Diajukan Guna Memenuhi Persyaratan Untuk Mencapai Derajat Strata-1 Pada Prodi Teknik Elektro Fakultas Teknik
Universitas Muhammadiyah Yogyakarta
APRIZAL NUGGRAHWANZAH 20120120042
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK
i
TUGAS AKHIR
Diajukan Guna Memenuhi Persyaratan Untuk Mencapai Derajat Strata-1 Pada Program Studi Teknik Elektro Fakultas Teknik
Universitas Muhammadiyah Yogyakarta
Disusun oleh:
APRIZAL NUGGRAHWANZAH 20120120042
PROGRAM STUDI TEKNIK ELEKTROFAKULTAS TEKNIK UNIVERSITAS MUHAMMADIYAH YOGYAKARTA
ii
NIM : 20120120042
Program Studi : Teknik Elektro Fakultas : Teknik
Universitas : Universitas Muhammadiyah Yogyakarta
Dengan ini saya menyatakan dengan sesungguhnya bahwa tugas akhir ini adalah asli hasil karya saya dan tidak terdapat karya yang pernah diajukan untuk memperoleh gelar kesarjanaan di Perguruan Tinggi dan sepanjang pengetahuan saya juga tidak terdapat karya atau pendapat yang pernah ditulis atau dipublikasikan oleh orang lain, kecuali yang secara tertulis disebutkan sumbernya dalam naskah dan dalam daftar pustaka.
Yogyakarta, 28 Maret 2017 Yang menyatakan,
iii
“I
f you fall a thausand times, stand up milions of times because you
do not know how close you are to success
”
iv
petunjuk-Nya sehingga penyusunan tugas akhir ini telah terselesaikan dengan baik. Dalam penyusunan tugas akhir ini penulis telah banyak mendapatkan arahan, bantuan, serta dukungan dari berbagai pihak. Oleh karena itu pada kesempatan ini penulis mengucapan terima kasih kepada:
1. Allah SWT yang telah memberikan karunia, rahmat, dan hidayah Nya.
2. Kedua orang tua saya, Ibu Badaria dan bapak muhammad zain yang tidak pernah lelah mendoakan dan mendukung saya dalam penyusunan tugas akhir ini.
3. Dr. Ramadoni Syahputra, S.T., M.T. dan Muhamad Yusvin Mustar, S.T., M.Eng. selaku Dosen Pembimbing yang telah berkenan meluangkan waktu dan pikiran dalam penyelesaian tugas akhir ini.
4. Saudara Rizky Agung kurniawan yang selalu menyemangati dan menemani selama proses pembuatan tugas akhir ini dari awal sampai akhir.
5. Saudara Rahmat Darmawan, Ainur Rafik, dan Yoga Yudistira yang telah membantu pemrograman dalam pembuatan skripsi ini.
6. Saudara Syarifuddin Bisri, Ivan Adhi Prabawa, dan Ilham Bayoe Ramadhani yang telah menemani proses pembuatan skripsi ini.
7. Saudara Teknik Elektro 2012 kelas A dan B.
v
Alhamdulillahirabbilalamin puji syukur penulis panjatkan kehadirat Allah SWT, berkat rahmat-Nya penulis dapat menyelesaikan tugas akhir dengan judul “Rancang Bangun Alat Penghiutng Bibit Ikan Otomatis ” yang disusun sebagai syarat untuk menyelesaikan pendidikan Strata-1 Universitas Muhammadiyah Yogyakarta. Semoga karya ini dapat bermanfaat dan menjadi kontribusi bagi khasanah ilmu pengetahuan, khususnya bagi rekan-rekan mahasiswa seperjuangan.
Penulis menyadari terselesaikannya laporan ini tidak terlepas dari dukungan, bantuan, dan bimbingan, serta saran-saran yang berharga dari semua pihak. Oleh karena itu dengan tulus hati penulis ingin mengucapkan terimakasih kepada
1. Bapak Ir. Agus Jamal, M.Eng.
2. Bapak Dr. RamadoniSyahputra, S.T., M.T. 3. Bapak Ir. SlametSuripto, M.Eng.
4. Seluruh dosen program studi Teknik Elektro Universitas Muhammadiyah Yogyakarta.
5. Kedua orang tua, Ibu Badaria J. dan Bapak Muhammad Zain B.
6. Seluruh staf laboratorium Teknik Elektro Universitas Muhammadiyah Yogyakarta.
7. Saudara Teknik Elektro 2012 Kelas A dan B.
8. Semua pihak yang telah secara tidak langsung membantu penulis.
vi informasi.
Yogyakarta, 28 Maret 2017 Penulis
priority calculation accuracy and fast. This tool uses arduino mega 2560 as microcontroller,
and some of the other major components such as sensors to detect the presence or absence of
fish passing and LCD as a medium to display the number of fish that are detected by the
sensor.
