SISTEM PENGENDALI LINE FOLLOWER PENGANGKAT
BARANG
TUGAS AKHIR
SISKA AGUSTINA SIREGAR
122408027
PROGRAM STUDI D-3 FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
SISTEM PENGENDALI LINE FOLLOWER PENGANGKAT
BARANG
TUGAS AKHIR
Diajukan Untuk Melengkapi Tugas Dan Memenuhi Syarat Memperoleh Ahli Madya
SISKA AGUSTINA SIREGAR
122408027
PROGRAM STUDI D-3 FISIKA DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : Sistem Pengendali Line Follower Pengangkat Barang
Kategori : Tugas Akhir
Nama : SISKA AGUSTINA SIREGAR
Nomor Induk Mahasiswa : 122408027
Program Studi : Diploma 3 (D-3) Fisika
Departemen : Fisika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatra Utara
Diluluskan di Medan, 28 Juli 2015
Disetujui Oleh
Ketua Program Studi Pembimbing,
LEMBAR PERNYATAAN
SISTEM PENGENDALI LINE FOLLOWER PENGANGKAT BARANG
TUGAS AKHIR
Saya mengakui bahwa tugas akhir ini adalah hasil karya sendiri. Kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, 28 Juli 2015
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Kuasa, dengan limpahan berkat-NYA penyusunan Tugas Akhir ini dapat diselesaikan dalam waktu yang ditetapkan yang berjudul “SISTEM PENGENDALI LINE FOLLOWER PENGANGKAT BARANG”. Tugas Akhir ini disusun sebagai syarat akademis dalam menyelelesaikan studi program Diploma (D-3) jurusan Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara. Penulis menyadari bahwa selama proses hingga terselesaikannya penyusunan tugas akhir ini banyak mendapat kontribusi dari berbagai pihak. Dengan kerendahan hati, penulis ingin menyampaikan rasa terima kasih yang sebesar-besarnya atas segala bantuan, dukungan secara saran yang telah diberikan. Oleh karena itu dalam kesempatan ini penulis menyampaikan terima kasih kepada:
1. Bapak Prof. Dr. Sutarman, M.Sc, selaku Dekan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
2. Ibu Dr.Marpongahtun,M.Sc selaku Pembantu Dekan I Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara. 3. Ibu Dr. Susilawati, M.Si selaku ketua Program Studi D-3 Fisika
Fakultas Matematika dan Ilmu Pengetahuan Alam universitas Sumatera Utara.
8. Teman-teman semasa PKL Irda, Dani, Rudi yang telah memberikan kesan dan kenangan manis selama mengisi hari-hari di tempat PKL. 9. Teman separtner proyek Arman Hidayat Sirait yang telah memotivasi,
mendampingi dan memberikan semangat dalam pengerjaan proyek ini. 10.Teman terbaik di perkuliahan Putri, Dani, Ilfa, Rudi, Dondo, Alboin,
Marina, Gunawan, Sevni, Fitri, Yosef, Armansyah dan Kak Ana yang selalu memberikan tawa dan tangis selama di bangku perkuliahan dan seluruh rekan FIN 12 yang tidak dapat disebutkan satu per satu
11.Adik saya Roni Parulian Siregar dan Rio Vernandes Siregar yang bersikap dewasa memberikan saran dan pujian yang membangkitkan semangat penulis untuk menyelesaikan tugas akhir ini.
12.Kakak dan Abang saya Eka Nabasaria Siregar dan Rido Winson Siregar yang selalu menghibur dan memberikan semangat motivasi pada penulis
13.Semua pihak yang tidak dapat disebutkan satu per satu, terima kasih atas semua bantuannya dalam menyelesaikan laporan proyek ini.
SISTEM PENGENDALI LINEFOLLOWER PENGANGKAT BARANG ABSTRAK
Robot Pengikut Garis merupakan suatu bentuk robot bergerak otomatis yang mempunyai misi mengikuti suatu garis pandu yang telah ditentukan secara otonom. Dalam perancangan dan implementasinya. Dalam proyek ini akan dibahas mengenai robot Line Follower. Robot ini merupakan salah satu bentuk robot beroda yang memiliki komponen utama diantaranya, seperti resistor, dioda, transistor, Led yang dirangkai untuk menghasilkan jenis kendaraan yang berjalan secara otomatis dengan kecepatan tertentu mengikuti garis. Tujuan penelitian ini adalah merancang dan mengimplementasikan suatu Robot Pengikut Garis dengan menggunakan mikrokontroler ATMEGA16 dan sensor infra merah.
Sistem mekanik robot mengadopsi sistem maneuver pada mobil empat roda biasa. Agar robot memiliki kemampuan bermanuver tinggi dan dapat dikontrol relative mudah, sistem kemudi yang digunakan dalam penelitian ini adalah jenis diferensial : Robot memiliki dua roda utama yang digerakan oleh sistem penggerak (motor DC) tersendiri dan satu buah kastor sebagai roda penyeimbang. Hasilnya memperlihatkan bahwa robot mampu menjejak garis hitam pada bidang warna putih (atau sebaliknya: garis putih pada bidang warna hitam). Hasil uji coba rangkaian Line Follower ini menunjukkan performa yang mampu berjalan di beberapa medan, diantaranya medan lurus, belok, naik, dan menurun.
DAFTAR ISI
2.8 Mikrokontroler ATMega16 ... 18
2.9 Fitur mikrokontroler ATMega 16 ... 19
2.10 Konfigurasi Pin ATMega 16 ... 21
2.11 Peta Memori ATMega16 ... 24
2.12 Motor Stepper... 27
2.12.1. Kelebihan Motor Steper ... 27
2.12.2. Prinsip Kerja Motor Stepper ... 28
2.12.3. Jenis-Jenis Motor Stepper ... 28
2.12.4. Motor Stepper Variabel Reluctance (VR) ... 29
2.12.5. Motor Stepper Permanent Magnet (PM) ... 29
2.12.6. Motor Stepper Hybrid (HB) ... 30
2.12.7. Motor Stepper Unipolar ... 31
2.12.8. Motor Stepper Bipolar ... 32
2.13. Motor DC ... 33
2.14. Bahasa Pemograman Bascom-AVR ... 35
BAB 3. PERANCANGAN DAN PEMBUATAN ... 38
3.1. Diagram Blok Sistem ... 38
3.2. Rangkaian Sensor Inframerah Sensor Garis dan Sensor Barang ... 39
3.3. Rangkaian LCD Karakter 16x2... 41
3.4. Rangkaian Minimum Sistem AtMega16... 42
3.5. Flowchart Sistem... 43
BAB 4. HASIL DAN PEMBAHASAN ... 44
4.1. Pengujian Rangkaian Catu Daya... 44
4.2. Pengujian Rangkaian Mikrokontroler ... 45
4.4. Pengujian Rangkaian L293D ... 48
BAB 5. PENUTUP... 50
5.1. Kesimpulan ... 50
5.2. Saran ... .. 50
DAFTAR PUSTAKA ... 51
LAMPIRAN
DAFTAR TABEL
DAFTAR GAMBAR
Gambar 2.10 Motor stepper tipe variable reluctance (VR)……… 29
Gambar 2.11 Motor stepper tipe permanent magnet (PM……….. 30
Gambar 2.12 Motor stepper tipe hibrid……….….. 31
Gambar 2.13 Motor stepper dengan lilitan unipolar………... 32
Gambar 2.14 Motor stepper dengan lilitan bipolar……… 32
Gambar 2.15 Motor DC………..……… 34
Gambar 3.5 Rangkaian Minimum System AtMega16………... 42
Gambar 3.6 Flowchart System……….. 43
Gambar 4.1 Pengujian Pada Rangkaian Catu Daya……….. 44
Gambar 4.2 Pengujian Rangkaian Mikrokontoler………..…….. 45
SISTEM PENGENDALI LINEFOLLOWER PENGANGKAT BARANG ABSTRAK
Robot Pengikut Garis merupakan suatu bentuk robot bergerak otomatis yang mempunyai misi mengikuti suatu garis pandu yang telah ditentukan secara otonom. Dalam perancangan dan implementasinya. Dalam proyek ini akan dibahas mengenai robot Line Follower. Robot ini merupakan salah satu bentuk robot beroda yang memiliki komponen utama diantaranya, seperti resistor, dioda, transistor, Led yang dirangkai untuk menghasilkan jenis kendaraan yang berjalan secara otomatis dengan kecepatan tertentu mengikuti garis. Tujuan penelitian ini adalah merancang dan mengimplementasikan suatu Robot Pengikut Garis dengan menggunakan mikrokontroler ATMEGA16 dan sensor infra merah.
