DAFTAR PUSTAKA
Data sheet Mikrokontroler ATMega 8535 Data sheet Ultrasonik SRF04
Syahrul. 2012. Mikrokontroler AVR ATMEGA 8535. Jakarta : Informatika.
Nurcahyo, Sidik. 2005.Pemrograman AVR Atmel.Yogyakarta: Andi Publisher.
BAB III
PERANCANGAN SISTEM
3.1 Diagram Blok
Gambar 3.1 Diagram Blok Rangkaian
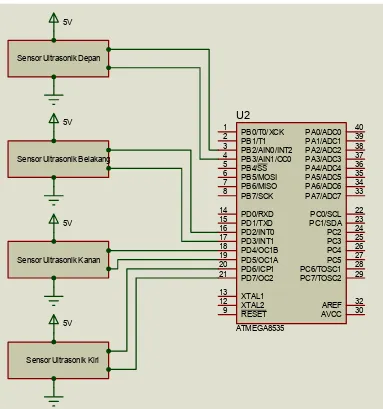
Berdasarkan diagram blok diatas, sistem menggunakan sensor ultrasonik SRF04, Photo transistor, LM35, RFID sebagai input (masukan). Pada sistem perancangan ini mengunakan sensor SRF04 sebanyak 4 buah,yang diletakkan pada depan, belakang, dan sisi kiri dan kanan pada kendaraan. Adapun sistem keamanan pengunci kendaraan menggunakan RFID. Pada sistem ini SRF04 berfungsi sebagai
SRF 04 Depan
SRF 04 Belakang
SRF 04 Kiri
SRF 04 Kanan
ATMEGA 8535
Buzzer
Solenoid (Rem) LCD Display
sensor jarak, Photo transistor berfungsi untuk mengukur kecepatan, LM35 berfungsi untuk mengukur suhu mesin pada kendaraan. Output (keluaran) pada sistem ini adalah berupa Buzzer (alarm) dan rem. Pada saat kecepatan, jarak dan suhu mesin pada kendaraan melewati ambang batas maka Buzzer akan bunyi sebagai tanda peringatan akan adanya bahaya. LCD berfungsi untuk menampilkan sistem keamanan terkunci atau tidak, dan juga menampilkan jarak,kecepatan, dan suhu mesin yang telah terukur. Untuk sensor SRF04 yang terletak di depan dan belakang pada kendaraan akan otomatis berhenti hal ini dikarenakan sensor SRF04 yang terletak pada depan dan belakang kendaraan mengirimkan perintah ke Mikrokontroler agar berhenti. Maka dari itu pada saat jarak dan kecepatan yang melebihi ambang batas normal,setelah bunyi buzzer (alarm) maka kendaraan akan otomatis berhenti.
3.2 Perancangan Pengendali Sistem
Rancangan sistem rangkaian terdiri dari mikrokontroler, sensor, LCD display,dll. Komponen – komponen tersebut memiliki fungsi yang berbeda-beda. Dalam rancangan ini, prinsip kerja masing – masing komponen dapat dijabarkan sebagai berikut :
3.2.1 Sensor Ultrasonik SRF04
Gambar 3.2 Rangkaian Sensor Ultrasonik SRF04
3.2.2 Mikrokontroler
Mikrokontroler yang digunakan dalam rancangan ini adalah Tipe ATMega 8535, yaitu mikrokontroler tipe AVR. Mikrokontroler berfungsi mengendalikan sistem berdasarkan input yang diterima dari sensor ultrasonic SRF04, Photo transistor, dan LM35. Dari input sensor tersebut mikrokontroler mengontrol jarak, kecepatan, dan suhu mesin pada kendaraan. Jika jarak, kecepatan, dan suhu mesin
pada kendaraan telah melewati batas ambang (batas tidak aman) mikrokontroler akan mengirimkan perintah kepada buzzer (alarm) yang akan memberikan peringatan berupa suara dan rem agar kendaraan berhenti dengan otomatis.
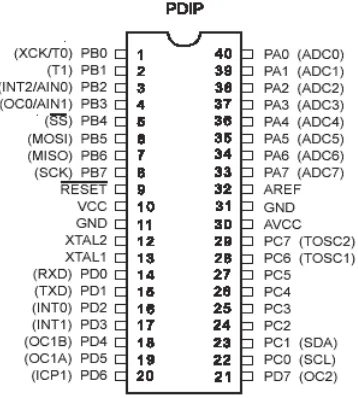
Gambar 3.3 Konfigurasi Pin ATMega 8535
3.2.3 LM 35
Gambar 3.4 Rangkaian LM35
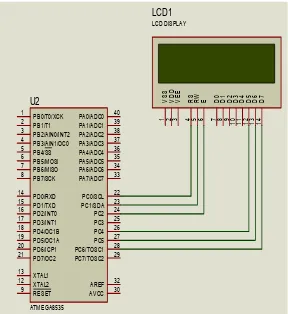
3.2.4 LCD (Liquid Crystal Display)
Gambar 3.6 Flowchart
berhenti. Kemudian sistem juga membaca suhu mesin pada kendaraan, apabila suhu mesin berada pada nilai yang diambang batas (pada sistem ini nilai ambang batas dari suhu mesin adalah >800C) maka mikrokontroler akan mengirimkan perintah untuk mengaktifkan buzzer sebagai tanda peringatan adanya bahaya. Jarak dan suhu mesin yang terukur akan ditampilkan pada LCD Kemudian sensor photo transistor akan membaca kecepatan kendaraan apabila kecepatan kendaraan melebihi batas maksimum maka mikrokontroler akan akan memberikan perintah pada buzzer untuk diaktifkan ,maka pada LCD akan muncul pesan peringatan dan mikrokontroler akan memerintahkan agar kendaraan dihentikan.
3.4 Perancangan Algoritma Program
Perancangan Software adalah proses perancangan untuk pembuatan program yang nantinya akan dijalankan oleh Mikrokontroler. Sebuah mikrokontroler tidak akan bekerja sebelum diberikan program.
3.5 Rancangan Program
Berikut ini adalah rancangan program sistem keamanan kendaraan yang ditulis dengan bahasa pemrograman C. Perintah - perintah program dapat dijelaskan sebagai berikut :
1. #include <delay.h> #include <alcd.h> #include <stdio.h>
Merupakan perintah untuk deklarasi rutin yang digunakan sesuai dengan nama rutin tersebut.
3. unsigned int t,H,B,s; char RFID[16],ID,v,i;
Merupakan perintah untuk medeklarasikan variabel–variabel yang digunakan. 4. PORTA=0x80;
DDRA=0x40;
PORTB=0x48; DDRB=0xF7;
PORTC=0x00; DDRC=0x00;
PORTD=0xA3; DDRD=0x5C;
Merupakan perintah untuk menginisialisasi PORT, yaitu PORT A, B, C, dan D serta nilai awal dari port tersebut.
