BAB III
HASIL DAN PEMBAHASAN
3.1 Respon Level pada Start upPada praktikum ini, variabel yang diatur adalah level cairan dalam tangki. Untuk kasus start up, dilakukan 6 kali percobaan dengan variasi mode controller;
proportional (gain 10), proportional (gain 20), proportional integral (gain 20; reset 0.1), proportional integral (gain 20; reset 0.2), proportional integral derivative (gain 20; reset 0.2; rate 0.1), dan proportional integral derivative (gain 20; reset 0.2; rate 0.4). Respon level yang diperoleh dari percobaan dapat dilihat pada gambar di bawah ini.
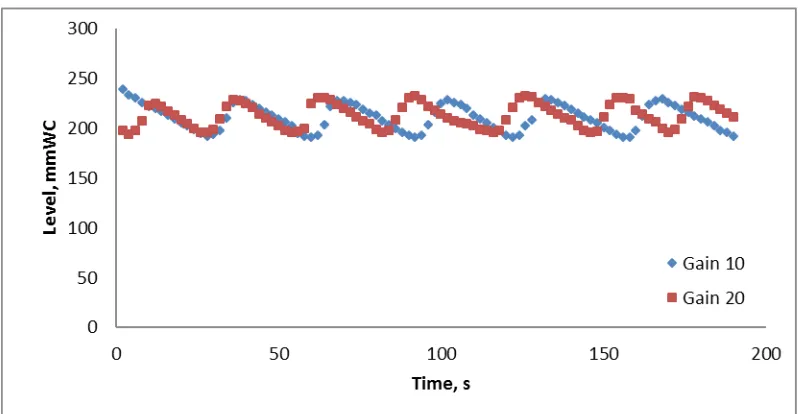
Gambar 3.1 Respon P-controller Terhadap Level Pada Start up dengan Gain 10 dan Gain 20
Dari Gambar 3.1 dapat dilihat bahwa perbedaan gain (Kc) pada proposional controller kasus start up menunjukkan respon yang berbeda. Pada
gain 10 waktu yang dibutuhkan untuk mencapai setpoint adalah 45 sekon dan mengalami 3 kali osilasi. Pada gain 20 waktu yang dibutuhkan untuk mencapai
setpoint adalah 45 sekon dan mengalami 2 kali osilasi. Pada gain 10 terjadi offset
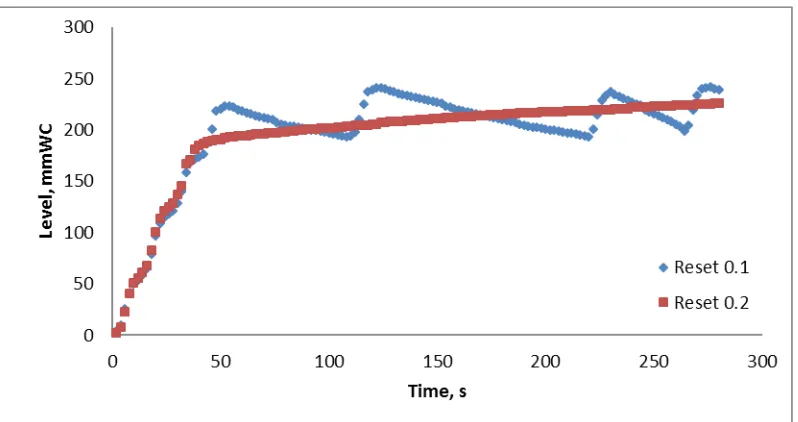
Dinamika level terhadap waktu dengan menggunakan proportional integral controller dapat dilihat pada Gambar 3.2.
