LAMPU RUANGAN BERDASARKAN INFORMASI JAM
KERJA MENGGUNAKAN DELPHI
Laporan ini disusun untuk memenuhi salah satu syarat
dalam menempuh Program Pendidikan Sarjana
di Jurusan Teknik Elektro
Disusun Oleh : IIP IRMANSYAH
13106022
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
i
Tugas akhir ini menuangkan tentang pengontrolan pintu gerbang dan intensitas lampu ruangan menggunakan Program Borland Delphi 7 dan dibantu dengan 2 buah mikrokontroler ATmega16. Tujuan dari Tugas Akhir ini adalah membuat aplikasi simulasi pengendalian pintu gerbang dan intensitas lampu ruangan secara otomatis, serta memantau dan mengendalikannya menggunakan Program Borland Delphi 7. Pendeteksian keberadaan kendaraan dan keberadaan orang dalam ruangan dibantu oleh rangkaian sensor infra merah yang terdiri dari rangkaian pengirim (Infra merah) dan rangkaian penerima (Photodioda). Semua data yang telah diproses oleh 2 buah mikrokontroler ATmega16 dikirimkan ke PC melalui rangkaian komunikasi RS232.
ii
The final task is poured on the control gate and the intensity of room light using Borland Delphi 7 program and assisted with 2 pieces ATmega16 microcontroller. The purpose of this Final Project is to create a simulation application controlling the gates and automatic room light intensity, and monitoring and control by using Borland Delphi 7 Program. Vehicle presence detection and the presence of people in the room helped by a series of infrared sensors which consist of a set of senders (Infrared) and receiver circuits (Photodiode). All data have been processed by the microcontroller ATmega16 2 pieces sent to a PC via RS232 communication circuits.
iii
Dengan mengucapkan puji syukur Alhamdulillah segala puji bagi Allah SWT, karena berkat Rahmat dan Ridho-Nya jualah, sehingga penulis dapat menyelesaikan Laporan Akhir ini dengan judul “PENGENDALIAN PINTU GERBANG DAN INTENSITAS LAMPU RUANGAN BERDASARKAN INFORMASI JAM KERJA MENGGUNAKAN DELPHI.”
Penulisan Tugas Akhir ini dimaksudkan sebagai salah satu syarat dalam menyelesaikan studi Program Sarjana pada Jurusan Teknik Elektro, Fakultas Teknik dan Ilmu Komputer, Universitas Komputer Indonesia. Dalam penulisan Tugas Akhir ini, penulis seringkali menghadapi kesulitan-kesulitan. Namun atas bantuan dan dorongan moril ataupun materiil dari berbagai pihak, maka penulisan Tugas Akhir ini dapat diselesaikan. Dalam kesempatan ini izinkanlah penulis untuk menyampaikan ucapan terima kasih yang sebesar-besarnya kepada :
1. Bapak Dr. Ir. Eddy Suryanto Soegoto, M.Sc sebagai Rektor UNIKOM Bandung.
2. Bapak Dr. Arry Ahmad Armansebagai Dekan Fakultas Teknik dan Ilmu Komputer UNIKOM Bandung.
3. Bapak Muhammad Aria, MT. Sebagai Ketua Jurusan Teknik Elektro UNIKOM Bandung dan pembimbing penulis tugas akhir ini.
iv di UNIKOM Bandung.
6. Ibu Mery selaku sekretaris Jurusan Program Studi Teknik Elektro UNIKOM Bandung.
7. Kedua Orang Tuakuyang selalu memberikan dorongan moril dan materi serta do’a kepada penulis selama mengikuti perkuliahan di UNIKOM Bandung.
8. Kakakku Abung Supama Wijaya yang telah memberikan banyak petuah dan masukan selama penulis mengikuti perkuliahan di UNIKOM.
9. Adiku tercinta Neng Dinda Fajrianti yang selalu menghibur disaat penulis mengalami ganguann-ganguan dalam berfikir.
10.Nia Rusydiana yang selalu bersabar dan banyak memberikan dukungan selama penulis menyusun laporan tugas akhir ini.
11. Penghuni kontrakan Eceng Gondok. Agah Junaedi Rohman, Hanra Syariandi, Rudi Rusdiana, Yuga Aditya Permana yang telah menjadi sahabat penulis dalam suka dan duka selama mengikuti perkuliahan di Jurusan Teknik Elektro UNIKOM Bandung. “Thanks You So Much…!!” 12. Kawan seperjuangan di kampus Wahyudin, Mamang Arief Amirrudin,
Primayuda Permana, Ifey, Angga Nugraha, Dede Nugraha, Mulyana Syarif, Feri Firdian, Wida Pramudita, Agung Herdiana, Rudi Susilo, Badrun, Omen, Indra Purnama, Zakir Ali, Mulki Soprima.
v kepada penulis mendapat paha dari-Nya. Amin.
Bandung, Agustus 2011
1 1.1 Latar Belakang
Perkembangan Ilmu Pengetahuan dan Teknologi (IPTEK) dewasa ini sangat pesat, terutama dibidang teknologi elektronika. Komputer merupakan salah satu alat elektronika yang berteknologi tinggi. Dengan adanya komputer peranan manusia menjadi lebih ringan, karena komputer dapat bekerja secara terus -menerus. Sehingga pemanfaatan dari komputer dapat membantu manusia dalam mengerjakan pekerjaan yang rutinitas.
Dalam era modern, sistem kontrol biasanya menuju pada otomatisasi sistem. Karena dengan adanya sistem otomatis ini, maka peranan manusia dapat terbantu. Bukan hanya sebagai alat pembatu manusia tetapi sistem otomatis ini dapat memudahkan suatu proses kerja. Maka untuk memenuhi kebutuhan otomatisasi ini, diperlukan alat kontrol yang dapat bekerja secara otomatis.
yang memiliki kecerdasan, yaitu sebuah sensor. Banyak sensor yang dapat mendukung untuk sistem tersebut, salah satunya adalah sensor jarak yang bernama inframerah. Begitupun dengan penggunaan pintu gerbang, membutuhkan system otomatis untuk membuka atau menutupnya. Dan sensor inframerah dapat diterapkan pada aplikasi ini.
Pada umumnya, meskipun system kita bersifat otomatis, namun kita sering lupa untuk memantau system tersebut. Maka kita membutuhkan program yang bisa memantau keadaan system tersebut. Delphi dapat mengatasi masalah ini, dengan Delphi kita bisa mengendalikan dan memantau alat yang ingin kita kendalikan.
Penerapan pengaturan intensitas lampu secara otomatis dan pintu gerbang otomatis menggunakan Delphi ini sangat cocok diterapkan di perkantoran. Karena biasanya terdapat banyak karyawan yang berada di satu ruangan yang sama. Semakin banyak karyawan yang ada, maka semakin maximal cahaya lampu yang dipancarkan. Begitupun dengan buka/tutup pintu gerbang, pintu akan terbuka/tertutup tanpa campur tangan manusia secara langsung.
1.2 Tujuan
Adapun tujuan yang ingin dicapai penulis dalam pembuatan Tugas Akhir ini adalah :
1. Merancang dan membuat prototipe alat pengatur intensitas cahaya lampu.
3. Memanfaatkan program Borland Delphi sebagai system monitoring dan pengendali.
4. Mengaplikasikan mikrokontroler jenis AVR ATMega16 sebagai komponen pengendali motor DC dan intensitas cahaya lampu.
1.3 Rumusan Masalah
Sesuai dengan latar belakang, maka rumusan masalah yang akan dibahas antara lain :
1. Bagaimana rancang bangun simulasi pengaturan intensitas lampu secara otomatis dan pintu gerbang otomatis menggunakan sensor inframerah yang nantinya dipantau oleh program Delphi.
2. Bagaimana langkah – langkah pemograman program Delphi. 3. Bagaimana proses monitoring menggunakan Program Delphi.
4. Bagaimana memutarkan motor stepper dengan menggunakan rangkaian sensor inframerah.
5. Bagaimana mengatur intensitas lampu dibantu dengan rangkaian sensor inframerah.
6. Bagaimana menguji alat yang telah dirancang.
1.4 Batasan Masalah
Batasan - batasan masalah tersebut diantaranya :
1. Membuat rangkaian untuk intensitas lampu dan rangkaian untuk pintu gerbang.
2. Aplikasi otomatis rangkaian lampu dan pintu gerbang hanya dapat dioperasikan dari jam 7 pagi sampai jam 2 sore.
3. Penghitungan oleh sensor dilakukan dalam keadaan orang yang melewati pintu dalam keadaan tidak berdesakan atau dalam antrian. 4. Jenis lampu menggunakan lampu pijar.
