RANCANGBANGUN SISTEM PENGENDALIAN TUAS
PENGENDALI IMPLEMEN UNTUK OTOMATISASI
TRAKTOR
GALIH BARMADI PUTRA
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Saya menyatakan dengan sebenarnya bahwa skripsi dengan judul Rancangbangun Sistem Pengendalian Tuas Pengendali Implemen untuk Otomatisasi Traktor adalah hasil karya saya sendiri dengan arahan Dosen pembimbing akademik, dan belum diajukan dalam bentuk apapun pada perguruan tinggi manapun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
ABSTRAK
GALIH BARMADI PUTRA. Rancangbangun Sistem Pengendalian Tuas Pengendali Implemen untuk Otomatisasi Traktor. Dibimbing oleh I DEWA MADE SUBRATA.
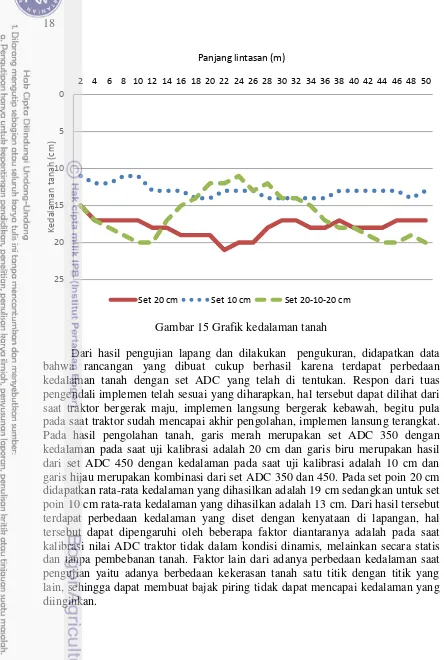
Pertanian moderen ditandai dengan penggunaan peralatan dan mesin untuk menggatikan tenaga manusia. Dalam proses persiapan lahan, penanaman, perawatan dan pemanenan yang menggunakan tenaga manusia digantikan dengan mesin-mesin pertanian. Penelitian ini memodifikasi tuas implemen yang akan dikendalikan secara otomatis. Rancangan yang digunakan yaitu dengan menggunakan transmisi rantai sproket dimana tuas pengendali implemen dihubungkan dengan rantai, kemudian rantai akan menarik tuas pengendali implemen tersebut. Transmisi rantai sproket ini digerakan oleh motor DC yang dikontrol dengan menggunakan mikrokontroler melalui perangkat H-Bridge dimana tuas pengendali implemen dapat dinaikan dan diturunkan dengan mengubah arah putaran dari motor DC. Potensiometer digunakan untuk mengetahui derajat putaran yang digunakan untuk mengetahui posisi dari tuas pengendali implemen. Perubahan hambatan pada potensiometer dikonversi menjadi data digital oleh mikrokontroler dan dijadikan sebagai feedback. Pada pengujian lapangan, digunakan implemen bajak piring, dan diukur kedalaman pengolahan tanahnya. Pada set ADC 350 rata-rata kedalaman tanah yang terolah adalah 19 cm sedangkan untuk set ADC 450 rata-rata kedalaman tanah yang terolah adalah 13 cm.
Kata kunci: rancangbangun, implemen, pengendalian, traktor otomatis
ABSTRACT
GALIH BARMADI PUTRA. Design of Implement Controlling System for Tractor Automation. Supervised by I DEWA MADE SUBRATA.
Modern farming is indicated by the use of agricultural tools and machines that substitute human labor. In the process of land preparation, planting, plant preservation, and harvesting, the use of human labor has been reduced and replaced by agricultural machines. The objective of this research was to modify the implement control system for automatic land plowing. The design was using a sprocket-chain mechanism that was connected to the control lever, there after the lever could be moved in back and forward directions. The sprocket was rotated by a DC motor that was controlled by a micro controller passing through H-Bridge device, thereby the lever could be ascend and descend easily by changing the direction of DC motor’s rotation. A potentiometer had been used to measure the rotation angle as the output of the lever position. The scale change at the potentiometer was converted to a digital data by the micro controller and would be used as a feedback. At the field performance test, the prototype was tested to control the depth of a disk plow in a tillage operation using a 4-wheel tractor. The test result showed that, the control system could control the plowing depth in the average of 19 cm at the 350 ADC setting, and 13 cm at 450 ADC setting.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknologi Pertanian
pada
Departemen Teknik Mesin dan Biosistem
RANCANGBANGUN SISTEM PENGENDALIAN TUAS
PENGENDALI IMPLEMEN UNTUK OTOMATISASI
TRAKTOR
GALIH BARMADI PUTRA
DEPARTEMEN TEKNIK MESIN DAN BIOSISTEM FAKULTAS TEKNOLOGI PERTANIAN
INSTITUT PERTANIAN BOGOR BOGOR
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga skripsi ini berhasil diselesaikan. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan Februari 2012 ini ialah Traktor Pintar dengan judul karya ilmiah “Rancangbangun Sistem Pengendalian Tuas Pengendali Implemen untuk Otomatisasi Traktor”.