5. lcd_init(16); lcd_gotoxy(0,0);
lcd_putsf("SISTEM PENGAMAN"); lcd_gotoxy(0,1);
lcd_putsf(" BERKENDARAAN");
Start1:
delay_ms(1000); lcd_clear();
6. lcd_putsf("SISTEM PENGAMAN"); lcd_gotoxy(0,1);
lcd_putsf(" TERKUNCI");
Merupakan perintah yang menamplkan bahwa sistem keamanan dalam keadaan terkunci yang ditampilkan pada layar LCD.
7. Read_PingF(); Read_PingB(); Read_PingL(); Read_PingR();
Merupakan perintah untuk membaca sensor ping yang berada di depan, belakang, kiri, dan kanan pada kendaraan.
8.s = read_adc(1); lcd_gotoxy(0,0);
lcd_putsf("SPEED : Km/J"); lcd_gotoxy(8,0);
if (s >800){for (i=0;i<3;i++){PORTB.1 = 1; delay_ms(50);PORTB.1 = 0;delay_ms(50);}}
Merupakan perintah untuk mengukur kecepatan pada kendaraan yang akan ditampilkan pada LCD dan mengaktifkan buzzer.
9. lcd_gotoxy(0,1);
lcd_putsf("Suhu mesin: "); lcd_gotoxy(11,1);
delay_ms(1000);
if (t >810){for (i=0;i<3;i++){PORTB.1 = 1; delay_ms(50);PORTB.1 = 0;delay_ms(50);}}
10. lcd_gotoxy(0,0);
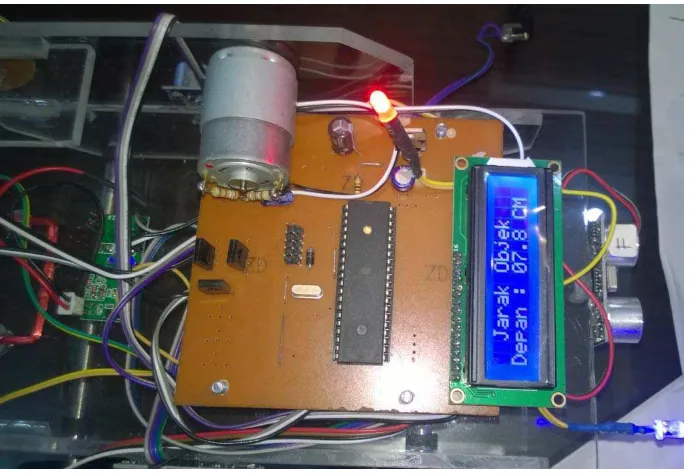
lcd_putsf(" Jarak Objek "); lcd_gotoxy(8,1);
Merupakan perintah untuk membaca jarak objek pada sensor ping, nilai yang terukur akan ditampilkan pada LCD.
11. lcd_gotoxy(0,1);
lcd_putsf("Depan : CM"); Display();
if (H<100){PORTB.0 = 0;PORTB.7 = 0;PORTD.2 = 1;} Merupakan perintah yang menampilkan jarak pada sensor ultrasonik depan, dan mengaktifkan pengereman.
12. lcd_gotoxy(0,1);
lcd_putsf(" Back: CM"); Display();}
if (H<100){PORTB.0 = 0;PORTB.7 = 0;PORTD.2 = 1;} Merupakan perintah yang menampilkan jarak pada sensor ultrasonik bagian belakang.
13. if (H<140){Sound(); lcd_gotoxy(0,1);
lcd_putsf("Kanan: CM"); Display();}
14. if (H<140){Sound(); lcd_gotoxy(0,1);
lcd_putsf("Kiri : CM"); Display();}
BAB IV
DATA DAN ANALISA DATA
4.1. Pengambilan Data
Berikut merupakan beberapa data yang perlu diambil :
4.1.1 Pengambilan Data Test Point Rangkaian Mikrokontroler ATMega 8535
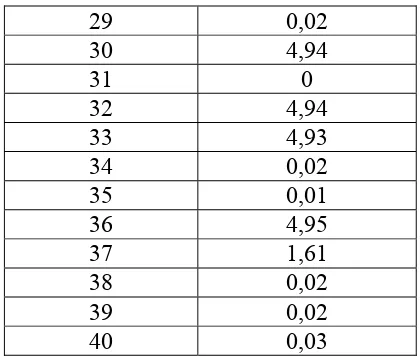
Tabel 4.1 Data Test Point Rangkaian Mikrokontroler ATMega 8535
29 0,02 30 4,94 31 0 32 4,94 33 4,93 34 0,02 35 0,01 36 4,95 37 1,61 38 0,02 39 0,02 40 0,03
Dari data test point di atas dapat kita simpulkan bahwa mikrokontroler bekerja dengan baik, misalnya pada pin 10 berfungsi sebagai Vcc dengan tegangan 5V dan untuk pin 11 berfungsi sebagai ground dengan tegangan 0V.
4.1.2 Pengambilan Data Test Point Rangkaian Regulator LM7805
Tabel 4.2 Data test point rangkaian catu daya
Input Output Ground
12,03 5,01 0
4.1.3 Pengambilan Data Test Point Rangkaian LCD
Tabel 4.3 Data test point rangkaian LCD
Pin Tegangan (V)
4.1.4 Pengambilan Data Pengamatan RFID
Tabel 4.4 Data Keluaran RFID
Nilai Tegangan Pada Saat Sistem Pengaman Terkunci (V)
Nilai Tegangan Pada Saat Sistem Non Aktif (V)
Pada saat sistem terkunci, RFID belum bekerja, oleh karena itu tegangan yang terukur sebesar 0 V. Sistem non aktif adalah pada saat RFID sudah digunakan, dan tegangan yang terukur adalah sebesar 4,98 V.