5. Untuk pengontrolan lampu hanya digunakan di satu ruangan saja. 6. Pintu gerbang hanya untuk kendaraan roda 4.
7. Setiap pintu gerbang hanya menggunakan satu motor, yaitu motor DC.
8. Penguncian pintu gerbang hanya menggunakan keadaan motor yang tidak bergerak.
9. Monitoring dilakukan oleh program Delphi pada satu PC. 10. Alat kendali dipantau secara terpusat dalam ruang kontrol.
1.5 Metodologi Penelitian
a. Studi Literatur
Tahapan ini dilakukan dengan cara mengumpulkan materi-materi yang diperlukan dalam melakukan penelitian dari berbagai jenis sumber kepustakaan diantaranya buku, literatur, jurnal, laporan penelitian, browsing internetdan berbagai sumber lainnya.
b. Perancangan Sistem
Tahapan ini terdiri 2 tahapan, yaitu tahap pertama perancangan perangkat keras seperti perancangan mekanik dan rangkaian-rangkaian elektronika, sedangkan tahap kedua adalah perancangan algoritma program (listing program) dengan menggunakan software CodeVisionAVR.
c. Pengujian Sistem
Pengujian alat akan dilakukan pada tiap blok (rangkaian elektronika sebelum diinterkoneksikan) dan pada keseluruhan rangkaian elektronika (setelah diinterkoneksikan).
1.6 Sistematika Penulisan
BAB 3 Perancangan Alat, Pada bagian ini akan dibahas mengenai pembuatan dan perancangan rangkaian yang digunakan. Mulai dari perancangan rangkaian power supply, rangkaian sensor infra merah, rangkaian system minimum, rangkaian dimmer, rangkaian driver motor dan rangkaian-rangkaian pendukung lainnya.
BAB 4 Pengujian dan Analisa, pada bab ini dilakukan beberapa pengujian terhadap rangkaian-rangkaian yang telah dibuat. Pengujian dilakukan dengan menjalankan alat tersebut. Sedangkan analisa dilakukan untuk mengukur tegangan dan arus yang terdapat pada titik tertentu alat tersebut.
7 2.1 Pengenalan dan Pengertian Delphi
Delphi adalah suatu bahasa pemograman (development language) yang digunakan untk merancang suatu aplikasi program.
Delphi termasuk dalam pemrograman bahasa tingkat tinggi (high level lenguage). Maksud dari bahasa tingkat tinggi yaitu perintah-perintah programnya menggunakan bahasa yang mudah dipahami oleh manusia. Bahasa pemrograman Delphi disebut bahasa prosedural artinya mengikuti urutan tertentu. Dalam membuat aplikasi perintah-perintah, Delphi menggunakan lingkungan pemrograman visual.
Delphi merupakan generasi penerus dari Turbo Pascal. Pemrograman Delphi dirancang untuk beroperasi dibawah sistem operasi Windows. Program ini mempunyai beberapa keunggulan, yaitu produktivitas, kualitas, pengembangan perangkat lunak, kecepatan kompiler, pola desain yang menarik serta diperkuat dengan bahasa perograman yang terstruktur dalam struktur bahasa perograman
Object Pascal.
memungkinkan pembuatan prototipe aplikasi menjadi lebih mudah dan waktu yang diperlukan untuk mengembangkan aplikasi menjadi lebih singkat.
2.1.1 File – file Penyusun Project
Sepintas sebuah program aplikasi yang dapat dibuat dengan menggunakan Delphi hanya terdiri dari file project dan sebuah unit. Namun kenyataannya terdapat beberapa file yang dibentuk pada saat membangun sebuah program aplikasi. Berikut ini merupakan file-file penyusun projek yang terdapat pada program Delphi, yaitu :
1. File Project (.D pr ) dan file Unit (.P as )
Sebuah program Delphi terbangun dari modul-modul source code yang disebut unit. Delphi menggunakan sebuah file projek (.D pr ) untuk menyimpan program utama. File sumber untuk unit biasanya berisi sebagian besar kode di dalam aplikasi, file ini ditandai dengan ekstensi (.P as ). Setiap aplikasi atau projek terdiri atas file projek tunggal atau lebih dalam file unit.
2. File Form(. Dfm )
File form adalah file biner yang dibuat oleh Delphi untuk menyimpan informasi yang berkaitan dengan form.
3. File Resource(. Res )
project dapat menggunakan editor resource, misalnya editor untuk membuat file resource.
4. File Project Options(. Dof ) dan File Desktop Settings (. Ds k)
File project options merupakan file yang berisi options-options dari suatu
project yang dinyatakan melalui perintah Options dari menu Project. Sedang file desktop settingberisi option-option yang dinyatakan melalui perintah Environment Optionsdari menu Tools. Perbedaan di antara kedua jenis file tersebut adalah bahwa file project options dimiliki oleh setiap project sedangkan file desktop setting dipakai untuk lingkungan Delphi. Apabila ada kerusakan pada kedua jenis file tersebut dapat mengganggu proses kompilasi. Prosedur yang dapat kita tempuh untuk menangani gangguan tersebut adalah dengan menghapus kedua jenis file tersebut yaitu . Do f dan . Dsk karena kedua file tersebut akan terbentuk secara otomatis pada saat menyimpan project.
5. File Backup(.~d p, . ~d f, . ~p a)
File-file dengan ekstensi di atas merupakan file backupdari suatu project,
form dan unit. Ketiga jenis file tersebut akan terbentuk pada saat proses penyimpanan untuk yang kedua kalinya. Kerena ketiga file tersebut berjenis backup (cadangan) maka ketiga jenis file tersebut berisi salinan terakhir dari file-file utama sebelum disimpan lebih lanjut.
6. File jenis lain
dan beberapa file Windows yang digunakan Delphi. File-file tersebut adalah:
a) File Executable (. Exe ). File ini dibentuk oleh compiler dan meruakan file esekusi (executable) dari program aplikasi. File ini berdiri sendiri dan hanya memerlukan file library di D LL , VB X dan lain-lain
b) File unit Object (. Dcu). File ini merupakan file unit (. Pa s) yang telah dikompilasi oleh compiler yang akan dihubungkan dengan file esekusi.
c) File Dinamic Link Library (.D ll). File ini dibentuk oleh compiler
apabila kita merancang . DLL sendiri.
d) File Help. File ini merupakan file Windows dan merupakan file
helpstandar yang dapat dipakai diprogram aplikasi Delphi.
2.1.2 Tampilan Delphi
Berikut adalah gambar dari keseluruhan tampilan Delphi
Gambar 2.1 Tampilan Delphi
2.1.3 IDE (Integrated Development Environment)
Kemudian, hal yang paling pertama dalam mengenal Delphi adalah harus mengetahui IDE. IDE (Integrated Development Environment) merupakan lingkungan/wilayah dimana seluruh tools atau komponen-komponen yang dibutuhkan untuk merancang atau membangun aplikasi program. Secara umum IDE Delphi di kelompokkan kepada 8 bagian yaitu :
1. Main Menu
Merupakan penunjuk ke seluruh fasilitas yang disediakan aplikasi Delphi.
2. Toolbar / Speedbar
Merupakan Icon (Sortcut)yang dirancang untuk lebih memudahkan menjangkau fasilitas yang ada pada Delphi.
Gambar 2.3. Toolbar Pemrograman Delphi 3. Component Palette
Merupakan komponen-komponen VCL(Visual Component Library) yang dikelompokkan kedalam Tab-tab, komponen komponen inilah yang akan digunakan untuk merancang interface atau antar muka aplikasi.
Gambar 2.4. Component Palette Pemrograman Delphi 4. Form Designer
Merupakan interface (antar muka) apalikasi yang akan dibangun, Form akan menampung seluruh komponen yang akandigunakan dalam proses
perancangan sebuah aplikasi dengan Delphi.
5. Code Editor
Code editor merupakan tempat untuk menuliskan kode program menggunakan bahasa object Pascal. Kode program tidak perlu di tulis secara keseluruhan karena Delphi sudah menyediakan blok atau kerangka untuk menulis kode program.
Gambar 2.6. Code Editor Pemrograman Delphi 6. Code Explorer
Gambar 2.7. Code Explorer Pemrograman Delphi 7. Object inspector
Object inspector digunakan untuk mengubah properti atau karakteristik dari suatu komponen. Terdiri dari 2 tab yaitu :
a. Properties
Digunakan untuk menentukan seting suatu objek. Satu objek memiliki beberapa properti yang dapat diatur langsung dari object inspector maupun melalui kode program. Seting ini mempengaruhi cara kerja objek tersebut saat aplikasi dijalankan.
b. Event
Merupakan bagian yang dapat diisi dengan kode program tertentu yang berfungsi untuk menangani event-event (berupa sebuah procedure) yang dapat direspon oleh sebuah komponen.
menyatakan tindakan tersebut (berupa sebuah procedure) menggunakan OnClose.
