah deletakkan pada jendela form sesuai dengan aplikasi yang akan dibuat.
2.5 Mikrokontroler AVR ATmega8535
Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus. Biasanya digunakan untuk pengontrolan otomatis dan manual pada perangkat elektronika. Beberapa tahun terakhir, mikrokontroler sangat banyak digunakan terutama dalam pengontrolan robot. Seiring perkembangan elektronika, mikrokontroler dibuat semakin kompak dengan bahasa pemrograman yang juga ikut berubah. Salah satunya adalah mikrokontroler AVR (Alf and Vegard’s Risc
processor) ATmega8535 yang menggunakan teknologi RISC (Reduce Instruction Set Computing) dimana program berjalan lebih cepat karena hanya membutuhkan satu siklus clock untuk mengeksekusi satu instruksi program. Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu kelas ATtiny, keluarga AT90Sxx, keluarga ATmega, dan AT86RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama.
Mikrokontroler AVR ATmega8535 memiliki fitur yang cukup lengkap. Mikrokontroler AVR ATmega8535 telah dilengkapi dengan ADC internal,
EEPROM internal, Timer/Counter, PWM, analog comparator, dan lain-lain. Sehingga dengan fasilitas yang lengkap ini memungkinkan kita belajar mikrokontroler keluarga AVR dengan lebih mudah dan efisien, serta dapat mengembangkan kreativitas penggunaan mikrokontroler ATmega8535.
Fitur-fitur yang dimiliki oleh mikrokontroler ATmega8535 adalah sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu port A, port B, port C, dan port D. 2. ADC internal sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan. 4. CPU yang terdiri atas 32 buah register.
5. SRAM sebesar 512 byte.
6. Memori Flash sebesar 8 kb dengan kemampuan Read While Write. 7. Port antarmuka SPI
10. Port USART untuk komunikasi serial.
11. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal 16 MHz.
12. Dan lain-lainnya.
2.5.1 Konstruksi ATmega8535
Mikrokontroler ATmega8535 memiliki 3 jenis memori, yaitu memori program, memori data dan memori EEPROM. Ketiganya memiliki ruang sendiri dan terpisah.
a. Memori program
ATmega8535 memiliki kapasitas memori progam sebesar 8 Kbyte yang terpetakan dari alamat 0000h – 0FFFh dimana masing-masing alamat memiliki lebar data 16 bit. Memori program ini terbagi menjadi 2 bagian yaitu bagian program boot dan bagian program aplikasi.
b. Memori data
ATmega8535 memiliki kapasitas memori data sebesar 608 byte yang terbagi menjadi 3 bagian yaitu register serba guna, register I/O dan SRAM. ATmega8535 memiliki 32 byte register serba guna, 64 byte register I/O yang dapat diakses sebagai bagian dari memori RAM (menggunakan instuksi LD atau ST) atau dapat juga diakses sebagai I/O (menggunakan instruksi IN atau OUT), dan 512 byte digunakan untuk memori data SRAM.
c. Memori EEPROM
diakses dengan menggunakan register-register I/O yaitu register EEPROM
Address, register EEPROM Data, dan register EEPROM Control. Untuk mengakses memori EEPROM ini diperlakukan seperti mengakses data eksternal, sehingga waktu eksekusinya relatif lebih lama bila dibandingkan dengan mengakses data dari SRAM.
ATmega8535 merupakan tipe AVR yang telah dilengkapi dengan 8 saluran ADC internal dengan fidelitas 10 bit. Dalam mode operasinya, ADC ATmega8535 dapat dikonfigurasi, baik secara single ended input maupun
differential input. Selain itu, ADC ATmega8535 memiliki konfigurasi pewaktuan, tegangan referensi, mode operasi, dan kemampuan filter derau yang amat fleksibel, sehingga dengan mudah disesuaikan dengan kebutuhan ADC itu sendiri. ATmega8535 memiliki 3 modul timer yang terdiri dari 2 buah timer/counter 8 bit dan 1 buah timer/counter 16 bit. Ketiga modul timer/counter ini dapat diatur dalam mode yang berbeda secara individu dan tidak saling mempengaruhi satu sama lain. Selain itu, semua timer/counter juga dapat difungsikan sebagai sumber interupsi. Masing-masing timer/counter ini memiliki register tertentu yang digunakan untuk mengatur mode dan cara kerjanya.