Tabel 4.5 Data Keluaran Sensor SRF04 Depan
No Kecepatan Jarak Waktu Respon
Solenoid (Detik)
Tegangan (V)
1 30 Km / Jam 3 cm 1 4,94
2 40 Km / Jam 5 cm 1 4,90
3 50 Km / Jam 7 cm 1,2 4,92
4 80 Km / Jam 10 cm 1,3 4,94
Tabel 4.6 Data Keluaran Sensor SRF04 Belakang
No Kecepatan Jarak Waktu Respon
Solenoid (Detik)
Tegangan (V)
1 30 Km / Jam 3 cm 1,1 4,94
2 40 Km / Jam 5 cm 1,3 4,90
3 50 Km / Jam 7 cm 1,4 4,92
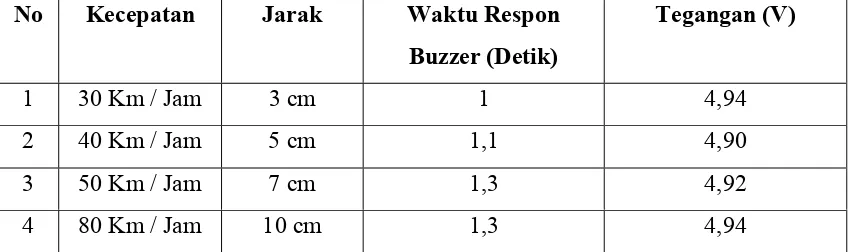
Tabel 4.7 Data Keluaran Sensor Samping Kanan
Tabel 4.8 Data Keluaran Sensor SRF04 Samping Kiri
No Kecepatan Jarak Waktu Respon
Buzzer (Detik)
Dari data yang diperoleh, dapat dilihat bahwa sensor ultrasonik SRF04 bekerja dengan baik, dengan respon buzzer dan pengereman menggunakan solenoid rata-rata 1 detik.
4.1.5 Pengambilan Data Pengamatan Sensor LM35
Tabel 4.9 Data Keluaran Suhu Mesin pada kendaraan menggunakan sensor LM35
Suhu Waktu Respon Buzzer (Detik) Tegangan (V)
810C 1,2 4,94
820C 1,2 4,95
Berikut ini foto – foto yang menampilkan, jarak,kecepatan, dan suhu mesin yang terukur.
Gambar 4.1 Sistem pengaman dalam keadaan terkunci (non aktif)
Gambar 4.3 Kecepatan dan Suhu mesin yang terukur ditampilkan pada LCD
4.2 Pembahasan
1. Yang dibuat pada perancangan sistem keamanan ini adalah miniatur (prototype) dengan memakai solenoid pada motor dc berputar.
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Adapun Kesimpulan yang dapat diambil dari pembuatan perancangan sistem navigator keamanan kendaraan adalah sebagai berikut :
1. Sistem menggunakan sensor ultrasonik SRF04, Photo transistor, LM35, RFID (Radio Frequency Indentification) sebagai input (masukan). SRF04 berfungsi sebagai sensor jarak, Photo transistor berfungsi untuk mengukur kecepatan, LM35 berfungsi untuk mengukur suhu mesin pada kendaraan.
2. Pada saat kecepatan, jarak dan suhu mesin pada kendaraan melewati ambang batas maka Buzzer akan bunyi sebagai tanda peringatan akan adanya bahaya.
5.2 Saran
BAB II
TINJAUAN PUSTAKA
2. 1 Mikrokontroler ATMega 8535
AVR merupakan seri mikrokontroller CMOS 8-bit buatan Atmel,
berbasis arsitektur RISC (Reduced Instruction Set Computer). Hampir semua
instruksi dieksekusi dalam satu siklus clock. AVR mempunyai 32 register
general-purpose, timer/counter fleksibel dengan mode compare, interupt
internal dan eksternal, serial UART, programmable Watchdog Timer, serta
mode power saving. Beberapa diantaranya mempunyai ADC dan PWM
internal. AVR juga mempunyai In-System Programmable Flash on-chip yang
mengijinkan memori program untuk diprogram ulang dalam sistem
menggunakan hubungan serial SPI. Chip AVR yang digunakan untuk tugas
akhir ini adalah ATmega8535.
ATmega8535 adalah mikrokontroller CMOS 8-bit daya-rendah berbasis
arsitektur RISC yang ditingkatkan. Kebanyakan instruksi dikerjakan pada satu
siklus clock, ATmega8535 mempunyai throughput mendekati 1 MIPS per
MHz membuat disainer sistem untuk mengoptimasi komsumsi daya versus
kecepatan proses.
2.1.1. Pin - Pin Mikrokontroller AVR ATmega8535
Konfigurasi Pin Mikrokontroller AVR ATmega8535 dengan kemasan
40-pin DIP (dual in-line package) dapat dilihat pada Gambar 2.1. Untuk
memaksimalkan performa dan paralelisme, AVR menggunakan arsitektur Harvard
(dengan memori dan bus terpisah untuk program dan data). Instruksi pada memori
program dieksekusi dengan pipelining single level. Selagi sebuah instruksi
Gambar 2.1 Konfigurasi Pin Mikrokontroller ATmega8535
1) Port A (PA7..PA0)
Port A berfungsi sebagai input analog pada A/D Konverter. Port A juga
berfungsi sebagai suatu Port I/O 8-bit dua arah, jika A/DKonverter tidak
digunakan. Pin - pin Port dapat menyediakanresistor internal pull-up (yang
dipilih untuk masing-masing bit).Port A output buffer mempunyai karakteristik
gerakan simetrisdengan keduanya sink tinggi dan kemampuan sumber. Ketika
pinPA0 ke PA7 digunakan sebagai input dan secara eksternal ditarikrendah, pin
– pin akan memungkinkan arus sumber jika resistor internal pull-up diaktifkan.
Pin Port A adalah tri-stated manakala suatu kondisi reset menjadi aktif,
sekalipun waktu habis.
2) Port B (PB7..PB0)
Port B adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up
(yang dipilih untuk beberapa bit). Port B output buffer mempunyai karakteristik
input, pin port B yang secara eksternal ditarik rendah akan arus sumber jika
resistor pullupdiaktifkan. Pin Port B adalah tri-stated manakala suatu kondisi
reset menjadi aktif, sekalipun waktu habis.
3) Port C (PC7..PC0)
Port C adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up
(yang dipilih untuk beberapa bit). Port C output buffer mempunyai karakteristik
gerakan simetris dengan keduanya sinktinggi dan kemampuan sumber. Sebagai
input, pin port C yangsecara eksternal ditarik rendah akan arus sumber jika
resistor pullup diaktifkan. Pin Port C adalah tri-stated manakala suatu kondisi
reset menjadi aktif, sekalipun waktu habis.
4) Port D (PD7..PD0)
Port D adalah suatu Port I/O 8-bit dua arah dengan resistor internalpull-up
(yang dipilih untuk beberapa bit). Port D output buffer mempunyai karakteristik
gerakan simetris dengan keduanya sinktinggi dan kemampuan sumber. Sebagai
input, pin port D yangsecara eksternal ditarik rendah akan arus sumber jika
resistor pullup diaktifkan. Pin Port D adalah tri-stated manakala suatu kondisi
reset menjadi aktif, sekalipun waktu habis.
5) RESET (Reset input)
6) XTAL1 (Input Oscillator)
7)XTAL2 (Output Oscillator) AVCC adalah pin penyedia tegangan untuk port
A dan A/D Konverter
8)AREF adalah pin referensi analog untuk A/D konverter.
