STUDI SISTEM PENGENDALIAN KADAR OKSIGEN DI DALAM AIR PADA THERMAL DEAERATOR DI PABRIK KELAPA SAWIT MURINI
SAM SAM-I
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
UMMI FAHRINA 070801003
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : STUDI PENGENDALIAN KADAR OKSIGEN DI
DALAM AIR PADA DEAERATOR DI PABRIK KELAPA SAWIT MURINI SAM SAM I
Kategori : SKRIPSI
Nama : UMMI FAHRINA
Nomor Induk Mahasiswa : 070801003
Program Studi : SARJANA (S1) FISIKA
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUA
ALAM (FMIPA) UNIVERSITAS SUMATERA
UTARA
Diluluskan di
Medan, Mei 2012
Diketahui/Disetujui oleh
Departemen Fisika FMIPA USU
Ketua,
Dr. Marhaposan Situmorang
NIP 195510301980031003
Pembimbing-I Pembimbing-II
Dr. Mester Sitepu, M.Sc, M.Phill Dr. Susilawati, S.Si., M.Si.
PERNYATAAN
STUDI SISTEM PENGENDALIAN KADAR OKSIGEN DI DALAM AIR PADA THERMAL DEAERATOR DI PKS MURINI SAM SAM-I
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Mei 2012
UMMI FAHRINA
PENGHARGAAN
Puji dan syukur penulis panjatkan kehadirat Allah SWT yang Maha Pemurah
lagi Maha Penyayang yang telah memberikan Rahmat, Karunia dan Bimbingan-Nya
sehingga penulis dapat menyelesaikan skripsi ini dengan waktu yang ditetapkan.
Ucapan terima kasih penulis sampaikan kepada Dr. Mester Sitepu, M.Sc, M.Phil, dan Dra. Susilawati M.Sc, selaku dosen pembimbing I dan II dalam menyelesaikan skripsi ini yang telah memberikan panduan dan arahan kepada saya
untuk penyempurnaan skripsi ini, selanjutnya ucapan terima kasih penulis ucapkan
kepada PT. MURINI SAM SAM-I yaitu Bapak Alimin sitohang selaku manager dan
Bapak Andre selaku pembimbing di lapangan yang telah memberikan bimbingan,
waktu dan tenaga kepada penulis dalam penyelesaian skripsi ini. Ucapan terima kasih
juga diberikan kepada Dr. Kerista Tarigan, M.Eng.Sc, Drs. Takdir Tamba, M.Eng.Sc, dan Dr. Marhaposan situmorang, selaku dosen pembanding yang telah banyak memberikan saran dan masukan dalam penyempurnaan skripsi ini dan juga kepada Ketua dan Sekretaris Jurusan Departemen Fisika Dr. Marhaposan Situmorang dan Dra.
Justinon. MSi, Dekan FMIPA USU Dr. Sutarman,Msc serta semua Staf Pengajar dan
Pegawai Departemen Fisika FMIPA USU. Tidak lupa pula penulis ucapkan terima
kasih kepada teman-teman dan semua mahasiswa Fisika khususnya stambuk 2007,
yaitu Oki Handinata, Moraida Hasanah, Angel Pratiwi, Rusdalena, Ichsan, Hilman,
Julia Fadilla, Suci Ramadhani, Juli Harni, Eva Suraya, Eva rosdiyanti, Irhan Hanim,
Rahma, Siska Futri Nst, Ismatul Husna, Juriah semangat, syifa, Prisca, Lokita, Jandri,
Jhon Dalton, Ita, Maria Irma, serta Junior dan senior yang telah membantu saya( Bang
Hendri Yogi, Andy syahreza dan Gilang Perkasa Rizki ) yang selalu memotivasi
Akhirnya tidak pernah terlupakan tanda bakti kami kepada Ayahanda (Drs.
Amir Faisal) dan Ibunda (Rosnizar) yang telah memberikan dukungan baik materil
maupun moril selama mengikuti perkuliahan, dan kepada kakak-kakak(Nisa Amalia
dan Fitri Fadia) dan juga adik-adik tercinta (Hani Fahdina dan Habib Hammadi) yang
selalu mendoakan dan mendukung saya, dan akhirnya kepada seluruh keluarga besar
Embah di Duri yang mau menerima saya di rumahnya dan keluarga besar di Perawang
(Yayuk, Bang Supri, Bang Bambang, Bang Manto, bang Dedi, kak Hapni dll) yang
dengan setia dan sabar mengantarkan saya ke Duri. Dan juga kepada kedua orang tua
Moraida hasanah dan Angel Pratiwi yang turut serta membantu saya dalam
menyelesaikan skripsi ini dan mereka tidak dapat disebutkan satu persatu, penulis
ucapkan terima kasih.
STUDI SISTEM PENGENDALIAN KADAR OKSIGEN DI DALAM AIR PADA THERMAL DEAERATOR DI PABRIK KELAPA SAWIT MURINI
SAM SAM-I ABSTRAK
Penelitian tentang sistem pengendalian Thermal Deaerator dengan menentukan
seberapa besar Temperatur dan Tekanan yang bisa dikontrol untuk menghilangkan
kadar oksigen di dalam air. Penelitian dilakukan dipabrik kelapa sawit (PKS) Murini
Sam Sam 1 Duri, Riau. Pada proses pengendalian ini digunakan metode PI dan
Routh-Hurwitz. Hasil yang didapat dengan menggunakan metode PI yaitu nilai Kc = 0,4 dan
PB= 250% lebih stabil dibandingkan yang lainny. Metode Routh-Hurwitz yaitu nilai
Routhnya (S4 = 0.04 ; 0.18; 0,000012); (S3= 0.4; 0.003; 0); (S2= 0.18; 0.000012; 0);
(S1= 0.032; 0; 0); (S0 = 0.000012; 0; 0) dan Hurwitznya (0.4; 0.072; 0.000213), karena
bernilai positif maka dapat dikatakan stabil sama pada karakteristik yang ada pada
STUDY OF OXYGEN CONTROL SYSTEM IN WATER AT THERMAL DEAERATOR AT PALM OIL FACTORY MURINI SAM SAM-I
ABSTRACT
Research about control system at thermal Deaerator with make how many temperature
and Pressure can controlled to lose standart oxygen in water. The Research do in Palm
oil factory Murini Sam Sam 1 Duri, Riau. At the Process control is used PI and
Routh-Hurwitz method. The result can gotten by use PI method are value of Kc= 0.4 and
PB= 250%, more stabil than others. For Routh-Hurwitz method are value of Routh (S4
= 0.04 ; 0.18; 0,000012); (S3= 0.4; 0.003; 0); (S2= 0.18; 0.000012; 0); (S1= 0.032; 0;
0); (S0 = 0.000012; 0; 0) and Hurwitz (0.4; 0.072; 0.000213), because positive value
DAFTAR ISI
Halaman
Persetujuan iii
Pernyataan iv
Penghargaan v
Abstract vii
Daftar Isi ix
Daftar Tabel x
Daftar Gambar xi
Bab 1 Pendahuluan
1.1 Latar Belakang 1
1.2 Permasalahan
1.2.1 Identifikasi Masalah 2
1.2.2 Batasan Masalah 3
1.3Tujuan Penelitian 3
1.4 Manfaat Penelitian 4
1.5 Tempat Penelitian 4
1.6 Sistematika Penulisan 4
Bab 2 Tinjauan Pustaka
2.1 Teori Dasar Sistem Pengendalian 6
2.1.1 Istilah dan Elemen dalam Sistem Pengendalian 7
2.1.2 Prinsip Prinsip Sistem Pengendalian 10
2.1.3 Pengelompokan Sistem Pengendalian 11
2.1.4 Mode Pengendalian pada Industri 14
2.2 Model Matematik Sistem Dinamik 15
2.3 Model Matematik Sistem Fisik 16
2.3.1 Transformasi Laplace 16
2.3.2 Fungsi Alih 17
2.3.3 Digram Blok 18
2.4.1 Kriteria Kestabilan Routh 21
2.4.2 Kriteria Kestabilan Hurwitz 23
2.5 Hukum Termodinamika 26
2.6 Thermal Deaerator 28
2.6.1 Data Teknis Deaerator 31
2.62 Jenis-jenis Deaerator 32
Bab 3 Sistem Pengendalian Temperatur dan Tekanan pada Deaerator 37
3.1 Waktu dan Tempat Penelitian 37
3.1.1 Waktu Penelitian 37
3.1.2 Tempat penelitian 37
3.2 Proses Pengendalian Kadar Oksigen 38
3.2.1 Pemodelan dan Perancangan sistem Deaerator 38
3.2.2 Pengendali (Controller) 40
3.2.3 Transmitter 42
3.2.3.1 Tekanan Transmitter 42
3.2.3.2 Temperatur Transmitter 43
3.2.4 Control Valve 44
3.2.5 Penurunan Persamaan Gas Ideal Untuk Proses 45
3.3 Metode yang digunakan 46
3.3.1 PI 46
` 3.3.2 Metode Routh-Hurwitz 46
3.3.3 Uji Kestabilan dengan Respon Frekuensi 47
3.4 Perancangan Program 47
3.5 Diagram Alir 47
Bab 4 Data dan Analisa Data
4.1 Data 49