Gambar 2.8. Object Inspector Pemrograman Delphi 8. Object Tree View
Object tree view berisi daftar komponen yang sudah diletakkan di form designer.
2.1.4 Kode Perintah Pada Delphi
Berikut adalah contoh bahasa pemograman pada Delphi yang dapat menghubungkan ke mikrokontroler.
. Gambar 2.10 Port Library
procedure TForm1.ComPortRxChar(Sender: TObject; Count: Integer);
if ord(ch)<>0 then memo.SelText := ch
else memo.SelText := ‘0′
end;
end;
Artinya bahwa bila ada data masuk ke serial port, maka akan ditampilkan di jendela memo, kemudian program pada button adalah ;
ComPort.ShowSetupDialog;
Fungsinya adalah mengatur parameter serial port.
Kemudian pengisian program pada Memo - OnKeyPress seperti dibawah ini;
procedure TForm1.MemoKeyPress(Sender: TObject; var Key: Char);
begin
ComPort.WriteStr(key);
end;
Artinya apa yang kita ketikan di jendela memo, akan dikirimkan ke serial port.
2.2 Mikrokontroler AVR ATmega16
dalam satu siklus clock. AVR mempunyai 32 register general-purpose,
timer/counter fleksibel dengan mode compare, interupsi internal dan eksternal, serial UART, programmable Watchdog Timer, power saving mode, ADC dan PWM. AVR pun mempunyai In-System Programmable (ISP) Flash on-chip yang mengijinkan memori program untuk diprogram ulang (read/write) dengan koneksi secara serial yang disebut Serial Peripheral Inteface(SPI).
AVR memilki keunggulan dibandingkan dengan mikrokontroler lain, keunggulan mikrokontroler AVR yaitu memiliki kecepatan dalam mengeksekusi program yang lebih cepat, karena sebagian besar instruksi dieksekusi dalam 1 siklus clock (lebih cepat dibandingkan mikrokontroler keluarga MCS 51 yang memiliki arsitektur Complex Intrukstion Set Compute).
ATMega16 mempunyai throughput mendekati 1 Millions Instruction Per Second (MIPS) per MHz, sehingga membuat konsumsi daya menjadi rendah terhadap kecepatan proses eksekusi perintah.
Beberapa keistimewaan dari AVR ATMega16 antara lain:
1. Mikrokontroler AVR 8 bit yang memilliki kemampuan tinggi dengan konsumsi daya rendah
2. Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi 16MHz
3. Memiliki kapasitas Flash memori 16 Kbyte, EEPROM 512 Byte dan SRAM 1 Kbyte
4. Saluran I/O sebanyak 32 buah, yaitu PortA, PortB, PortC dan PortD 5. CPU yang terdiri dari 32 buah register
7. PortUSART untuk komunikasi serial 8. Fitur peripheral
Tiga buah Timer/Counter dengan kemampuan perbandingan (compare)
Dua buah Timer/Counter 8 bit dengan Prescaler terpisah dan
Mode Compare
Satu buah Timer/Counter 16 bit dengan Prescaler terpisah,
Mode Compare dan Mode Capture
Real Time Counterdengan Oscillatortersendiri
Empat kanal PWM
8 kanal ADC
8 Single-ended Channel dengan keluaran hasil konversi 8 dan 10 resolusi (register ADCH dan ADCL)
7 Diferrential Channel hanya pada kemasan Thin Quad Flat Pack (TQFP)
2 Differential Channeldengan Programmable Gain
Antarmuka Serial Peripheral Interface (SPI)Bus
Watchdog Timerdengan Oscillator Internal
On-chip Analog Comparator
2.2.1 Konfigurasi Pin AVR ATMega16
Gambar 2.11 Konfigurasi Kaki (pin) ATMega16
Konfigurasi pin ATMega16 dengan kemasan 40 pin Dual In-line Package
(DIP) dapat dilihat pada Gambar 2.10. Dari gambar diatas dapat dijelaskan fungsi dari masing-masing pinATMega16 sebagai berikut :
Vcc : Masukan tegangan catu daya GND : Ground
Port B (PB7..PB0) : Port B berfungsi sebagai sebagai port I/O dua arah 8 bit. Masing-masing pin menyediakan resistor pull-up internal yang bisa diaktifkan untuk masing-masing bit.
Port C (PC7..PC0) : Port C berfungsi sebagai sebagai port I/O dua arah 8 bit. Masing-masing pin menyediakan resistor pull-up internal yang bisadiaktifkan untuk masing-masing bit. Resistor pull up internal berkaitan dengan rangkaian internal pada mikrokontroler AVR yang bersangkutan.
Port D (PD7..PD0) : Port D berfungsi sebagai sebagai port I/O dua arah 8 bit. Masing-masing pin menyediakan resistor pull-up internal yang bisa diaktifkan untuk masing-masing bit.
RESET : Masukan Reset. Level rendah pada pin ini selama lebih dari lama waktu minimum yang ditentukan akan menyebabkan reset, walaupun clock tidak dijalankan.
XTAL1 : Masukan ke penguat osilator terbalik (inverting) dan masukan ke rangkaian clock internal.
XTAL2 : Keluaran dari penguat osilator terbalik.
AVCC : Merupakan masukan tegangan catu daya untuk Port A sebagai ADC, biasanya dihubungkan ke Vcc, walaupun ADC-nya tidak digunakan. Jika ADC digunakan sebaiknya dihubungkan ke Vcc melalui tapis lolos-bawah (low-pass filter).
2.2.2 Pemograman Mikrokontroler ATmega16
Pengembangan sebuah system menggunakan mikrokontroler AVR buatan ATMEL menggunakan software AVR STUDIO dan CodeVision AVR. AVR STUDIO merupakan software khusus untuk bahasa assembly yang mempunyai fungsi sangat lengkap, yaitu digunakan untuk menulis program, kompilasi, simulasi dan download program ke IC mikrokontroler AVR dapat dilakukan pada CodeVision. CodeVision AVR memilki fasilitas terminal, yaitu untuk melakukan komunikasi serial dengan mikrokontroler yang sudah diprogram. Proeses
download program ke IC mikrokontroler AVR dapat menggunakan system download secara In-System Programming (ISP). ISP Flash On-chip mengijinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI.
#include <mega16.h>
UBRRH=0X00; // Baud rate 9600bps, pada kristal 4 MHz UBRRL=0X19;
puts(judul); //tampilkan pesan dan ganti baris putchar('O');
delay_ms(100); //tunggu UDR siap UDR='K';
}
Diatas adalah contoh program pengiriman data ke PC. Maka, pada saat kita membuka hyperterminal pada PC dan menjalankannya, maka akat tampil tulisan “Kirim Data”.
2.3 Komunikasi Data Serial
Standart RS232 ditetapkan oleh Electronic Industry Association dan
standard ini hanya menyangkut komunikasi data antara komputer (Data Terminal Equipment - DTE) dengan alat-alat pelengkap computer (Data Circuit Terminal Equipment - DCE). Dalam banyak literatur, DCE sering diartikan sebagai Data Communication Equipment, hal ini bisa dibenarkan tetapi pengertiannya menjadi lebih sempit karena sebagai Data Communication Equipment yang dimaksud dengan DTE hanya sebatas peralatan untuk komunikasi, misalnya modem. Padahal yang dimaksud dengan Data Circuit Terminal Equipment bisa meliputi macam-macam alat pelengkap komputer yang dihubungkan ke komputer dengan standard RS232, misalnya Printer, Optical Mark Reader, Card Register dan alat-alat lainnya yang bisa dihubungkan ke komputer.
Pada prinsipnya, serial ialah pengiriman data dilakukan per bit, sehingga lebih lambat dibandingkan parallel seperti pada port printer yang mampu mengirim 8 bit sekaligus dalam sekali detak. Beberapa contoh serial ialah mouse, scanner dan system akuisisi data yang terhubung ke port COM1/COM2.
Device pada serial port dibagi menjadi 2 (dua ) kelompok yaitu Data Communication Equipment (DCE)dan Data Terminal Equipment (DTE).Contoh dari DCEialah modem, plotter, scanner dan lain lain sedangkan contoh dari DTE
ialah terminal di komputer.
Spesifikasi elektronik dari serial port merujuk pada Electronic Industry Association (EIA) :
1. “Space” (logika 0) ialah tegangan antara + 3 hingga +25 V. 2. “Mark” (logika 1) ialah tegangan antara –3 hingga –25 V.
5. Arus hubungan singkat tidak boleh melebihi 500mA.
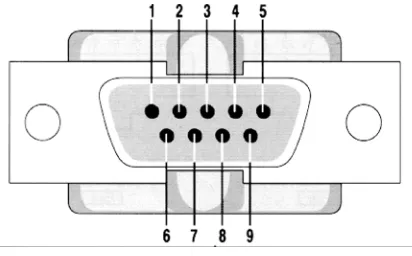
Komunikasi serial membutuhkan port sebagai saluran data. Berikut tampilan port serial DB9 yang umum digunakan sebagai port serial.