Sistem mekanik robot mengadopsi sistem maneuver pada mobil empat roda biasa. Agar robot memiliki kemampuan bermanuver tinggi dan dapat dikontrol relative mudah, sistem kemudi yang digunakan dalam penelitian ini adalah jenis diferensial : Robot memiliki dua roda utama yang digerakan oleh sistem penggerak (motor DC) tersendiri dan satu buah kastor sebagai roda penyeimbang. Hasilnya memperlihatkan bahwa robot mampu menjejak garis hitam pada bidang warna putih (atau sebaliknya: garis putih pada bidang warna hitam). Hasil uji coba rangkaian Line Follower ini menunjukkan performa yang mampu berjalan di beberapa medan, diantaranya medan lurus, belok, naik, dan menurun.
BAB 1 PENDAHULUAN
1.1. Latar Belakang
Dewasa ini perkembangan teknologi sangatlah pesat dan telah
menyentuh seluruh aspek kehidupan terutama dalam bidang industri.
Dalam perkembangannya teknologi ini manusia terus berusaha untuk
memperbaharui atau menciptakan suatu metode ataupun suatu benda yang
diharapkan mampu mempermudah manusia dalam kegiatannya sehari-hari
dalam setiap sector kehidupannya. Dengan kemajuan teknologi pula semua
pekerjaan dalam bidang industri yang membosankan, tidak nyaman, dan
berbahaya untuk manusia dapat dilakukan oleh mesin-mesin yang bekerja
secara otomatis. Hal ini tentunya dapat meningkatkan efektivitas dan
efesiensi dalam dunia industri.
Berbicara tentang industri, belakang ini dunia industry berubah
secara cepat dan maju. Produksi tepat waktu, kualitas tinggi, keamanan
operasi, dan optimasi produksi serta efektivitas dan efesiensi merupakan
kriteria-kriteria yang sangat diperhatikan dalam dunia industri.
Berawal dari pemikiran diatas maka terbayanglah suatu gagasan
untuk membuat sebuah alat pengangkut barang yang dapat bergerak secara
otomatis. Alat angkut otomatis ini diharapkan dapat menggantikan alat
angkut yangsudah ada. Alat ini dapat mengangkut dan memindahkan
menggunakan tenaga manusia untuk mengendalikannya. Sistem ini
berbasis mikrokontroler ATMega 16, komponen ini mudah didapat
dipasaran dan karakteristik komponen tersebut mendukung untuk aplikasi
kerja sistem yang dirancang. Alat angkut ini juga dilengkapi dengan sensor
pendeteksi garis yang dipergunakan untuk dapat membaca garis.
1.2. Rumusan Masalah
Dalam merancang dan membuat “Sistem Pengendali Line
Follower Pengangkat Barang”.Penulis akan membahas dan menganalisa rangkaian tersebut secara blok per blok. Komponen yang di gunakan
dalam perancangan akan di bahas fungsinya secara umum dan
karakteristik tidak di bahas. Perencanaan dan analisa rangkaian, di jelaskan
secara blok perblok. Tidak di bahas bagaimana cara pembuatan program
dan hasil nya hanya sekilas tentang bagaimana program tersebut bekerja.
1.3. Tujuan Penulisan
1. Memanfaatkan modul sensor E18- D80NK sebagai pendeteksi ada atau
tidak barang.
2. Memanfaatkan IC L293 sebagai pengendali dan driver Motor.
3. Memanfaatkan prinsip kerja sensor garis untuk mendeteksi adanya sebuah
1.4. Batasan Masalah
1. Rangkaian Mikrokontroler yang digunakan adalah mikrokontroler
ATMega16
2. Sensor yang digunakan adalah sensor TCRT5000, dan sensor garis
3. Motor yang digunakan adalah motor DC dan motor stepper
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan penulisan laporan ini, penulis membuat
susunan bab – bab yang membentuk laporan ini dalam sistematika penulisan
laporan dengan urutan sebagai berikut :
BAB 1 PENDAHULUAN
Dalam bab ini berisikan mengenai latar belakang, tujuan penulisan, rumusan
masalah, batasan masalah, dan sistematika penulisan.
BAB 2 LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk
pembahasan dan cara kerja dari rangkaian dan bahasa program yang
BAB 3 PERANCANGAN DAN PEMBUATAN
Bab ini berisikan tentang proses perancangan dan pembuatan alat. Mulai dari
perancangan dan pembuatan sistem secara hardware atau software
BAB 4 HASIL DAN PEMBAHASAN
Dalam bab ini akan dibahas hasil analisa dari rangkaian dan sistem kerja alat,
penjelasan mengenai rangkaian-rangkaian yang digunakan, penjelasan mengenai
program yang diisikan ke mikrokontroller ATMega16
BAB 5 PENUTUP
Dalam bab ini menjelaskan kesimpulan dan saran dari alat ataupun data yang
dihasilkan dari alat. Bab ini juga merupakan akhir dari penulisan laporan tugas
BAB 2
LANDASAN TEORI
Line Follower Robot adalah robot yang biasa bergerak mengikuti garis
panduan. Garis pandu yang digunakan dalam hal ini adalah garis putih yang
ditempatkan di atas permukaan berwarna gelap, ataupun sebaliknya, garis hitam
yang ditempatkan pada permukaan berwarna putih (cerah). Terdapatnya garis
bercabang, perempatan, pertigaan atau bahkan tikungan yang tajam. Maka untuk
menjalankan robot tersebut sesuai dengan yang diinginkan, setiap komponen
hanya di bahas sesuai fungsi nya pada masing- masing, tentunya ada beberapa
progam yang harus dikerjakan dengan bantuan beberapa sensor infrared dan photo
diode sebagai sensor garis.
2.1 Pengertian Sensor Secara Umum
Sensor adalah alat untuk mendeteksi/mengukur sesuatu, yang digunakan
untuk mengubah variasi mekanis, magnetis, panas, sinar dan kimia menjadi
tegangan dan arus listrik. Dalam lingkungan sistem pengendali dan robotika,
sensor memberikan kesamaan yang menyerupai mata, pendengaran, hidung, lidah
yang kemudian akan diolah oleh mikrokontroler sebagai otaknya. Sensor dalam
teknik pengukuran dan pengaturan secara elektronik berfungsi mengubah besaran
fisik (misalnya : temperatur, gaya, kecepatan putaran) menjadi besaran listrik
Prinsip kerja dari jenis sensor aktif adalah menghasilkan perubahan
resistansi/tahanan listrik, perubahan tegangan atau juga arus listrik langsung bila
diberikan suatu respon penghalang atau respon penambah pada sensor tersebut
(contoh sinar/cahaya yang menuju sensor dihalangi atau ditambah cahayanya,
panas pada sensor dikurangi atau ditambah dan lain-lainnya).
Variabel keluaran dari sensor yang diubah menjadi besaran listrik disebut
Transduser. Pada saat ini, sensor tersebut telah dibuat dengan ukuran sangat kecil
dengan orde nanometer. Ukuran yang sangat kecil ini sangat memudahkan
pemakaian dan menghemat energi. Berdasarkan perubahan lingkungan yang
dideteksi sensor dapat dikalsifikasikan atas :
- Sensor kimia
Sensor kimia mendeteksi jumlah suatu zat kimia dengan cara mengubah besaran
kimia menjadi besaran listrik. Biasanya melibatkan beberapa reaksi kimia. Contoh
sensor kimia adalah sensor pH, sensor Oksigen, sensor ledakan, dan sensor gas.
- Sensor Fisika
Sensor fisika mendeteksi suatu besaran berdasarkan hukum-hukum fisika. Contoh
sensor fisika adalah sensor cahaya, sensor suara, sensor gaya, sensor tekanan,
sensor getaran/vibrasi, sensor gerakan, sensor kecepatan,sensor percepatan, sensor
gravitasi, sensor suhu, sensor kelembaban udara, sensor medan listrik/magnit, dll.
Secara umum berdasarkan fungsi dan penggunaannya sensor dapat dikelompokan
menjadi 3 bagian yaitu:
• Sensor thermal (panas)
• Sensor mekanis
- Sensor Biologi
Sensor biologi merupakan besaran listrik dimana di dalamnya dilibatkan beberapa
reaksi kimia, seperti misalnya pada sensor pH, sensor oksigen, sensor ledakan,
serta sensor gas. Berdasarkan jenis pengukurannya sensor biologi dapat dibedakan
atas :
• Sensor pengukuran molekul dan biomolekul: toxin, nutrient, pheromone.