Gambar 3.2 Respon PI-controller Terhadap Level Pada Start up dengan Gain 20,
Reset 0.1 dan Gain 20, Reset 0.2
Penambahan fungsi aksi integral pada pengendali proposional bertujuan untuk menghilangkan offset. Dari Gambar 3.2 dapat dilihat bahwa perbedaan reset
(τi) pada proposional integral (PI-controller) kasus start up menunjukkan respon
yang berbeda. Pada gain 20, reset 0.1 waktu yang dibutuhkan untuk mencapai nilai setpoint adalah 46 sekon dan mengalami 3 kali osilasi. Pada gain 20, reset
0.2 waktu yang dibutuhkan untuk mencapai setpoint adalah 86 sekon. Pada gain
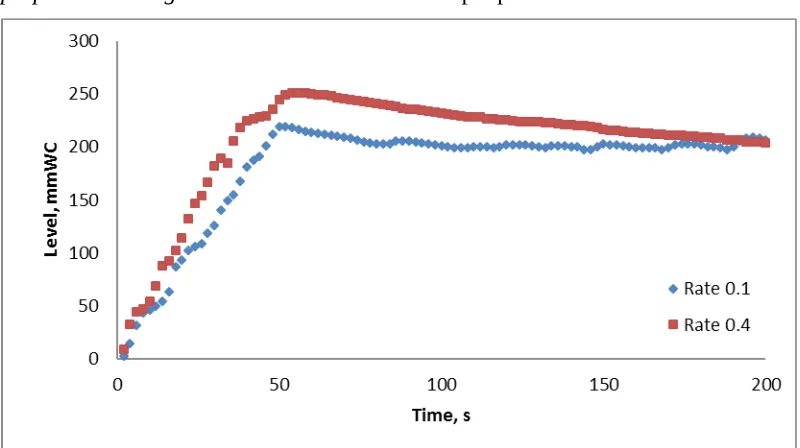
Sedangkan dinamika level terhadap waktu dengan menggunakan
proportional integral derivative controller terdapat pada Gambar 3.3.
Gambar 3.3 Respon PID-controller Terhadap Level Pada Start up dengan Gain
20, Reset 0.2, Rate 0.1 dan Gain 20, Reset 0.2, Rate 0.4
Dari Gambar 3.3 dapat dilihat bahwa perbedaan rate (τd)pada proposional
integral derivatif controller kasus start up menunjukkan respon yang berbeda. Pada gain 20, reset 0.2, rate 0.1 waktu yang dibutuhkan untuk mencapai setpoint
adalah 46 sekon dan mengalami osilasi hanya disekitar setpoint. Pada gain 20,
reset 0.2, rate 0.4 waktu yang dibutuhkan untuk mencapai setpoint adalah 35 sekon dan tidak mengalami. Dari gambar dapat dilihat bahwa pada gain 20, reset
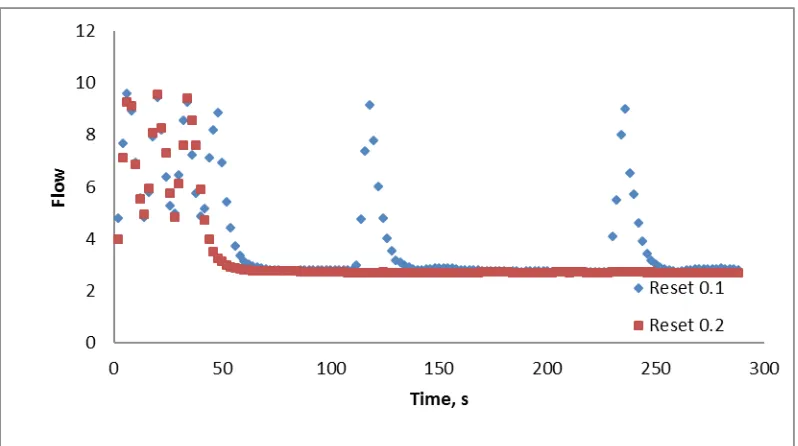
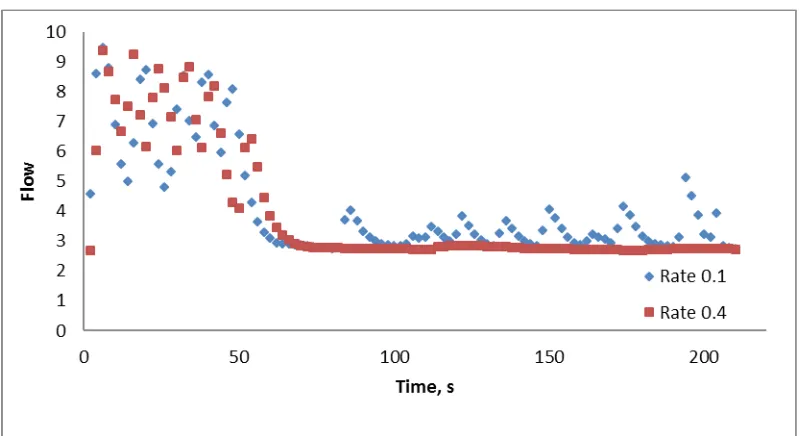
Sedangkan dinamika flow ditunjukkan pada Gambar 3.4, 3.5, dan 3.6.