2.1.2. Port Sebagai Input / Output Digital
ATmega8535 mempunyai empat buah port yang bernama PortA, PortB,
PortC, dan PortD. Keempat port tersebut merupakan jalur bi-directional dengan
Tiap port mempunyai tiga buah register bit, yaitu DDxn, PORTxn, dan
PINxn. Huruf ‘x’ mewakili nama huruf dari port sedangkan huruf ‘n’ mewakili
nomor bit. Bit DDxn terdapat pada I/O address DDRx, bit PORTxn terdapat
pada I/O address PORTx, dan bit PINxn terdapat pada I/O address PINx. Bit
DDxn dalam regiter DDRx (Data Direction Register) menentukan arah pin. Bila
DDxn diset 1 maka Px berfungsi sebagai pin output. Bila DDxn diset 0 maka Px
berfungsi sebagai pin input. Bila PORTxn diset 1 pada saat pin terkonfigurasi
sebagai pin input, maka resistor pull-up akan diaktifkan. Untuk mematikan
resistor pull-up, PORTxn harus diset 0 atau pin dikonfigurasi sebagai pin output.
Pin port adalah tri-state setelah kondisi reset. Bila PORTxn diset 1 pada saat pin
terkonfigurasi sebagai pin output maka pin port akan berlogika 1. Dan bila
PORTxn diset 0 pada saat pin terkonfigurasi sebagai pin output maka pin port
akan berlogika 0.
Saat mengubah kondisi port dari kondisi tri-state (DDxn=0, PORTxn=0)
ke kondisi output high (DDxn=1, PORTxn=1) maka harus ada kondisi peralihan
apakah itu kondisi pull-up enabled (DDxn=0, PORTxn=1) atau kondisi output
low (DDxn=1, PORTxn=0). Biasanya, kondisi pull-up enabled dapat diterima
sepenuhnya, selama lingkungan impedansi tinggi tidak memperhatikan
perbedaan antara sebuah strong high driver dengan sebuah pull-up. Jika ini
bukan suatu masalah, maka bit PUD pada register SFIOR dapat diset 1 untuk
mematikan semua pull-up dalam semua port. Peralihan dari kondisi input
dengan pull-up ke kondisi output low juga menimbulkan masalah yang sama.
Maka harus menggunakan kondisi tri-state (DDxn=0, PORTxn=0) atau kondisi
output high (DDxn=1, PORTxn=0) sebagai kondisi transisi. Lebih detil
2.2 Radio Frequency Identification Device (RFID)
Radio Frekuensi Identification Device (RFID) adalah suatu perangkat
teknologi komunikasi yang bekerja secara wireless. RFID memungkinkan
pengguna untuk mengidentifikasi objek tag dengan menggunakan frekuensi
radio. Cara kerja dari RFID adalah mendeteksi dan mengidentifikasikannya tag
dengan menggunakan reader, kemudian mentransmisikan data hasil baca ke
komputer host atau perangkat – perangkat yang lainnya untuk diproses lebih
lanjut. Secara umum, terdapat beberapa bagian penting dalam RFID yang
digunakan dalam suatu sistem yaitu reader, tag, dan host (controller).
2.2.1 Readers RFID
Sebuah Reader RFID adalah benar-benar radio, seperti yang ada di dalam
mobil yang membedakan adalah Reader RFID mengambil menggunakan signal
analog bukan hip-hop. Reader-nya menghasilkan listrik yang mengalir melalui
kabel, listrik tersebut mengenai sebagian logam pada antena dan
Gambar 2.2 RFID Card
Gambar 2.3 Cara Kerja RFID
Reader tidak hanya menghasilkan sinyal yang dikirim melalui antena ke
angkasa, tetapi juga mendengarkan respon dari tag sehingga reader merupakan
penjembatan antara tag RFID dan modul controller. Reader RFID pada dasarnya
adalah piranti komputer mini yang terdiri dari tiga bagian: antena, modul RF yang
bertugas untuk berkomunikasi dengan tag RFID dan modul controller yang
reader juga berfungsi sebagai pemberi daya (untuk tag pasif) dan menuliskan data
ke dalam tag (untuk smart tag). Reader RFID mengirimkan dan menerima
gelombang analog dan mengubah mereka menjadi untaian nol dan satu, bit dari
informasi digital.
2.2.2 Tag
Tag dapat bekerja dengan mengambil tenaga dari energi gelombang
radio yang dipancarkan oleh reader. Fungsi dari tag adalah memberikan
tanggapan kepada reader dengan mengirimkan sinyal kembali sesaat setelah
reader mengirimkan sinyal radio ke udara.
Tag RFID dibuat dari dua bagian dasar: chip, atau integrated circuit
(IC), dan antenna. chip adalah sebuah komputer kecil yang menyimpan nomor
seri unik dari chip. Chip juga memiliki logika untuk memberitahu dirinya apa
yang harus dilakukan saat berada didepan reader. Antena memungkinkan chip
untuk menerima tenaga dan berkomunikasi, memungkinkan tag RFID untuk
bertukar data dengan reader. Tipe komunikasi yang mengijinkan perpindahan
ini terjadi yang disebut backscatter. Reader mengirimkan gelombang
elektromagnetik pada satu frekuensi yang spesifik. Gelombang itu mengenai
Tag RFID, dan tag kemudian Scatters back gelombangnya dengan frekuensi
berbeda dengan menyandikan informasi dari chip pada gelombang backscatter
2.3 Sensor Ultrasonik SRF04
SRF04 merupakan sensor pengukur jarak yang menggunakan ultrasonik.
Prinsip kerja sensor ini digambarkan dalam Gambar. Pulsa ultrasonik, yang
merupakan sinyal ultrasonik dengan frekuensi ±41 kHz sebanyak 12 periode,
dikirimkan dari pemancar ultrasonik. Ketika pulsa mengenai benda penghalang,
pulsa ini dipantulkan, dan diterima kembali oleh penerima ultrasonik. Dengan
mengukur selang waktu antara saat pulsa dikirim dan pulsa pantul diterima. Jarak
antara alat pengukur dan benda penghalang bisa dihitung.
Gambar 2.4 Bentuk Fisik Sensor Ultrasonik SRF04
2.4 Photo transistor
Photo transistor merupakan jenis transistor yang bias basisnya berupa cahaya infra
merah. Besarnya arus yang mengalir di antara kolektor dan emitor sebanding dengan
intensitas cahaya yang diterima photo transistor tersebut.