USART memungkinkan transmisi data baik secara syncrhronous maupun
asyncrhronous, sehingga dengan memiliki USART pasti kompatibel dengan UART. Pada ATmega8535, secara umum pengaturan mode syncrhronous maupun
asyncrhronous adalah sama. Perbedaannya hanyalah terletak pada sumber clock saja.
Jika pada mode asyncrhronous masing-masing peripheral memiliki sumber clock sendiri, maka pada mode syncrhronous hanya ada satu sumber clock yang digunakan secara bersama-sama. Dengan demikian, secara hardware untuk mode asyncrhronous hanya membutuhkan 2 pin yaitu TXD dan RXD, sedangkan untuk mode syncrhronous harus 3 pin yaitu TXD, RXD dan XCK.
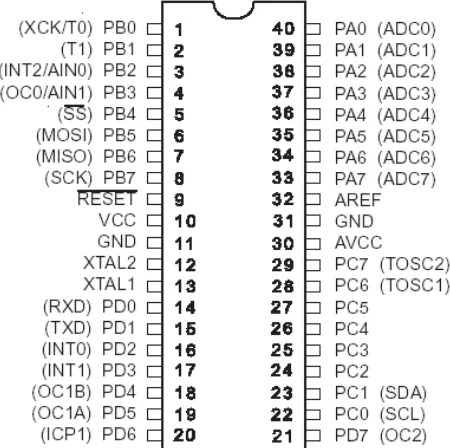
2.5.2 Pin-pin Pada Mikrokontroler ATmega8535
Konfigurasi pin ATmega8535 dengan kemasan 40 pin DIP (Dual Inline Package) dapat dilihat pada gambar 2.8. Dari gambar di atas dapat dijelaskan fungsi dari masing-masing pin Atmega8535 sebagai berikut:
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya. 2. GND merukan pin Ground.
3. Port A (PortA0…PortA7) merupakan pin input/output dua arah dan pin
masukan ADC.
4. Port B (PortB0…PortB7) merupakan pin input/output dua arah dan dan
pin fungsi khusus
5. Port C (PortC0…PortC7) merupakan pin input/output dua arah dan pin
fungsi khusus
6. Port D (PortD0…PortD7) merupakan pin input/output dua arah dan pin
fungsi khusus
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler. 8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan pin masukan tegangan untuk ADC. 10. AREFF merupakan pin masukan tegangan referensi ADC.
2.6 Komunikasi Data Serial
Equipment - DTE) dengan alat-alat pelengkap komputer (Data Circuit Terminal Equipment - DCE). Dalam banyak literatur, DCE sering diartikan sebagai Data Communication Equipment, hal ini bisa dibenarkan tetapi pengertiannya menjadi lebih sempit karena sebagai Data Communication Equipment yang dimaksud dengan DTE hanya sebatas peralatan untuk komunikasi, misalnya modem. Padahal yang dimaksud dengan Data Circuit Terminal Equipment bisa meliputi macam-macam alat pelengkap komputer yang dihubungkan ke komputer dengan standard RS232, misalnya Printer, Optical Mark Reader, Card Register dan alat-alat lainnya yang bisa dihubungkan ke komputer.
Pada prinsipnya, serial ialah pengiriman data dilakukan per bit, sehingga lebih lambat dibandingkan parallel seperti pada port printer yang mampu mengirim 8 bit sekaligus dalam sekali detak. Beberapa contoh serial ialah mouse, scanner dan sistem akuisisi data yang terhubung ke port COM1/COM2.
Device pada serial port dibagi menjadi 2 (dua ) kelompok yaitu Data Communication Equipment (DCE) dan Data Terminal Equipment (DTE). Contoh dari DCE ialah modem, plotter, scanner dan lain lain sedangkan contoh dari DTE ialah terminal di komputer.Spesifikasi elektronik dari serial port merujuk pada Electronic Industry Association (EIA) :
1. “Space” (logika 0) ialah tegangan antara + 3 hingga +25 V. 2. “Mark” (logika 1) ialah tegangan antara –3 hingga –25 V.
3. Daerah antara + 3V hingga –3V tidak didefinisikan /tidak terpakai 4. Tegangan open circuit tidak boleh melebihi 25 V.
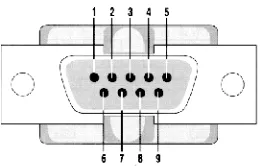
Komunikasi serial membutuhkan port sebagai saluran data. Berikut tampilan port serial DB9 yang umum digunakan sebagai port serial.