Gambar 3.4 Respon P-controller Terhadap Flow Pada Start up dengan Gain 10 dan Gain 20
Gambar 3.6 Respon PID-controller Terhadap Flow Pada Start up dengan Gain
20, Reset 0.2, Rate 0.1 dan Gain 20, Reset 0.2, Rate 0.4
Penggunaan kontroler tipe P dapat dilihat pada Gambar 3.4. P controller cenderung meninggalkan offset. Offset dapat dihilangkan dengan meningkatkan
gain proportional. Dengan adanya penambahan tipe integral maka osilasi yang terjadi berkurang, hal ini dapat dilihat pada Gambar 3.5. Pada Gambar 3.5 terlihat osilasi yang terjadi lebih sedikit daripada Gambar 3.4. Tipe PI dengan reset yang lebih besar cenderung lebih stabil. Pada Gambar 3.5 terlihat offset kurva berkurang daripada Gambar 3.6. Tipe PID memiliki sifat stabil, tidak terpengaruh
offset dan responsif.
3.2 Respon Level, Pressure, dan Flow pada Servo
Gambar 3.7 Respon Pengendali Proposional (P-controller) Terhadap Level Pada
Servo dengan Gain 10 dan Gain 20
Kasus servo ini merupakan lanjutan dari kasus start up proses, yaitu dengan memasukkan harga setpoint yang baru. Setpoint yang digunakan adalah dari 200 diubah menjadi 300. Perubahan yang terjadi yaitu respon controller
untuk mencapai set point yang mengalami perubahan. Dari Gambar 3.7 dapat dilihat pada saat gain 10 respon untuk berubah ke set point yang baru lebih cepat 2 sekon yaitu 20 s dibandingkan pada saat gain 20 sebesar 22 s.
Penambahan fungsi aksi integral pada pengendali proposional bertujuan untuk menghilangkan offset. Dari Gambar 3.8 dapat dilihat bahwa perbedaan reset
(τi) pada proposional integral (PI-controller) kasus servo menunjukkan respon
yang berbeda. Dari Gambar 3.8 dapat dilihat pada saat gain 20, reset 0.1 respon untuk berubah ke set point yang baru lebih cepat 2 sekon yaitu 22 s dibandingkan pada saat gain 20, reset 0.2 sebesar 24 s.
Gambar 3.9 Respon PID-controller Terhadap Level Pada Kasus Servo dengan
Gain 20, Reset 0.2, Rate 0.1 dan Gain 20, Reset 0.2, Rate 0.4
Dari Gambar 3.12 dapat dilihat bahwa perbedaan rate (τd) pada
proposional integral derivatif controller kasus servo menunjukkan respon yang berbeda. Perubahan yang terjadi yaitu respon controller untuk mencapai set point
yang mengalami perubahan. Pada gain 20, reset 0.2, rate 0.1 respon untuk berubah ke set point yang baru lebih lama yaitu 18 s dibandingkan pada saat gain
Sedangkan dinamika flow ditunjukkan pada Gambar 3.10, 3.11, dan 3.12.