Gambar 2.6 Bentuk dan Simbol dari Photo Transistor
2.4.1 Prinsip Kerja Photo Transistor
Photo transistor sering digunakan sebagai saklar terkendali cahaya infra merah,
yaitu memanfaatkan keadaan jenuh (saturasi) dan mati (cut off) dari photo transistor
tersebut. Prisip kerja photo transistor untuk menjadi saklar yaitu saat pada basis
menerima cahaya infra merah maka photo transistor akan berada pada keadaan jenuh
(saturasi dan saat tidak menerima cahaya infra merah photo transistor berada dalam
kondisi mati (cut off) Stuktur phototransistor mirip dengan transistor bipolar (bipolar
junctoin transistor). Pada daerah basis dapat dimasuki sinar dari luar melalui suatu
celah transparan dari luar kamasan taransistor. Celah ini biasanya dilindungi oleh
suatu lensa kecil yang memusatkan sinar di tepi sambungangan basis emitor. Prinsip
Kerja Sensor Photo Transistor Sambungan antara basis dan kolektor, dioperasikan
dalam catu balik dan berfungsi sebagai fotodioda yang merespon masuknya sinar dari
luar. Bila tak ada sinar yang masuk, arus yang melalui sambungan catu balik sama
dengan nol. Jika sinar dari energi photon cukup dan mengenai sambungan catu balik,
mengenainya. Sambungan antara basis emitor dapat dicatu maju, menyebabkan piranti
ini dapat difungsikan sebagai transistor bipolar konvensional. Arus kolektor dari
phototransistor diberikan oleh:Terminal basis dari photo transistor tidak membutuhkan
sambungan (no connect) untuk bekerja. Jika basis tidak disambung dan VCE adalah
positif, sambungan basis kolektor akan berlaku sebagai fotodioda yang dicatu balik.
Gambar 2.7 Rangkaian Dasar Photo Transistor
Komponen ini memiliki sifat yang sama dengan transistor yaitu menghasilkan
kondisi cut off dan saturasi. Perbedaannya adalah, bilamana pada transistor kondisi
cut off terjadi saat tidak ada arus yang mengalir melalui basis ke emitor dan kondisi
saturasi terjadi saat ada arus mengalir melalui basis ke emitor maka pada
phototransistor kondisi cut off terjadi saat tidak ada cahaya infrared yang diterima
dan kondisi saturasi terjadi saat ada cahaya infrared yang diterima. Kondisi cut off
adalah kondisi di mana transistor berada dalam keadaan OFF sehingga arus dari
collector tidak mengalir ke emitor. Pada rangkaian gambar diatas, arus akan mengalir
dan membias basis transistor Q2 C9014. Kondisi saturasi adalah kondisi di mana
transistor berada dalam keadaan ON sehingga arus dari collector mengalir ke emitor
dan menyebabkan transistor Q2 tidak mendapat bias atau OFF. Phototransistor
ST8-LR2 memiliki sudut area 15 derajat dan lapisan pelindung biru yang melindungi
komponen ini sebagai sensor peraba adalah digunakan bersama dengan LED Infrared
yang dipancarkan ke permukaan tanah. Apabila permukaan tanah atau lantai
berwarna terang, maka sinyal infrared akan dikembalikan ke sensor dan diterima
oleh ST8-LR2. Namun bila permukaan tanah atau lantai berwarna gelap, maka sinyal
infrared akan diserap dan hanya sedikit atau bahkan tidak ada yang kembali.
2.5 Sensor Suhu LM35
Sensor suhu LM35 adalah komponen elektronika yang memiliki fungsi untuk mengubah besaran suhu menjadi besaran listrik dalam bentuk tegangan. Sensor Suhu LM35 yang dipakai dalam penelitian ini berupa komponen elektronika elektronika yang diproduksi oleh National Semiconductor. LM35 memiliki keakuratan tinggi dan kemudahan perancangan jika dibandingkan dengan sensor suhu yang lain, LM35 juga mempunyai keluaran impedansi yang rendah dan linieritas yang tinggi sehingga dapat dengan mudah dihubungkan dengan rangkaian kendali khusus serta tidak
memerlukan penyetelan lanjutan.
Gambar 2.8 Bentuk Fisik LM35
2.6 Buzzer
Buzzer adalah suatu alat yang dapat mengubah sinyal listrik menjadi sinyal
suara. Pada umumnya buzzer digunakan untuk alarm, karena penggunaannya
cukup mudah yaitu dengan memberikan tegangan input maka buzzer akan
mengeluarkan bunyi. Frekuensi suara yang dikeluarkan oleh buzzer yaitu antara
1-5 KHz. Pada umumnya prinsip kerja buzzer hampir sama dengan loud speaker.
Gambar 2.9 Bentuk Fisik Buzzer
2.7 LCD LMB162A
Pada LCD, adalah sebuah peraga kristal cair. Prinsip kerja LCD adalah
mengatur cahaya yang ada, atau nyala LED. Dibandingkan dengan seven segment,
memang LCD lebih dianggap rumit oleh sebagian orang, akan tetapi ada pula orang
yang lebih suka memakai LCD karena pemakaian daya yang sangat rendah, selain itu
juga karena jumlah karakter yang ditampilkan semakin banyak. LMB162A
merupakan LCD dengan tampilan 16x2 baris dengan konsumsi daya rendah.
2.10 Bentuk fisik LCD LMB162A
Tabel 2.1 Fungsi penyemat LCD
No Simbol Logika Keterangan
1 Vss - Catu Daya 0 Volt (Ground)
2 Vcc - Catu Daya 5 Volt
3 Vee - Catu daya untuk LCD
4 RS H/L H: Masukan Data, L: Masukan
Instruksi
5 R/W H/L H: Baca (Read), L: Tulis (Write)
6 E H/L (L) Enable Signal
7 DB0 H/L Data Bit 0
8 DB1 H/L Data Bit 1
9 DB2 H/L Data Bit 2
10 DB3 H/L Data Bit 3
11 DB4 H/L Data Bit 4
12 DB5 H/L Data Bit 5
13 DB6 H/L Data Bit 6
14 DB7 H/L Data Bit 7
15 V+ BL - Backlight 4-4,2 Volt ; 50-200 mA
16 V- BL - Backlight 0 Volt (ground)
2.8 Komponen Elektronika pendukung lainnya
2.8.1 IC Regulator
keluaran apabila terjadi perubahan tegangan masukan pada catu daya. Fungsi lain dari
regulator tegangan adalah untuk perlindungan dari terjadinya hubung singkat pada beban.
Gambar 2.12 Bentuk fisik IC regulator
2.8.2 Transistor BC547
Sebuah transistor BC547 adalah sebuah transistor NPN (Negatif – Positif – Negatif) yang
digunakan untuk berbagai tujuan. Bersama dengan komponen elektronika lainnya seperti
resistor,kumparan dan kapasitor dapat juga digunakan sebagai komponen aktif untuk switch
dan amplifier. Sama seperti semua transistor NPN lainnya,jenis transistor ini
memilikiterminal emitor, basis, atau terminal kontrol, dan terminal kolektor.