• Sensor pengukuran tingkat glukosa, oxigen, dan osmolitas.
• Sensor pengukuran protein dan hormon.
2.2 LED Infra Merah
LED adalah suatu bahan semikonduktor yang memancarkan cahaya
monokromatik yang tidak koheren ketika diberi tegangan maju. Pengembangan
LED dimulai dengan alat inframerah dibuat dengan galliumarsenide. Cahaya infra
merah pada dasarnya adalah radiasi elektromagnetik dari panjang gelombang yang
lebih panjang dari cahaya tampak, tetapi lebih pendek dari radiasi gelombang
radio, dengan kata lain infra merupakan warna dari cahaya tampak dengan
gelombang terpanjang, yaitu sekitar 700 nm sampai 1 mm. Yang dimaksud sensor
garis disini adalah suatu perangkat/alat yang digunakan untuk mendeteksi adanya
sebuah garis atau tidak. Garis yang dimaksud adalah garis berwarna putih diatas
permukaan berwarna hitam. Alat ini menggunakan teknik pantulan cahaya
inframerah yang ditangkap oleh photodiode dari sebuah LED merah. Inframerah
Gambar 2.1 Inframerah
Cahaya LED timbul sebagai akibat penggabungan elektron dan hole pada
persambungan antara dua jenis semikonduktor dimana setiap penggabungan
disertai dengan pelepasan energi. Pada penggunaannya LED infra merah dapat
diaktifkan dengan tegangan DC untuk transmisi atau sensor jarak dekat, dan
dengan teganganAC (30–40 KHz) untuk transmisi atau sensor jarak jauh.
LED Infra Merah merupakan salah satu jenis LED (Light Emiting Diode)
yang dapat memancarkan cahaya infra merah yang tidak kasat mata. Cahaya infra
merah merupakan gelombang cayaha yang berapa pada spectrum cahaya tak kasat
mata. LED infra merah dapat memacarkan cahaya infra merah pada saat diode
LED ini diberikan tegangan bias maju pada anoda dan katodanya.
LED infra merah ini dapat memancarkan gelombang cahaya infra merah
karena dibuat dengan bahan khusus untuk memendarkan cahaya infra merah.
Aplikasi dari LED infra merah ini dapat digunakan sebagai transmitter remote
control maupun sebagai line detektor pada pintu gerbang maupun sebagai sensor
pada robot. Aplikasi cahaya infra merah sendiri dapat digunakan sebagai link pada
jaringan telekomunikasi atau dapat juga dipancarkan pada fiber optic. Sebagai
receiver cahaya infra merah dapat digunakan foto dioda, foto transistor maupun
2.3 Photodioda
Bentuk dari Photodioda sama dengan LED namun fungsinya berbeda.
Photodioda digunakan sebagai sensor cahaya. Photodioda adalah dioda yang
bekerja berdasarkan intensitas cahaya, seperti pada gambar 2.2, jika photodioda
terkena cahaya maka photodioda bekerja seperti dioda pada umumnya, tetapi jika
tidak mendapat cahaya maka photodioda akan berperan seperti resistor dengan
nilai tahanan yang besar sehingga arus listrik tidak dapat mengalir. Gambar
photodioda bisa kita liat pada gambar 2.2 berikut:
Gambar 2.2. Photodioda
Photodioda merupakan sensor cahaya semikonduktor yang dapat
mengubah besaran cahaya menjadi besaran listrik. Photodioda merupakan sebuah
dioda dengan sambungan p-n yang dipengaruhi cahaya dalam kerjanya. Cahaya
yang dapat dideteksi oleh photodioda ini mulai dari cahaya infra merah, cahaya
tampak, sinar-X.
Prinsip kerja, karena photodioda terbuat dari semikonduktor p-n
junction maka cahaya yang diserap oleh photodioda akan mengakibatkan
terjadinya pergeseran foton yang akan menghasilkan pasangan electron-hole
Ketika elektron-elektron yang dihasilkan itu masuk ke pita konduksi maka
elektron-elektron itu akan mengalir ke arah positif sumber tegangan sedangkan
hole yang dihasilkan mengalir ke arah negatif sumber tegangan sehingga arus
akan mengalir di dalam rangkaian. Besarnya pasangan elektron ataupun hole yang
dihasilkan tergantung dari besarnya intensitas cahaya yang diserap oleh
photodioda.
Photodiode dibuat dari semikonduktor dengan bahan yang populer adalah
silicon ( Si) atau galium arsenida ( GaAs), dan yang lain meliputi InSb, InAs,
PbSe. Material ini menyerap cahaya dengan karakteristik panjang gelombang
mencakup: 2500 Å - 11000 Å untuk silicon, 8000 Å – 20,000 Å untuk GaAs.
Ketika sebuah photon (satu satuan energi dalam cahaya) dari sumber cahaya
diserap, hal tersebut membangkitkan suatu elektron dan menghasilkan sepasang
pembawa muatan tunggal, sebuah elektron dan sebuah hole, di mana suatu hole
adalah bagian dari kisi-kisi semikonduktor yang kehilangan elektron.
Arah Arus yang melalui sebuah semikonduktor adalah kebalikan dengan
gerak muatan pembawa. cara tersebut didalam sebuah photodiode digunakan
untuk mengumpulkan photon - menyebabkan pembawa muatan (seperti arus atau
tegangan) mengalir/terbentuk di bagian-bagian elektroda.
Sifat dari Photodioda adalah :
1. Jika terkena cahaya maka resistansi nya berkurang
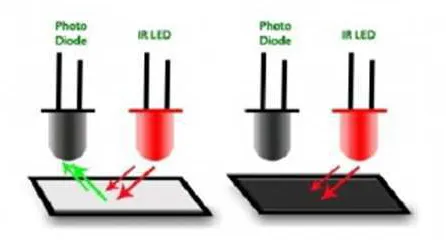
2.4. Sensor Garis
Yang dimaksud sensor garis disini adalah suatu perangkat/alat yang
digunakan untuk mendeteksi adanya sebuah garis atau tidak. Garis yang dimaksud
adalah garis berwarna hitam di atas permukaan berwarna putih. Alat ini
menggunakan teknik pantulan cahaya yang ditangkap oleh photodiode dari sebuah
LED.
Sensor Garis seperti pada gambar 2.3, Hanya dengan bantuan sensor, robot
dapat menentukan arah gerakannya, dalam line follower ini kita menggunakan
jenis sensor inframerah. Pembuatan sensor tersebut cukup mudah, yaitu
menggunakan satu buah komponen photodiode dan satu buah Light Emitting
Diode (LED) inframerah atau sering diganti dengan LED Superbright dengan
warna tertentu yang dipasang secara berdampingan. LED akan memancarkan
cahaya ke permukaan dan pantulan cahaya tersebut akan diterima oleh
photodiode. Ada juga yang menggunakan kamera sebagi sensor (atau image sensor) agar resolusi pembacaan garis lebih tinggi, sehingga menjadikan gerakan
robot lebih akurat.
2.5. Sensor inframerah TCRT5000
Untuk mendeteksi keberadaan garis, alat ini menggunakan modul sensor
inframerah TCRT5000. Modul ini akan beroperasi pada tengangan 5V. Sensor ini
akan menghasilkan logika 1 ketika terkena garis putih, dan akan menghasilkan
logika 0 ketika sensor diletakkan diatas permukaan hitam. Pada alat ini, digunakan
4 buah modul TCRT5000 yang diletakkan di depan dan di belakang robot untuk
menuntun perjalan robot selama beroperasi. Pada gambar 2.4 adalah gambar
modul TCRT5000.