Terima kasih penulis ucapkan kepada Bapak Dr Ir I Dewa Made Subrata, MAgr selaku pembimbing, terimakasih pula penulis ucapkan kepada Dr Ir Wawan Hermawan MS dan Dr Ir Gatot Pramuhadi MSi selaku dosen penguji skripsi. Di samping itu, penghargaan penulis sampaikan kepada Ka Cecep selaku rekan penelitian, serta Ita Hanani orang tersayang yang telah membantu selama pengumpulan data. Ungkapan terima kasih juga disampaikan kepada ayah, ibu, serta seluruh keluarga, atas segala doa dan kasih sayangnya, serta PLANKTON dan GPK selaku orang terdekat, serta teman-teman Teknik Mesin dan Biosistem angkatan 45 yang telah memberikan dukungan dan semangatnya.
Semoga skripsi ini bermanfaat. Aamiin.
DAFTAR ISI
DAFTAR GAMBAR x
DAFTAR LAMPIRAN x
PENDAHULUAN 1
Latar Belakang 1
Tujuan Penelitian 3
Ruang Lingkup Penelitian 3
METODE 4
Waktu dan Tempat 4
Bahan dan Alat 4
Tahapan Penelitian 5
Kriteria Perancangan 7
Rancangan Fungsional 7
Rancangan Struktural 8
HASIL DAN PEMBAHASAN 14
Prototipe Sistem Pengendali Tuas Implemen 14
Kinerja Sistem Pengendali Tuas Implemen 15
SIMPULAN DAN SARAN 19
Simpulan 19
Saran 19
DAFTAR TABEL
1 Kebutuhan tingkat akurasi data untuk pekerjaan traktor pintar pada
lahan pertanian 2
2 Uraian sub fungsi dan alternatif komponennya 7
DAFTAR GAMBAR
1 Prototipe traktor pintar yang menerapkan sistem pengendalian terpadu
(Scarlett 2001) 2
2 Diagram alir tahapan penelitian 6
3 Skema rangkaian elektronik sistem kontrol 9
4 Rangkaian elektronik sistem kontrol 9
5 Mekanisme unit pengontrol tuas pengendali implemen 10
6 Skema penentuan kebutuhan daya 11
7 Grafik pemilihan ukuran rantai 12
8 Prototipe mekanisme kontrol tuas pengendali implemen 14
9 Mekanisme kontrol tuas pengendali implemen 14
10Grafik kalibrasi tinggi lower link implemen 15
11Grafik validasi sistem kontrol tinggi lower link implemen pada uji
laboratorium 16
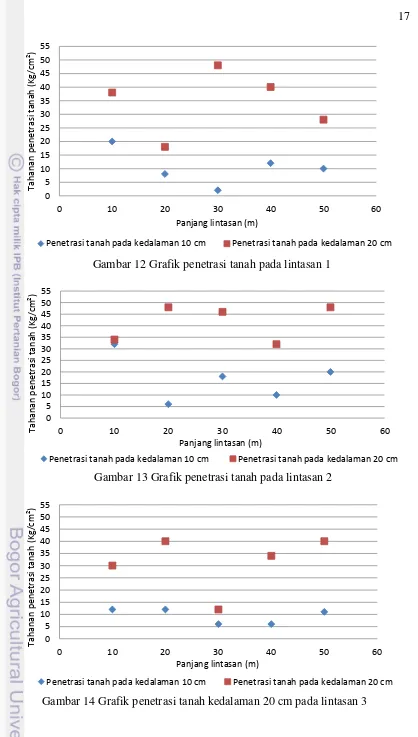
12Grafik penetrasi tanah pada lintasan 1 17
13Grafik penetrasi tanah pada lintasan 2 17
14Grafik penetrasi tanah pada lintasan 3 17
15Grafik kedalaman tanah 18
DAFTAR LAMPIRAN
1 EMS 30A H-Bridge 21
2 Gambar rancangan 22
3 Gambar hasil pengujian lapang 25
4 Tabel hasil pengukuran kedalaman pengolahan lahan menggunakan
PENDAHULUAN
Latar Belakang
Pertanian modern merupakan pertanian yang berbasis pada peningkatan efisiensi, produktivitas, dan juga konservasi sumberdaya. Efisisensi pada bidang pertanian terkait erat dengan penggunaan teknologi. Umumnya, semakin tinggi penggunaan teknologi maka efisiensi kerja semakin meningkat. Pertanian tradisional seperti yang telah berjalan pada tahun 70-an mengadopsi teknologi yang masih rendah, keadaan ini ditandai dengan penggunaan tenaga manusia yang masih dominan. Hal tersebut menyebabkan efisiensi di setiap bidang pekerjaan pertanian masih rendah dan berdampak pada produktivitas yang rendah pula. Pertanian modern ditandai dengan adanya penggunaan alat dan mesin pertanian yang menggantikan tenaga manusia. Pada proses pengolahan tanah, penanaman, pemeliharaan tanaman, dan pemanenan, penggunaan tenaga manusia sudah berkurang dan digantikan oleh mesin-mesin pertanian. Penggunaan alat dan mesin pertanian bertujuan untuk meningkatkan efisiensi dan kapasitas kerja serta produktivitas hasil. Selain itu ciri pertanian modern adalah adanya paradigma konservasi pada proses kerja. Pertanian konservasi merupakan aplikasi teknologi pertanian modern untuk meningkatkan produksi dan pada saat yang bersamaan melindungi dan meningkatkan sumberdaya lahan dimana produksi sangat tergantung kepadanya. Penerapan pertanian konservasi mempromosikan konsep optimasi panen dan keuntungan dengan menjamin penyediaan keuntungan dan jasa lingkungan lokal dan global.