4.1.1 Data Controller 49
4.1.2 Data Transmitter 50
4.1.3 Data Temperatur dan Tekanan Stork tank 50
4.1.4 Data Steam 50
4.1.5 Data Control valve 50
dan Tekanan Air pada Deaerator 51
4.3 Analisis Kestabilan Sistem Pengendalian Temperatur dan Tekanan
pada Deaerator 57
4.3.1 Metode Kestabilan Routh 57
4.3.2 Metode Kestabilan Hurwitz 60
4.3.3 Uji Respon Kestabilan sistem pengendalian
dengan metode frekuensi 62
Bab 5 Kesimpulan dan Saran
5.1 Kesimpulan 73
5.2 Saran 74
Daftar Pustaka 75
DAFTAR TABEL
Halaman
Tabel 4.1 Data dari Controller 49
DAFTAR GAMBAR
Halaman
Gambar 2.1 Pengendalian Level didalam Tangki oleh Manusia 10
Gambar 2.2 Sistem Pengendalian Loop Terbuka 12
Gambar 2.3 Sistem Pengendalian Loop Tertutup 13
Gambar 2.4 Sistem Pengendalian Bertingkat 13
Gambar 2.5 Diagram Blok 19
Gambar 2.6 Diagram Blok Sistem Pengendalian Loop Tertutup 19
Gambar 2.7 Sistem Pengendalian Loop Tertutup dengan Umpan Balik H(s) 20
Gambar 2.8 Contoh Grafik Kestabilan Sistem 25
Gambar 2.9 Deaerator dan bagian-bagiannya 31
Gambar 2.10 Deaerator Spray 32
Gambar 2.11 Deaerator vakum 33
Gambar 2.12 Deaerator tray 34
Gambar 2.13 Control Valve 35
Gambar 3.1 Diagram proses Deaerator Tempertur dan Pressure 38
Gambar 3.2 Diagram Blok Sistem Pengendalian Temperatur dan tekanan 39
Gambar 3.3 Diagram Blok Sistem Transmisi Pnumatik 42
Gambar 3.4 Blok Tekanan Transmitter dengan gain 43
Gambar 3.5 Blok Temperatur Transmitter dengan gain 44
Gambar 3.6 Blok Control valve dengan gain 44
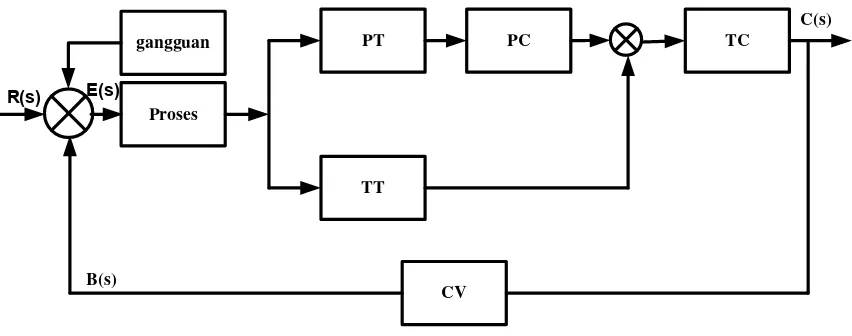
Gambar 4.1 Diagram Blok Temperatur Controller 51
Gambar 4.2 Diagram Blok Pressure Controller 52
Gambar 4.3 Diagram Blok Gangguan 53
Gambar 4.4 Diagram Blok Proses 54
Gambar 4.5 Diagram Blok Control valve 55
Gambar 4.6 Diagram Blok Fungsi Alih Sistem Kendali 56
Gambar 4.7 Diagram Blok Fungsi Alih dengan nilai Parameternya 56
Gambar 4.8 Diagram Blok dengan Kc = 2 63
Temperatur dengan nilai Kc = 2 64
Gambar 4.10 Diagram Blok dengan Kc = 1 65
Gambar 4.11 Grafik simulasi sistem kendali tekanan dan
Temperatur dengan nilai Kc = 1 66
Gambar 4.12 Diagram Blok dengan Kc = 0.66 67
Gambar 4.13 Grafik simulasi sistem kendali tekanan dan
temperatur dengan nilai Kc 0.66 68
Gambar 4.14 Diagram Blok dengan nilai Kc = 0.5 69
Gambar 4.15 Grafik simulasi sistem kendali tekanan dan
temperatur dengan nilai Kc = 0.5 70
Gambar 4.16 Diagram Blok dengan Kc = 0.4 71
Gambar 4.17 Grafik simulasi sistem kendali tekanan dan
STUDI SISTEM PENGENDALIAN KADAR OKSIGEN DI DALAM AIR PADA THERMAL DEAERATOR DI PABRIK KELAPA SAWIT MURINI
SAM SAM-I ABSTRAK
Penelitian tentang sistem pengendalian Thermal Deaerator dengan menentukan
seberapa besar Temperatur dan Tekanan yang bisa dikontrol untuk menghilangkan
kadar oksigen di dalam air. Penelitian dilakukan dipabrik kelapa sawit (PKS) Murini
Sam Sam 1 Duri, Riau. Pada proses pengendalian ini digunakan metode PI dan
Routh-Hurwitz. Hasil yang didapat dengan menggunakan metode PI yaitu nilai Kc = 0,4 dan
PB= 250% lebih stabil dibandingkan yang lainny. Metode Routh-Hurwitz yaitu nilai
Routhnya (S4 = 0.04 ; 0.18; 0,000012); (S3= 0.4; 0.003; 0); (S2= 0.18; 0.000012; 0);
(S1= 0.032; 0; 0); (S0 = 0.000012; 0; 0) dan Hurwitznya (0.4; 0.072; 0.000213), karena
bernilai positif maka dapat dikatakan stabil sama pada karakteristik yang ada pada
STUDY OF OXYGEN CONTROL SYSTEM IN WATER AT THERMAL DEAERATOR AT PALM OIL FACTORY MURINI SAM SAM-I
ABSTRACT
Research about control system at thermal Deaerator with make how many temperature
and Pressure can controlled to lose standart oxygen in water. The Research do in Palm
oil factory Murini Sam Sam 1 Duri, Riau. At the Process control is used PI and
Routh-Hurwitz method. The result can gotten by use PI method are value of Kc= 0.4 and
PB= 250%, more stabil than others. For Routh-Hurwitz method are value of Routh (S4
= 0.04 ; 0.18; 0,000012); (S3= 0.4; 0.003; 0); (S2= 0.18; 0.000012; 0); (S1= 0.032; 0;
0); (S0 = 0.000012; 0; 0) and Hurwitz (0.4; 0.072; 0.000213), because positive value
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Di dunia Industri yaitu Pembangkit tenaga Listrik dan Pabrik kelapa sawit
memerlukan mesin atau alat yang dapat membantu kinerja pabrik tersebut, yaitu
dalam mempertahankan atau menjaga kelangsungan dari mesin pabrik tersebut dari
kerusakan terutama pada Boiler. Karena Boiler mempunyai peranan yang sangat
penting dalam kelangsungan kinerja dari sebuah pabrik dengan kata lain bisa
dikatakan sebagai jantung dari sebuah pabrik. Untuk itulah dibutuhkan alat yang dapat
membantu memperpanjang usia Boiler dari kerusakan yang disebabkan oleh korosi.
Alat tersebut yaitu Thermal Deaerator.
Thermal Deaerator adalah sebuah alat yang dapat bekerja untuk membuang gas-gas
terlarut seperti oksigen yang terkandung dalam air umpan boiler, setelah melalui proses pemurnian
air (water treatment). Selain itu juga deaerator berfungsi sebagai pemanas awal air
pengisi ketel sebelum disalurkan ke dalam boiler. Deaerator ini bekerja berdasarkan
sifat dari oksigen yang kelarutanya pada air akan berkurang dengan adanya kenaikan suhu.
Deaerator terdiri dari dua drum dimana drum yang lebih kecil merupakan tempat
pemanasan pendahuluan yang berfungsi membuang gas-gas dari bahan air ketel sedangkan drum
yang lebih besar merupakan tempat penampungan bahan air ketel yang jatuh dalam drum
yang lebih kecil di atasnya. Untuk itulah dibutuhkan sistem pengendalian temperatur
sehingga keseimbangan tetap terjaga.
Pengendalian temperatur dan tekanan air pada Thermal Deaerator dapat
dilakukan secara konvensional dan digital. Secara konvensional ada beberapa elemen
yang yang berpengaruh yang harus dikendalikan bersama sama yaitu aliran air (feed
water) dan control valve. Sedangkan secara digital dapat diketahui melalui ruang
kontrol.
PT. Wilmar Group terutama PKS Murini Sam Sam-I merupakan salah satu
perusahaan yang bonafit yang juga menggunakan Thermal deaerator untuk membantu
kerusakan pada boiler yang bisa dikatakan juga sebagai jantung dari suatu pabrik.
Selain itu juga dapat mengurangi biaya produksi pabrik, karena pabrik dapat
mengurangi penggunaan zat kimia untuk membantu menghilangkan oksigen tersebut.
Untuk itulah penulis ingin meneliti bagaimana proses pengendalian pada Thermal
Deaerator sehingga dapat menghilangkan zat-zat terlarut di dalam air. Dengan metode
PI dan Routh-Hurwitz serta uji kestabilan yang divisualisasikan dalam bentuk kurva
dengan program Matlab, penulis ingin memberitahukan bahwa alat tersebut masih
layak atau tidak untuk digunakan. Dan dengan adanya parameter-parameter di atas,
dapat membantu penulis dalam menghitung dengan menggunakan metode-metode di
atas.