Gambar 2.9 Port DB9 Keterangan
· Pin 1 = Data Carrier Detect (DCD) · Pin 2 = Received Data (RxD) · Pin 3 = Transmitted Data (TxD) · Pin 4 = Data Terminal Ready (DTR) · Pin 5 = Signal Ground (common) · Pin 6 = Data Set Ready (DSR) · Pin 7 = Request To Send (RTS) · Pin 8 = Clear To Send (CTS) · Pin 9 = Ring Indicator (RI)
Ketika Transmitter ingin mengirimkan data, output UART akan diset dulu ke logika “0” untuk waktu satu bit. Sinyal ini pada receiver akan dikenali sebagai sinyal “Start” yang digunakan untuk menyinkronkan fase clocknya sehingga sinkron dengan fase clock transmitter. Selanjutnya data akan dikirimkan secara serial dari bit yang paling rendah (bit0) sampai bit tertinggi. Selanjutnya akan dikirimkan sinyal “Stop” sebagai akhir dari pengiriman data serial. Untuk dapat menggunakan port serial harus diketahui dahulu alamat dari port serial tersebut. Biasanya tersedia dua port serial pada CPU, yaitu COM1 dan COM2. Base Address COM1 biasanya 1016 (3F8h) dan COM2 biasanya 760 (2F8h). Alamat tersebut adalah alamat yang biasa digunakan, tergantung komputer yang digunakan.Tepatnya kita bisa melihat pada peta memori tempat menyimpan alamat tersebut, yaitu memori 0000.0400h untuk COM1 dan 0000.0402h untuk COM2. Berikut adalah nama-nama register yang digunakan beserta alamatnya.
Tabel 2.6 Nama Register Dan Alamat Register
Nama Register COM1 COM2
TX Buffer 3F8h 2F8h
RX Buffer 3F8h 2F8h
Baud Rate Dicisor latch LSB 3F8h 2F8h Baud Rate Dicisor latch MSB 3F9h 2F9h
Interrupt Enable Register 3F9h 2F9h
Interrupt Identification Register 3FAh 2FAh
Line Control Register 3FBh 2FBh
Modem Control Register 3FCh 2FCh
Line Status Register 3FDh 2FDh
Keterangan Register :
RX Buffer, digunakan untuk menampung dan menyimpan data dari DCE. TX Buffer, digunakan untuk menampung dan menyimpan data yang akan
dikirim ke port serial.
Baud Rate Divisor Latch LSB , digunakan untuk menampung byte bobot rendah untuk pembagi clock pada IC UART agar didapat baud rate yang tepat.
Baud Rate Divisor Latch MSB , digunakan untuk menampung byte bobot tinggi untuk pembagi clock pada IC UART sehingga total angka pembagi adalah 4 byte yang dapat dipilih dari 0001h sampai FFFFh.
Berikut adalah tabel angka pembagi yang sering digunakan : Tabel 2.7 Tabel Baud Rate
Baud Rate (bit/detik) Angka Pembagi
300 0180h
600 0C00h
1200 0060h
1800 0040h
2400 0030h
4800 0018h
9600 000ch
2.7 Motor DC
searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik. Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen.
Gambar 2.10 Mekanik Motor DC Mekanisme kerja untuk seluruh jenis motor secara umum :
Arus listrik dalam medan magnet akan memberikan gaya.
Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran /
loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan.
Motor-motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga putaran yang lebih seragam dan medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan.
IC L298 digunakan sebagai rangkaian driver. Cukup dihubungkan ke mikrokontroler dan diberi tegangan sebesar 5 volt dengan arus minimal 2 ampere rangkaian driver berbasis L298 sudah dapat digunakan. Selain itu, supply IC L298 dapat diberi tegangan sampai 50 Volt.
Gambar 2.11 Konfigurasi Pin IC L298
Untuk menjalankan motor, pin enable A dan enable B pada IC L298 harus diberi logika 1. Current sensing A dan current sensing B dihubungkan ke
ground. Input 1 dan input 2 masing-masing berlogika 1 dan 0, output 1 dan output 2 dihubungkan ke motor.