Untuk mengatasi masalah tersebut, otomatisasi sistem pengendalian traktor merupakan salah satu solusinya dengan melakukan otomatisasi sistem pengendalian pada traktor, dapat mengurangi tenaga manusia yang mengalami kelelahan dan meningkatkan efisiensi dan produktivitas. Mayoritas operasi lahan pertanian dilakukan oleh traktor dengan kombinasi implemen atau aplikator yang sesuai dengan kebutuhan pengolahan lahan. Kualitas kerja dan output dari kombinasi traktor tersebut bergantung pada keterampilan dan konsentrasi kerja operator. Saat ini sistem elektronik untuk membantu meringankan kerja operator dan meningkatkan respon pada traktor telah banyak dikembangkan seperti misalnya perangkat elektronik pada mesin, transmisi, hidrolik dan pengendalian traksi pada traktor (Holtmann 1999). Namun, untuk mengoptimalkan kinerja serta efisiensi traktor diperlukan sebuah mekanisme untuk mengkoordinasikan semua kerja dari sistem kontrol secara presisi.
Konsep traktor pintar dirancang untuk menerapkan semua kontrol secara terintegrasi dengan seluruh sistem serta mengotomatisasi koordinasi antara traktor dan jenis spesifikasi pekerjaan untuk mencapai efisiensi operasi baik secara kinerja maupun nilai ekonomi serta mengurangi beban kerja dan kelelahan. Pada Gambar 1 ditunjukkan prototipe traktor pintar yang menerapkan sistem pengendalian terpadu menurut (Scarlett 2001) adalah sebagai berikut :
1. Traktor dilengkapi dengan kontrol berbasis mikroprosesor yang bertanggung jawab untuk setiap sub sistem seperti mesin, powershift, transmisi, elektro-hidrolik, traksi driveline dan lain sebagainnya.
2
3. Pusat unit kontrol dan antarmuka operator terletak di kabin kendaraan/traktor.
4. Antar-komunikasi/kontrol jaringan menghubungkan masing-masing sub-sistem ke unit kontrol pusat dan antarmuka operator.
Gambar 1 Prototipe traktor pintar yang menerapkan sistem pengendalian terpadu (Scarlett 2001)
Sedangkan kebutuhan tingkat akurasi data dari traktor pintar untuk digunakan pada kegiatan budidaya pertanian menurut (Auernhammer 2000) ditunjukkan pada tabel 1 berikut.
Tabel 1 Kebutuhan tingkat akurasi data untuk pekerjaan traktor pintar pada lahan pertanian
Tingkat Akurasi
Data Kebutuhan Operasi Contoh Pekerjaan
± 10 m Sistem navigasi Pembuatan peta lahan, pengelompokkan lahan ± 1 m Informasi untuk pengambilan
keputusan
3 dilakukan dengan menggunakan sebuah mikrokontroler tipe DT-AVR ATMega 8535 Bootloader Micro System yang dirangkai sedemikian rupa sehingga kontrol sistem sepenuhnya dilakukan secara otomatis tanpa operator yang mengendalikan sistem kontrolnya.
Implemen merupakan salah satu bagian dari traktor yang berperan penting dalam pengolahan lahan. Implemen digandengkan dengan traktor melalui titik gandeng, pengendalian tuas pengendali implemen secara otomatis merupakan salah satu hal yang utama dalam pembuatan Smart Tractor karena tuas pengendali implemen ini yang akan digunakan untuk mengatur naik turunnya implemen yang digunakan dalam pengolahan lahan. Pentingnya pengendalian tuas implemen secara otomatis yaitu untuk menunjang kinerja dari Smart Tractor tersebut, karena dengan tidak menggunakannya tenaga manusia dalam pengoperasian traktor maka perlu suatu sistem untuk menggerakan tuas implemen. Tuas pengendali implemen ini harus dikendalikan pada saat mobilisasi traktor ke lahan yang akan diolah serta pada saat pengolahan lahan. Pada saat pengolahan lahan tuas harus dikendalikan naik turun. Tuas pengendali implemen harus diturunkan pada saat pertama akan mengolah lahan, kemudian akan dinaikkan pada saat traktor akan belok atau pada saat akhir dari pengolahan lahan dan tuas pengendali implemen akan diturunkan kembali jika traktor sudah pada posisi untuk mengolah lajur berikutnya.