1.2 Permasalahan 1.2.1 Identifikasi Masalah
Pabrik kelapa sawit (PKS) harus cermat dalam mengelola pabrik agar hasil
yang didapat sesuai yang dengan yang diinginkan. Tapi untuk mendapatkan hasil yang
diinginkan kondisi pabrik harus tetap terjaga dengan baik terutama pada Boiler. Untuk
memperpanjang umur boiler, pencegahan terhadap korosi harus dilakukan yaitu
dengan cara menggunakan Thermal Deaerator untuk mengurangi kadar oksigen yang
terkandung di dalam air yang akan diumpan ke dalam Boiler. Maka dari identifikasi
tersebut permasalahan dalam penelitian ini adalah:
a. Bagaimana menghitung sistem pengendalian kadar oksigen di dalam air pada
thermal deaerator dengan melihat seberapa besar pengaruh temperatur terhadap
kadar oksigen di dalam air.
b. Bagaimana mengetahui seberapa besar tekanan mempengaruhi temperatur
pada thermal deaerator.
c. Bagaimana menghitung pengendalian kadar oksigen di dalam air pada thermal
deaerator dengan menggunakan metode kestabilan routh hurwitz dan metode
PI controlled.
d. Bagaimana mengetahui pengontrolan PI pada sistem pengendalian kadar
oksigen di dalam air pada thermal deaerator yang hasilnya akan ditampilkan
1.2.2 Batasan Masala
Penelitian mengenai sistem pengendalian kadar oksigen di dalam air pada
thermal deaerator pada PKS MSS1 dibatasi pada:
a. Membahas sistem pengendalian temperature dan tekanan berdasarkan
parameter – parameter alat yang digunakan.yaitu controller, temperatur dan
tekanan transmitter, valve.
b. Parameter yang diamati berupa Temperatur dan Tekanan pada stork tank yang
sangat berpengaruh terhadap pelepasan zat terlarut dalam air yaitu berupa
oksigen.
c. Menggunakan metode kestabilan Routh hurwitz dan PI controlled.
d. Membuat simulasi dengan menggunakan Matlab.
1.3 Tujuan Penelitian
Dengan latar belakang yang telah diutarakan maka adapun tujuan penelitian ini
adalah:
1. Mengetahui sistem pengendalian Thermal Deaerator dengan menentukan
seberapa besar Temperatur dan Tekanan yang bisa dikontrol untuk
menghilangkan kadar Oksigen di dalam air yang berasal dari Feed Water Tank.
2. Menghitung sistem pengendalian Thermal deaerator dengan menggunakan
metode kestabilan routh Hurwitz dan PI controlled.
3. Untuk mengetahui PI controll pada sistem pengendalian Temperatur pada
Thermal Deaerator yang hasilnya akan ditampilkan dalam bentuk kurva
dengan menggunakan Matlab.
1.4 Manfaat Penelitian
Mengenalkan dan memahami prinsip kinerja dari Thermal Deaerator pada PKS
MSS1 dan mengetahui kestabilan alat tersebut dengan metode PI dan Routh-Hurwitz
dengan uji frekuensi yang divisualisasikan dalam bentuk kurva oleh MATLAB.
Sehingga, kita dapat mengetahui bahwa alat tersebut masih layak atau tidak untuk
1.5 Tempat Penelitian
Penelitian dilakukan di PKS Murini Sam Sam-I yang berada di Riau yaitu
tepatnya duri.
1.6 Sistematika Penulisan
Sistematika penulisan skripsi ini pada masing – masing bab adalah sebagai berikut:
BAB I Pendahuluan
Bab ini membahas latar belakang dari penelitian, identifikasi dan
batasan masalah yang akan diteliti, tujuan dari penelitian,
manfaat penelitian dan sistematika penulisan.
BAB II Tinjauan Pustaka
Bab ini membahas tentang landasan teori yang digunakan
sebagai acuan dari penelitian ini.
BAB III Metodologi Penelitian
Bab ini membahas tentang peralatan dan bahan yang digunakan
dalam penelitian, diagram alir penelitian.
BAB IV Hasil dan Pembahasan
Bab ini mencakup data yang diperoleh dari penelitian serta
analisa data yang diperoleh dari penelitian.
BAB V Kesimpulan dan Saran
Bab ini membahas tentang kesimpulan yang diperoleh dari
penelitian yang dilakukan dan memberikan saran untuk
BAB II
TINJAUAN PUSTAKA
2.1 Teori Dasar Sistem Pengendalian
Sistem pengendalian adalah susunan komponen komponen fisik yang dirakit
sedemikian rupa sehingga berfungsi untuk mengendalikan sistem itu sendiri atau
sistem lain yang berhubungan dengan sebuah proses. Atau dengan pengertian lain
sistem pengendalian adalah suatu proses / pengendalian terhadap suatu atau beberappa
besaran sehingga berada pada suatu harga atau range tertentu. Hampir semua proses
dalam dunia industri membutuhkan peralatan-peralatan otomatis untuk mengendalikan
parameter – parameter prosesnya. Otomatisasi tidak saja diperlukan demi kelancaran
operasi, keamanan, ekonomi, maupun mutu produk, tetapi lebih merupakan kebutuhan
pokok. Kita tidak akan mungkin menjalankan suatu proses industri tanpa sistem
pengendalian, contohnya pengendalian disuatu proses pengilangan minyak.
Ada banyak parameter yang harus dikendalikan di dalam suatu proses. Di
antaranya, yang paling umum, adalah tekanan (pressure) di dalam sebuah vassel atau pipa, aliran (flow) didalam pipa, suhu (temperature) di unit proses seperti heat exchanger, atau permukaan zat cair (level) disebuah tangki. Dan ada beberapa parameter lain diluar keempat parameter diatas yang cukup penting dan juga perlu
dikendalikan karena kebutuhan spesifik proses, diantaranya : pH di industri
petrokimia, water cut (BS & W) di ladang minyak mentah, warna produk di suatu fasilitas pencairan gas (NGL) dan sebagainya.
Gabungan serta kerja alat – alat pengendalian otomatis itulah yang dinamakan
sistem pengendalian proses (process control system). Sedangkan semua peralatannya yang membentuk sistem pengendalian disebut instrumentasi pengendalian proses
Pada akhirnya pengendalian otomatis memegang peranan penting dan
memberikan kemudahan dalam mendapatkan performansi dalam suatu sistem
dinamik, mempertinggi kualitas, menurunkan biaya produksi dan mempertinggi laju
produksi, serta meniadakan pekerjaan pekerjaan rutiin yang harus dilakukan oleh
manusia. Namun semua peran operator manual digantikan oleh sebuah alat yang
disebut controller. Tugas membuka dan menutup valve tidak lagi dikerjakan oleh operator tetapi atas perintah controller. Untuk keperluan pengendalian otomatis, valve harus dilengkapi dengan alat yang disebut actuator , sehingga unit valve yang sekarang menjadi unit yang disebut control valve. Semua peralatan pengendalian inilah (controller dan control valve) yang disebut sebagai instrumentasi pengendalian proses.
2.1.1 Istilah dan Elemen Elemen Dalam Sistem Pengendalian
a. Process (Proses)
Dalam kamus Merriam – Webster mendefinisikan proses sebagai operasi atau
perkembangan alamiah yang berlangsung secara kontinyu yang ditandai oleh
suatu deretan perubahan kecil yang berurutan dengan cara yang relative
tetapdan menuju kesuatu hasil atau keadaan akhir tertentu. Atau tatanan
peralatan yang mempunyai suatu fungsi tertentu. Input proses dapat bermacam
macam, yang pasti ia merupakan besaran yang dapat dimanipulasi oleh final control element atau control valve agar measurement variable sama dengan set point.
b. Plant
Plant adalah seperangkat peralatan, mungkin hanya terdiri dari beberapa
bagian mesin yang bekerja bersama - sama, yang dilakukan untuk melakukan
suatu operasi tertentu. Atau dengan kata lain plant adalah objek yang
dikendalikan.
c. System (sistem)
Sistem adalah kombinasi dari beberapa komponen yang bekerja bersama sama
d. Controlled Variable
Controlled variable adalah besaran atau variable yang dikendalikan. Besaran ini pada diagram kotak disebut juga dengan out put proses atau process variable.
e. Manipulated Variable
Manipulated variable adalah input dari suatu proses yang dapat dimanipulasi
atau di ubah ubah besarnya agar process variable atau control variable besarnya sama dengan set point
f. Disturbance (Gangguan)
Disturbance adalah suatu sinyal yang cenderung mempunyai pengaruh yang merugikan pada harga keluaran system,atau biassa disebut dengan besaran
lain, manipulated variable yang menyebabkan berubahnya controlled variable , besaran ini juga lazim disebut dengan load.
g. Sensing Element
Sensing Element adalah bagian yang paling ujung suatu sistem pengukuran (measuring system), bagian ini juga disebut dengan sensor atau primary
element.
h. Transducer dan Transmitter
Transducer adalah unit pengalih sinyal sedangkan transmitter adalah alat yang berfungsi membaca sinyal sensing element dan mengubahnyya menjadi sinyal yang dapat dimengerti oleh controller. Transmitter lebih khusus pemakainnya dalam sistem pengukuran.
i. Measurrement Variable
Measurement variable adalah sinyal yang keluar dari transmitter. Besaran ini merupakan cerminan besarnya sinyal sistem pengukuran.
j. Set point
Set point besar process variable yang dikehendaki. Sebuah controller akan selalu berusaha menyamakan controlled variable dengan set point.