Gambar 3.10 Respon P-controller Terhadap Flow Pada Servo dengan Gain 10 dan Gain 20
Gambar 3.12 Respon PID-controller Terhadap Flow Pada Servo dengan Gain 20,
Reset 0.2, Rate 0.1 dan Gain 20, Reset 0.2, Rate 0.4
Penggunaan kontroler tipe P dapat dilihat pada Gambar 3.10. P controller cenderung meninggalkan offset. Offset dapat dihilangkan dengan meningkatkan
gain proportional. Tipe PI dengan reset yang lebih besar cenderung lebih stabil. Tipe PID memiliki sifat stabil, tidak terpengaruh offset dan responsif. Akan tetapi tipe PID cenderung mudah terpengaruh noise sehingga perlu dilakukan optimasi
gain, reset dan rate. Dari Gambar 3.10, 3.11, dan 3.12 dapat dilihat flow
cenderung menurun, hal ini disebabkan level telah mencapai set point jadi untuk mengontrol agar level tidak melebihi set point maka flow mengalami penurunan. 3.3 Respon Level, Pressure, dan Flow pada Kasus Regulatory
Pada kasus regulatory, sistem yang mulai stabil diberi gangguan jenis step. Gangguan tersebut dilakukan dengan cara memperbesar bukaan pada valve V4 dari 90o menjadi 180o sampai proses stabil. Adanya gangguan tersebut
Gambar 3.13 Respon P-controller Terhadap Level Pada Regulatory (Step) dengan
Gain 10 dan Gain 20
Gambar 3.13 menunjukkan adanya fluktuasi level akibat adanya gangguan sistem dari luar. Setelah mengalami gangguan, sistem akan berusaha kembali ke set pointnya. Pada gain 10 sinyal output yang dihasilkan lebih lambat mencapai
set point dibandingkan pada saat gain 20. Gain 10 mencapai set pointnya kembali pada detik ke 22 sekon, dan gain 20 mencapai set point pada detik ke 8 sekon.
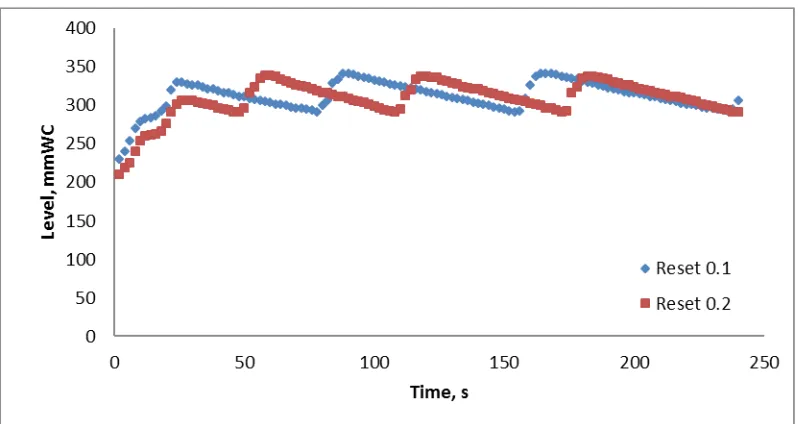
Gambar 3.14 Respon PI-controller Terhadap Level Pada Kasus Regulatory(Step)
dengan Gain 20, Reset 0.1 dan Gain 20, Reset 0.2
pengendali cenderung mudah berosilasi. Dari Gambar 3.14 dapat dilihat bahwa perbedaan reset (τi) pada proposional integral (PI-controller) kasus regulatory
menunjukkan respon yang berbeda. Dari Gambar 3.14 dapat dilihat pada gain 20,
reset 0.1 sinyal output yang dihasilkan lebih cepat mencapai set point yaitu pada detik ke 30 dibandingkan pada saat gain 20, reset 0.2 yang mencapai set point pada detik ke 36.