Gambar 2.13 Bentuk Fisik Transistor BC547
2.8.3 Kristal 4 MHz
Gambar 2.14 Bentuk fisik Kristal 4 MHz
2.8.4 Kapasitor
Kapasitor adalah komponen elektronika yang mampu menyimpan arus dan
tegangan listrik untuk sementara waktu. Seperti hal nya juga resistor, kapasitor
adalah termasuk salah satu komponen pasif yang banyak digunakan dalam membuat
rangkaian elektronika.
Seperti hal nya resistor, kapasitor juga memiliki nilai satuan yang
dinyatakan dengan satuan farad. Jenis-jenis kapasitor dapat dibedakan menjadi:
a. Kapasitor elektrolit atau yang lebih dikenal dengan sebutan elco.
Kapasitor jenis ini memiliki dua kutub, yaitu kutub negatif dan positif.
b. Kapasitor mylar, bahan penyekatnya terbuat dari plastik.
c. Kapasitor keramik, bahan penyekat terbuat dari keramik.
2.8.5 Resistor
Resistor merupakan komponen pasif yang dibuat untuk mendapatkan
hambatan tertentu. Resistor yang paling banyak digunakan terbuat dari karbon yang
dilapiskan pada sebatang keramik. Resistor semacam ini disebut resistor film
karbon. Resistor karbon mengunakan sandi warna yang dicatkan pada badan
resistor untuk menyatakan nilai hambatan. Untuk resistor dengan toleransi 5%
dan 10% digunakan empat buah cincin, seperti ditunjukkan pada Gambar 2.7 di
bawah ini:
(a) (b)
Gambar 2.16 (a) Kode warna pada resistor dan (b) simbolnya
Dari ujung ke tengah–tengah tahanan dimana warna cincin pertama
menunjukkan angka pertama dan warna cincin kedua menunjukkan angka kedua dan
warna cincin ketiga menunjukkan faktor perkalian dan warna cincin terakhir
menunjukkan toleransi dari resistor tersebut. Resistor dibuat dengan ukuran badan
yang mencerminkan kemampuan bertahan terhadap daya lesap yang diterimanya
jika dialiri arus listrik. Suatu resistor dengan hambatan (R) yang dilalui arus (I) akan
menerima daya lesap sebesar P= I2.R. Daya ini akan menaikkan suhu resistor, dan
jika melebihi kemampuan daya yang ditentukan dapat menyebabkan kerusakan
yang permanen, berupa perubahan terhadap nilai hambatan ataupun membuat
BAB I
PENDAHULUAN
1.1 Latar Belakang
Keamanan merupakan suatu hal yang sangat penting bagi semua
orang.antara lain keamanan kendaraan. Untuk memberikan rasa aman,
Peningkatan aktivitas penduduk dewasa ini tentunya harus diimbangi oleh
mobilitas yang tinggi,tranportasi menjadi jantung pendukungnya. Salah
satunya mobil. Di kota-kota besar mobil merupakan salah satu moda
transportasi yang banyak digunakan. Dalam berkendara, ada satu aspek yang
harus diperhatikan, yaitu system keselamatan (Safety Technology) yang
terdapat pada mobil tersebut.
Pada dasarnya, sistem keselamatan mobil dibagi dua, yaitu sistem
keselamatan aktif (Active Safety) dan sistem keselamatan Pasif (Passive
Safety). Sistem Keselamatan aktif (Active Safety), adalah suatu sistem atau teknologi yang terdapat pada mobil yang mencegah terjadinya kecelakaan.
Sedangkan sistem keselamatan pasif pada mobil akan bekerja jika kecelakaan
sudah tidak bias dihindarkan. Ketika sistem keselamatan aktif sudah tidak
mampu dicegah, maka sistem ini mulai diaktifkan.
Seiring dengan banyaknya pengguna mobil, kecelakaan pun sering terjadi,
terutama pada saat warga melakukan aktivitas mudik. Aktivitas mudik setiap
tahunnya menelan banyak korban, baik korban yang luka-luka maupun
meninggal dunia,hal ini diakibatkan oleh kecelakaan lalu lintas. Pada tahun
2014, kecelakaan lalu lintas terjadi sebanyak 3.057 kasus. Korban yang
Untuk mengatasi kecelakaan yang sering terjadi,maka dibuatlah suatu
sistem keamanan berkendara,yang diharapkan nantinya dapat menghindari
terjadinya kecelakaan. Sistem kerjanya menggunakan Mikrokontroler ATMega
8535 beserta perangkat lunak program. Sensor Ultrasonik, Phototransistor, dan
LM 35 sebagai sensor yang digunakan untuk memperoleh data yang kemudian
dikirim pada Mikrokontroler ATMega 8 untuk diproses, sehingga membuat
kendaraan dapat terhindar dari kecelakaan dan sistem pengamanannya
menggunakan RFID (Radio Frequency Identification).
Berdasarkan uraian diatas,penulis tertarik untuk mengambil judul
“Perancangan Sistem Navigator Keamanan Kendaraan Berbasis ATMega
8535” sebagai judul skripsi.
1.2 Rumusan Masalah
1. Bagaimana merancang suatu rangkaian agar RFID, sensor ultrasonik,
photo transistor, dan LM35 dapat mengirim data ke Mikrokontroler
ATMega 8535.
2. Bagaimana merancang suatu sistem yang akan mengatur kecepatan,
jarak, dan suhu mesin pada mobil sehingga dapat terhindar dari
kecelakaan.
1.3 Batasan Masalah
Untuk mengatasi masalah-masalah yang ada, maka penulis membatasi
ruang lingkup masalah sebagai berikut :
1. Rancangan sistem menggunakan RFID untuk sistem keamanan
(pengunci) pada kendaraan.
2. Rancangan sistem menggunakan sensor Ultrasonik SRF04 untuk
meter. Pada rancangan sistem ini hanya menggunakan prototype
(miniatur) namun pada prakteknya, pada mobil tidak digunakan sensor
ultrasonik SRF04
3. Rancangan sistem menggunakan sensor LM35 untuk mengukur suhu
radiator pada mobil. Pada rancangan sistem ini hanya menggunakan
prototype (miniatur) namun pada prakteknya, untuk mengatur suhu radiator pada mobil digunakan sensor termokopel.
4. Rancangan sistem menggunakan Photo transistor untuk mengukur
kecepatan pada mobil.