2.8 Optocoupler
dimana terdiri dari dua bagian yaitu transmitter dan receiver. Dasar rangkaian dapat ditunjukkan seperti pada gambar dibawah ini:
Gambar 2.12 Optocoupler
33
Pada bab ini penulis akan membahas perancangan yang merupakan proses
dari pembuatan alat yang meliputi perancangan hardware dan perancangan
software. Dimana perancangan software pengenalan ucapan menggunakan
bantuan software Sistem Development Kit SAPI 5.1 dan Microsoft Visual Basic
6.0, sedangkan perancangan program pergerakan car menggunakan software
CodeVisionAVR, dan perancangan hardware terdiri dari: perancangan catu daya,
perancangan sistem minimum ATMega8535, perancangan sensor lantai
(optocoupler), perancangan rangkaian penggerak (driver), dan perancangan
mekanik elevator.
3.1 Perancangan Hardware
Berikut adalah proses dari perancangan hardware Pengontrolan Elevator
Berbasis Sistem Pengenalan Ucapan:
3.1.1 Perancangan Blok Diagram
Hal pertama yang akan dilakukan dalam perancangan untuk perancangan
hardware Pengontrolan Elevator Berbasis Sistem Pengenalan Ucapan adalah
membuat sistem blok diagram. Dimana blok-bloknya memiliki fungsi
suara
Driver Motor
LED Lantai Mikrofon PC
Mikrokontroler
Sensor OptocouplerTombol
Gambar 3.1 Blok Diagram Pengontrol Elevator
Suara masuk ke komputer melalui mikrofon kemudian diolah
menggunakan program SAPI 5.1 dan Visual Basic 6, kemudian apabila ucapan
sudah dikenali maka komputer akan memberikan masukan kepada mikrokontroler
melalui kabel DB9 yang nantinya akan dipakai mikrokontroler sebagai input
lantai tujuan, selain dari komputer input tujuan lantai yang dikirim ke
mikrokontroler dapat juga diberikan melalui penekanan tombol. Optocoupler akan
mendeteksi posisi dari car elevator, kemudian mengirimkan masukan kepada
mikrokontroler, pada mikrokontroler masukan ini dijadikan sebagai input posisi
lantai. Kemudian mikrokontroler akan membandingkan antara input posisi lantai
dengan input tujuan lantai untuk memberikan masukan kepada driver yang
nantinya akan menggerakan motor dc.
3.1.2 Catu Daya
Perangkat elektronika mestinya dicatu oleh suplai arus searah DC (direct
current) yang stabil agar dapat bekerja dengan baik. Baterai adalah sumber catu
daya DC yang paling baik. Namun untuk aplikasi perancangan elevator ini
membutuhkan catu daya yang cukup besar, Sumber catu daya yang besar adalah
Untuk itu diperlukan suatu perangkat catu daya yang dapat mengubah arus AC
menjadi DC.
Gambar 3.2 Rangkaian Catu Daya
Transformator diperlukan untuk menurunkan tegangan AC dari jala-jala
listrik pada kumparan primernya menjadi tegangan AC yang lebih kecil pada
kumparan sekundernya. Pada rangkaian ini, dioda bridge berperan untuk merubah
dari arus AC menjadi DC dan meneruskan tegangan positif ke beban. Sedangkan
regulator voltage berfungsi sebagai filter tegangan untuk meregulasi tegangan
keluaran dari rangkaian penyearah agar bisa lebih stabil.
3.1.3 Sistem Minimum ATmega 8535
Pengendali yang dirancang adalah menggunakan mikrokontroler dan
bekerja dalam ragam single chip operation (mode operasi keping tunggal) yang
tidak memerlukan memori luar karena ROM untuk menyimpan sandi sumber
RAM yang masih bisa ditampung oleh RAM dalam dan tidak memerlukan
komponen tambahan seperti PPI, karena penggunaan port mikrokontroler hanya 4
port, yaitu untuk keluaran sinyal penggerak, masukan dari komputer melalui kabel
serial DB9, masukan dari sensor optocoupler, dan keluaran untuk LED pendeteksi
lantai tujuan sedangkan kristal yang digunakan untuk pengoperasikan
mikrokontroler adalah 3.6864 MHz. Port yang digunakan pada sistem,
PC6/TOSC1 28
Gambar 3.3 Sistem Minimum AVR ATMega 8535
3.1.4 Interface Mikrokontroler Dengan Komputer
Untuk menghubungkan antara sistem minimum ATmega 8535 dengan
1
Gambar 3.4 Rangkaian Interface ATMega 8535 Dengan Komputer
Konektor db9 memiliki 9 buah pin, tidak semua pin-pin nya kita gunakan
tetapi hanya tiga buah pin saja yaitu pin 2 sebagai Reciever Data(RXD), pin3
sebagai Transmitter data(TXD) dan pin 5 sebagai ground. Fungsi IC Max 232
adalah sebagai pengubah level tegangan TTL yang keluar dari serial Rs 232
komputer (com1/com2) dan IC max232 ini mempunyai 16 pin. Output dari Rs 232
komputer dihubungkan dengan konektor DB9.