Gambar 3.15 Respon PID-controller Terhadap Level Pada Kasus Regulatory (Step) dengan Gain 20, Reset 0.2, Rate 0.1 dan Gain 20, Reset 0.2, Rate 0.4
Dari Gambar 3.21 dapat dilihat bahwa perbedaan rate (τd) pada
Dinamika flow untuk proses regulatory, dapat dilihat pada Gambar 3.16, 3.17, dan 3.18.
Gambar 3.16 Respon P-controller Terhadap Flow Pada Kasus Regulatory(Step)
dengan Gain 10 dan Gain 20
Gambar 3.18 Respon PID-controller Terhadap Flow Pada Kasus Regulatory (Step) dengan Gain 20, Reset 0.2, Rate 0.1 dan Gain 20, Reset 0.2, Rate 0.4
Penggunaan kontroler tipe P dapat dilihat pada Gambar 3.16. P-controller
cenderung meninggalkan offset. Offset dapat dihilangkan dengan meningkatkan
gain proportional. Dengan adanya penambahan tipe integral maka offset yang terjadi berkurang, hal ini dapat dilihat pada Gambar 3.17. Pada Gambar 3.17 terlihat offset yang terjadi lebih kecil daripada Gambar 3.16. Tipe PI dengan reset
yang lebih besar cenderung lebih stabil. Pada Gambar 3.18 terlihat osilasi kurva bertambah daripada Gambar 3.17 akan tetapi memiliki offset lebih kecil. Tipe PID memiliki sifat stabil, akan tetapi tipe PID cenderung mudah terpengaruh noise sehingga perlu dilakukan optimasi gain, reset dan rate.
Pada kasus regulatory, sistem yang mulai stabil diberi gangguan jenis
pulse. Gangguan tersebut dilakukan dengan cara memperbesar bukaan pada valve
V4 dari 180o menjadi 90o selama 3 menit kemudian memperkecil bukaan valve V4
dari 90o menjadi 180o kemudian memperkecil bukaan kembali valve V4 dari 180o
menjadi 90o dan dilihat kembali selama 3 menit. Adanya gangguan tersebut
Gambar 3.19 Respon P-controller Terhadap Level Pada Regulatory (Pulse)
dengan Gain 10 dan Gain 20
Gambar 3.20 Respon PI-controller Terhadap Level Pada Kasus Regulatory (Pulse) dengan Gain 20, Reset 0.1 dan Gain 20, Reset 0.2