Error adalah selisih antara set point dikurangi dengan measured variable. Error bisa negatif dan bisa juga positif. Bila set point lebih besar dari measured variable demikian sebaliknya bila set point lebih kecil dari measured variable maka error akan negatif.
l. Controller
Controller adalah element yang mengerjakan tiga dari empat tahap langkah pengendalian yaitu membandingkan set point dengan measurement variable, menghitung berapa banyak koreksi yang dilakukan, dan mengeluarkan sinyal
koreksi sesuai dengan hasil perhitungan tadi. Controller sepenuhnya menggantikan peran manusia dalam meengendalikan sebuah proses.
Controller sering diterjemahkan sebagai alat pengendali.
m. Feedback (Umpan Balik)
Umpan balik adalah sifat dari suatu sistem untaian tertutup yang
memungkinkan keluarannya bisa dibandingkan dengan masukan sistem itu
agar tindakan pengendalian yang tepat sebagai fungsi dari keluaran dan
masukannya bisa terjadi.
n. Final Control Element
Final control element adalah bagian terakhir dari instrumentasi sistem pengendalian. Bagian ini berfungsi untuk mengubah measurement variable dengan cara memanipulasi besarnya manipulated variable, berdasarkan perintah controller.
2.1.2 Prinsip Prinsip Sistem Pengendalian
Persyaratan umum dari system pengendalian adalah setiap elemen dari system
pengendalian haruslah stabil. Ini merupakan persyaratan utama. Disamping kestabilan
mutlak, suatu system pengendalian harus mempunyai kestabilan relative yang layak,
jadi kecepatan respon harus cukup cepat dan menuju peredaman yang layak. Suatu
sampai pada suatu harga yang dapat ditoleransi. Mari kita lihat sebuah contoh kasus
dari gambar dibawah ini:
Set point
Level
Tangki
Pabrik
Gambar 2.1 Pengendalian level di dalam tangki oleh manusia
Pada sistem pengendalian gambar 2.1, pertama operator harus mengamati
ketinggian level, kemudian mengevaluasi apakah level yang ada sudah seperti yang
dikehendakinya. Kalau level tidak sama dengan yang dikehendakinya, operator harus
memperkirakan seberapa banyak valve perlu lebih ditutup atau lebih dibuka.
Selanjutnya operator harus benar benar mengubah bukaan valve sesuai dengan yang
diperkirakan tadi. Jika dikaji lebih jauh, dalam mengendalikan proses operator
mengerjakan empat langkah yaitu mengukur, membandingkan, menghitung dan mengoreksi.
Pada waktu operator mengamati ketinggian level maka yang ia kerjakan
sebenarnya adalah langkah mengukur proses variable dan process variablenya adalah level. Kemudian operator membandingkan apakah hasil pengukuran tadi sesuai dengan apa yang dikehendakinya. Besar process variable itu disebut dengan set point. Pada contoh ini kita umpamakan level selalu 50%, set point didalam sistem pengendalian ini besarnya 50%. Perbedaan antara process variable dan set point disebut dengan error. Berdasarkan error itulah operator menentukan arah dari bukaan
valve.
Seorang operator yang berpengalaman tidak sembarang membuka atau
menutup valve. Ia juga akan memperkirakan seberapa banyak valve perlu lebih dibuka
atau ditutup. Pada tahapan ini sebenarnya operator sedang melakukan langkah
mengubah bukaan valve sesuai dengan hasil perbandingan dan perhitungan tadi.
Langkah inilah yang disebut dengan langkah mengoreksi.
Keempat langkah yang dilakukan operator tadi yaitu mengukur,
membandingkan, menghitung,dan mengoreksi, seluruhnya dapat dikerjakan dengan
langkah instrumentasi. Manusia, kemudian, sama sekali tidak menentukan keempat
langkah tadi. Operator hanya perlu menentukan besarnya set point dan semuanya akan dikerjakan secara otomatis oleh instrument. Sistem pengendalian secara inilah yang
disebut dengan sistem pengendalian otomatis (automatic control system). Keempat tahapan pengendaliannya, sepenuhnya dilakukan dengan instrument. Mata rantai
pengendaliannya kemudian disebut mata rantai tertutup, dan sistemnya juga disebut
sistem pengendalian tertutup atau sistem closed loop.
2.1.3 Pengelompokan Sistem Pengendalian
Sistem pengendalian dapat di kelompokkan menjadi 3 bagian yaitu:
1. Sistem Pengendalian Manual Dan Otomatis
Sistem pengendalian digolongkan kedalam dua kategori umum yaitu: sistem
manual dan otomatis. Perbedaan ini ditentukan oleh tindakan pengontrolan,
dimana besaran ini bertanggungjawab menggerakkan sistem untuk menghasilkan
outputnya. Pengendalian secara manual adalah pengendalian yang dilakukan oleh
manusia yang bertindak sebagai operator sedangkan pengontrolan secara otomatis
adalah pengontrolan yang dilakukan oleh mesin atau peralatan yang bekerja secara
otomatis dan operasinya dibawah pengwasan manusia. Pengendalian secara
manual banyak ditemukan dalam kehidupan sehari hari seperti penyetelan radio
dan televisi sedangkan secara otomatis didalam proses industri, pengendalian
pesawat dan pembangkit tenaga listrik.
Sistem loop terbuka (open loop) adalah sistem pengendalian yang keluarannya tidak berpengaruh pada aksi pengendalian. Jadi pada sistem pengendalian loop
terbuka, keluaran tidak diukur atau diumpan balikkan untuk dibandingkan dengan
masukan. Gambar 2.2 menunjukkan hubungan masukan keluaran untuk sistem
loop terbuka.
Masukan Keluaran
Control Plant
Gambar. 2.2 Sistem pengendalian loop terbuka
Ada dua keistimewaan dalam sistem loop terbuka ini adalah:
1. Ketelitian dari sistem loop terbuka tergantung pada kalibrasinya.
2. Sistem ini lebih stabil.
Sistem pengendalian loop tertutup adalah sistem pengendalian yang sinyal
keluarannya mempunyai pengaruh langsung pada aksi pengendalian. Jadi sistem
pengendalian tertutup adalah sistem pengendalian berumpan balik (feedback control). Sistem pengendalian loop tertutup menggunakan aksi umpan balik untuk memperkecil
kesalahan sistem.
Masukan Keluaran
Controller Plant
Elemen Ukur
Controller Plant
Gambar 2.3 Sistem pengendalian loop tertutup
Adapun keistimewaan dalam sistem pengendalian loop tertutup adalah:
a. Meningkatkan ketelitian dengan kemampuan untuk menghasilkan kembali
inputnya
b. Mengurangi akibat – akibat ketidaklinearan
3. Sistem Pengendalian Bertingkat (Cascade Control System)
Sistem pengendalian bertingkat adalah sistem pengendalian yang memiliki 2
besaran pengukuran yang berada dalam satu kontrol loop. Tujuan dari sistem
pengendalian bertingkat ini adalah untuk mendapatkan hasil pengaturan yang tepat
dengan mengurangi efek penundaan waktu yang terjadi. Hal ini dilakukan dengan
jalan menggunakan out put dari controller pertama (primary controller), sebagai besaran untuk mengatur set point bagi controller kedua (secondary controller).
Tower / Tangki
reboiler Feed Water
Bottom Product
TIC
FIC
Steam
Valve LIC
Gambar 2.4 Sistem Pengendalian Bertingkat
Perubahan perubahan dalam keadaan beroperasi membutuhkan pengaturan
pada panas yang menjadi input, jika diperlukan untuk mendeteksi suatu perubahan
yang cepat sebuah temperature kontrol dipasangkan pada titik yang paling optimum
dari tower. Output dari temperatur controller digunakan digunakan untuk mengatur set point dari steam flow controller. Jadi kecepatan aliran uap berubah dengan perubahan suhu dari tower. Jadi dalam hal ini temperatur kontrol merupakan primary controller dan steam flow merupakan secondary controller.
2.1.4 Mode Pengendalian Pada Industri
Pengendalian otomatis pada industry pada minyak bumi dan gas dapat diklasifikasikan
sesuai dengan aksi pengendalian dan factor keamanannya. Aksi pengendalian tersebut
sangat dipengaruhi oleh karakteristik proses seperti kepekaan, akurasi, respon, dan
stabilitasnya bila terjadi perubahan beban. Adapun beberapa mode pengendalian
Pada pengendalian dengan aksi pengendali proporsional plus integral
(PI),dapat didefinisikan dengan persamaan berikut :
m(t) = Kce(t) +
dimana Kc menyatakan penguatan proporsional(perubahan output yang
menyebabkan perubahan input) dan Ti menyatakan waktu integral. Baik Kc
maupun Ti dapat diatur. Waktu integral mengatur aksi pengendalian integral,
sedangkan perubahan nilai Kc akibat dari bagian aksi pengendalian
proporsional maupun integral. Ti menunjukkan berapa kali waktu reset atau
pengulangan tiap menit bagian proporsional diulang.