5. Bunyi Buzzer akan menjadi tanda peringatan akan bahaya, dan LCD
akan menampilkan nilai jarak, kecepatan, dan suhu mesin pada mobil.
6. Sistem dikontrol oleh sebuah Mikrokontroler AVR yang deprogram
dengan bahasa C (CV-AVR).
1.4 Tujuan Penelitian
Tujuan penelitian ini adalah dihasilkannya rancang bangun suatu alat
yang dapat memberikan peringatan kepada pengendara pada saat mengendarai
mobil, sehingga dapat terhindar dari kecelakaan.
1.5 Manfaat Penelitian
Manfaat yang diperoleh dari penelitian ini adalah dapat menghindari
terjadinya kecelakaan yang marak terjadi , karena pada saat jarak, kecepatan,
dan suhu radiator pada mobil di atas batas normal, alat ini akan memberikan
alarm tanda bahaya, dan mengerem secara otomatis, sehingga sebisa mungkin
PERANCANGAN SISTEM NAVIGATOR KEAMANAN KENDARAAN
BERBASIS ATMEGA 8535
ABSTRAK
Keamanan merupakan suatu hal yang sangat penting bagi semua orang.antara lain
keamanan kendaraan. Untuk memberikan rasa aman, Peningkatan aktivitas
penduduk dewasa ini tentunya harus diimbangi oleh mobilitas yang
tinggi,tranportasi menjadi jantung pendukungnya. Salah satunya mobil. Dalam
berkendara, ada satu aspek yang harus diperhatikan, yaitu system keselamatan
(Safety Technology) yang terdapat pada mobil tersebut. Dalam sistem perancangan
ini menggunakan RFID (Radio Frequency Identification Device) yang mana
merupakan sistem keamanan dari kendaraan. Mikrokontroler ATMega 8535
sebagai pengatur dari sistem ini. Cara kerja dari sistem ini adalah SRF04, Photo
transistor, LM35, RFID (Radio Frequency Indentification Device) sebagai input
(masukan). SRF04 berfungsi sebagai sensor jarak, Photo transistor berfungsi untuk
mengukur kecepatan, LM35 berfungsi untuk mengukur suhu mesin pada
kendaraan. Pada saat kecepatan, jarak dan suhu mesin pada kendaraan melewati
ambang batas maka Buzzer akan bunyi sebagai tanda peringatan akan adanya
bahaya.
VEHICLE SECURITY NAVIGATOR SYSTEM DESIGN BASED
ATMEGA 8535
ABSTRACT
Security is a very important thing for all the other people, for example vehicle
safety. To give a sense of security, Increased activity of the adult population is
certainly to be offset by a high mobility, transport is at the heart of his supporters.
One of these cars. In the drive, there is one aspect that must be considered, namely
the safety system (Safety Technology) found on the car. In this design system using
RFID (Radio Frequency Identification Device) which is the security system of the
vehicle. Microcontroller ATMega 8535 as a regulator of this system. The workings
of this system is the SRF04, Photo transistor, LM35, RFID (Radio Frequency
Identification Device) as input. SRF04 function as a proximity sensor, a photo
transistor is used to measure the speed, the LM35 is used to measure the
temperature of the engine in the vehicle. At the current speed, distance and
temperature of the engine in the vehicle passed the threshold, the buzzer will sound
as a warning sign of the dangers.
PERSETUJUAN
Judul : Perancangan Sistem Navigator Keamanan
Kendaraan
Berbasis ATMEGA 8535
Kategori : Skripsi
Nama : Ledyana Fitriani
Nomor Induk Mahasiswa : 130821014
Program Studi : Sarjana (S1) Fisika Ekstensi
Departemen : Fisika
Fakultas : Matematika dan Ilmu Pengetahuan Alam
Universitas
Sumatera Utara
Disetujui di
Medan, Januari 2016
Komisi Pembimbing :
Diketahui/Disetujui oleh
Ketua Departemen Fisika FMIPA USU Pembimbing,
Dr. Marhaposan Situmorang Dr. Marhaposan Situmorang
PERNYATAAN
PERANCANGAN SISTEM NAVIGATOR KEAMANAN KENDARAAN
BERBASIS ATMEGA 8535
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa
kutipan dan ringkasan yang masing- masing disebutkan sumbernya.
Medan, Januari 2016
LEDYANA FITRIANI
PENGHARGAAN
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Pemurah dan
Maha Penyayang, dengan limpah karunia-Nya Penulis dapat menyelesaikan
penyusunan skripsi ini dengan judul Perancangan Sistem Navigator Keamanan
Kendaraan Berbasis ATMega 8535.
Dalam kesempatan ini penulis menyampaikan rasa hormat dan ucapan terima
kasih yang sebesar‐ besarnya kepada keluarga serta orang‐ orang yang mendukung
sehingga penulis dapat menyelesaikan proyek Skripsi ini. Pada kesempatan ini penulis
mengucapkan terima kasih banyak kepada :
1. Yth.Bapak Dekan Dr. Sutarman beserta jajarannya di lingkungan FMIPA USU.
2. Bapak Dr. Marhaposan Situmorang, selaku Ketua Program Studi Fisika S1 Fakultas
Matematika Dan Ilmu Pengetahuan Alam.
3. Bapak Drs. Syahrul Humaidi, M. Sc, selaku Sekretaris Program Studi Fisika S1
Fakultas Matematika Dan Ilmu Pengetahuan Alam.
4. Bapak Dr. Marhaposan Situmorang selaku dosen pembimbing yang telah bersedia
dengan sabar meluangkan waktunya untuk membimbing dan mengarahkan
penulis dalam menyelesaikan skripsi ini.
5. Seluruh Dosen dan Karyawan Program Studi Fisika SI Departemen Fisika FMIPA
USU.
6. Ibunda Zahrul Fuady terima kasih atas kasih sayang dan kepercayaan yang telah
kalian berikan kepada anak kalian ini, serta kakak dan adik tercinta terimakasih
atas dukungannya, doa dan motivasi yang diberikan dari awal mulai perkuliahan
sampai penulisan skripsi ini serta buat seluruh keluarga yang telah membantu,
mendukung dan memberikan support terhadap pendidikan saya hingga bisa
7. Semua teman‐teman seperjuangan angkatan 2013 Ekstensi Fisika Instrumentasi
yang sama‐sama merasakan pahit manisnya membuat Skripsi serta selama kuliah
di Universitas Sumatera Utara.
8. Dan kepada semua pihak yang telah berkontribusi dalam kehidupan penulis yang
tidak mampu saya tuliskan satu persatu.
Penulis menyadari sepenuhnya bahwa dalam pembuatan skripsi ini
masih jauh dari kesempurnaan, untuk itu penulis mengharapkan kritik dan
saran dari pembaca yang bersifat membangun dalam penyempurnaan skripsi ini.