Tujuan Penelitian
Tujuan penelitian ini adalah merancangbangun dan menguji kinerja sistem pengendalian otomatis tuas pengendali implemen pada traktor roda empat.
Ruang Lingkup Penelitian
4
METODE
Waktu dan Tempat
Penelitian ini dilaksanakan di Laboratorium Instrumentasi dan Laboratorium Lapangan Siswadi Soepardjo Departemen Teknik Mesin dan Biosistem Fakultas Teknologi Pertanian Institut Pertanian Bogor. Waktu pelaksanaan dimulai dari bulan Maret sampai bulan Juni 2012.
Bahan dan Alat
Alat yang digunakan untuk membuat sistem pengendali adalah: 1. Timbangan gaya
Bahan yang digunakan untuk membuat sistem pengendali adalah:
1. Board DT-AVR Atmega 8535 Bootloader Micro sistem dan
Software yang digunakan untuk memprogram sistem pengendalinya adalah: 1. Microsoft Visual Basic 6.0
2. Code Vision AVR 3. AVR Bootloader V1.3
Perlengkapan yang digunakan pada saat pengambilan data adalah: 1. Patok
2. Tali rapia 3. Meteran
5 Tahapan Penelitian
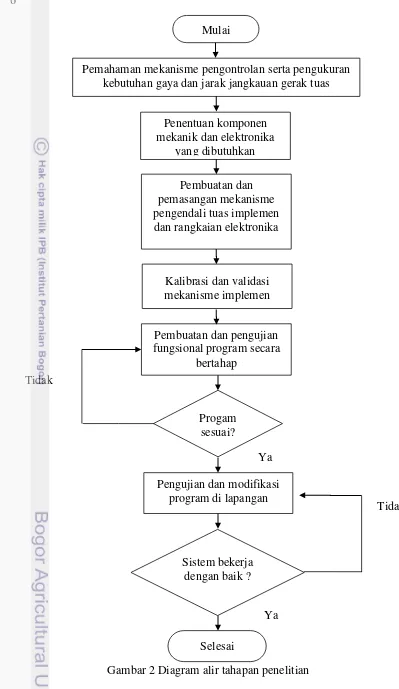
Penelitian ini dimulai dengan memahami rancangbangun secara mekanis yang dikendalikan pada penelitian ini. Setelah pemahaman terhadap mekanisme yang akan dikontrol, langkah selanjutnya adalah menentukan komponen elektronika yang dibutuhkan beserta propertinya dan merangkai komponen-komponen tersebut menjadi rangkaian pengendali yang direncanakan. Jika rangkaian sudah selesai dirancang, maka langkah selanjutnya adalah menyusun atau membuat program untuk mengontrol atau mengendalikan mekanisme sesuai dengan tujuan pengontrolan, mengukur dan mengkonversi besaran-besaran yang dibutuhkan dalam implementasi program, misalnya mengukur jarak displacement tuas implemen kemudian mengkonversi hasil pengukuran ke dalam besaran putaran potensiometer agar terbaca oleh mikrokontroler. Setelah itu adalah menguji hasil penelitian di lapangan beserta mencari data yang sudah direncanakan. Tahap awal dari penelitian ini adalah memahami mekaniseme pengontrolan yang akan diaplikasikan, yang dimulai memahami mekanisme kerja tuas implemen, memahami kebutuhan tenaga, kebutuhan energi listrik, kecepatan penggerak tuas, panjang lintasan dan spesifikasi lain dari komponen-komponen yang sudah terpasang. Pada tahap ini untuk mengetehui kebutuhan tenaga untuk menarik tuas pengendali implemen digunakan timbangan gaya dengan cara mengaitkan timbangan gaya kepada tuas pengendali implemen kemudian menariknya maka akan diketahui kebutuhan tenaga untuk menarik tuas pengendali implemen. Kebutuhan energi listrik perlu diketahui, hal ini bertujuan agar komponen yang berfungsi sebagai sumber tenaga (motor listrik DC) sesuai dengan kebutuhan tenaga yang memang dibutuhkan dan juga sumber listrik yang dibutuhkan dapat tersedia. Kemudian dilakukan pengukuran waktu untuk menggerakan tuas pengendali implemen dan panjang lintasan gerak dari tuas pengendali implemen, dari pengukuran tersebut maka akan diketauhui kebutuhan dari kecepatan putaran motor dan berapa putaran motor yang diperlukan untuk menggerakkan tuas pengendali implemen.