2. Pengendali Proporsional Ditambah Derivatif (PD)
Aksi pengendali proporsional ditambah derivatif dapat didefinisikan dengan
persamaan sebagai berikut :
m(t) = Kce(t) +
dengan laju aksi memberikan pengaruh pada aksi pengendali proporsional.
3. Pengendali Proporsional Ditambah Integral dan Derivatif (PID)
Alat pengendali PID sangat sering digunakan dalam pengendali industri. Jika
e(t) masukan ke alat pengendali PID, maka keluaran m(t) dari alat pengendali
ini diberikan sebagai berikut :
dimana Td menyatakan waktu turunan dan Ti menyatakan waktu integral.
2.2 Model Matematik Sistem Dinamik
Model matematik dari sistem dinamik didefinisikan sebagai sejumlah
persamaan yang menggambarkan dinamika dari sistem secara tepat. Langkah pertama
dalam analisis sistem dinamik adalah menurunkan model matematiknya. Menurunkan
model matematika yang adalah bagian yang paling penting dari analisis secara
keseluruhan.
Model matematika mungkin mengambil banyak bentuk yang berbeda beda
tergantung dari sistem tertentu, satu model matematika mungkin lebih cocok dari pada
model matematika yang lain. Pada umumnya, dalam menyelesaikan suatu persoalan,
pertama kali diinginkan untuk membuat model yang disederhanakan sedemikian rupa
sehingga diperoleh gambaran umum dari jawaban suatu persoalan. Dalam
menurunkan model yang disederhanakan tersebut, seringkali untuk mengabaikan sifat
fisis dari sistem. Terutama jika diinginkan model matematika linear parameter
terkumpul, yaitu suatu model yang menggunakan persamaan diffrensial biasa, maka
selalu diperlukan untuk mengabaikan ketidaklinearan dan parameter terdistribusi
(parameter yang berbentuk persamaan diffrensial parsial) yang munkin terdapat pada
sistem fisik yang ditinjau.
Sistem dikatakan linear jika berlangsung prinsip prinsip superposisi. Prinsip
super posisi menyatakan bahwa tanggapan yang dihasilkan dengan mengaplikasikan
dua fungsi gaya yang berbeda secara bersamaan adalah jumlah dari tanggapan
terhadap aplikasi fungsi tersebut secara sendiri sendiri. Jadi sistem linear, tanggapan
terhadap beberapa masukan dapat dihitung dengan mengerjakan masukan satu persatu
dan menjumlahkan hasilnya. Prosedur untuk menemukan penyelesaian masalah yang
melibatkan sistem non linear umumnya sangat rumit. Karena kesulitan matematika
yang ada pada sistem non linear. Maka perlu membuat sistem linear yang ekuivalen
yang berlaku untuk jangka operasi yang terbatas.
2.3 Model Matematik Sistem Fisik 2.3.1 Transformasi Laplace
suatu fungsi lain F (S), dimana S menyatakan suatu bidang kompleks yang dapat
dituliskan sebagai S = dimana (sigma) adalah bagian nyata, dan = bagian
khayal dari S; sedangkan . Metode transformasi laplace adalah suatu metode
yang dapat digunakan secara mudah untuk menyelesaikan persamaan diffrensial.
Dengan menggunakan transformasi laplace dapat diubah beberapa fungsi umum
seperti fungsi ekponensial dan fungsi sinusoidal teredam menjadi fungsi – fungsi
aljabar kompleks dalam wawasan “S”.
Untuk menggunakan transformasi laplace, sebuah fungsi harus nyata dan
kontinyu dalam suatu selang waktu yang akan dianalisis. Secara matematis bentuk
transformasi ini adalah :
F (S) =
= Simbol operasional yang menunjukkan bahwa besaran yang didahuluinya
ditransformasikan dengan integral laplace -st dt
F (s) = Transformasi laplace dari (t)
Proses kebalikan dari penemuan fungsi waktu dari transformasi laplace balik.
Notasi untuk transformasi laplace balik adalah L-1. Jadi
)
Dalam sistem pengendalian fungsi alih seringkali digunakan untuk mencirikan
hubungan masukan – keluaran dari sistekm linear parameter konstan. Konsep fungsi
alih hanya digunakan pada sistem linear parameter konstan, walaupun dapat diperluas
untuk sistem pengendalian non linear. Fungsi alih sistem linear parameter konstan
dan transpormasi laplace masukan (sistem penggerak), dengan anggapan bahwa
semua kondisi awal adalah nol.
Jika G(s) menyatakan fungsi alih dari sistem, dengan masukan X(t) dan
keluaran Y(t), sehingga dapat ditulis:
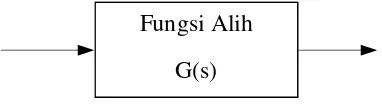
Fungsi Alih G(s) =
Dengan menggunakan fungsi alih dapat dinyatakan dengan sistem dinamik dengan
persamaan aljabar dalam S. Jika pangkat tertinggi dari S dalam penyebut fungsi alih
sama dengan “n”, maka sistem tersebut disebut orde ke-n.
2.3.3 Diagram Blok
Suatu sistem pengendalian terdiri dari beberapa komponen. Untuk
menunjukkan fungsi yang dilakukan oleh tiap komponen, dalam teknik pengendalian,
biasanya kita menggunakan suatu digram yang dinamakan dengan digram blok. Ini
digunakan untuk menyelesaikan permasalahan permasalahan dalam sistem
pengendalian yang telah diubah dalam bentuk yang mudah dianalisis.
Digram blok suatu sistem adalah suatu penyajian bergambar dari fungsi yang
dilakukan oleh tiap komponen dan aliran sinyalnya. Diagram semacam ini melukiskan
hubungan timbal balik yang ada antara berbagai komponen. Dalam suatu diagram
blok, semua variable saling dihubungkan dengan menggunakan blok fungsional. Blok
fungsional atau sering disebut dengan blok adalah suatu simbol operasi matematik
pada sinyal masukan blok yang menghasilkan keluaran. Fungsi alih dari komponen
biasanya ditulis didalam blok, yang dihubungkan dengan anak panah untuk
menunjukkan arah aliran sinyal. Jadi, diagram blok suatu sistem pengendalian secara
eksplisit menunjukkan suatu sifat searah.
Prosedur penggambaran diagram blok dapat dirincikan sebagai berikut :
1. Menulis persamaan yang menggambarkan perilaku dinamik tiap komponen.
3. Menyajikan masing masing persamaan dalam bentuk transformasi laplace
dalam suatu blok.
4. Merakit elemen elemen dalam digram blok yang lengkap.
Fungsi Alih Fungsi Alih
G(s)
Gambar 2.5 Diagram Blok
Gambar diatas menunjukan suatu elemen dari diagram blok. Anak panah yang
menuju ke blok menyatakan masukan dan anak panah yang meninggalkan blok
menyatakan suatu keluaran. Anak panah semacam ini dianggap sebagai sinyal.Harus
diperhatikan bahwa dalam suatu digram blok sumber energi utamanya tidak
ditunjukkan secara ekplisit, dan juga bahwa diagram blok suatu sistem adalah tidak
unik. Suatu sistem dapat digambarkan dengan beberapa diagram blok yang berbeda
tergantung pada analisis sistem tersebut. Diagram blok mengandung suatu informasi
perilaku dinamik, tetapi tidak mengandung suatu informasi mengenai kontruksi fisik
dari sistem.
R(s) E(s) C(s)
G(s)
Gambar 2.6 Diagram Blok Sistem pengendalian Loop Tertutup
Gambar 2.6 menunjukkan diagram blok sistem pengendalian loop tertutup. Keluaran
C(s) diumpan balikkan ke titik penjumlahan untuk dibandingkan dengan masukan
acuan R(s). Keluaran blok C(s) diperoleh dengan mengalikan fungsi aliih G(s) dengan
masukan blok E(s). Setiap sistem pengendalian dapat dinyatakan denggan dengan
suatu digram blok yang terdiri dari beberapa blok titik penjumlahan dan titik cabang.
Titik cabang adalah titik tempat sinyal keluaran blok secara bersamaan menuju ke
Jika keluaran diumpan balikkan ke titik penjumlahan atau dibandingkan
dengan masukan, maka perlu mengubah sinyal keluaran agar sama dengan bentuk
sinyal masukan. Pengubahan ini dilakukan oleh elemen umpan balik yang mempunyai
fungsi alih H(s).
G(s)
H(s)
R(s) C(s)
Gambar 2.7 Sistem pengendalian loop tertutup dengan umpan balik H(s)
Peranan lainnya dari sitem umpan balik adalah memodifikasi keluaran sebelum
dibandingkan dengan masukan. Dalam hal ini, sinyal umpan balik yang diumpankan
ke titik penjumlahan untuk dibandingkan dengan sinyal masukan dapat ditulis :
)
Keterangan: G(s) = Fungsi alih maju
H(s) = Fungsi alih umpan balik
C(s) = Sebagai keluaran pada proses
R(s) = Sebagai masukan (set point)
Tanda negatif (-) pada persamaan 2.7 digunakan untuk sistem umpan balik positif
sedangkan tanda positif (+) digunakan untuk sistem umpan balik negatif.