Gambar 2.4 modul TCRT5000
Untuk mendeteksi ada atau tidaknya barang di depan robot, digunakan
sensor jarak yang berbasis pada inframerah juga. Modul yang digunakan adalah
modul sensor E18-D80NK. Modul ini mempunyai lensa untuk memfokuskan
pengiriman dan penerimaan sinyal inframerah, sehingga modul ini dapat
digunakan untuk mendeteksi inframerah sampai pada 80cm. Jangakauan sensor
ini dapat diubah sesuai kebutuhan dengan cara memutar trimmer yang ada pada
barang diahadapan robot. Ketika sensor ini mendeteksi adanya barang di
depannya, sensor akan mengirimkan logika 0 pada mikrokontroler
2.6. LCD (Liquid Crystal Display)
LCD merupakan salah satu perangkat penampil yang sekarang ini mulai
banyak digunakan. Penampil LCD mulai dirasakan menggantikan fungsi dari
penampil CRT (Cathode Ray Tube), yang sudah berpuluh-puluh tahun digunakan
manusia sebagai penampil gambar/text baik monokrom (hitam dan putih),
maupun yang berwarna. Teknologi LCD memberikan keuntungan dibandingkan
dengan teknologi CRT, karena pada dasarnya, CRT adalah tabung triode yang
digunakan sebelum transistor ditemukan. Beberapa keuntungan LCD
dibandingkan dengan CRT adalah konsumsi daya yang relative kecil, lebih ringan,
tampilan yang lebih bagus, dan ketika berlama-lama di depan monitor, monitor
CRT lebih cepat memberikan kejenuhan pada mata dibandingkan dengan LCD.
Display elektronik adalah salah satu komponen elektronika yang berfungsi
sebagai tampilan suatu data, baik karakter, huruf ataupun grafik. LCD (Liquid
Cristal Display) adalah salah satu jenis display elektronik yang dibuat dengan
teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya tetapi
memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau
mentransmisikan cahaya dari back-lit. LCD (Liquid Cristal Display) berfungsi
sebagai penampil data baik dalam bentuk karakter, huruf, angka ataupun grafik.
Material LCD (Liquid Cristal Display) LCD adalah lapisan dari campuran
Ketika elektroda diaktifkan dengan medan listrik (tegangan), molekul organik
yang panjang dan silindris menyesuaikan diri dengan elektroda dari segmen.
Lapisan sandwich memiliki polarizer cahaya vertikal depan dan polarizer cahaya
horisontal belakang yang diikuti dengan lapisan reflektor. Cahaya yang
dipantulkan tidak dapat melewati molekul-molekul yang telah menyesuaikan diri
dan segmen yang diaktifkan terlihat menjadi gelap dan membentuk karakter data
yang ingin ditampilkan. Memori yang digunakan microcontroler internal LCD
adalah :
Gambar 2.5 LCD 2x16
1. DDRAM (Display Data Random Access Memory) merupakan memori
tempat karakter yang akan ditampilkan berada. CGRAM (Character
Generator Random Access Memory) merupakan memori untuk
menggambarkan pola sebuah karakter dimana bentuk dari karakter
dapat diubah-ubah sesuai dengan keinginan.
2. CGROM (Character Generator Read Only Memory) merupakan
memori untuk menggambarkan pola sebuah karakter dimana pola
tersebut merupakan karakter dasar yang sudah ditentukan secara
permanen oleh pabrikan pembuat LCD (Liquid Cristal Display)
memorinya dan tidak dapat merubah karakter dasar yang ada dalam
CGROM.
Register control yang terdapat dalam suatu LCD diantaranya adalah.
1. Register perintah yaitu register yang berisi perintah-perintah dari
mikrokontroler ke panel LCD (Liquid Cristal Display) pada saat proses
penulisan data atau tempat status dari panel LCD (Liquid Cristal
Display) dapat dibaca pada saat pembacaan data.
2. Register data yaitu register untuk menuliskan atau membaca data dari
atau keDDRAM. Penulisan data pada register akan menempatkan data
tersebut keDDRAM sesuai dengan alamat yang telah diatur
sebelumnya.
Pin, kaki atau jalur input dan kontrol dalam suatu LCD (Liquid Cristal Display)
diantaranya adalah :
1. Pin data adalah jalur untuk memberikan data karakter yang ingin
ditampilkan menggunakan LCD (Liquid Cristal Display) dapat
dihubungkan dengan bus data dari rangkaian lain seperti mikrokontroler
dengan lebar data 8 bit.
2. Pin RS (Register Select) berfungsi sebagai indikator atau yang
menentukan jenis data yang masuk, apakah data atau perintah. Logika
low menunjukan yang masuk adalah perintah, sedangkan logika high
3. Pin R/W (Read Write) berfungsi sebagai instruksi pada modul jika low
tulis data, sedangkan high baca data. Pin E (Enable) digunakan untuk
memegang data baik masuk atau keluar.
4. Pin VLCD berfungsi mengatur kecerahan tampilan (kontras) dimana
pin ini dihubungkan dengan trimpot 5 Kohm, jika tidak digunakan
dihubungkan ke ground, sedangkan tegangan catu daya ke LCD sebesar
5 Volt.
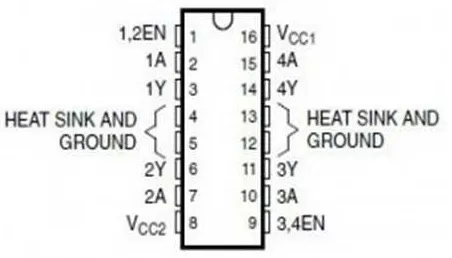
2.7 Driver Motor DC menggunakan IC L293
IC L293D adlah IC yang didesain khusus sebagai driver motor DC dan
dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC
yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke
sumber tegangan positif karena di dalam driver L293D sistem driver yang
digunakan adalah totem pool.
Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang
berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap
drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2
buah motor DC. Konstruksi pin driver motor DC IC l293D adalah seperti gambar
Gambar 2.6 Konstruksi Pin Driver Motor DC IC L293D
1. Fungsi Pin Driver Motor DC IC L293D Pin EN (Enable, EN1.2, EN3.4)
berfungsi untuk mengijinkan driver menerima perintah untuk
menggerakan motor DC.
2. Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC
3. Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing
driver yang dihubungkan ke motor DC
4. Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor
DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol
dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC
yang dikendalikan.
5. Pin GND (Ground) adalah jalur yang harus dihubungkan ke ground, pin
GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah
2.8 Mikrokontroler ATMega 16
Mikrokontroler merupakan sebuah single chip yang didalamnya telah
dilengkapi dengan CPU (Central Processing Unit), RAM (Random Access
Memori), ROM (Read Only Memori), Input dan Output, Timer/Counter, Serial
com port secara spesifik digunakan untuk aplikasi – aplikasi kontrol dan aplikasi
serbaguna.
Perangkat ini sering digunakan untuk kebutuhan kontrol tertentu seperti
pada sebuah penggerak motor. Read Only Memori (ROM) yang isinya tidak
berubah meskipun IC kehilangan catu daya. Memori penyimpanan program
dinamakan sebagai memori program. Random Access Memori (RAM) isinya akan
langsung hilang ketika IC kehilangan catudaya yang dipakai untuk menyimpan
data pada saat program bekerja. RAM yang dipakai untuk menyimpan data ini
disebut sebagai memori data.
Mikrokontroler biasanya dilengkapi dengan UART (Universal
Asychronous Receiver Transmitter) yaitu port serial komunikasi serial asinkron,
USART (Universal Syncrhronous and Asyncrhronous Serial Receiver and
Transmitter) yaitu port yang digunakan untuk komunikasi serial sinkron dan
asinkron yang kecepatannya 16 kali lebih cepat dari UART, SPI (Serial Port
Interface), SCI (Serial Communication Interface),
Bus RC (Intergrated circuit Bus) merupakan 2 jalur yang terdapat 8 bit, CAN
(Control Area Network) merupakan standart pengkabelan SAE (Society of
Automatic Engineers).
Mikrokontroler saat ini sudah dikenal dan digunakan secara luas pada
menggunakan berbagai versi mikrokontroler yang dapat dibeli dengan harga yang
relative murah. Mikrokontroler saat ini merupakan chip utama pada hamper setiap
peralatan elektronika canggih. Mikrokontroler AVR memiliki arsitektur RISC 8
bit, dimana semua instruksi dikemas dalam kode 16 bit (16 bit word) dan sebagian
besar instruksi dieksekusi dalam satu siklus clock, berbeda dengan instruksi CS51
yang membutuhkan siklus 12 clock.
AVR berteknologi RISC (Reduce Instruction Set Computing), sedangkan
seri MCS51berteknologi CISC (Complex Instruction Set Computing). Secara
umum, AVR dikelompokkan menjadi beberapa kelas, yaitu keluarga AT90Sxx,
keluarga ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing –
masing kelas adalah memori, peripheral dan fungsinya. Dari segi arsitektur dan
instruksi yang digunakan, mereka bias dikatakan hampir sama.
2.9 Fitur Mikrocontroler ATmega 16
Fitur-fitur yang dimiliki ATMega 16 sebagai berikut :
1. Microcontroller AVR 8 bit yang memiliki kemampuan tinggi, dengan
daya rendah.