Penambahan fungsi aksi integral pada pengendali proposional bertujuan untuk menghilangkan offset. Dari Gambar 3.20 dapat dilihat bahwa perbedaan
reset (τi)pada proposional integral (PI-controller) kasus regulatory menunjukkan
respon yang berbeda. Dari Gambar 3.20 dapat dilihat bahwa pada gain 20, reset
0.1 3 menit pertama dan 3 menit ketiga sedikit terjadi fluktuasi karena pembesaran bukaan valve sedangkan pada 3 menit kedua sistem pengendali kembali merespon gangguan dengan terjadi banyak fluktuasi. Sedangkan pada gain 20, reset 0.2 pada 3 menit pertama dan 3 menit ketiga respon yang diberikan oleh sistem menyebabkan kenaikan ketinggian level tanpa penuruan sedangkan pada 3 menit kedua terjadi fluktuasi pada ketinggian level ketika terjadi pengecilan bukaan
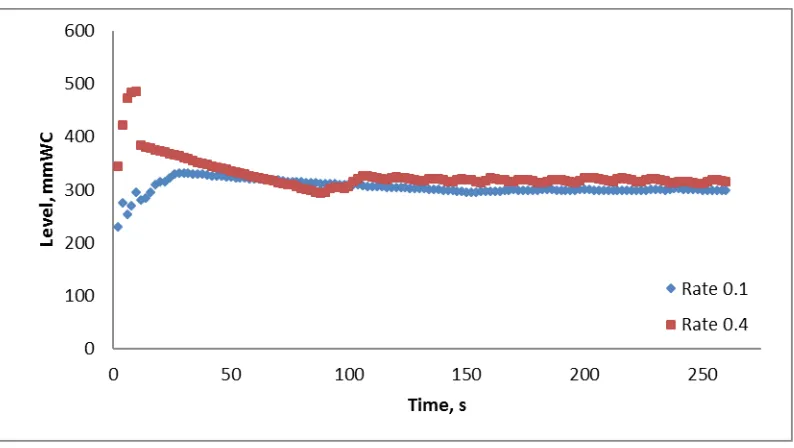
Gambar 3.21 Respon PID-controller Terhadap Level Pada Kasus Regulatory (Step) dengan Gain 20, Reset 0.2, Rate 0.1 dan Gain 20, Reset 0.2, Rate 0.4
Dari Gambar 3.21 dapat dilihat bahwa perbedaan rate (τd) pada
proposional integral derivatif controller kasus regulatory menunjukkan respon yang berbeda. Pada gain 20, reset 0.2, rate 0.4 dinamika level yang dihasilkan tidak bergerak jauh dari setpoint hal ini dapat disebabkan karena
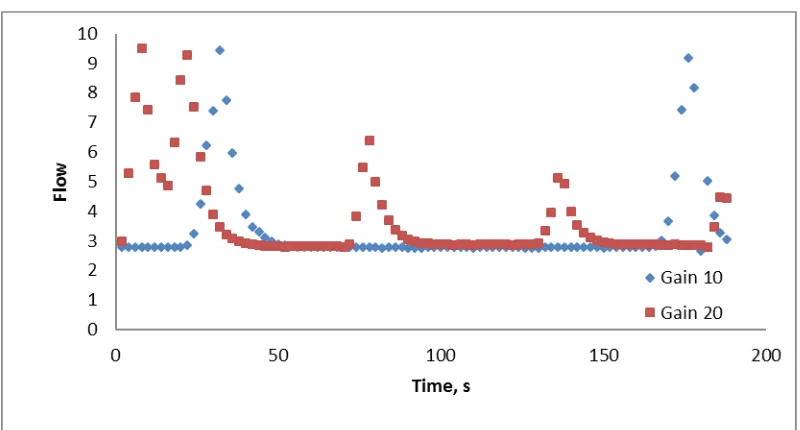
Gambar 3.22 Respon P-controller Terhadap Flow Pada Kasus Regulatory(Step)
dengan Gain 10 dan Gain 20
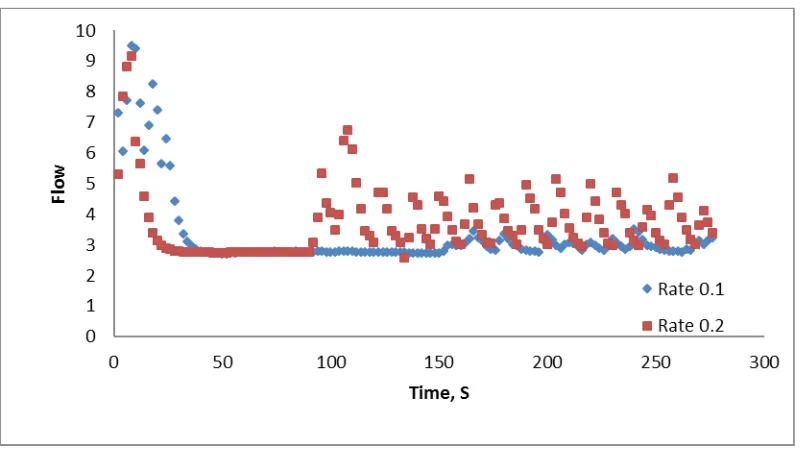
Gambar 3.23 Respon PI-controller Terhadap Flow Pada Kasus Regulatory(Step)
Gambar 3.24 Respon PID-controller Terhadap Flow Pada Kasus Regulatory (Step) dengan Gain 20, Reset 0.2, Rate 0.1 dan Gain 20, Reset 0.2, Rate 0.4
Penggunaan kontroler tipe P dapat dilihat pada Gambar 3.16. P-controller
cenderung meninggalkan offset. Offset dapat dihilangkan dengan meningkatkan