2.4 Analisis Kestabilan Sistem
Kestabilan suatu sistem ditentukan oleh tanggapannya terhadap masukan atau
gangguan. Suatu sistem dikatakan stabil bila sistem tersebut akan tetap dalam keadaan
point dari sistem sedangkan waktu (t) mewakili waktu pencapaian dari set point
tersebut. Ketidakstabilan merupakan suatu keadaan yang tidak menguntungkan bagi
suatu sistem pengendalian loop tertutup. Jelas untuk memperoleh nilai yang
memberikan manfaat praktis sebuah sistem pengendalian haruslah stabil. Untuk
menentukan apakah suatu sistem itu stabil atau tidak, terdapat berbagai macam cara
yang dapat digunakan.
2.4.1 Kriteria Kestabilan Routh
Penentuan kestabilan suatu sistem berdasarkan persamaan karakteristik akan
mengakibatkan kesulitan bagi persamaan yang tingkatannya (orde) yang lebih tinggi,
yaitu dalam menentukan akar akar persamaan karakteristik tersebut. Suatu cara lain
untuk menentukan kestabilan suatu sistem tanpa menghitung akar akar persamaan
karakteristiknya adalah dengan menggunakan kriteria Routh. Kriteria ini merupakan
aljabar untuk menentukan kestabilan dalam wawasan S (laplace). Cara ini yang
menunjukkan adanya akar akar yang tidak stabil beserta jumlahnya, tetapi tidak
menentukan nilai atau kemungkinan cara untuk mencegah kestabilan.
Prosedur dalam kriteria kestabilan Routh adalah sebagai berikut:
1. Ditulislah persamaan karakteristik sistem dalam bentuk polinomial yaitu:
0
dengan dst adalah koefisien dari persamaan tersebut.
2. Jika ada koefisien koefisien yang berharga nol atau negatif di mana paling
tidak terdapat satu koefisien yang berharga positif, maka terdapat satu atau
lebih akar khayal atau yang mempunyai bagian nyata positif. Oleh karena itu,
pada kasus ini, sistem tidak stabil. Jika kita hanya tertarik pada kestabilan
mutlak, maka tidak perlu mengikuti prosedur selanjutnya. Ingat bahwa semua
3. Jika semua koefiisien berharga positif, maka disusun persamaan dalam suatu
barisan (arrays) yang menyerupai sebuah matriks dengan bentuk sebagai
berikut:
Sn … …
Sn-1 … …
Sn-2 … …
Sn-3 … …
Sn-4 … …
… …
… …
S2 S1
S0
Dimana cara penyusunannya adalah sebagai berikut:
- Baris pertama adalah koefisien koefisien yang terdiri dari indeks genap
(0,2,4,6,…dst)
- Baris kedua adalah indeks – indeks yang terdiri dari bilangan ganjil
(1,3,5,7,…dst)
- Baris ketiga dinyatakan oleh b1 b2 b3 …,dimana harga harga b1 b2 b3
ditentukan dari harga harga baris pertama dan kedua.
- Baris keempat diberi notasi c1 c2 c3…,dst. Dan harga – harganya diperoleh
dari baris kedua dan baris ketiga.
- Demikianlah seterusnya
Jumlah barisan ini tergantung pada orde persamaan karakteristik tersebut.
1
Selanjutnya harga harga c1 c2 c3…dst ditentukan dengan cara yang sama yaitu:
1
Dan harga d1 ditentukan dengan cara yang sama yaitu :
1
Proses ini diteruskan sampai baris ke-n secara lengkap. Susunan yang lengkap
dari koefisien berbentuk segitiga (triangular), dimana jumlah baris adalah sebanyak
pangkat tertinggi dari S ditambah satu. Perlu diperhatikan bahwa didalam
menyusunnya suatu baris dapat dibagi atau dikalikan dengan suatu bilangan positif
untuk menyederhanakan perhitungan numeric berikutnya tanpa mengubah kesimpulan
kestabilan.
Kriteria kestabilan Routh menyatakan bahwa banyaknya akar akar dari
persamaan 2.15 yang mempunyai bagian nyata positif sama dengan banyaknya
perubahan tanda dari koefisien pada kolom pertama dari susunan tersebut. Harus
diperhatikan bahwa harga eksak dari suku suku pada kolom pertama tidak perlu
diketahui, tetapi yang perlu diperhatikan adalah tanda tandanya saja. Syarat perlu dan
cukup adalah semua koefisien dari persamaan 2.15 haruslah bertanda positif dan
2.4.2 Kriteria Kestabilan Hurwitz
Persyaratan kestabilan Hurwitz adalah salah satu cara untuk menentukan
apakah semua akar persamaan karakteristik memiliki bagian nyata yang negative atau
tidak. Persyaratan ini diterapkan dalam bentuk determinan yang merupakan koefisien
koefisien persamaan karakteristik tersebut. Dimisalkan bahkan koefisien yang pertama
positif. Determinan untuk I = 1,2,…,n -1 sebagai bentuk dari determinan minor
utama dari determinan. Persyaratan kestabilan Hurwitz merupakan sebuah cara untuk
menentukan kestabilan sistem yang diterapkan ke sebuah persamaan karakteristik orde
ke –n seperti dibawah ini:
0
... 0
1 1
1
S a S a a
S
a n n
n
n ……….(2.9)
Apabila persamaan diatas dimasukkan kedalam bentuk determinan akan diperoleh
sebagai berikut :
n-1 n-3 … 0 … 0
n n-2 … 0 … 0
A = n-1 n-3 ………. … 0
n n-2 ……… … 0
… ……… … 0
… ……….. …
Determinan determinan tersebut di bentuk sebagai berikut:
= an1 .an2 .an3an .an1 .an5an .a2 .an3an4 .a2 .an1
Dan seterusnya sampai ke
Semua akar persamaan cirri mempunyai bagian nyata negatif jika dan hanya > 0,
untuk I = 1,2,…,n. (Syahreza, Andi. 2010).
2.4.3 Uji Respon Kestabilan Sistem Pengendalian dengan Metoda Respon Frekuensi.
Selain dengan metoda Routh dan Hurwitz sistem pengendalian juga dapat
diannalisa dengan metoda respon frekuensi. Berdasarkan persamaan G(s) dari sistem
pengendalian yang telah kita dapatkan, kita dapat melalukan uji tingkat kestabilan
berdasarkan Kualitatif sistem. Melalui uji ini akan memberikan gambaran seberapa
stabilkah sistem pengendalian temperatur dan tekanan dalam menangani dinamisasi
proses. (Syahreza, Andi.2010)
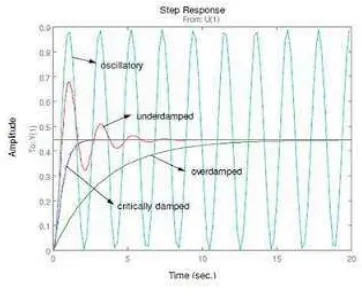
karakteristik respon waktu, karena pada dasarnya sistem kontrol memerlukan
waktu untuk mencapai kestabilan ketika dikenai perubahan input maupun gangguan.
Biasanya untuk memperoleh respon transient ini dengan menggunakan sinyal uji step,
yang memiliki karakteristik respon transien (karakteristik internal) maupun respon
keadaan tunak atau steady state (karakteristik eksternal). Respon dalam bentuk kurva
waktu dikelompokkan menjadi dua, yaitu stabil dan tidak stabil . Kelompok stabil
masih terbagi lagi menjadi tiga, yaitu overdamped, critically damped dan
underdamped. Kelompok tidak stabil juga terbagi menjadi 2, yaitu sustain oscillation
(a)
Maximum Overshoot (Mp) adalah nilai puncak kurva respon diukur dari
satuan. Apabila nilai akhir keadaan tunak responnya jauh dari satu, maka biasa
digunakan persen overshoot maksimum, dan didefinisikan oleh
Maksimum (persen) overshoot =
x 100%
Peak Time (tp) , waktu puncak adalah waktu yang diperlukan respon untuk
mencapai
puncak pertama overshoot. Kriteria 2 % atau 5 %
Rise Time (tr), waktu naik adalah waktu yang dibutuhkan oleh respon untuk
naik dari 5% ke 95% atau 10% ke 90% dari nilai steady state.
Error Steady State (Ess) adalah Besarnya kesalahan pada keadaan tunak .
Settling Time (ts), waktu tunak adalah waktu yang dibutuhkan respon untuk
mencapai keadaan stabil (keadaan tunak) atau dianggap stabil.
Delay Time (tp), waktu tunda adalah waktu yang diperlukan oleh respon untuk
mencapai setengah dari nilai steady state tunak untuk waktu pertama.
Sistem dikatakan stabil apabila respon sistem mendekati harga set-point, walaupun
diperlukan waktu untuk itu. Pada respon underdamped, respon melesat di atas harga
set-point kemudian berosilasi yang pada akhirnya tercapai kondisi steady state. Pada
respon overdamped, walaupun respon tidak pernah melesat di atas set-point
diperlukan waktu yang lebih lama untuk mencapai kondisi steady state. Sedangkan
pada respon critically damped, respon tidak pernah melesat di atas set-point dan dapat
mencapai kondisi steady state dalam waktu singkat. Tetapi hal ini tidak mencerminkan
respon critically damped lebih bagus dari overdamped atau underdamped.