6
Gambar 2 Diagram alir tahapan penelitian
Pemahaman mekanisme pengontrolan serta pengukuran kebutuhan gaya dan jarak jangkauan gerak tuas
7 Kriteria Perancangan
Sistem pengendalian otomatis tuas implemen ini merupakan pengendalian tuas implemen secara otomatis menggunakan suatu unit pengotrol tuas pengendali implemen yang dikendalikan oleh mikrokontroler. Adapun kriteria-kriteria yang harus terpenuhi agar unit pengontrol tuas implemen tersebut dapat bekerja dengan baik, yaitu:
1. Dapat menggerakkan tuas implemen
2. Ukuran sistem penggerak yang disesuaikan dengan volume ruang yang tersedia
3. Sistem penggerak tidak merubah struktur dan fungsi dari traktor 4. Tuas implemen dapat dengan mudah digerakkan secara manual 5. Sederhana
Rancangan Fungsional
Berdasarkan kriteria rancangan, unit pengontrol tuas implemen tersebut harus berfungsi untuk menggerakkan tuas pengendali implemen ke arah depan dan belakang sesuai kebutuhan. Untuk mendukung fungsi utama tersebut maka dapat diuraikan beberapa sub fungsi seperti diperlihatkan pada Tabel 2.
Tabel 2 Uraian sub fungsi dan alternatif komponennya Sub fungsi Alternatif komponen,
mekanisme
Komponen, mekanisme terpilih Menggerakkan tuas kendali Rantai-sproket
Engkol-pendorong Memutar sproket Motor listrik DC
Motor hidrolik
Motor listrik DC Mengendalikan putaran motor Sistem kontrol
mikrokontroler Sistem kendali komputasi
Sistem kontrol mikrokontroler
Memberi informasi posisi tuas kendali
Potensiometer Sensor jarak
Potensiometer
8
bahan dari rangka penyangga dari sproket. Keseluruhan unit tersebut berfungsi untuk mengontrol tuas agar bergerak ke posisi implemen yang diperintahkan dengan kecepatan putar yang dapat diatur.
Rancangan Struktural
Rangkaian Sistem Kontrol
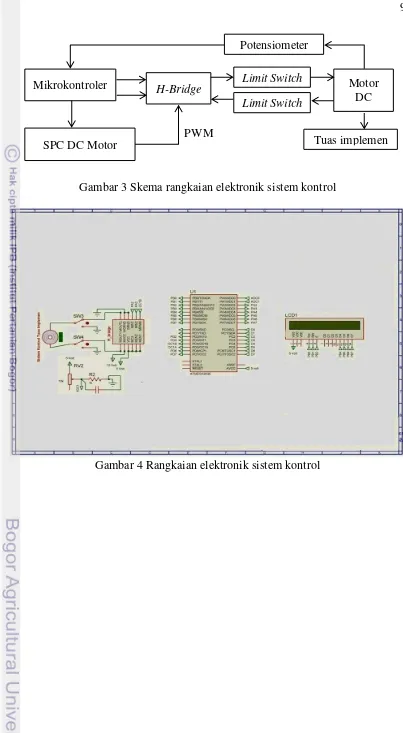
Setelah memahami tahap mekanisme pengontrolan, tahap selanjutnya adalah menentukan komponen elektronika yang dibutuhkan. Komponen elektronika tersebut ditentukan berdasarkan kesesuaian dan kebutuhan mekanisme dan sistem kerja yang dirancang. Adapun komponen elektronika yang dibutuhkan adalah sebagai berikut:
Komponen yang bertindak sebagai pengontrol : Mikrokontroler DT-AVR Atmega 8535
Komponen yang bertindak sebagai penggerak motor DC : H-Bridge
Komponen yang bertindak sebagai pembangkit pulsa PWM : SPC DC Motor Komponen yang bertindak untuk keperluan tampilan (interface) : LCD Komponen/sensor putaran: Potensiometer
Komponen pemutus arus: Limit Switch
Konektor untuk menghubungkan antar komponen Kabel untuk jalur arus listrik maupun jalur data
9
Gambar 3 Skema rangkaian elektronik sistem kontrol
Gambar 4 Rangkaian elektronik sistem kontrol Limit Switch
Motor DC Mikrokontroler
SPC DC Motor
Limit Switch H-Bridge
Potensiometer
PWM
10
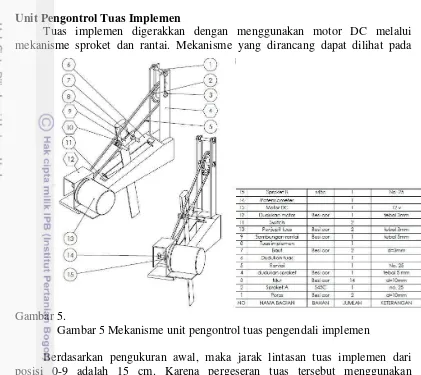
Unit Pengontrol Tuas Implemen
Tuas implemen digerakkan dengan menggunakan motor DC melalui mekanisme sproket dan rantai. Mekanisme yang dirancang dapat dilihat pada
Gambar 5.