2. Arsitektur RISC dengan throughput mencapai 16 MIPS pada
frekuensi 16MHz.
3. Memiliki kapasitas Flash memori 16 KByte, EEPROM 512 Byte dan
SRAM 1 KByte.
4. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, dan Port
6. Unit interupsi internal dan eksternal.
7. Port USART untuk komunikasi serial.
Fitur Peripheral.
a. Tiga buah Timer/ Counter dengan kemampuan pembandingan.
1. 2(dua) buah Timer/ Counter 8 bit dengan Prescaler terpisah dan Mode
Compare.
2. 1(satu) buah Timer/ Counter 16 bit dengan Prescaler terpisah, Mode
Compare, dan Mode Capture.
b. Real Time Counter dengan Oscillator tersendiri.
c. 4 channel PWM
d. 8 channel, 10 bit ADC.
1. 8 Single-ended Channel.
2. 7 Differential Channel hanya pada kemasan TQFP.
3. 2 Differential Channel dengan Programmable Gain 1x, 10x,
atau 200x.
e. Byte-oriented Two-wire Serial Interface.
f. Programmable Serial USART.
g. Antarmuka SPI.
h. Watchdog Timer dengan oscillator internal.
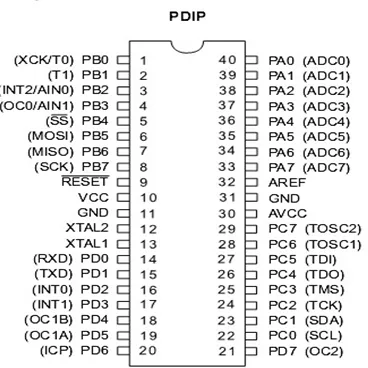
2.10 Konfigurasi PIN ATMega 16
Konfigurasi pin ATMega 16 dengan kemasan 40 pin DIP (Dual Inline
Package) dapat dilihat Dari gambar dibawah ini dapat dijelaskan fungsi dari
masing-masing pin ATMega 16 sebagai berikut :
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya.
2. GND merupakan pin Ground.
3. Port A (PA.0...PA.7) merupakan pin input/ output dua arah dan pin
masukan ADC.
4. Port B (PB.0...PB.7) merupakan pin input/ output dua arah dan pin fungsi
khusus,
5. Port C (PC.0...PC.7) merupakan pin input/ output dua arah dan pin fungsi
Khusus
6. Port D(PD.0...PD.7) merupakan pin input/ output dua arah dan pin fungsi
khusus
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler.
8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
9. AVCC merupakan pin masukan tegangan untuk ADC.
Untuk penjelasan pin dari AVR ATMega 16 ditunjukkan dalam Gambar :
Gambar 2.7 konfigurasi Pin ATMega 16 PDIP
Berikut ini penjelasan mengenai konfigurasi pin ATMega 16 sebagai
berikut
1. Port A (PA7..PA0) Port A berfungsi sebagai input analog pada konverter
A/D. Port A juga sebagai suatu port I/O 8-bit dua arah, jika A/D konverter
tidak digunakan. Pin - pin Port dapat menyediakan resistor internal pull-up
(yang dipilih untuk masing-masing bit). Port A output buffer mempunyai
karakteristik gerakan simetris dengan keduanya sink tinggi dan kemampuan
sumber. Ketika pin PA0 ke PA7 digunakan sebagai input dan secara
eksternal ditarik rendah, pin–pin akan memungkinkan arus sumber jika
resistor internal pull-up diaktifkan. Port A adalah tri-stated manakala suatu
2. Port B (PB7..PB0) Pin B adalah suatu pin I/O 8-bit dua arah dengan resistor
internal pull-up (yang dipilih untuk beberapa bit). Pin B output buffer
mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi dan
kemampuan sumber. Sebagai input, Pin B yang secara eksternal ditarik
rendah akan arus sumber jika resistor pull-up diaktifkan. Pin B adalah
tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
3. Port C (PC7..PC0)Pin C adalah suatu pin I/O 8-bit dua arah dengan resistor
internal pull-up (yang dipilih untuk beberapa bit). Pin C output buffer
mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi dan
kemampuan sumber. Sebagai input, pin C yang secara eksternal ditarik
rendah akan arus sumber jika resistor pull-up diaktifkan. pin C adalah
tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
4. Port D (PD7..PD0) Pin D adalah suatu pin I/O 8-bit dua arah dengan resistor
internal pull-up (yang dipilih untuk beberapa bit). Pin D output buffer
mempunyai karakteristik gerakan simetris dengan keduanya sink tinggi dan
kemampuan sumber. Sebagai input, pin D yang secara eksternal ditarik
rendah akan arus sumber jika resistor pull-up diaktifkan. Pin D adalah
tri-stated manakala suatu kondisi reset menjadi aktif, sekalipun waktu habis.
• RESET (Reset input)
• AVCC adalah pin penyedia tegangan untuk Port A dan Konverter A/D.
• AREF adalah pin referensi analog untuk konverter A/D.
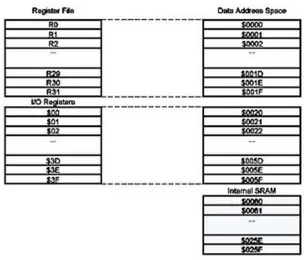
2.11 Peta Memori ATMega 16
ATMega 16 memiliki dua jenis memori yaitu Data Memori dan Program
Memori ditambah satu fitur tambahan yaitu EEPROM Memori untuk penyimpan
data.
1. Memori Program
Arsitektur ATMega16 mempunyai dua memori utama, yaitu memori data
dan memori program. Selain itu, ATMega16 memiliki memori EEPROM untuk
menyimpan data. ATMega16 memiliki 16K byte On-chip In-System
Reprogrammable Flash Memory untuk menyimpan program.
Instruksi ATMega16 semuanya memiliki format 16 atau 32 bit, maka
memori flash diatur dalam 8K x 16 bit. Memori flash dibagi kedalam dua bagian,
yaitu bagian program boot dan aplikasi. Bootloader adalah program kecil yang
bekerja pada saat sistem dimulai yang dapat memasukkan seluruh program
aplikasi ke dalam memori prosesor.
2. Memori Data (SRAM)
Memori data AVR ATMega16 terbagi menjadi 3 bagian, yaitu 32 register
umum, 64 buah register I/O dan 1 Kbyte SRAM internal. General purpose
register menempati alamat data terbawah, yaitu $00 sampai $1F. Sedangkan
memori I/O menempati 64 alamat berikutnya mulai dari $20 hingga $5F. Memori
berbagai fitur mikrokontroler seperti kontrol register, timer/counter, fungsi-fungsi
I/O, dan sebagainya. 1024 alamat berikutnya mulai dari $60 hingga $45F
digunakan untuk SRAM internal.
Gambar 2.8 peta memori ATMega 16
3. Memori Data EEPROM
ATMega16 terdiri dari 512 byte memori data EEPROM 8 bit, data dapat
ditulis/dibaca dari memori ini, ketika catu daya dimatikan, data terakhir yang
ditulis pada memori EEPROM masih tersimpan pada memori ini, atau dengan
kata lain memori EEPROM bersifat nonvolatile. Alamat EEPROM mulai dari
4. Analog To Digital Converter
AVR ATMega16 merupakan tipe AVR yang telah dilengkapi dengan 8
saluran ADC internal dengan resolusi 10 bit. Dalam mode operasinya, ADC
dapat dikonfigurasi, baik single ended input maupun differential input. Selain itu,
ADC ATMega16 memiliki konfigurasi pewaktuan, tegangan referensi, mode
operasi, dan kemampuan filter derau (noise) yang amat fleksibel sehingga dapat
dengan mudah disesuaikan dengan kebutuhan dari ADC itu sendiri. ADC pada
ATMega16 memiliki fitur-fitur antara lain :
1. AREF adalah pin referensi analog untuk konverter A/D.
2. Resolusi mencapai 10-bit
3. Akurasi mencapai ± 2 LSB
4. Waktu konversi 13-260µs
5. 8 saluran ADC dapat digunakan secara bergantian
6. Jangkauan tegangan input ADC bernilai dari 0 hingga VCC
7. Disediakan 2,56V tegangan referensi internal ADC
8. Mode konversi kontinyu atau mode konversi tunggal
9. Interupsi ADC complete
2.12 Motor Stepper
Motor stepper adalah salah satu jenis motor dc yang dikendalikan dengan
pulsa-pulsa digital. Prinsip kerja motor stepper adalah bekerja dengan mengubah pulsa-pulsa
elektronis menjadi gerakan mekanis diskrit dimana motor stepper bergerak
berdasarkan urutan pulsa yang diberikan kepada motor stepper tersebut.