Masing-masing respon tersebut mempunyai kelebihan dan kekurangan, dan juga tergantung
pada proses variabel yang dikendalikan. Ada proses variabel yang membutuhkan
respon sistem yang cepat, dan ada juga yang membutuhkan respon sistem yang
lambat.
Sistem dikatakan tidak stabil apabila respon sistem tidak pernah mencapai
harga set point. Pada respon sustain oscillation (oscillatory), respon sistem akan terus
berosilasi dengan amplitudo tetap. Sedangkan pada respon undamped, respon sistem
akan terus berosilasi dengan amplitudo yang semakin membesar. Pada sistem Control,
valve akan terus membuka dan menutup secara tidak beraturan yang akan merusak
sistem.
Melalui metoda analisis respons frekuensi kita dapat melihat nilai dari
overshoot sistem dan settling time (Ts) dari sistem tersebut. Berdasarkan persamaan model sistem kita dapat melakukan analisis respon frekuensi dengan menggunakan
simulink MatLAB. Dengan mengatur nilai propotional band,kita dapat melihat kestabilan dari sistem. Nilai propotional band dapat diatur dari 50 %,
100%,150%,200%,250% hingga 500 %. Berdasarkan propotional bandnya kita dapat
membuat diagram bloknya. ( Heni S. Jendra. 2010)
2.5 Hukum Termodinamika
Termodinamika adalah ilmu yang mempelajari banyak proses yang
bersangkutan dalam pembentukan suatu energi yang diubah menjadi yang lainnya.
Hukum termodinamika terbagi menjadi menjadi empat, yaitu:
a. Hukum nol atau dasar dari termodinamika yang diumumkan setelah hukum
pertama. “Yaitu jika dua tubuh berada dalam kesetimbangan panas dengan yang ketiga, tubuh-tubuh tersebut pasti dalam kesetimbangan panas antara
satu dengan yang lainnya”. Kesetimbangan dinyatakan dari situasi yang mana
suatu sistem yang tidak mengalami penyaringan pengisian dan tidak ada
penyaringan pengiriman panas di antara tubuh-tubuh itu.
b. Hukum pertama termodinamika menyatakan bahwa:
“Energi tidak dapat dimusnahkan atau diciptakan. Ketika energi terbentuk diubah menjadi yang lain, jumlah energi yang ada tetap konstan”. Contoh
hukum ini yaitu bensin. Energi kimia pada bahan bakar diubah menjadi
berbagai bentuk seperti energi kinetik, energi gerak, energi potensial dan air
dari alat pembuangan gas.
c. Hukum kedua termodinamika adalah hukum entropy yang mana dikatakan
bahwa:
pernah mencapai 100% efisien. Hukum kedua diumumkan bahwa ekonomi
material diperlukan dan tidak dapat dielakkan penurunan sumber daya yang
memungkinkannya. Entropy adalah sebuah pengukuran ketidakteraturan atau
chaos, ketika entropy bertambah kekacauan bertambah.
d. Hukum ketiga termodinamika adalah hukum tentang ketidakmampuan untuk
mencapai temperatur nol mutlak, yang mana dikatakan bahwa entropy dari
sebuah kristal ideal pada 0o K adalah nol. Kondisi itu tidak dapat dicapai
karena itu adalah temperatur terendah yang mungkin dapat eksis dan hanya
dapat didekati tetapi tidak benar-benar mencapai hukum ini tidak dibutuhkan
untuk kebanyakan kerja termodinamika, tetapi mengingat itu seperti efisiensi,
dari mesin ideal, mesin ideal, ada batas mutlak secara fisik.
Dalam proses pengendalian ini, hukum termodinamika berlaku. Hukum
termodinamika yang berhubungan sistem ini yaitu hukum termodinamika pertama dan
kedua. Yaitu untuk hukum termodinamika:
1. Dalam teknis panas, dikatakan bahwa panas bisa berubah menjadi usaha(energi
mekanis), usaha juga bisa berubah menjadi panas, jika sejumlah tertentu panas
hilang, maka sejumlah usaha yang menghilang, begitu sebaliknya. Ketika ada
sejumlah usaha yang hilang, maka pasti ada sejumlah panas yang
berhubungan.
2. Hukum ini menerangkan arah, keadaan dan keadaan konversi panas ke usaha.
Jika mesin pemanas bekerja,tidak hanya ada sumber panas untuk penyerapan,
tapi juga ada sumber dingin untuk pelepasan panas. Dalam konversi
panas-usaha, pasti ada bagian dari perpindahan panas yang berasal dari sumber panas
menuju sumber dingin, efisiensi mesin pemanas harus lebih kecil dari 100%.
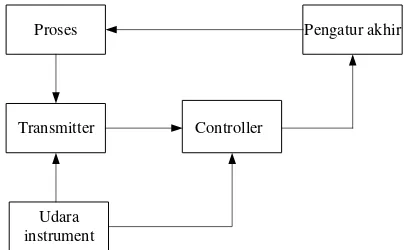
2.6 Thermal Deaerator
Deaerator adalah alat yang berfungsi untuk membuang gas-gas yang terkandung dalam
air umpan boiler, setelah melalui proses pemurnian air (watertreatment). Selain itu deaerator
juga berfungsi sebagai pemanas awal air pengisi ketelsebelum disalurkan ke dalam
boiler. Deaerator ini bekerja berdasarkan sifat dar ioksigen yang kelarutanya pada air akan
yang lebih kecil merupakantempat pemanasan pendahuluan yang berfungsi membuang
gas-gas dari bahan airketel sedangkan drum yang lebih besar merupakan tempat penampungan bahan
airketel yang jatuh dalam drum yang lebih kecil di atasnya. Pada drum yang lebih kecil
terdapat spray nozle yang berfungsi untuk menyemprotkan bahan air ketel
menjadibutiran-butiran halus agar proses pemanasan dan pembuangan gas-gas dari
bahan airketel lebih sempurna. Selain itu pada drum yang lebih kecil disediakan satu
saluranvent agar gas-gas dapat terbuang (bersama steam) ke atmosfir.Unsur utama dalam
menentukan keberhasilan dari proses ini adalah kontak fisik antara bahan air ketel dengan panas
yang diberikan oleh uap. Beberapa hal yang perlu diperhatikan dalam proses deaerator adalah :
a. Jumlah aliran air kondensat
b. Jumlah aliran bahan air ketel
c. Tekanan dalam deaerator
d. Level air dalam deaerator
e. Besarnya temperatur yang diberikan
Kelima faktor diatas adalah berhubungan erat satu sama lainnya. Jika salah satu
tidak bekerja dengan baik dapat berpengaruh jelek terhadap sistem air umpan,
sistemkondensat dan juga menaikan pemakaian bahan kimia yang lebih tinggi.
Sebelum terjadi proses pengolahan air pada Thermal Deaerator, ada beberapa tahap
proses yang dilakukan oleh unit utilities. Dalam hal ini ada beberapa unit yaitu:
a. Unit pengolahan air
Sumber air yang digunakan diambil dari sungai disekitar pabrik yang kemudian dialirkan
melalui pipa ke dalam kolam buatan yang berada di dekat Pabrik Murini Sam Sam I. Sebelum
digunakan, air tersebut diolah terlebih dahulu karena masih mengandung partikel – partikel,
lumpur dan kotoran lain.
Pengolahan diawali dengan memasukkan air ke premix tank kemudian ditambahkan
bahan – bahan kimia dan diaduk dngan menggunakan agitator (pengaduk). Bahan – bahan kimia
yang ditambahkan adalah:
3. Caustic soda (NaOH), sebagai pengatur pH.
4. Kalsium Hipoklorit atau klorin cair (O2), sebagai disinfektan
Selanjutnya air dialirkan ke clarifier dan diaduk dengan putaran rendah agar kotoran yang
terbawa mengendap oleh gaya gravitasi. Endapan lumpur akan di blow-down sedangkan air yang
over flow dialirkan ke clearwell. Dalam aliran clearwell ditambahkan larutan soda pH-nya netral.
Clearwell juga berfungsi sebagai tempat penampungan sementara sebelum air dimasukkan ke
sand filter(dengan cara dipompakan) yang merupakan penyaring dengan media pasir untuk
menghilangkan kotoran-kotoran yang tidak mengendap di clarifier.
Portable water storage tank yang menampung air untuk keperluan sehari - hari dipabrik
dan perumahan. Air ini ditambahkan klorin sebagai disinfeksi.
Filtered water storage tank yang menampung air untuk keperluan air hydrant, air
pendingin (cooling water) dan service water lainnya. Untuk menghilangkan klorin, bau
dan warnanya, maka air dimasukkan ke karbon filter yang berisi karbon aktif pH air ini
diharapkan berkisar 7 – 7.5.
b. Unit Demineralisasi
Air yang digunakan dalam proses produksi adalah air yang tidak mengandung mineral.
Kandungan mineral yang harus dihilangkan diantaranya adalah Ca2+, Na2+, HCO3, SO4 dan CT.
Air dari filtered water storage tank dimasukkan ke cation exchanger untuk
menghilangkan ion-ion negatif agar pH air berkisar antara 8,6 – 8,9.Daerasi dilakukan dengan
menambahkan NaOH (caustic soda). Untuk menyempurnakan Demineralisasi, amak digunakan
mixed bed polisher yang berisi resin yang menukar kation dan anion agar air yang keluar memiliki
pH 6,1-6,2 yang ditampung di demineralized water storage tank( ada dua buah) sebelum dialirkan
ke pembangkit steam.