Gambar 2.12 Port DB9 Keterangan
· Pin 1 = Data Carrier Detect (DCD)
· Pin 2 = Received Data (RxD)
· Pin 3 = Transmitted Data (TxD)
· Pin 4 = Data Terminal Ready (DTR)
· Pin 5 = Signal Ground (common)
· Pin 6 = Data Set Ready (DSR)
· Pin 7 = Request To Send (RTS)
· Pin 8 = Clear To Send (CTS)
· Pin 9 = Ring Indicator (RI)
dan bit “Stop”. Ketika saluran transmisi dalam keadaan idle, output UART adalah dalam keadaan logika “1”.
Ketika Transmitter ingin mengirimkan data, output UART akan diset dulu ke logika “0” untuk waktu satu bit. Sinyal ini pada receiver akan dikenali sebagai sinyal “Start” yang digunakan untuk menyinkronkan fase clocknya sehingga sinkron dengan fase clock transmitter. Selanjutnya data akan dikirimkan secara serial dari bit yang paling rendah (bit0) sampai bit tertinggi. Selanjutnya akan dikirimkan sinyal “Stop” sebagai akhir dari pengiriman data serial.
Untuk dapat menggunakan port serial harus diketahui dahulu alamat dari port serial tersebut. Biasanya tersedia dua port serial pada CPU, yaitu COM1 dan COM2. Base Address COM1 biasanya 1016 (3F8h) dan COM2 biasanya 760 (2F8h). Alamat tersebut adalah alamat yang biasa digunakan, tergantung komputer yang digunakan.Tepatnya kita bisa melihat pada peta memori tempat menyimpan alamat tersebut, yaitu memori 0000.0400h untuk COM1 dan 0000.0402h untuk COM2.
Berikut adalah nama-nama register yang digunakan beserta alamatnya. Tabel 2.1 Nama register dan alamat register
Nama Register COM1 COM2
TX Buffer 3F8h 2F8h
RX Buffer 3F8h 2F8h
Keterangan Register :
RX Buffer, digunakan untuk menampung dan menyimpan data dari DCE.
TX Buffer , digunakan untuk menampung dan menyimpan data yang akan dikirim ke port serial.
Baud Rate Divisor Latch LSB , digunakan untuk menampung byte bobot rendah untuk pembagi clock pada IC UART agar didapat baud rate yang tepat.
Baud Rate Divisor Latch MSB , digunakan untuk menampung byte bobot tinggi untuk pembagi clock pada IC UART sehingga total angka pembagi adalah 4 byte yang dapat dipilih dari 0001h sampai FFFFh.
Berikut adalah tabel angka pembagi yang sering digunakan : Tabel 2.2 Tabel Baud Rate
Photo diode adalah diode sambungan p-n yang secara khusus dirancang untuk mendeteksi cahaya dan biasanya terdapat lapisan intrinsic antara lapisan p dan n. piranti yang memiliki lapisan intrinsic disebut pin atau PIN photodioda. Energi cayahanya lewat melalui lensa yang mengekspos sambungan.
Photodioda dirancang beroperasi pada mode bias-mundur. Arus bocor bias mundur meningkat dengan peningkatan level cahaya. Harga arus umumnya adalah dalam rentang micro-ampere. Photodioda mempunyai waktu respon yang cepat terhadap berbagai cahaya. Cahaya diserap pada daerah penyambungan atau daerah intrinsic menimbulkan pasangan electron-hole, kebanyakan pasangan tersebut menghasilkan arus yang berasal dari cahaya.
Photodioda dapat dioperasikan dalam 2 animal mode yang berbeda, yaitu :
1. Mode photovoltaic : seperti solar sell, penyerapan pada photodioda menghasilkan tegangan yang dapat diukur. Bagaimanapun, tegangan yang dihasilkan dan tenaga cahaya ini sedikit tidak linier, dan range perubahannya sangat kecil.
2. Mode photokonduktivitas : disini photodioda di aplikasikan sebagai tegangan revers (tegangan balik) dari sebuah diode (yaitu tegangan pada arah tersebut pada diode tidak akan menghantarkan tanpa terkena cahaya) dan pengukuran menghasilkan arus photo (hal ini juga bagus untuk mengaplikasikan tegangan mendekati 0)
Karakteristik bahan photodioda :
1. Silicon (Si)
Arus lemah sangat gelap, kecepatan tinggi, sensitivitas bagus antara 400nm sampai 1000nm (terbaik antara 800 nm sampai 900 nm).
2. Germanium (Ge)
Arus tinggi sangat gelap, kecepatan lambat, sensitivitas baik antara 600 nm sampai 1800 nm (terbaik 1400 nm sampai 1500 nm)
3. Indium gallium Arsennida (InGaAs)
Mahal, arus kecil saat gelap, kecepatan tinggi, sensitivitas baik pada jarak 800nm sampai 1700 nm (terbaik antara 1300 nm sampai 1600nm).
2.5 Dioda Pemancar Cahaya Infra merah (LED Infra merah)
Prinsip utama dari rangkaian sensor ini seperti layaknya sebuah saklar yang memberikan perubahan tegangan apabila terdapat penghalang diantara transceiver dan receiver. Sensor ini memiliki dua buah piranti yaitu rangkaian pembangkit/pengirim (Led Infra merah) dan rangkaian penerima (photodioda).
Rangkaian pembangkit/pengirim memancarkan sinar infra merah kemudian pancarannya diterima oleh penerima (photodioda) sehingga bersifat menghantar, akibatnya tegangan akan jatuh sama dengan tegangan ground (0). Dan sebaliknya apabila tidak mendapat pancaran sinar infra merah maka akan menghasilkan tegangan.
mata. Diode-dioda yang digunakan terbuat dari bahan Galium (Ga), Arsen (As), dan Fosfor (P) atau disingkat GaAsP. Tegangan maju antara anoda-katoda berkisar antara 1,5V-2V, sedangkan arus majunya berkisar 5mA-20mA. Led infra merah sesuai dengan rancangannya memancarkan cahaya pada spectrum infra merah dengan panjang gelombang λ=940 nm. Spectrum cahaya infra merah ini mempunyai level panas yang paling tinggi diantara sinar-sinar yang yang lain walaupun tidak tampak oleh mata dan mempunyai efek fotolistrik yang terkuat.
LED adalah diode yang menghasilkan cahaya saat diberi energi listrik. Dalam bias maju sambungan p-n terdapat rekomendasi antara electron bebas dan lubang (hole). Energi ini tidak seluruhnya diubah ke dalam bentuk energi cahaya atau photon melainkan dalam bentuk panas sebagian. Untuk diode yang memancarkan cahaya infra merah (infrared emiting diode = IRED). Sinar infra merah tidak dapat dilihat manusia, dengan menambahkan obat gallium arsenide dengan berbagai bahan dapat dibuat LED dengan output yang dapat dilihat seperti sinar merah, hijau, kuning, atau biru. Diode yang yang memancarkan cahaya (LED) digunakan untuk display alphabet dan digital serta sebagai lampu tanda.
energi cahaya dipancarkan untuk menghasilkan cahaya tampak. Jenis lain dari LED digunakan untuk menghasilkan energi tidak tampak seperti yang dipancarkan oleh laser atau infra merah.
Gambar 2.14 Simbol dan rangkaian dasar sebuah LED
Pemancar infra merah adalah diode solid state yang terbuat dari bahan
Galium Arsenida (GaAs)yang mampu memancrkan fluks cahaya ketika diode ini dibias maju. Bila diberi bias maju electron dari daerah –n akan menutup lubang electron yang ada di daerah p. Selama proses rekomendasi ini, energi dipancarkan dari permukaan p dan n dalam bentuk photon. Photon-photon yang dihasilkan ini ada yang diserap lagi dan ada yang meninggalkan permukaan dalam bentuk radiasi energi.
2.6 TRIAC
Pada sub bab ini membahas tentang pengertian TRIAC, karakteristik TRIAC, dan TRIAC jenis Optoisolators.
2.6.1 Pengertian TRIAC
Rectifier (SCR). Ketiganya merupakan sub-jenis dari Thyristor, piranti berbahan silikon yang umum digunakan sebagai saklar elektronik, disamping transistor dan
Field Effect Transistor (FET). Perbedaan diantara ketiganya adalah dalam penggabungan unsur-unsur penyusunnya, serta dalam segi arah penghantaran arus listrik yang melaluinya. TRIAC sebenarnya adalah gabungan dua buah SCR atau
Thyristor yang dirancang anti paralel dengan satu buah elektroda gerbang (gate electrode) yang menyatu. SCR merupakan piranti zat padat (solid state) yang berfungsi sebagai sakelar daya berkecepatan tinggi.