2.12.1 Kelebihan Motor Stepper
Kelebihan motor stepper dibandingkan dengan motor DC biasa adalah :
1. Sudut rotasi motor proporsional dengan pulsa masukan sehingga lebih
mudah diatur.
2. Motor dapat langsung memberikan torsi penuh pada saat mulai bergerak
3. Posisi dan pergerakan repetisinya dapat ditentukan secara presisi
4. Memiliki respon yang sangat baik terhadap mulai, stop dan berbalik
(perputaran)
5. Sangat realibel karena tidak adanya sikat yang bersentuhan dengan rotor
seperti pada motor DC
6. Dapat menghasilkan perputaran yang lambat sehingga beban dapat dikopel
langsung ke porosnya
7. Frekuensi perputaran dapat ditentukan secara bebas dan mudah pada range
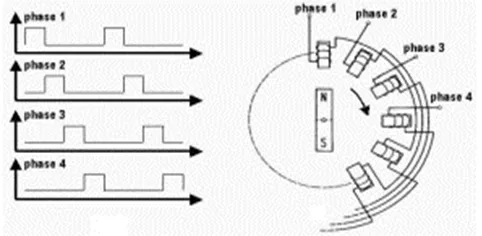
2.12.2 Prinsip Kerja Motor Stepper
Prinsip kerja motor stepper adalah mengubah pulsa-pulsa input menjadi gerakan
mekanis diskrit. Oleh karena itu untuk menggerakkan motor stepper diperlukan
pengendali motor stepper yang membangkitkan pulsa-pulsa periodik.
Berikut pada gambar 2.9 ini adalah ilustrasi struktur motor stepper sederhana dan
pulsa yang dibutuhkan untuk menggerakkannya.
Gambar 2.9Prinsip Kerja Motor Stepper
Pada gambar 2.9 diatas memberikan ilustrasi dari pulsa keluaran pengendali motor
stepper dan penerpan pulsa tersebut pada motor stepper untuk menghasilkan arah
putaran yang bersesuaian dengan pulsa kendali.
2.12.3 Jenis-Jenis Motor Stepper
Berdasarkan struktur rotor dan stator pada motor stepper, maka motor stepper
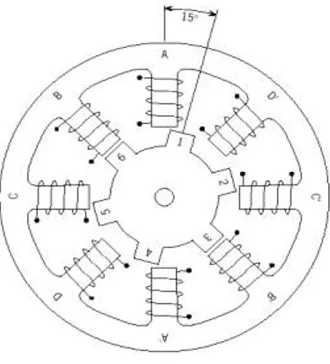
2.12.4 Motor stepper Variable reluctance (VR)
Motor stepper jenis ini telah lama ada dan merupakan jenis motor yang secara
struktural paling mudah untuk dipahami. Motor ini terdiri atas sebuah rotor besi
lunak dengan beberapa gerigi dan sebuah lilitan stator. Ketika lilitan stator diberi
energi dengan arus DC, kutub-kutubnya menjadi termagnetasi. Perputaran terjadi
ketika gigi-gigi rotor tertarik oleh kutub-kutub stator. Berikut pada gambar 2.10
ini adalah penampang melintang dari motor stepper tipe variable reluctance (VR)
Gambar 2.10 Motor stepper tipe variable reluctance (VR)
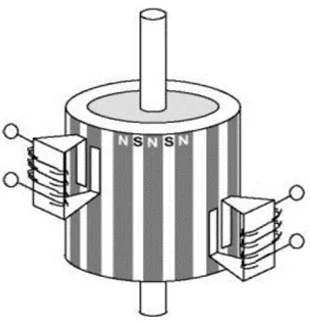
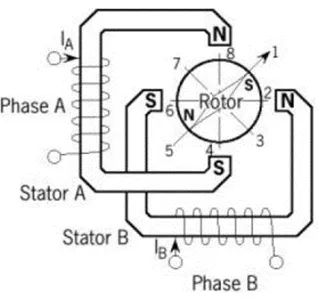
2.12.5 Motor stepper Permanent Magnet (PM)
Motor stepper jenis ini memiliki rotor yang berbentuk seperti kaleng bundar (tin
can) yang terdiri atas lapisan magnet permanen yang diselang-seling dengan kutub
yang berlawanan. Dengan adanya magnet permanen, maka intensitas fluks magnet
antara 7,50 hingga 150 per langkah atau 48 hingga 24 langkah setiap putarannya.
Berikut pada gambar 2.11 ini adalah ilustrasi sederhana dari motor stepper tipe
permanent magnet :
Gambar 2.11 Motor stepper tipe permanent magnet (PM)
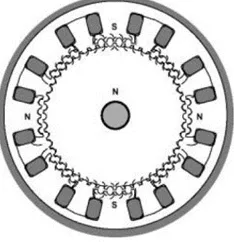
2.12.6 Motor stepper Hybrid (HB)
Motor stepper tipe hibrid memiliki struktur yang merupakan kombinasi dari kedua
tipe motor stepper sebelumnya. Motor stepper tipe hibrid memiliki gigi-gigi
seperti pada motor tipe VR dan juga memiliki magnet permanen yang tersusun
secara aksial pada batang porosnya seperti motor tipe PM. Motor tipe ini paling
banyak digunkan dalam berbagai aplikasi karena kinerja lebih baik. Motor tipe
hibrid dapat menghasilkan resolusi langkah yang tinggi yaitu antara 3,60 hingga
0,90 per langkah atau 100-400 langkah setiap putarannya. Berikut pada gambar
Gambar 2.12 Motor stepper tipe hibrid
Berdasarkan metode perancangan rangkain pengendalinya, motor stepper dapat
dibagi menjadi 2 jenis yaitu motor stepper unipolar dan motor stepper bipolar.
2.12.7 Motor Stepper Unipolar
Rangkaian pengendali motor stepper unipolar lebih mudah dirancang karena
hanya memerlukan satu switch / transistor setiap lilitannya. Untuk menjalankan
dan menghentikan motor ini cukup dengan menerapkan pulsa digital yang hanya
terdiri atas tegangan positif dan nol (ground) pada salah satu terminal lilitan
(wound) motor sementara terminal lainnya dicatu dengan tegangan positif konstan
(VM) pada bagian tengah (center tap) dari lilitan seperti pada gambar 2.13
Gambar 2.13 Motor stepper dengan lilitan unipolar
2.12.8 Motor Stepper Bipolar
Untuk motor stepper dengan lilitan bipolar, diperlukan sinyal pulsa yang
berubah-ubah dari positif ke negatif dan sebaliknya. Jadi pada setiap terminal lilitan (A &
B) harus dihubungkan dengan sinyal yang mengayun dari positif ke negatif dan
sebaliknya. Karena itu dibutuhkan rangkaian pengendali yang agak lebih
kompleks daripada rangkaian pengendali untuk motor unipolar. Motor stepper
bipolar memiliki keunggulan dibandingkan dengan motor stepper unipolar dalam
hal torsi yang lebih besar untuk ukuran yang sama.
2.13 Motor DC
Motor DC adalah motor listrik yang memerlukan suplai tegangan arus
searah pada kumparan medan untuk diubah menjadi energi gerak mekanik.
Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan
kumparan jangkar disebut rotor (bagian yang berputar). Motor arus searah,
sebagaimana namanya, menggunakan arus langsung yang tidak
langsung/direct-unidirectional.
Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa
berputar bebas di antara kutub-kutub magnet permanen. Catu tegangan dc dari
baterai menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen
yang terhubung dengan dua ujung lilitan.
Motor DC memiliki 3 bagian atau komponen utama untuk dapat berputar
sebagai berikut.
1. Bagian Atau Komponen Utama Motor DC Kutub medan. Motor DC
sederhana memiliki dua kutub medan: kutub utara dan kutub selatan.
Garis magnetik energi membesar melintasi ruang terbuka diantara
kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau
lebih komplek terdapat satu atau lebih elektromagnet.
2. Current Elektromagnet atau Dinamo. Dinamo yang berbentuk silinder,
dihubungkan ke as penggerak untuk menggerakan beban. Untuk kasus
motor DC yang kecil, dinamo berputar dalam medan magnet yang
3. Commutator. Komponen ini terutama ditemukan dalam motor DC.
Kegunaannya adalah untuk transmisi arus antara dinamo dan sumber
daya.