Gambar 5 Mekanisme unit pengontrol tuas pengendali implemen
Berdasarkan pengukuran awal, maka jarak lintasan tuas implemen dari posisi 0-9 adalah 15 cm. Karena pergeseran tuas tersebut menggunakan mekanisme rantai-sproket dan dirancang jarak pergeseran tersebut dapat diselesaikan dalam satu putaran sproket, maka jari-jari sproket yang dibutuhkan dihitung sebagai berikut.
Y Ks
Keterangan : Ks adalah keliling sproket, rs adalah jari-jari sproket dan Y adalah panjang pergerakan tuas pengendali implemen
11
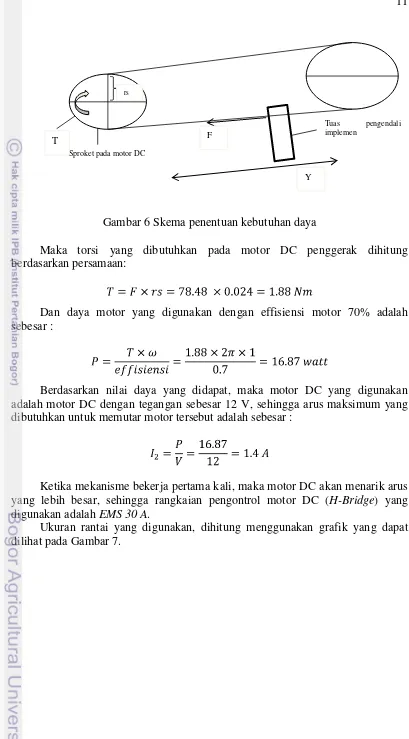
Gambar 6 Skema penentuan kebutuhan daya
Maka torsi yang dibutuhkan pada motor DC penggerak dihitung berdasarkan persamaan:
Dan daya motor yang digunakan dengan effisiensi motor 70% adalah sebesar :
Berdasarkan nilai daya yang didapat, maka motor DC yang digunakan adalah motor DC dengan tegangan sebesar 12 V, sehingga arus maksimum yang dibutuhkan untuk memutar motor tersebut adalah sebesar :
Ketika mekanisme bekerja pertama kali, maka motor DC akan menarik arus yang lebih besar, sehingga rangkaian pengontrol motor DC (H-Bridge) yang digunakan adalah EMS 30 A.
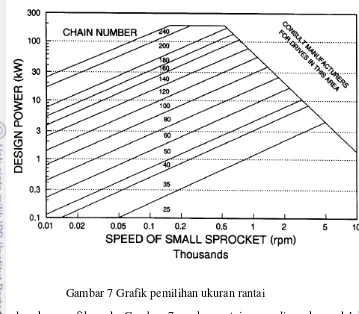
Ukuran rantai yang digunakan, dihitung menggunakan grafik yang dapat dilihat pada Gambar 7.
r
r
Sproket pada motor DC
Tuas pengendali implemen
T
rs
F
12
Gambar 7 Grafik pemilihan ukuran rantai
Berdasarkan grafik pada Gambar 7, maka rantai yang digunakan adalah rantai dengan no. 25, yang memiliki spesifikasi jarak bagi 6.35 mm, rol rantai dengan diameter 3.3 mm dan lebar 3.18 mm, plat mata rantai dengan tebal 0.76, diameter pena 2.3 mm.
Kalibrasi dan Validasi Mekanisme Tuas Implemen
Setelah rancangan struktural dan rangkaian elektronika terpasang sesuai dengan fungsinya, maka langkah selanjutnya adalah mengukur dan mengkonversi (mengkalibrasi) besaran yang dibutuhkan. Besaran-besaran yang akan dikonversi adalah nilai digital yang dihasilkan dari pembacaan potensiometer menjadi nilai tinggi lower link tempat dudukan implemen.
Uji kalibrasi pada sistem pengendalian tuas implemen dilakukan dengan membaca nilai keluaran ADC terhadap posisi tuas implemen. Nilai-nilai tersebut kemudian dijadikan patokan untuk menentukan nilai ADC yang tepat pada setiap posisi tuas hidrolik. Uji validasi sistem pengendalian tuas implemen dilakukan dengan cara tuas pengendali implemen digerakkan ke posisi tertentu kemudian akan dilihat posisi yang dihasilkan oleh sistem.
Pembangunan dan Implementasi Program Secara Bertahap
13 tidak sesuai dengan keinginan setelah diimplementasikan terhadap sistem. Program dibuat dengan menggunakan bahasa C, dan software yang digunakan adalah Code Vision AVR. Pemilihan bahasa C didasarkan oleh beberapa keunggulan yang dimiliki antara lain : bahasa C merupakan bahasa pemrograman tingkat tinggi, yang memudahkan desainer dan merupakan bahasa yang powerfull, fleksibel, dan portable sehingga dapat dijalankan pada beberapa sistem operasi yang berbeda (Joni & Raharjo 2006). Program yang ditulis dengan menggunakan aplikasi Code Vision AVR, yang kemudian dicompile menjadi file yang dapat didownload kedalam chip mikrokontroler.