Semoga laporan ini menjadi ibadah yang baik bagi penulis dan menjadi ilmu
yang bermanfaat bagi pembaca.
Medan, Januari 2016
Hormat Penulis,
Ledyana Fitriani
PERANCANGAN SISTEM NAVIGATOR KEAMANAN KENDARAAN
BERBASIS ATMEGA 8535
ABSTRAK
Keamanan merupakan suatu hal yang sangat penting bagi semua orang.antara lain
keamanan kendaraan. Untuk memberikan rasa aman, Peningkatan aktivitas
penduduk dewasa ini tentunya harus diimbangi oleh mobilitas yang
tinggi,tranportasi menjadi jantung pendukungnya. Salah satunya mobil. Dalam
berkendara, ada satu aspek yang harus diperhatikan, yaitu system keselamatan
(Safety Technology) yang terdapat pada mobil tersebut. Dalam sistem perancangan
ini menggunakan RFID (Radio Frequency Identification Device) yang mana
merupakan sistem keamanan dari kendaraan. Mikrokontroler ATMega 8535
sebagai pengatur dari sistem ini. Cara kerja dari sistem ini adalah SRF04, Photo
transistor, LM35, RFID (Radio Frequency Indentification Device) sebagai input
(masukan). SRF04 berfungsi sebagai sensor jarak, Photo transistor berfungsi untuk
mengukur kecepatan, LM35 berfungsi untuk mengukur suhu mesin pada
kendaraan. Pada saat kecepatan, jarak dan suhu mesin pada kendaraan melewati
ambang batas maka Buzzer akan bunyi sebagai tanda peringatan akan adanya
bahaya.
VEHICLE SECURITY NAVIGATOR SYSTEM DESIGN BASED
ATMEGA 8535
ABSTRACT
Security is a very important thing for all the other people, for example vehicle
safety. To give a sense of security, Increased activity of the adult population is
certainly to be offset by a high mobility, transport is at the heart of his supporters.
One of these cars. In the drive, there is one aspect that must be considered, namely
the safety system (Safety Technology) found on the car. In this design system using
RFID (Radio Frequency Identification Device) which is the security system of the
vehicle. Microcontroller ATMega 8535 as a regulator of this system. The workings
of this system is the SRF04, Photo transistor, LM35, RFID (Radio Frequency
Identification Device) as input. SRF04 function as a proximity sensor, a photo
transistor is used to measure the speed, the LM35 is used to measure the
temperature of the engine in the vehicle. At the current speed, distance and
temperature of the engine in the vehicle passed the threshold, the buzzer will sound
as a warning sign of the dangers.
DAFTAR ISI
2.1.1 Pin-pin Mikrokontroler AVR ATMega 8535 ... 4
2.1.2 Port sebagai Input / Output Digital ... 6
2.2 Radio Frequency Identification Device (RFID) ... 7
2.2.1 Readers RFID ... 8
2.8 Komponen elektronika pendukung lainnya ... 15
2.8.1 IC Regulator ... 15
3.2 Perancangan pengendali sistem ... 20
3.2.2 Mikrokontroler ... 21
3.2.3 LM 35 ... 22
3.2.4 LCD (Liquid Crystal Display) ... 23
3.3 Flowchart ... 25
3.4 Perancangan algoritma program ... 27
3.5 Rancangan program... 27
BAB IV DATA DAN ANALISA DATA ... 32
4.1 Pengambilan data ... 32
4.1.1 Pengambilan data test point rangkaian mikrokontroler ATMega 8535 ... 32
4.1.2 Pengambilan data test point rangkaian regulator LM 7805 ... 33
4.1.3 Pengambilan Data test point rangkaian LCD ... 34
4.1.4 Pengambilan data pengamatan sensor SRF 04 ... 34
4.1.5 Pengambilan data pengamatan sensor LM 35 ... 36
4.2 Pembahasan ... 38
BAB V KESIMPULAN DAN SARAN ... 39
5.1 Kesimpulan ... 39
5.2 Saran ... 40
DAFTAR TABEL
Halaman
Tabel 2.1 Fungsi penyemat pada LCD ... 15
Tabel 4.1 Data test point rangkaian mikrokontroler ATMega 8535 ... 32
Tabel 4.2 Data test point rangkaian catu daya ... 33
Tabel 4.3 Data test point rangkaian LCD ... 34
Tabel 4.4 Data keluaran sensor SRF04 depan ... 34
Tabel 4.5 Data keluaran sensor SRF04 belakang ... 35
Tabel 4.6 Data keluaran sensor SRF04 samping kanan ... 35
Tabel 4.7 Data keluaran sensor SRF04 samping kiri ... 36
DAFTAR GAMBAR
Halaman
Gambar 2.1 Konfigurasi pin mikrokontroler ATMega 8535 ... 5
Gambar 2.2 RFID card ... 8
Gambar 2.3 Cara kerja RFID ... 8
Gambar 2.4 Bentuk fisik sensor ultrasonik SRF04 ... 10
Gambar 2.5 Prinsip kerja sensor ultrasonik SRF04 ... 10
Gambar 2.6 Bentu dan simbol dari photo transistor... 11
Gambar 2.7 Rangkaian dasar photo transistor ... 12
Gambar 2.8 Bentuk fisik LM 35 ... 13
Gambar 2.9 Bentuk fisik Buzzer ... 14
Gambar 2.10 Bentuk fisik LCD LMB162A ... 14
Gambar 2.11 Konfigurasi LCD ... 14
Gambar 2.12 Bentuk fisik IC regulator ... 16
Gambar 2.13 Bentuk fisik transistor BC547 ... 16
Gambar 2.14 Bentuk fisik kristal 4MHz ... 17
Gambar 2.15 Bentuk fisik kapasitor ... 17
Gambar 2.16 Kode warna resistor dan simbolnya ... 18
Gambar 3.1 Diagram Blok Rangkaian ... 19
Gambar 3.2 Rangkaian sensor ultrasonic SRF04 ... 21
Gambar 3.3 Konfigurasi pin ATMega 8535 ... 22
Gambar 3.4 Rangkaian LM 35 ... 23
Gambar 3.5 Rangkaian LCD ... 24
Gambar 3.6 Flowchart ... 25
Gambar 4.1 Sistem pengaman dalam keadaan terkunci (non aktif) .. 37
Gambar 4.2 Jarak yang terukur pada sensor ultrasonik depan ... 37
DAFTAR LAMPIRAN
Halaman
Gambar rangkaian keseluruhan ... 42
Pengujian program ... 43
Datasheet ATMega 8535 ... 57
Datasheet SRF04 ... 63
Datasheet RFID ………. 69