Gambar 2.15. Motor DC
Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak
mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan
mengatur:
1. Tegangan dinamo : meningkatkan tegangan dinamo akan meningkatkan
kecepatan Arus
2. Medan : Menurunkan arus medan akan meningkatkan kecepatan.
Pada motor dc, daerah kumparan medan yang dialiri arus listrik akan
menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah
tertentu. Konversi dari energi listrik menjadi energi mekanik (motor) maupun
sebaliknya berlangsung melalui medan magnet, dengan demikian medan magnet
tempat berlangsungnya proses perubahan energi, daerah tersebut dapat dilihat pada
gambar di bawah ini :
Gambar 2.16 Prinsip Kerja Motor DC
Agar proses perubahan energi mekanik dapat berlangsung secara sempurna, maka
tegangan sumber harus lebih besar daripada tegangan gerak yang disebabkan
reaksi lawan. Dengan memberi arus pada kumparan jangkar yang dilindungi oleh
medan maka menimbulkan perputaran pada motor.
2.14 Bahasa Pemograman BASCOM-AVR
Bahasa BASCOM-AVR menggunakan bahasa pemograman BASIC.
Bahasa BASIC adalah bahasa pemograman yang dapat dikatakan bahasa
pemograman berlevel tinggi. Bahasa pemograman berlevel rendah berarti bahasa
pemograman yang berorientasi pada mesin, misalnya bahasa assembly.
Sedangkan bahasa pemograman berlevel tinggi merupakan bahasa pemograman
Bahasa pemograman berlevel rendah merupakan bahasa pemograman
dengan sandi yang hanya dimengerti oleh mesin, sehingga untuk memprogram
dalam bahasa ini diperlukan tingkat kecermatan yang tinggi. Bahasa pemograman
berlevel tinggi relatif mudah digunakan, karena ditulis dengan bahasa manusia
yang lebih mudah dimengerti dan tidak tergantung pada mesin.
Penulisan program dalam bahasa BASCOM-AVR ini tidak mengenal
aturan penulisan dikolam tertentu. Jadi bisa dimulai dari kolom manapun. Namun
demikian, untuk mempermudah dalam pembacaan program dan untuk keperluan
dokumentasi, sebaiknya penulisan program dalam bahasa BASCOM-AVR ini
diatur sedemikian rupa sehingga mudah dibaca. Bascom Avr sendiri adalah salah
satu tool untuk pengembangan / pembuatan program untuk kemudian ditanamkan
dan dijalankan pada mikrokontroler terutama mikrokontroler keluarga AVR .
BASCOM AVR juga bisa disebut sebagai IDE (Integrated Development
Environment) yaitu lingkungan kerja yang terintegrasi, karena disamping tugas
utamanya meng-compile kode program menjadi file hex / bahasa mesin, Bascom
Avr juga memiliki kemampuan / fitur lain yang berguna sekali seperti monitoring
komunikasi serial dan untuk menanamkan program yang sudah di compile ke
mikrokontroler.
Bascom Avr menyediakan pilihan yang dapat mensimulasikan program.
Program simulasi ini bertujuan untuk menguji suatu aplikasi yang dibuat dengan
pergerakan LED yang ada pada layar simulasi dan dapat juga langsung dilihat
pada LCD, jika kita membuat aplikasi yang berhubungan dengan LCD. Intruksi
yang dapat digunakan pada editor BASCOM AVR relatif cukup banyak dan
Inisialisasi pin atau mengaktifkan pin adalah berfungsi untuk
mengendalikan keseluruhan sistem dari alat. Perangkat ini berisikan program yang
nantinya disimpan di dalam mikrokontroler Atmega16, sehingga mikrokontroler
melaksanakan perintah-perintahnya secara otomatis sesuai dengan urutan program
yang dibuat.
Pengarah preprosesor $regfile = “m16def.dat” merupakan pengarah
pengarah preprosesor bahasa BASIC yang memerintahkan untuk meyisipkan file
lain, dalam hal ini adalah file m16def.dat yang berisi deklarasi register dari
mikrokonroller ATmega 16.
Konstanta merupakan suatu nilai dengan tipe data tertentu yang tidak
dapat diubah-ubah selama proses program berlangsung. Konstanta harus
didefinisikan terlebih dahulu diawal program. Contoh : Kp = 35, Ki=15, Kd=40
Variabel adalah suatu pengenal (identifier) yang digunakan untuk mewakili suatu
nilai tertentu di dalam proses program yang dapat diubah-ubah sesuai dengan
kebutuhan. Nama dari variable terserah sesuai dengan yang diinginkan namun hal
yang terpenting adalah setiap variabel diharuskan :
1. Terdiri dari gabungan huruf dan angka dengan karakter pertama harus
berupa huruf, max 32 karakter.
2. Tidak boleh mengandung spasi atau symbol-simbol khusus seperti : $, ?,
%, #, !, &, *, (, ), -, +, = dan lain sebagainya kecuali underscore.
Deklarasi sangat diperlukan bila akan menggunakan pengenal (identifier) dalam
BAB 3 PERANCANGAN DAN PEMBUATAN
3.1 Diagram Blok Sistem
Gambar 3.1 Diagram blok Sistem
Motor dc diletakkan disisi kiri dan kanan untuk menggerakkan robot maka robot
akan bergerak sesuai dengan warna yang dideteksi oleh sensor garis, jika
sehingga robot akan mengangkat barang yang sudah di deteksi oleh sensor barang
dan perintah perintah itu akan diproses di microcontroller dan akan ditampilkan
pada LCD.
3.2 Rangkaian Sensor Inframerah Sensor Garis dan Sensor Barang
Untuk mendeteksi keberadaan garis, alat ini menggunakan modul sensor
inframerah TCRT5000. Modul ini akan beroperasi pada tengangan 5V. Sensor ini
akan menghasilkan logika 1 ketika terkena garis putih, dan akan menghasilkan
logika 0 ketika sensor diletakkan diatas permukaan hitam. Pada alat ini, digunakan
4 buah modul TCRT5000 yang diletakkan di depan dan di belakang robot untuk
menuntun perjalan robot selama beroperasi. Berikut pada gambar 3.2 merupakan
gambar bentuk modul TCRT5000.
Gambar 3.2 bentuk modul TCRT5000.
Untuk mendeteksi ada atau tidaknya barang di depan robot, digunakan sensor
dan penerimaan sinyal inframerah, sehingga modul ini dapat digunakan untuk
mendeteksi inframerah sampai pada 80cm. Jangakauan sensor ini dapat diubah
sesuai kebutuhan dengan cara memutar trimmer yang ada pada belakang sensor
ini. Sensor barang digunakan untuk mendeteksi ada tidaknya barang diahadapan
robot. Ketika sensor ini mendeteksi adanya barang di depannya, sensor akan
mengirimkan logika 0 pada mikrokontroler. Dan akan mengirimkan logika 1
ketika tidak ada barang di depan robot. Berikut pada gambar 3.3 merupakan
bentuk modul sensor ini.
Gambar 3.3 modul E18-D80NK
perangkat pyroelectric yang mendeteksi suatu gerakan (motion) dengan mengukur
perubahan tingkat inframerah (panas) yang dipancarkan oleh benda-benda di
sekitarnya. Gerakan ini dapat di deteksi dengan memeriksa perubahan tiba-tiba
pada pola Infrared disekitanya. Ketika suatu gerakan terdeteksi, keluaran/output
sensor PIR bernilai tinggi, logika inilah yang dapat dibaca oleh mikrokontroler
atau digunakan untuk menghidupkan transistor supaya dapat menyalurkan arus
3.3 Rangkaian LCD Karakter 16x2
Berikut ini pada gambar 3.4 merupakan rangkaian yang digunakan untuk
mengoperasikan LCD karakter 16x2.
Gambar 3.4 rangkaian LCD karakter 16
Pada rangkaian ini digunakan trimpot yang dihubungkan pada pin 3 dari LCD.
Hal ini bertujuan agar kontras pada karakter yang ditampilkan pada LCD dapat
diatur tingkat kecerahannya. Pin 5 pada LCD dihubungkan langsung pada GND
shingga logika pada pin ini selalu low. Hal ini akan menyebabkan LCD akan
selalu pada mode Write, dimana LCD sifatnya akan selalu untuk menampilkan
data dari mikrokontroler saja.
Adapun rangkaian minimum system ATMega16 yg digunakan pada alat ini
sebagai berikut
Gambar 3.5 rangkaian minimum system ATMega16
Rangkaian ini merupakan rangkaian minimum ATMega16 dengan kristal 16MHz.