Pengujian dan Modifikasi Program di Lapangan
Program – program yang telah dibuat di laboratorium dan sesuai dengan yang diharapkan belum tentu berjalan pada kondisi nyata di lapangan, oleh karena itu perlu pengujian di lapangan. Jika pengujian di lapangan sudah sesuai dengan tujuan pengendalian maka penelitian dianggap selesai, tapi jika terdapat kesalahan program, maka langkah selanjutnya harus diulangi kembali. Tahap terakhir dari penelitian ini adalah pengambilan data. Proses pengujian lapangan dilakukan untuk mengetahui apakah hasil rancangan yang telah diuji sebelumnya akan sesuai dengan yang diharapkan di lapangan. Dengan dilakukannya pengujian lapang maka akan diketahui rancangan tersebut telah sesuai dengan yang diinginkan atau belum.Adapun data-data yang diambil adalah data ketelitian sistem dan data kalibrasi besaran-besaran yang terlibat pada sistem tersebut, data validasi, data penetrasi tanah serta data pengujian langsung di lapangan.
Pada pengujian lapangan, panjang lintasan yang akan diolah untuk menguji adalah 50 m. Kecepatan putaran mesin traktor adalah 2000 rpm dengan set tuas perseneling 2 – 1. Sebelum dilakukan pembajakan, dilakukan pengukuran tahanan penetrasi tanah pada setiap 10 m di lintasan yang akan dibajak. Pengukuran tahana penetrasi dilakukan pada kedalaman 0-5, 5-10, 10-15, 15-20, dan 20-25 cm.
14
HASIL DAN PEMBAHASAN
Prototipe Sistem Pengendali Tuas Implemen
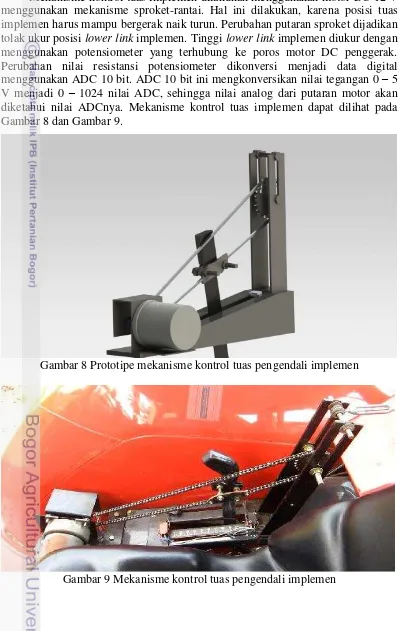
Mekanisme kontrol tuas implemen dilakukan menggunakan motor DC 12 V menggunakan mekanisme sproket-rantai. Hal ini dilakukan, karena posisi tuas implemen harus mampu bergerak naik turun. Perubahan putaran sproket dijadikan tolak ukur posisi lower link implemen. Tinggi lower link implemen diukur dengan menggunakan potensiometer yang terhubung ke poros motor DC penggerak. Perubahan nilai resistansi potensiometer dikonversi menjadi data digital menggunakan ADC 10 bit. ADC 10 bit ini mengkonversikan nilai tegangan 0 – 5 V menjadi 0 – 1024 nilai ADC, sehingga nilai analog dari putaran motor akan diketahui nilai ADCnya. Mekanisme kontrol tuas implemen dapat dilihat pada Gambar 8 dan Gambar 9.
Gambar 8 Prototipe mekanisme kontrol tuas pengendali implemen
15 Kinerja Sistem Pengendali Tuas Implemen
Hasil Kalibrasi
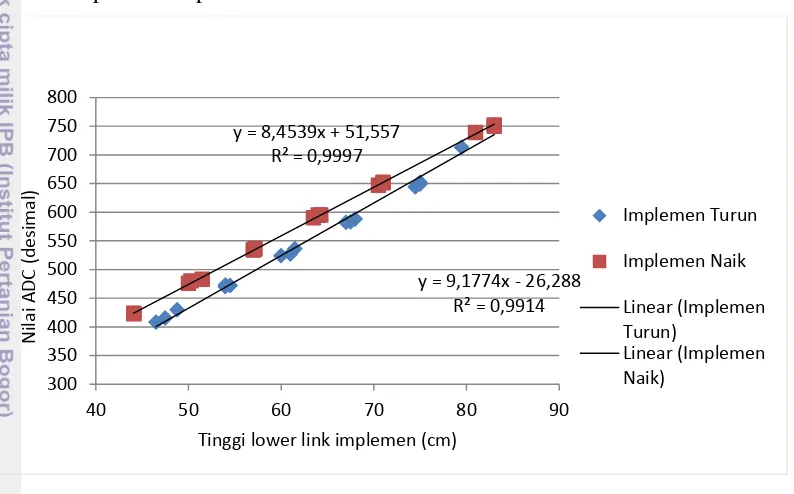
Proses kalibrasi dilakukan dengan melakukan pembacaan nilai ADC pada setiap posisi tuas yang mengindikasikan tinggi lower link implemen, nilai-nilai yang dihasilkan digunakan untuk membuat persamaan konversi dari tinggi lower link implement menjadi nilai ADC yang harus diinputkan ke mikrokontroler. Hasil kalibrasi menunjukkan bahwa perubahan nilai ADC bersifat linier terhadap perubahan tinggi lower link implemen. Terdapat perbedaan nilai ADC yang terbaca pada saat implemen naik jika dibandingkan dengan saat implemen turun. Hal ini dapat dilihat pada Gambar 10.