Sebelum diumpan ke boiler air yang berasal dari demineralized storage tank harus diolah
dulu untuk menghilangkan gas – gasnya. Gas – gas yang dihilangkan adalah CO2 dan O2 yang
menyebabkan korosi. Untuk menghilangkan gas ini dilakukan dengan cara skripping
menggunakan steam bertekanan rendah dengan alat yang disebut deaerator ditambahkan dengan:
- Larutan amonia untuk meningkatkan pH air.
- Hideazin, untuk mengikat O2.
- Fosfat, untuk mencegah terbentuknya kerak.
Sehingg pH air berubah dari 6.1-6.2 (sebelum masuk Deaerator) menjadi 8.5-9.5( pH air keluar)
dan setelah keluar dari deaerator air tersebut akan diumpan ke boiler. (Hadi Cokro, 2009)
Adapun penyebab tingginya kadar oksigen di dalam air yaitu:
1. Semakin rendah suhu air, kandungan oksigen yang terkandung semakin besar.
2. Tekanan yang besar dapat memaksa lebih banyak molekul oksigen masuk ke
dalam
ruang di antara molekul air.
3. Kemurnian air juga mempengaruhi kelarutan oksigen. Air yang murni
memungkinkan
4.6.1 Data Teknis Deaerator
Karakteristik dari Deaerator yaitu:
Specification and type : 50
Design Pressure : 0.2 Mpa
Design Temperature : 300°C
Effective Volume of Water Tank : 25 m³
Total Weight : 7250 kg
Rated Output : 50 t/h
Production no. : 16605-347
Operation Pressure : 0.02 Mpa
Operation Temperature : 105°C
Operation Medium : Steam & Boiler
Testing Pressure : 0.3 Mpa
Manufacture date : 2006/02
Qingdao Changlong Power Equipment Co, LTD
The people’s Republic China
2.6.2. Jenis-jenis Deaerator
Adapun jenis deaerator yang sering dijumpai adalah :
1. Deaerator Tipe spray
Deaerator ini dipergunakan apabila air umpan perlu dipanaskan terlebih
dahuludengan menggunakan uap sebagai pemanas. Uap yang masuk ke dalam
gas-gasyang larut didalam air dipaksa keluar sehingga konsentrasi oksigen dalam air turun.
Mekanisme proses deaerasi pada deaerator spray dapat diterangkan secara
garisbesar yaitu sebagai berikut. Apabila uap masuk ke dalam deaerator maka
kontak antara uap dengan air yang masuk akan terjadi di zona deaerasi pertama.
Uaptersebut akan memecah air dan sekaligus menghilangkan oksigen yang
terkandung didalam air dan uap yang masuk ke dalam zona deaerasi kedua akan
menghilangkansisa-sisa oksigen.
Gambar 2.10. Deaerator Spray
2. Deaerator Vakum
Mekanisme kerja deaerator vakum dapat dijelaskan karena gas-gas yang
terlarut dalam air dihilangkan dengan menggunakan ejaktor uap atau dengan
pompa vakum, untuk memperoleh vakum yang diperlukan. Besarnya vakum tergantung
pada suhu air, akan tetapi biasanya 730 mm Hg. Sistem deaerasi dengan
menggunakan deaerator vakum dapat dikatakan tidak seefesien deaerator uap,
dan konsentrasi oksigen dalam air hanya dapat diturunkansampai kira-kira 0,2
ppm dan karbon dioksida berkisar antara 2-10 ppm. Tergantungkonsentrasi sebelum
Gambar 2.11. Deaerator Vacum
3. Deaerator Tipe Tray.
Pada deaerator tipe tray lebih memaksimalkan sekat-sekat (tray) sebagai media
untuk memperbesar ruang jatuh air sehingga molkul-molekul air salingberpisah
secara paksa satu dengan yang lainya, jadi tray pada deaerator tipe ini adalah untuk
memaksa molekul air untuk menyebar sehingga mempermudah pelepasan udara
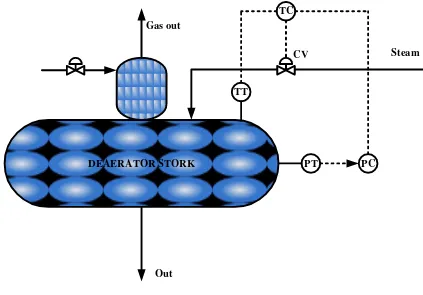
Untuk Deaerator yang dipakai dalam penelitian ini yaitu ini Deaerator terpadu
yaitu penggabungan antara tray dan spay dan tidak memiliki kepala. Cara kerja
Deaerator jenis ini yaitu ketika air masuk ke dalam deaerator, air akan mengalami 2
tahap deaerasni. Kondensasi utamanya diuraikan ke atom mejadi kecil dengan alat
semprotan khusus, dan kapasitas air ditentukan oleh jumlah lubang penyemprot air
yang dikontrol oleh per yang mengontrol muatan pada bagian atas. Oleh karena itu,
ukuran air yang menetes dan sudut semprotan tidak akan berubah bersama dengan
output deaerator. Tetesan air kecil ini melewati ruang uap(low pressure) di dearator
dengan kecepatan tinggi. Tekanan parsial gas pada uap kecil dan tetesan air kecil
melewati ruang uap bercampur dan bertukar panas penuh. Gas non kondensasi
dilepaskan ke udara. Inilah proses deaerasi awal. Pada saat air jatuh ke stork tank,
disini air akan mengalami deaerasi kedua. Pada saat di stork tank air akan
disemprotkan steam(high pressure) dari bagian bawah sehingga proses yang terjadi
seperti pada proses pemasakan air yaitu secara konveksi. Setelah disemprotkan steam
maka saat kondisi air telah mencapai level yang ditetapkan dan air mencapai
temperatur dan tekanan saturasi, maka gas tersebut akan dilepaskan ke udara dan air
keluar menuju boiler.
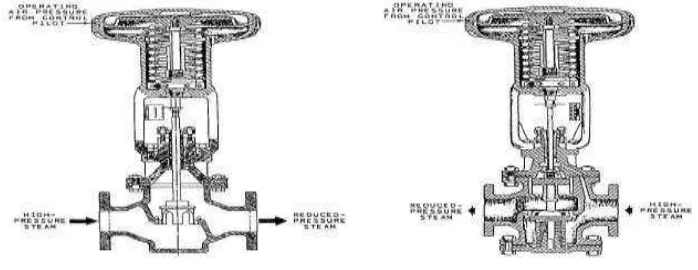
2.7 Control Valve
Pada umumnya kata valve sering kali diterjemahkan menjadi klep atau
biasa disebut dengan katup. Dalam sistem pengendalian otomatis control valve
merupakan salah satu jenis dari final control element yang paling umum dipakai
begitu juga dalam hal sistem pengendalian level permukaan air. Control valve
digunakan untuk mengatur banyaknya aliran feed water yang masuk dan keluar
melalui sebuah katup pengatur yang dapat dicontrol. Control valve bekerja hanya pada
dua posisi, yaitu tertutup penuh dan terbuka penuh. Pada pengendalian continue
dalam artian bekerja dalam pengendalian PI,PD,PID control valve tidak diharapkan
bekerja pada posisi tertutup penuh atau terbuka penuh ini dikarenakan control valve
harus selalu mengendalikan manipulated variable agar proses variable tetap sama
dengan set point.
Control valve terdiri dari dua bagian besar yaitu actuator dan valve. Actuator
prosses. Actuator dan valve harus melakukan koreksi berdasarkan sinyal manipulated
variable yang dikeluarkan dari control room. Dalam suatu prosses control loop control
valve merupakan final element control sedangkan dalam analisis perilaku dinamis dan
karakteristik control valve adalah suatu penentu kestabilan sistem.
Gambar 2.13 Control Valve
2.7.1 Actuator
Actuator memiliki pengentian sebagai penggerak , ini dikarenakan oleh fungsinya
yang menggerakkan control valve agar tetap teribuka atau tertutup dan selalu pada
posisi yang dikehendaki oleh controller. Pada dasarnya kerja dari sebuah actuator
sangant sederhana sekali. Bagian upper diaphragm case dan diaphragm dari sebuah
control valve berfungsi layaknya sebuah balon karet yang kuat sekali. Tekanan sinyal
pneumatic yang terakumulasi didalam ruang itu menimbulkan gaya yang bekerja
melawan pegas. Kalao gaya yang timbul karena tekanan sinyal pneumatic itu lebih
besar dari kekeuatan pegas, bagian stem akan terdorong kebawah. Gerak ini dapat
berfungsi sebagai gerak membuka dan menutup valve.
Karena kontruksinya, ada valve yang terbuka dengan turunnya stem dan ada
pula yang tertutup dengan turunnya stem. Pilihan kerja ini, pertama ditentukan oleh
kebutuhan mekanika fluida valve, apakah harus terbuka pada saat stem turun atau
pada saat stem naik. Kemudian ditentukan oleh kebutuhan kontruksi valve demi
kepentingan tekanan proses. Setelah ditentukan jenis valve baru ditenytukan jenis