Dengan rangkaian ini mikrokontroler akan bekerja pada frekuensi kerja 16MHz.
Rangkaian minimum ini adalah rangkaian dengan konfigurasi minimum yang
digunakan agar mikrokontroler dapat beroperasi. Pin Reset pada mikrokontroler
terhubung ke 5V melalui sebuah resistor 10K. Pin AVCC, VCC dan ARef pada
BAB 4
HASIL DAN PEMBAHASAN
4.1 Pengujian Rangkaian Catu Daya
Gambar 4.1 Pengujian Pada Rangkaian Catu Daya
Sumber tegangan dalam rangkaian catu daya ini adalah baterai 9V. Untuk
mengujinya dilakukan pengukuran tegangan pada TP1 dan TP2. Pada TP1 tegangan
yang dihasilkan seharusnya berada pada 8,3V – 9V, jika tegangan yang diukur berada
dibawah tegangan tersebut, maka kemungkinan ada kerusakan yang terjadi. Setelah
itu, dilakukan pengukuran tegangan pada TP2. Pada TP2, tegangan harus berkisar
diantara 4,5V – 5V. Jika sudah berada pada rentang tersebut, maka rangkaian ini
4.2 Pengujian Rangkaian Mikrokontroler
Gambar 4.2 Pengujian Rangkaian Mikrokontroler
Untuk memastikan rangkaian mikrokontroler dalam keadaan baik, maka
dilakukan pengujian rangkaian. Pengujian dilakukan dengan cara merangkai
rangkaian seperti terlihat pada gambar dan kemudian menginputkan program pada
mikrokontroler tersebut. Berikut merupakan program sederhana yang diinputkan
untuk menguji rangkaian ini:
$regfile = "m16def.dat"
$crystal = 12000000
Do
Toggle portd.7
Kesimpulan pada perogram diatas adalah, $regfile = “m16def.dat” merupakan
pengarah pengarah prosesor bahasa BASIC yang memerintahkan untuk meyisipkan
file lain, dalam hal ini adalah file m16def.dat yang berisi deklarasi register dari
mikrokonroller ATmega 16, pengarah prosesor lainnya yang sering digunakan ialah
sebagai berikut:
$crystal = 12000000 ‘menggunakan crystal clock 12 MHz. Do sebagai
perulangan pada perogram, dan Ketika program tersebut berjalan, maka LED yang
terhubung pada mikrokontroler akan tampak berkedip dengan jeda waktu tertentu.
Jika sudah dalam keadaan demikian, maka dapat dikatakan rangkaian tersebut sudah
beroperasi dengan baik.
4.3 Pengujian Rangkaian LCD
Rangkaian LCD diuji dengan cara menghubungkannya dengan mikrokontroler seperti
pada gambar diatas. Kemudian pada mikrokontroler diinputkan program sebagai
berikut:
$regfile = "m16def.dat"
$crystal = 12000000
Config Lcdpin = Pin , Db4 = Portb.0 , Db5 = Portd.7 , Db6 = Portd.6 , Db7 = Portd.5 ,
Rs = Portb.2 , E = Portb.1
Config Lcd = 16 * 2
Cursor Off
Cls
Do
Lcd "Test "
Loop
Kesimpulan pada perogram diatas adalah, $regfile = “m16def.dat”
merupakan pengarah pengarah prosesor bahasa BASIC yang memerintahkan untuk
meyisipkan file lain, dalam hal ini adalah file m16def.dat yang berisi deklarasi
register dari mikrokonroller ATmega 16, pengarah prosesor lainnya yang sering
$crystal = 12000000 ‘menggunakan crystal clock 12 MHz. Do sebagai
Config Lcdpin = Pin , Db4 = Portb.0 , Db5 = Portd.7 , Db6 = Portd.6 , Db7 = Portd.5 ,
Rs = Portb.2 , E = Portb.1, adalah program configurasi pada LCD kemudian
aktifkan/test LCD, maka muncullah di tampilan LCD posisi benar .
4.4 Pengujian Rangkaian L293D
Untuk menguji rangkaian L293D, dilakukan dengan cara memberikan logika 0 dan
pada pin-pin input dari ic ini. Berikut ini merupakan table kebenaran dari percobaan
yang dilakukan
Tabel 4.1 Hasil Pengujian Rangkaian L293D
Pin L293D
Kondisi Motor Enable 1 Input 1 Input 2
0 0 0 Diam
1 0 0 Diam
0 1 0 Diam
0 0 1 Diam
1 1 1 Diam
1 1 0 Putar Kanan
Enable 2 Input 1 Input 2
0 0 0 Diam
1 0 0 Diam
0 1 0 Diam
0 0 1 Diam
1 1 1 Diam
1 1 0 Putar Kanan
1 0 1 Putar Kiri
Beradasarkan data tersebut, untuk menggerakan motor maka keadaan pin enable harus
berada dalam keadaan logika high, dan input 1 dan input 2 ic tersebut memiliki logika
yang berbeda.
Dari table diatas inputan yang digunakan 2, yang dimana enable untuk
mengaktipkan perintah dan inputan 1 untuk mengarahkan motor kekiri dan inputan 2
untuk mengarahkan motor kekanan, maka dari hasil analisa dapat disimpulkan bahwa
keadaan pin enable harus berada dalam keadaan logika high, dan input 1 dan input 2
ic tersebut harus memiliki logika yang berbeda agar motor dapat bergerak sesuai arah
BAB V PENUTUP
5.1 Kesimpulan
1. Dari hasil pengujian terlihat bahwa robot pengikut garis yang dibuat telah
mampu mengikuti garis yang ditentukan. dengan menggunakan
mikrokontroler sebagai alat pengatur gerak dari motor untuk mengambil
dan memindahkan objek benda dengan menggunakan baterai sebagai
sumber tegangan sehingga dapat berjalan secara otomatis.
2. Untuk menggerakan motor maka keadaan pin enable pada L293D harus
berada dalam keadaan logika high, dan input 1 dan input 2 ic tersebut
memiliki logika yang berbeda, atau keadaan pin enable harus berada dalam
keadaan logika high, dan input 1 dan input 2 ic tersebut harus memiliki
logika yang berada agar motor dapat bergerak sesuai arah inputan yang
berlogika high.
5.2Saran
1. Robot tidak mampu mengikuti garis dengan tikungan yang tajam,
dikarenakan dari bentuk mekanisme robot yang kurang sempurna, juga
karena kesensitifan sensor masih kurang, maka sebaiknya dibuat
mekanisme yang fleksibel terhadap tikungan yang tajam, juga dengan
menambahkan sensor sehingga akan lebih sensitif
2. Untuk pembuatan alat selanjutnya robot line flower dapat mengangkat
barang ke beberapa ruangan sesuai data yang diinputkan oleh user
DAFTAR PUSTAKA
Eko Putra, Agfianto. 2002. Teknik Antarmuka Komputer Konsep dan Aplikasi.
Yogyakarta: Graha Ilmu
Setiawan, Afrie. 2011. 20 Aplikasi Mikrokontroller ATMega8535 dan ATMega16
Menggunakan BASCOM-AVR. Yogyakarta: Andi
Wahyudi, Didin. 2007. Belajar Mudah Mikrokontroler Robotika. Yogyakarta:
Penerbit ANDI.
Diakses pada tanggal : 29 April 2015
https://pccontrol.wordpress.com/2011/06/27/pengetahuan-dasar-pemrograman-rtc-ds1307-dengan-bahasa-c-codevision-untuk-avr/
Diakses pada tanggal : 29 April 2015
https://akhdanazizan.com/tombol-tekan-push-button
Diakses pada tanggal : 29 April 2015
https://www.alldatasheet,com
Diakses pada tanggal : 29 April 2015
http://zonaelektro.net/motor-stepper/
Diakses pada tanggal : 9 Mei 2015
http://elektronika-dasar.web.id/teori-elektronika/teori-motor-dc-dan-jenis-jenis-Diakses pada tanggal : 9 Mei 2015
http://teorick.blogspot.com/2012/10/prinsip-kerja-motor-dc.html#sthash.aGQ4xHmG.dpuf
Diakses pada tanggal : 9 Mei 2015
http://suyatmansmp7.blogspot.com/2013/02/robot-line-follower.html
Diakses pada tanggal : 9 Mei 2015
https://fahmizaleeits.wordpress.com/2010/09/02/robot-line-follower-dengan-multiplekser-adc/