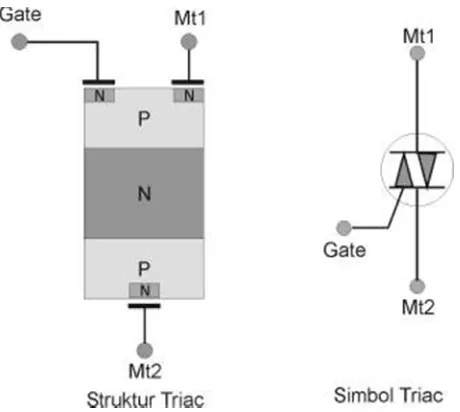
Gambar 2.15 Sruktur dan Simbol TRIAC
2.6.2 Karakteristik TRIAC
arah menunjukkan kemungkinan dua aliran arus antara terminal utama M1 dan M2. Pengaturan dilakukan dengan memberi sinyal antara gate(gerbang) dan M1.
Gambar 2.16 Karakteristik TRIAC
Karena dapat bersifat konduktif dalam dua arah, biasanya TRIAC digunakan untuk mengendalikan fasa arus AC. Selain itu, karena TRIAC merupakan
Gambar 2.17 Kuadran Operasi TRIAC
2.6.3 TRIAC Optoisolators
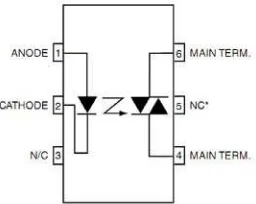
Triode Alternating Current(TRIAC) Optoisolatorsmerupakan jenis TRIAC yang mempunyai prinsip kerja seperti saklar elektronik yang diaktifkan oleh cahaya (LED). TRIAC ini tertanam bersama sebuah LED dalam sebuah rangkaian terintegrasi (Integrated Circuit). Perbedaan TRIAC Optoisolatorsdengan TRIAC biasa yaitu terletak dari cara pengaktifannya. TRIAC pada umumnya diaktifkan dengan cara memberi arus listrik secara langsung pada terminal gate TRIAC tersebut, sehingga mengakibatkan arus pada terminal M1 dan terminal M2 terhubung. Pada TRIAC Optoisolators, terminal gate tidak diberi arus listrik secara langsung, akan tetapi terminal gate yang berupa optik terisolasi diaktifkan oleh cahaya dari sebuah LED. Salah satu contoh dari IC TRIAC Optoisolators
adalah IC tipe MOC3011 yang mempunyai konfigurasi seperti gambar dibawah ini.
Gambar 2.18 Konfigurasi IC MOC 3011
TRIAC akan mengalirkan arus pada M1 dan M2 (pin 4 dan 6) apabila tidak ada arus yang mengalir pada pin1 dan 2 (LED padam). Apabila pada pin1 dan 2 diberi arus (LED menyala), maka TRIAC tidak akan mengalirkan arus pada M1 dan M2 (pin4 dan 6).
atas, mempunyai daerah tegangan kerja maksimal sebesar 250VAC. Berbeda halnya dengan TRIAC tipe MOC3041, TRIAC ini memiliki fitur lain. Selain bekerja dapat bekerja pada level tegangan 400VAC, MOC3041 memiliki rangkaian zero crossing. Rangkaian zero crossing ini berfungsi untuk mendeteksi perpotongan gelombang sinus pada tegangan AC dengan titik nol pada tegangan tersebut (zero point), sehingga dapat memberikan acuan untuk memulai waktu pen-trigger-an. Konfigurasi IC MOC3041 dan rangkaian TRIAC Opto Osillator
ini dapat dilihat pada gambar di bawah ini.
Gambar 2.19 Bentuk dan Konfigurasi IC MOC3041
TRIAC Optoisolatorsbanyak diaplikasikan pada Selenoid/Valve Controls, Lighting Controls, Statics Power Switches, AC Motor Drivers, Temperature
Gambar 2.20 Rangkaian aplikasi TRIAC Optoisolatorsuntuk kontrol Untuk mengontrol tegangan AC dapat dilakukan dengan cara memberikan sinyal PWM pada Pin 2 pada IC MOC3041.
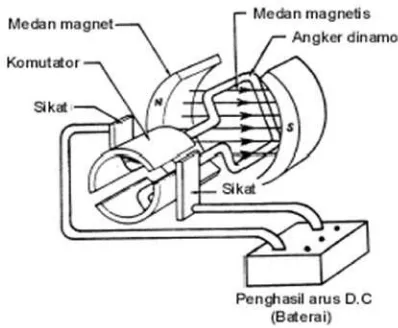
2.7 Motor DC
Gambar 2.21 Mekanik Motor DC Mekanisme kerja untuk seluruh jenis motor secara umum :
Arus listrik dalam medan magnet akan memberikan gaya.
Jika kawat yang membawa arus dibengkokkan menjadi sebuah lingkaran /
loop, maka kedua sisi loop, yaitu pada sudut kanan medan magnet, akan mendapatkan gaya pada arah yang berlawanan.
Pasangan gaya menghasilkan tenaga putar / torque untuk memutar kumparan.
Motor-motor memiliki beberapa loop pada dinamonya untuk memberikan tenaga putaran yang lebih seragam dan medan magnetnya dihasilkan oleh susunan elektromagnetik yang disebut kumparan medan.
2.8 IC L293D (Driver Motor DC)
pengganti transistor sebagai saklar dengan kecepatan switching mencapai 5kHz. Driver tersebut berupa dua pasang rangkaian h-bridge yang masing-masing dikendalikan oleh enable 1 dan enable 2.
Gambar rangkaian dan cara kerjanya adalah dengan memberikan tegangan 5V sebagai Vcc pada pin 16 dan 9 Volt pada pin 8 untuk tegangan motor, maka IC siap digunakan. Saat terdapat tegangan pada input 1,2, dengan memberikan logika tinggi pada enable1 maka output 1,2 akan aktif. Sedangkan jika enable1 berlogika rendah, meskipun terdapat tegangan pada input1 dan 2 output tetap nol(tidak aktif). Hal ini juga berlaku untuk input dan output 3,4 serta enable2. Konfigurasi pin ICL293D tersebut dapat dilihat lebih jelas pada gambar berikut :
40 3.1 Definisi Perancangan
Perancangan adalah proses menuangkan ide dan gagasan berdasarkan
teori-teori dasar yang mendukung. Proses perancangan dapat dilakukan dengan cara
pemilihan komponen yang akan digunakan, mempelajari karakteristik dan data
fisiknya, membuat rangkaian skematik dengan melihat fungsi-fungsi komponen
yang dipelajari, sehingga dapat dibuat alat yang sesuai dengan spesifikasi yang
diharapkan.
Pada tahap perancangan ini dibagi menjadi 3 tahap perancangan. Tahap
pertama adalah perancangan perangkat keras (hardware), yang meliputi
perancangan bagian elektronik dan perancangan bagian mekanik. Tahap kedua
3.2 Skematik Denah Penempatan Alat
Gambar di bawah merupakan penempatan alat yang akan dirancang.
Gambar 3.1 Denah Penempatan Alat
Pada bagian pintu gerbang masuk terdapat 3 sensor infra merah. Sensor
infra merah pertama diletakan di sebelum pintu gerbang, sensor ini berfungsi
untuk mendeteksi mobil yang akan memasuki kantor. Kemudian sensor infra
merah kedua diletakan di setelah pintu gerbang masuk, sensor ini berfungsi untuk
memdeteksi mobil yang telah melewati pintu gerbang masuk. Diantara sensor
infra merah pertama dan kedua, terdapat sensor infra merah lain, yaitu berfungsi
untuk mendeteksi ada tidaknya objek yang menghalangi pintu gerbang.
Sama halnya dengan pintu gerbang masuk, pada bagian pintu gerbang
keluar terdapat 3 sensor infra merah. Sensor infra merah pertama diletakan di
sebelum pintu gerbang, sensor ini berfungsi untuk mendeteksi mobil yang akan
pintu gerbang, sensor ini berfungsi untuk memdeteksi mobil yang telah melewati
pintu gerbang keluar. Diantara sensor infra merah pertama dan kedua, terdapat
sensor infra merah lain, yaitu berfungsi untuk mendeteksi ada tidaknya objek yang
menghalangi pintu gerbang.
Pada bagian pintu ruangan, terdapat 3 buah sensor infra merah, yaitu untuk
mendeteksi orang yang akan memasuki atau keluar dari ruangan, fungsi sensor
tersebut adalah untuk menambah intensitas cahaya lampu ataupun mengurangi
intensitas cahaya lampu.