3.1.5 Rangkaian Driver Motor DC
Rangkaian driver motor yang digunakan untuk mengatur kecepatan dan
arah pergerakan dari motor dc yang digunakan adalah sebagai berikut:
Rangkaian driver ini berfungsi untuk menggerakan motor sesuai dengan
input yang diterimanya. Rangkaian bertindak sebagai pengatur arah kerak motor
DC, apakah bergerak forward atau reverse. Secara teori, rangkaian driver motor
tersebut bekerja dengan sistem switching. Jika inputnya diberi logika input 1,
maka input 2 adalah low, sehingga perputaran motor DC bergerak forward.
Sedangkan jika input 1 diberi logika low dan input 2 diberi logika high, maka
perputaran motor DC adalah reverse.
Dimana dalam perancangan elevator ini motor dc yang digunakan adalah
motor dc 18V, jadi tegangan masukan yang dipakai untuk menggerakan motor
adalah sebesar +18V.
3.1.6 Rangkaian Optocoupler
Gambar 3.6 Rangkaian Optocoupler
Rangkaian optocoupler ditempatkan di masing-masing lantai dan dipakai
untuk mendeteksi posisi car elevator, output dan input dari rangkaian ini
dihubungkan ke mikrokontroler, dimana bila rangkaian diberi input 0 maka
rangkaian akan aktif sedangkan jika diberi logika 1, maka rangkaian akan tidak
aktif, sedangkan pemakaian transistor 2n2222 pada keluaran dimaksudkan agar
3.1.7 Perancangan Mekanik
Gambar 3.7 Perancangan Mekanik Elevator
CAR
REL
Rantai penarik
Counter weight
Gear GEARBOX
Motor
Sensor lantai optocoupler
LED Lantai
1. LED lantai, menggunakan LED super bright, dimana LED digunakan
untuk menunjukkan posisi car dan tujuan pergerakan car
2. Tombol lantai, dipasang disetiap lantai digunakan untuk memanggil
elevator.
3. Sensor Optocoupler, dipasang dimasing-masing lantai digunakan sebagai
pendeteksi posisi car.
4. Bandul penyeimbang car (counter weight), terbuat dari akrilik dengan
ketentuan dimensi : 7 cm x 1.5 cm x 10.5 cm
5. Car elevator, terbuat dari akrilik dengan ketentuan :
dimensi : 15 cm x 15 cm x 20 cm
pada rangka ini terdapat paling sedikit empat buah sliding type
guide shoes, dimana dua buah terletak pada bagian atas car dan
yang lain pada bagian bawah car tepat guide rail.
6. Rantai penarik car terbuat dari rantai keteng dengan panjang 110 cm
7. Rel Penuntun (Guide Rails), untuk kabin lift dan counter weight dipasang
menggunakan pipa besi berdiameter 2 cm dan terikat kuat pada struktur
bangunan, dimana untuk car elevator digunakan 2 buah rel sedangkan
8. Mesin Pengangkat (Hoisting Machines), berupa motor listrik dc dengan
transmisi menggunakan gearbox yang dikontrol menggunakan sebuah
driver.
9. Rangka lift, terbuat dari besi dengan ketentuan dimensi keseluruhan : 30
cm x 30 xm x 100 cm
3.2 Perancangan Software
Perancangan software dibagi menjadi 2 yaitu: perancangan program pada
VB 6.0 untuk proses pengenalan ucapan dan perancangan program pada
mikrokontroler untuk proses pergerakan elevator.