Gambar 10 Grafik kalibrasi tinggi lower link implemen Validasi
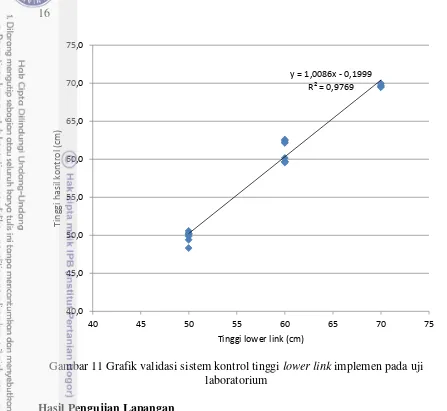
Uji validasi juga dilakukan untuk mengetahui besarnya error yang dihasilkan sistem kontrol terhadap set poin yang diharapkan. Berdasarkan hasil pengujian, rata-rata error yang dihasilkan adalah sebesar 0.97 cm. Hal ini juga dikarenakan motor masih bergerak meski arus sudah tidak mengalir dikarenakan adanya momen inersia. Hasil uji validasi dapat dilihat pada Gambar 11.
y = 9,1774x - 26,288
Tinggi lower link implemen (cm)
16
Gambar 11 Grafik validasi sistem kontrol tinggi lower link implemen pada uji laboratorium
Hasil Pengujian Lapangan
17
Gambar 12 Grafik penetrasi tanah pada lintasan 1
Gambar 13 Grafik penetrasi tanah pada lintasan 2
Gambar 14 Grafik penetrasi tanah kedalaman 20 cm pada lintasan 3
0
Penetrasi tanah pada kedalaman 10 cm Penetrasi tanah pada kedalaman 20 cm
0
Penetrasi tanah pada kedalaman 10 cm Penetrasi tanah pada kedalaman 20 cm
0
18
Gambar 15 Grafik kedalaman tanah
19
SIMPULAN DAN SARAN
Simpulan
Rancangan mekanik dan elektronik sistem pengendalian tuas pengendali implemen telah berhasil dibuat. Sistem pengendali tuas implemen dapat menggerakkan tuas pengendali implemen naik dan turun dengan menggunakan rantai yang digerakkan dengan menggunakan motor DC. Pengujian lapang yang telah dilakukan pada jalur set point lurus dengan jarak 50 m, menunjukan bahwa ada perbedaan kedalaman pada set poin 20 cm dan 10 cm.
Saran
20
DAFTAR PUSTAKA
Rahman CS. 2012. Rancangbangun Sistem Kemudi Otomatis Traktor Pertanian Berbasis Navigasi GPS (Global Positioning System). Bogor (ID): Pertanian Bogor Univ Pr.
Joni IM, Raharjo B. 2006. Pemrograman C dan Implementasinya. Bandung (ID): Informatika.
Holtmann W. 1999. Same SDS sequential drive system : one button-eight operations. Profi Int 99:10,46–48.
Scarlett AJ. 2001. Integrated Control Of Agricultural Tractors And Implements: a Review of Potential Opportunities Relating to Cultivation And Crop Establishment Machinery. Computers and Electronics in Agriculture Elsevier Science B.V. 72 (2010) 107-118. 30 (2001) 167–191.
21 Lampiran 1 EMS 30A H-Bridge
Dimensi : 7.4 cm (p) x 6.1 cm (l) x 1.9 cm (t).
Spesifikasi :
- Terdiri dari 1 driver full H-Bridge. (IC VNH2SP30 memiliki fitur current sense).
- Driver mampu melewatkan arus kontinu 30 A dan mendukung tegangan beban dari 5,5 V sampai 36 V (IC VNH2SP30 hanya sampai 16V).
- Input kompatibel dengan level tegangan TTL dan CMOS. - Output tri-state.
- MOSFET output dengan resistansi drain-source rendah (typ. 0,034 ohm). - Mendukung kontrol PWM dengan frekuensi sampai 20 Khz.
- Fault detection.
- Proteksi hubungan singkat dan proteksi overtemperature. - Undervoltageand overvoltage shutdown.
- Reverse battery protection.
- Jalur catu daya input (logika) terpisah dari jalur catu daya untuk beban. - Desain PCB standar industri dengan bahan 2 layer FR4 dan plated through
hole (PTH).
22
29 Lampiran 3 Gambar hasil pengujian lapang
a. Titik akhir dari pengolahan b. Pengolahan pada lintasan
30
31