3.3 Perancangan Perangkat Keras (Hardware)
Seluruh perangkat atau komponen yang digunakan dalam perancangan alat
ini tersusun seperti pada blok diagram di bawah ini :
Blok diagram diatas memiliki 2 buah mikrokontroler, secara garis besar dapat
dijelaskan sebagai berikut :
1. Sensor Kendali Pintu Gerbang terdiri dari 3 buah rangkaian sensor infra
merah.
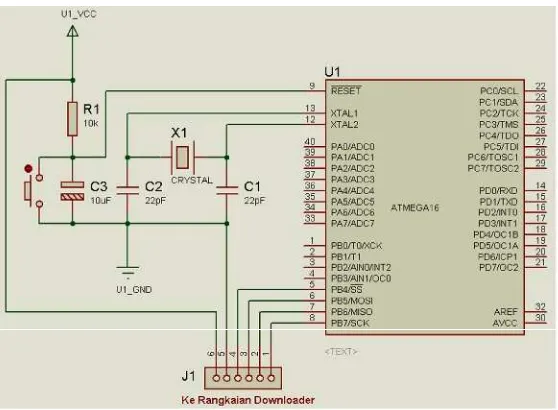
3.3.1 Perancangan Rangkaian Sistem Minimum AVR ATMega16
Terdapat 2 buah rangkaian system minimum di dalam perancangan alat ini.
Mikrokontroler pertama digunakan untuk mengendalikan pintu gerbang masuk
dan pintu gerbang keluar. Berikut adalah gambar rangkaian system minimum
mikrokontroler ATmega16.
Gambar 3.3 Rangkaian Sistem Minimum 1 AVR ATMega16
Kristal yang digunakan pada rangkaian sistem minimum di atas,
mengunakan frekuensi 11.0592 MHz. Kristal tersebut digunakan untuk
pembangkit clock (osilator), dimana setiap 1 intruksi/perintah dalam program dieksekusi dalam 1 siklus clock. Pin RESET dihubungkan dengan rangkaian kombinasi RC dan push button, yang bertujuan agar mikrokontroler dapat di-reset.Fungsi dari port - portlainnya adalah sebagai berikut.
2. PORTB 0…5, digunakan sebagai pin masukkan untuk 3 buah sensor dan 2 buah push button.
3. PORTC 0…6, digunakan sebagai pinkeluaran untuk driver motor DC.
4. PORTD 0…1, digunakan sebagai pinkomunikasi dengan komputer.
Kemudian untuk rangkaian system minimum kedua adalah sebagai berikut.
Gambar 3.4 Rangkaian Sistem Minimum 2 AVR ATMega16
Kristal yang digunakan pada rangkaian sistem minimum di atas,
mengunakan frekuensi 11.0592 MHz. Kristal tersebut digunakan untuk
pembangkit clock (osilator), dimana setiap 1 intruksi/perintah dalam program dieksekusi dalam 1 siklus clock. Pin RESET dihubungkan dengan rangkaian kombinasi RC dan push button, yang bertujuan agar mikrokontroler dapat di-reset.Fungsi dari port - portlainnya adalah sebagai berikut.
1. PORTA 5..7, digunakan sebagai pin masukkan untuk 3 buah sensor.
2. PORTB 0…6, digunakan sebagai pin keluaran pada seven segment.
3. PORTD 0…1, digunakan sebagai pin komunikasi dengan computer
3.3.2 Perancangan Rangkaian Downloader
Rangkaian downloader merupakan rangkaian penghubung antara komputer dan mikrokontroler yang berfungsi untuk memasukan listingprogram (berupa bit – bitlogika) ke dalam mikrokontroler.Listingprogram yang dikirim oleh software dari komputer ke dalam mikrokontroler biasanya berbentuk file *.hex (heksadesimal). Pada umumnya rangkaian downloader terdiri dari kabel penghubung jenis DB25 atau jenis DB9. Sinkronisasi tegangan antara tegangan
dari komputer dan tegangan mikrokontroler menggunakan sebuah buffer. Rangkaian downloaderditunjukkan seperti Gambar 3.4 dan Gambar 3.5.
Gambar 3.6 Rangkaian Downloader (Mikrokontroler)
Rangkaian di atas menggunakan sebuah port DB25 sebagai alat penghubung
antara komputer dan rangkaian downloader, sedangkan IC 74HCT244 digunakan
sebagai buffer. Software yang digunakan untuk men-download program (file: *.hex) ke dalam mikrokontroler ini adalah ISP Programmer (Adam Dybkowsky).
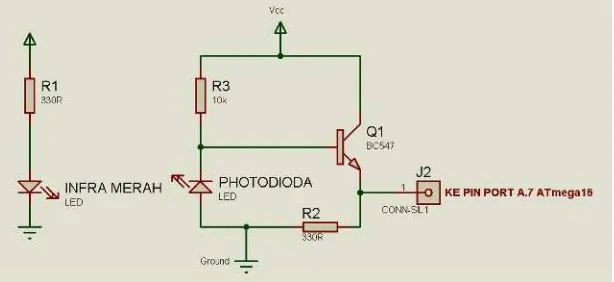
3.3.3 Perancangan Rangkaian Sensor Infra Merah
Pada tugas akhir ini digunakan sensor infra merah sebagai
sensorpendeteksi. Ada dua jenis pendeteksian yaitu pendeteksi kendaraan dan
pendeteksi orang. Sensor ini akan bekerja bila terdapat penghalang pada sensor
tersebut. Dibawah ini merupakan gambar rangkaian sensor infra merah serta
penghubungan PORT pada mikrokontroler ATmega16.
Gambar 3.8 Hubungan Rangkaian Sensor Infra Merah A1 dengan ATmega
Gambar 3.10 Hubungan Rangkaian Sensor Infra Merah 1A dengan ATmega
Gambar 3.11 Hubungan Rangkaian Sensor Infra Merah B1 dengan ATmega16
Gambar 3.13 Hubungan Rangkaian Sensor Infra Merah 1B dengan ATmega16
Gambar 3.14 Hubungan Rangkaian Sensor Infra Merah C1 dengan ATmega16
Gambar 3.15 Hubungan Rangkaian Sensor Infra Merah C2 dengan ATmega 16
Gambar-gambar di atas merupakan rangkaian sensor infra merah serta
penghubungan ke Pin PORTA.0…7. Pada rangkaian tersebut menggunakan
sebagai switch. Prinsip kerja dari rangkaian sensor ini yaitu ketika diberikan input
5V maka sensor infrared akan aktif memancarkan sinyal listrik ke photodiode,
maka tahanan dari photodiode kecil sehingga arus pada transistor kecil, ini
mengakibatkan transistor tidak bekerja maka keluaran port tersebut low. Dan apabila infrared terhalang maka tahanan pada photodiode besar sehingga arus
pada transistor besar, ini mengakibatkan transistor dapat bekerja, maka keluaran
pada port tersebut high dan sinyal high tersebut masuk ke mikrokontroler, sehingga mikrokontroler akan bekerja sesuai program yang telah diatur.
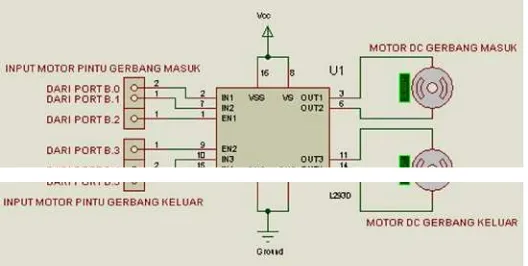
3.3.4 Perancangan Rangkaian Driver Motor DC
Rangkaian driver motor DC digunakan untuk menggerakan pintu gerbang
masuk dan keluar. Rangkaian driver ini menggunakan IC L293D. dengan sebuah
IC driver motor ini, rangkaian dapat melayani dua buah motor DC. Motor akan dikendalikan dari inputan yang berlogika high atau low. Dibawah ini adalah bentuk dari rangkaian driver motor menggunaka IC L293D.
Gambar 3.16 Rangkaian Driver Motor DC
Rangkaian driver ini berfungsi untuk menggerakan motor sesuai dengan input yang diterimanya. Rangkaian bertindak sebagai pengatur arah kerak motor
tersebut bekerja dengan system switching. Jika inputnya diberi logika input 1,
maka input 2 adalah low, sehingga perputaran motor DC bergerak forward. Sedangkan jika input 1 diberi logika low dan input 2 diberi logika high, maka
perputaran motor DC adalah reverse.