3.2.1 Interface Program Pengontrolan Elevator Pada VB
Tampilan program pengontrolan elevator pada Microsoft Visual Basic6.0
dengan menggunakan bantuan interface Microsoft SDK SAPI 5.1
3.2.2 Flowchart Program Pada Pada VB 6.0
Berikut adalah flowchart program pengontrolan elevator pada VB 6.0:
3.2.3 Flowchart Program Pada Mikrokontroler
Berikut adalah flowchart program pergerakan car elevator pada
A
Gambar 3.10 Flowchart Program Mikrokontroler
Keterangan:
w = indikator tujuan lantai 1
x = indikator tujuan lantai 2
y = indikator tujuan lantai 3
z = indikator tujuan lantai 4
Flowchart program pergerakan car elevator diatas merujuk pada ketentuan
sebagai berikut:
1. pergerakan car mengacu pada pemanggilan lantai yang pertama diberikan,
2. apabila car berada pada sebuah lantai keadaan diam kemudian ada
pemanggilan ke lantai yang lain, maka car akan menuju pada lantai yang
bersangkutan,
3. apabila car dalam pergerakan turun, misal:
a. car berada pada lantai 3 kemudian ada pemanggilan pada lantai 1
dan diikuti pemanggilan pada lantai 2, maka car akan bergerak turun
menuju lantai 2 berhenti sejenak kemudian melanjutkan ke lantai 1,
b. car berada pada lantai 3 kemudian ada pemanggilan pada lantai 1
dan lantai 2 kemudian diikuti pemanggilan pada lantai 4 maka car
akan bergerak turun menuju lantai 2 berhenti sejenak kemudian
melanjutkan ke lantai 1 berhenti sejenak kemudian menuju lantai 4,
4. apabila car dalam pergerakan naik, misal:
a. car berada pada lantai 2 kemudian ada pemanggilan pada lantai 4
dan diikuti pemanggilan pada lantai 3, maka car akan bergerak turun
menuju lantai 3 berhenti sejenak kemudian melanjutkan ke lantai 4,
b. car berada pada lantai 3 kemudian ada pemanggilan pada lantai 4
dan lantai 3 kemudian diikuti pemanggilan pada lantai 2 maka car
akan bergerak turun menuju lantai 3 berhenti sejenak kemudian
46
Pengujian dan analisa sistem merupakan tahap akhir dari realisasi
pengontrolan elevator berbasis pengenalan ucapan. Tahap ini merupakan tahap
yang paling penting untuk mengetahui tingkat keberhasilan, keunggulan dan
kekurangan dari sistem tersebut. Dengan begitu kita dapat mengetahui sistem
yang telah direalisasikan menghasilkan keluaran yang diinginkan. Pengujian dan
analisa yang dilakukan meliputi sistem secara keseluruhan.
4.1 Driver Motor L298
Driver motor L298 digunakan sebagai pemicu dari arah pergerakan motor
dc. Pada L298 memiliki 2 buah pin enable, 4 buah pin input, dan 4 buah pin
output yang mana memungkinkan bagi kita untuk mengontrol 2 buah motor dc,
namun pada rangkaian driver kali ini hanya dipakai 1 buah motor dc jadi pin yang
dipakai cukup 1 buah enable (ENB/PIN 11), 2 buah pin input (IN3/PIN 10 dan
IN4/PIN12), dan 2 buah output (OUT3/PIN13 dan OUT4/PIN14) yang
dihubungkan dengan motor dc.
Pengujian dilakukan dengan cara memberi inputan berupa logika “1” dan
“0” pada masing-masing pin inputan secara bergantian kemudian melihat
perubahan pada pergerakan motor yang terlebih dahulu sudah disambungkan pada
pin-pin output dari driver. Berikut adalah tabel hasil pengujian rangkaian driver
Tabel 4.1 Hasil Pengujian Rangkaian Driver Motor L298
PIN L298
Kondisi Motor Enable B Input 3 Input 4
0 0 0 Diam
Optocoupler dipakai sebagai sensor pendeteksi posisi car elevator yang
nantinya akan dipakai untuk acuan dari pergerakan motor dc. Berikut adalah tabel
hasil pengujian sensor optocoupler:
Tabel 4.2 Hasil Pengujian Rangkaian Sensor Optocoupler
Sensor Optocoupler Kondisi Terhalang
Kondisi Tidak Terhalang
Optocoupler lantai 1 4.98 V 0 V
Optocoupler lantai 2 4.98 V 0 V
Optocoupler lantai 3 4.97 V 0 V
Optocoupler lantai 4 4.98 V 0 V
Dari tabel diatas dapat dilihat apabila optocoupler terhalangi maka
tegangan output high sedangkan saat tidak terhalangi tegangan output low, hal ini
karena pada bagian output rangkaian ditambahkan transistor 2N2222 yang
mengakibatkan keluaran dari optocoupler menjadi berbanding terbalik dengan
optocoupler akan bernilai high (memberikan tegangan mendekati 5V) saat kondisi
tidak terhalangi dan 0 V ketika dalam kondisi terhalangi.