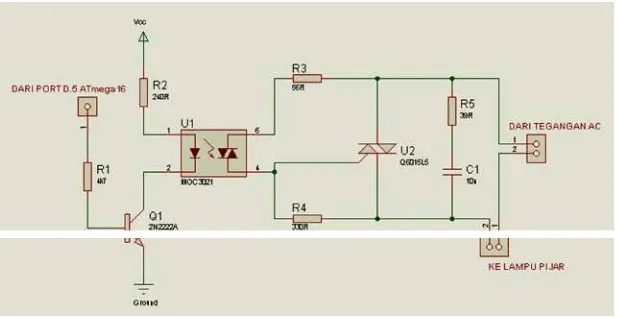
3.3.5 Perancangan Rangkaian Driver Lampu
Komponen utama dari rangkaian driver lampu ini adalah IC TRIAC Optoisolators Tipe MOC3041 dan TRIAC Tipe BT137. TRIAC Optoisolators yang digunakan telah memiliki rangkaian zero crossing di dalamnya.. Rangkaian
driver lampu akan lampu jika pin 2 pada IC MOC3041 diberi logika “0” (low). Bit– bit logika yang diberikan pada IC tersebut berupa sinyal PWM yang diatur oleh register pada mikrokontroler. Rangkaian driver lampu ini ditunjukkan oleh Gambar 3.12 di bawah ini.
Gambar 3.17 Rangkaian Driver Lampu
3.3.6 Perancangan Rangkaian Komunikasi Serial DB9
Konektor db9 memiliki 9 buah pin, tidak semua pin-pin nya kita gunakan
sebagai Transmitter data(TXD) dan pin 5 sebagai ground. Fungsi IC Max 232
adalah sebagai pengubah level tegangan TTL yang keluar dari serial Rs 232
komputer (com1/com2)dan IC max232 ini mempunyai 16 pin. Output dari Rs 232
komputer dihubungkan dengan konektor DB9.
Gambar 3.18 Rangkaian Komunikasi Serial DB9
3.3.7 Perancangan Rangkaian Seven Segment
Untuk rangkaian seven segment hanya membutuhkan transistor jenis PNP type
SS9012 dan tahanan sebesar 470 ohm. Cara keraja dari rangkaian seven segment
ini adalah jika pada kaki basis mendapatkan logika low, maka sevent segment
akan nyala, sebaliknya jika pada kaki basis transistor diberi logika high, maka
Gambar 3.19 Rangkaian Seven Segment
3.4 Perancangan Perangkat Lunak
Terdapat 2 macam program pada aplikasi ini, yaitu perancangan program
pada mikrokontroler dan perancangan program pada Borland Delphi 7.
3.4.1 Perancangan Program Mikrokontroler
Rancangan program ini dibuat kedalam bentuk flowchart, guna mempermudah proses pembuataan listing program pada software Code Vision AVR. Program mikrokontroler yang akan dibuat menggunakan bahasa C dan
beberapa bahasa assembly, kemudian program tersebut disusun (compile) secara otomatis ke dalam bentuk file *.hex untuk dimasukan ke dalam IC mikrokontroler.
Listingprogram meliputi program sensor, program driver motor DC, program PWM dan program pengaturan optoisolator lampu. Setelah perancangan
program-program tersebut selesai, maka akan dilakukan pengisian program-program pada
3.4.2 Perancangan Program Delphi 7
Rancangan program ini dibuat kedalam bentuk flowchart, guna mempermudah proses pembuataan listingprogram padaBorland Delphi 7.
Berikut adalah gambar tampilan aplikasi pengontrol dan monitoring
pada program Delphi 7.
Gambar 3.23 Tampilan aplikasi Delphi
Keterangan gambar :
Label ‘waktu sekarang’: menunjukan waktu berupa tanggal dan jam pada
saat sekarang
‘Waktu Selesai’ : merupakan timer, batas akhir aplikasi alat bekerja.
Panel ‘deteksi sensor‘ : merupakan sitem penerima data dari sensor-sensor
yang bekerja (aktif). Pada bagian ‘pintu gerbang
masuk’ dan ‘pintu gerbang keluar’ terdapat kolom
yang menunjukan kapan sensor itu aktif (data
karyawan terdapat angka yang menunjukan berapa
banyak orang yang berada di ruangan tersebut.
Panel ‘tombol kontrol’ : merupakan kumpulan tombol untuk member
perintah pada alat. Pada bagian pintu gerbang
‘masuk’ dan ‘keluar’ terdapat tombol ‘buka’ dan
tombol ‘tutup’. Tombol ini akan member perintah
pada pintu gerbang untuk melakukan buka atau
tutup. Kemudian pada bagian panel ‘lampu ‘
terdapat tombol ‘nyala’ dan ‘padam’. Fungsi dari
tombol ini adalah memberikan perintah pada lampu
agar nyala atau mati.
Tombol ‘simpan’ : merupakan tombol untuk menyimpan semua data
yang telah terjadi.
Tombol ‘keluar’ : merupakan tombol untuk keluar dari aplikasi
61
PENGUJIAN DAN ANALISA
Langkah pengujian bertujuan untuk mendapatkan data-data sejauh
mana sistem berfungsi sesuai dengan rancangan serta mengetahui letak
kesalahan bila sistem yang dibuat ternyata tidak sesuai dengan yang
diharapkan dan selanjutnya mengambil kesimpulan terhadap
langkah-langkah yang harus diambil dalam rangka memperbaiki kesalahan
tersebut.
4.1 Pengujian Rangkaian Mikrokontroler ATmega16
Rangkaian ini merupakan otak dari seluruh rangkaian. Semua
rangkaian yang ada dikendalikan input outputnya oleh rangkaian
mikrokontroler ini. Mini sistem menggunakan IC ATMega16 dengan
alasan program bisa dihapus secara berulang-ulang. Proses pengujian
rangkaian ini adalah dengan menghubungkan setiap PORT dengan
beberapa LED. Setiap pin pada mikrokontroler dihubungkan dengan kakai
katode LED. Kemudian kaki anoda LED dihubungkan ke resistir 470 ohm
kemudian dihubungkan ke tegangan 5 Volt. Dengan mengisikan sebuah
program sederhana untuk menyalakan setiap LED, maka rangkaian
Berikut Tabel hasil pengujian rangkaian mikrokontroler ATmega16 :
Tabel 4.1 Pengujian Pada Rangkaian Mikrokontroler
Nama PORT Kondisi LED 1-8
PORTA.0 – PORTA.7 Nyala
PORTB.0 – PORTB.7 Nyala
PORTC.0 – PORTV.7 Nyala
PORTD.0 – PORTD.7 Nyala
Dengan melihat hasil pada tabel diatas, rangkaian mikrokontoler telah
sesuai dengan program yang dibuat, itu tandanya setiap input/output pada setiap
PORT bekerja dengan baik, maka mikrokontoler siap digunakan.
4.2 Pengujian Rangkaian Downloader
Karena pemogramana alat ini menggunakan mode ISP (In System
Programming), maka mikrokontroler harus dapat diprogram langsung pada papan
rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program
downloader. Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis
mikrokontroler oleh program downloader, yaitu Atmega16.
Atmega menggunakan kristal dengan frekuensi 11 059 2 Mhz,
apabila Chip Signature sudah dikenali dengan baik, maka bisa dikatakan
bahwa rangkaian downloader mikrokontroler bekerja dengan baik dengan
mode ISP-nnya.
4.3 Pengujian Pada Rangkaian Sensor Infra Merah
Pada perancangan ini menggunakan 9 buah sensor infra merah. 3
buah sensor infra merah diletakan di pintu gerbang masuk perkantoran, 3
buah sensor infra merah diletakan di pintu gerbang keluar dari
perkantoran, dan 3 buah sensor infra merah diletakan di pintu ruang kerja.
Sensor ini terdiri dari 2 bagian, yaitu bagian pengirim dan bagian
penerima. Pada bagian pengirim menggunakan cahaya infra merah yang
dihubungkan ke resistor serta vcc, dan ground. Pada bagian penerima
menggunakan photodiode, dan tegangan yang dihasilkan dihubungkan ke
transistor 2N2222A. Pengujian dilakukan dengan memberikan objek yang
Berikut adalah hasil pengujian pada setiap rangkaian sensor infra merah.
1. Pengujian Sensor Infra Merah Pada Pintu Gerbang Masuk
Tabel 4.2 Sensor Pada Pintu gerbang masuk
Nama Sensor Infra Merah Kondisi Tidak Terhalang
Sensor 1A (Sensor pengaman pintu gerbang
masuk) 4.99 0.134
2. Pengujian Sensor Infra Merah Pada Pintu Gerbang Keluar
Tabel 4.3 Sensor Pada Pintu Gerbang Keluar
Nama Sensor Infra Merah Kondisi Tidak Terhalang
Sensor 1B (Sensor pengaman pintu gerbang
keluar) 4.99 V 0.222
3. Pengujian Sensor Infra Merah Pada Pintu Ruangan
Tabel 4.4 Sensor Pada Pintu Ruangan
Nama Sensor Infra Merah Kondisi Tidak Terhalang
Kondisi Terhalang
Sensor C1 (Sensor Penampil 7 Segment) 5.01 V 0.236 V
Sensor C2 (Sensor pengendali Lampu) 4.96 V 0.004 1 V
C3 (Sensor Penampil 7 Segment) 4.99 V 0.314 V
Melihat dari data-data diatas, ketika sensor dalam keadaan normal (tidak
diberi objek penghalang, tegangan yang dihasilkan adalah low. Karena
prinsip kerja dari rangkaian ini adalah aktif low, maka dapat diambil
kesimpulan bahwa setiap sensor bekerja dengan baik dan siap digunakan.
4.4 Pengujian Rangkaian Optoisolator
Rangkaian optoisloator adalah driver untuk mengendalikan intensitas
cahaya lampu pijar. Semakin besar tegangan pada kaki keluarannya, maka
semakin terang daya yang seharusnya dipancarkan oleh lampu pijar. Terdapat 4
level intensitas cahaya yang ingin dihasilkan oleh lampu pijar.
Berikut adalah hasil pengujian rangkaian tersebut :
Tabel 4.5 Rangkaian Optoisolator
Dari hasil pengujian didapatkan nilai seperti tabel diatas. Hasil
tersebut tidak sesuai dengan apa yang diinginkan. Seharusnya tegangan
yang keluar dari rangkaian optoisolator berubah-ubah. Hal itu akan
membuat intensitas cahaya lampu berbeda. Namun perubahan yang terjadi
bukanlah intensitas melainkan berupa kecepatan kedipan pada setiap
tahapnya.
4.5 Pengujian Rangkaian Seven Segment
Seven segment yang digunakan adalah seven segment common
anoda pada LED tiap segmennya digabungkan. Agar seven segment dapat
menyala, maka seven segment harus diberi logika high.
Berikut adalah keterangan untuk menampilkan angka 0-9 pada seven
segment :
Tabel 4.6 Penampil Angka pada Seven Segment
Angka Bit 6
Selain dapat menampilkan angka, seven segment juga dapat menampilkan
karakter huruf. Dalam menampilkan karakter huruf,setiap masukan pada bit harus
disesuaikan. Karena pada rancangan ini karakter huruf tidak digunakan, maka
pengujian hanya dalam menampilkan angka 0-9 saja.
4.6 Pengujian Rangkaian Driver Motor DC
Pada Rangkaian ini terdapat sebuah IC L293D sebagai driver motor DC
dan dua buah motor DC yang berfungsi menggerakkan pintu otomatis. Dengan
melakukan sebuah percobaan dengan memberi input 0 atau 1 pada IC L293D
Tabel 4.7 Rangkaian Driver Motor
PIN L293D Kondisi
Motor Enable 1 Input 1 Input 2
0 0 0 Diam
Enable 2 Input 1 Input 2
0 0 0 Diam
memiliki tegangan high agar dapat memutarkan motor. Putaran arah motor
ditentukan oleh kaki input 1 dan input 2. Secara keselurahan, rangkaian
driver motor DC siap untuk digunakan.
4.7 Pengujian Rangkaian Komunikasi RS232
Fungsi dari rangkaian ini adalah agar terjadi proses pengiriman dan
penerimaan data baik itu dari PC ke mikrokontroler ataupun dari
mikrokontroler ke PC. Pengujian rangkaian ini adalah dengan
Berikut hasil pengujiannya :
1. Penyesuaian COM PORT pada PC
Gambar 4.2 COMM yang digunakan
Komunikasi yang digunakan adalah menggunakan kabel serial DB9
sebagai penghubung. Terminal COM yang terdeteksi adalah COM1.
2. Pengaturan Baudrate
Gambar 4.3 Pengaturan Bit Baudrate
Gambar diatas merupakan pengaturan agar komunikasi dapat
bekerja. Bit Baudrate yang digunakan adalah 9600, karena selain baudrate
yang terdapat di rangkaian mikrokontroler juga diatur dengan baudrate
9600.
3. Hyperterminal dalam keadaan normal
Gambar 4.4 Tampilan Hyperterminal
4. Hyperterminal ketika terdapat penekanan huruf “a” dan “b”
padaKeyboard
Gambar 4.5 Tampilan Komunikasi
Pada program mikrokontroleer telah dimasukan berupa program
sederhana utuk menguji rangkaian komunikasi serial RS232. Yaitu ketika
“huruf_a”, kemudian jika terjadi penekanan huruf b pada keyboard maka
mengirimkan data berupa tulisan “huruf_b”.
Ketika dilakukan pengujian pada hyperterminal, tampilan yang
dihasilkan terdapat pada gambar diatas. Sehingga dapat diambil
kesimpulan bahwa rangkaian komunikasi RS232 dapat digunakan karena
proses komunikasi antara PC dengan rangkaian mikrokontroler bekerja
dengan baik.
4.8 Pengujian Program Delphi
Mikrokontroler terhubung dengan rangkaian RS232 yang berfungsi
sebagai sarana komunikasi antara rangkaian mikrokontroler dengan komputer.
Dalam hal ini program pada computer adalah program Borland Delphi 7.
Ketika sensor infra merah berlogika ‘1’, maka mikrokontroler akan
menerima data dan mengirimkannya ke computer melalui rangkaian RS232.
Pada gambar di atas dapat dilihat tampilan pada PC ketika alat
belum mendapatkan reaksi apapun.
Ketika alat mendapatkan reaksi dan mengirimkan data pada
computer maka tampilan Delphi pada PC menjadi seperti gambar berikut :
Gambar 4.7 Tampilan Program Delphi Saat Aktif
Pada bagian ‘Deteksi Sensor Pintu Gerbang Masuk’ terdapat
sensor yang telah mendeteksi adanya objek yang melewatinya. Itu
tandanya bahwa pada pukul ‘7:12:11 AM’ telah terdapat mobil yang
memasuki area perkantoran. Demikian pula jika terdapat sensor yang
mendeteksi kembali. Pada ‘Panel Pengendalian’ dapat dijalankan dengan
72 5.1 Kesimpulan
Setelah melakukan pengujian terhadap alat rancangan, penulis dapat
mengambil beberpa kesimpulan, diantaranya :
1. Penggunaan 2 buah mikrokontroler lebih efektif dibandingkan
menggunakan 1 buah mikrokontroler.
2. Jalannya program dapat berjalan secara bersamaan tanpa menunggu
eksekusi program lainnya.
3. Sensor infra merah dapat dijadikan sebagai sensor pendeteksi
kendaraan dan pendeteksi orang.
4. Kelemahan sensor infra merah adalah mudah terganggu oleh cahaya
luar lainnya.
5. Program Borland Delphi dapat dijadikan sebagai alat monitoring dan
sebagai pengendali alat jika terjadi error pada sensor.
5.2 Saran
Pada bab ini penulis ingin memberikan masukan-masukan yang nantinya
dapat dijadikan pemikiran dalam perancangan alat otomatisasi selanjutnya.
Masukan-masukan tersebut diantaranya adalah :
1. Pengendalian intensitas lampu pijar dapat diperbanyak ke semua ruangan.
2. Penggunaan sensor sebaiknya bisa dioptimalkan dengan menambah
73 Sumber Buku :
Heri Andrianto. 2007. Pemrograman Mikrokontroler AVR Atmega16:
Menggunakan Bahasa C (CodeVision AVR).Jakarta : Informatika.
Wahana Komputer.2007. Teknik Antar Muka Mikrokontroler dengan
Komputer Berbasis Delphi .Jakarta. Salemba Infotek.
Andi. 2009. Aplikasi Cerdas Menggunakan Delphi. Semarang. Wahana
Komputer.
Sumber Artikel atau lainnya :
http://www.elektro.undip.ac.id/kenung/?p=1070
http://blackbox86.blogspot.com/2011/02/basic-microcontroller-7-segment.html
http://www.avrku.com/2009/09/driver-beban-ac-tanpa-relay.html
http://www.nxp.com/acrobat_download/datasheets/BT136_SERIES_D_2.pdf
http://electronicandlife.blogspot.com
/2010/04/rangkaian-sensor-infra-merah-skema.html
I. IDENTITAS DIRI
Nama Lengkap : Iip Irmansyah
Nim : 13106022
Tampat, Tanggal Lahir : Kuningan, 06 Januari 1988
Agama : Islam
Jenis Kelamin : Laki-laki
Status : Mahasiswa
Alamat Asal : Blok Desa RT 06/02 No 145 Desa
Dukuhpicung Kec Luragung Kab
Kuningan Jawa Barat.
No. Handphone : 085624818101
2000 – 2003 : SLTPN 2 Luragung
2003 – 2006 : SMKN 3 Kuningan