4.3 Kinerja Pengenalan Ucapan
Pengujian pengenalan ucapan dilakukan dalam 2 kondisi, yaitu dalam
keadaan tenang dan dalam keadaan penuh derau. Hal ini dilakukan untuk melihat
sejauh mana kehandalan proses pengenalan ucapannya. Untuk menghitung
persentasi keberhasilan digunakan persamaan sebagai berikut:
Untuk pengujian dalam keadaan tenang, dilakukan dengan cara
menyebutkan kata masukan masing-masing sebanyak 10 kali. Berikut adalah tabel
hasil pengujian pengenalan ucapan dalam keadaan tenang:
Tabel 4.3 Hasil Pengujian Pengenalan Ucapan Kondisi Tenang
Kata Masukan Dikenali Sebagai Persentasi Tingkat Pengenalan
One One 100
Two Two 70
To 30
Three Three 100
Four Four 80
For 20
Sedangkan untuk pengujian yang dalam keadaan penuh derau, pengujian
dilakukan dengan menyebutkan kata masukan masing-masing sebanyak 10 kali
dibangkitkan dari suara musik dari komputer). Berikut tabel hasil pengujian
pengenalan ucapan dalam kondisi penuh derau:
Tabel 4.4 Hasil Pengujian Pengenalan Ucapan Kondisi Penuh Derau
Kata Masukan Dikenali Sebagai Persentasi Tingkat Pengenalan
One One 90
To one 10
Two
Two 70
To 20
22 10
Three Three 90
30 10
Four Four 60
50
5.1 Kesimpulan
Setelah melakukan pengujian dan penganalisaan data, maka dapat diambil
beberapa kesimpulan:
1. Selain menggunakan tombol proses pengontrolan elevator dapat juga
dilakukan dengan menggunakan input suara manusia melalui sistem
pengenalan ucapan (Speech Recognition).
2. Proses pengenalan ucapan menggunakan program bantuan SAPI 5.1
mempunyai tingkat keberhasilan mencapai 87.5 % untuk keadaan tenang
sedangkan keadaan berisik tingkat keberhasilannya mencapai 77.5 %.
3. Penurunan kinerja sistem pengenalan ucapan sangat dipengaruhi oleh:
a. Pelafalan kata masukan, untuk menghasilkan pengenalan kata
masukan sesuai dengan yang diinginkan perlu diperhatikan
intonasi pelafalan kata-kata masukan yang diucapkan.
b. Suara tambahan (noise) yang ditambahkan dalam proses pengujian
sangat berpengaruh dalam proses pengenalan. Dimana ketika noise
ditambahkan pada saat pengucapan kata masukan kinerja sistem
5.2 Saran
1. Pelafalan ucapan, lafal pengucapan kata masukan harus jelas dan sesuai
dengan pemenggalan kata.
2. Proses pengenalan ucapan sebaiknya dilakukan dalam keadaan minim
52
Prasetia, Retna dan Catur E.W. 2004. Interfacing Port Paralel dan Port Serial
Komputer dengan Visual Basic 6.0. Yogyakarta : ANDY.
Rangkuti, Syahban. Mikrokontroller ATMEL AVR. Edisi Revisi, Bandung:
INFORMATIKA.
Winoto, Ardi. Mikrokontroler AVR Atmega8/32/16/8535 Dan Pemrogramannya
Dengan Bahasa C Pada WinAVR. Edisi Revisi, Bandung :
INFORMATIKA.
Sadeli, Muhammad. 2010. Visual Basic 6.0, Palembang: Maxikom.
I. IDENTITAS DIRI
Nama Lengkap : Feri Firdian
NIM : 1.31.06.012
Tampat, Tanggal Lahir : Ciamis, 12 Oktober 1987
Agama : Islam
Jenis Kelamin : Laki-laki
Status : Mahasiswa
Alamat Asal : Jln.Jalatrang no. 70 RT/RW :02/01
Ds.Pusakasari Kec.Cipaku
Kab.Ciamis Jawa Barat (46252)
No. Telephone : (0265) 2795 332
No. Handphone : 08562170547
1994 - 2000 : SDN Buniseuri V
2000 – 2003 : MTs Mujahidin
2003 – 2006 : SMAN 1 Ciamis