The fingerlings pass twice calculation process that is manual counting process and
using the tool. After passing this process, percentage calculation accuracy tool will appear.
After designing process, manufacturing, and experiments finish, the results are
satisfactory with an average percentage of 98.81 % accuracy of the calculation, in the other
ikan dengan jumlah yang banyak dengan mengutamakan akurasi perhitungan yang tepat dan cepat. Alat menggunakan arduino mega 2560 sebagai mikrokontroler, dan beberapa komponen utama lainnya seperti sensor untuk mendeteksi ada atau tidaknya ikan yang lewat dan LCD sebagai media untuk menampilkan jumlah ikan yang terdeteksi oleh sensor.
Bibit ikan ikan melewati dua kali proses perhitungan yaitu dengan perhitungan dengan cara manual dan perhitungan jumlah bibit ikan dengan alat, setelah melewati kedua proses perhitungan tersebut maka akan kelihatan persentase akurasi perhitungan alat yang telah dibuat.
Setelah melewati proses perancangan, pembuatan dan percobaan, didapat hasil yang cukup memuaskan dengan persentase rata-rata akurasi perhitungannya sebesar 98,81%, dengan kata lain persentase erornya sebesar 1,19%.
1
Perkembangan teknologi akhir-akhir ini menuntun manusia agar kreatif dalam menciptakan alat-alat yang menerapkan teknologi di dalamnya dengan tujuan untuk mempermudah tugas manusia dalam kegiatan sehari-hari. Tetapi ada beberapa bidang usaha yang masih jarang tersentuh teknologi, bukan berarti teknologi tidak bisa bersatu dibidang usaha tersebut. Salah satunya adalah bidang usaha peternakan ikan. Usaha peternakan ikan akan lebih maju dan berkembang jika didukung oleh teknologi didalamnya. Ada beberapa jenis pekerjaan dibidang perikanan yaitu budidaya, pemeliharaan dan penjualan ikan. Peternak ikan akan menjual bibit ikannya ke konsumen dengan sistem harga satuan. Masalahnya adalah bagaimana jika ada konsumen atau pemborong yang membeli dalam jumlah besar, misalnya 1000-10000 ekor maka otomatis akan membutuhkan waktu yang tidak sebentar dan membutuhkan karyawan lebih dari satu orang untuk menghitung bibit ikan tersebut.
Dari latar belakang tersebut, maka timbul sebuah ide untuk menciptakan suatu alat untuk mempermudah peternak ikan dalam menghitung bibit ikan yang akan dijual. Suatu alat yang akan menghitung jumlah bibit ikan yang mengutamaka ketepatapatan akurasi perhitungan jumlah ikan yang dituangkan ke wadah penampung dan akan ditampilkan melalui LCD.
1.2 Rumusan Masalah
Berdasarkan latar belakang di atas, rumusan masalah yang akan dibahas adalah sebagai berikut :
1. Mengolah masukan data jumlah bibit ikan yang masuk dan akan ditampilkan melalui LCD.
2. Memperbaiki disain atau model akuarium mekanik dari skripsi sebelumnya agar ikan masuk ke lubang pipa dengan cara beraturan satu persatu.
1.3 Batasan Masalah
Adapun batasan masalah pada pembuatan alat penghitung jumlah bibit ikan ini adalah sabagai berikut :
1. Perancangan dan pembuatan alat mekanik yang akan digunakan untuk alat penghitung bibit ikan otomatis.
2. Perancangan rangkain mikrokontroler sebagai pengolah data dan pengatur kerja perangkat keras lainnya dalam sistem penghitung jumlah bibit ikan.
3. Perancangan dan cara menggunakan rangkaian sensor yang akan digunakan untuk mendeteksi bibit ikan yang akan dihitung.
4. Perancangan perangkat lunak untuk menghitung data dari sensor yang akan digunakan.
2. Meningkatkan akurasi perhitungan jumlah ikan yang melewati sensor dari skripsi sebelumnya.
1.4.2 Manfaat
Manfaat yang didapat dari tugas akhir ini adalah : 1. Bagi Mahasiswa
a. Mendapat kesempatan untuk terjun ke dunia praktis dan menerapkan ilmu yang telah didapat untuk menyelesaikan permasalahan dalam dunia nyata.
b. Penelitian ini sebagai sarana pengembangan diri dan memperluas wawasan di dunia nyata
2. Bagi pihak Universitas Muhammadiyah Yogyakarta (UMY)
Sebagai tambahan pustaka bagi jurusan Teknik Elektro, Fakultas Teknik, dan Universitas Muhammadiyah Yogyakarta pada umumnya. 3. Bagi Peternak Ikan
Bila hasil penelitian ini benar-benar direalisasikan, maka peternak ikan lebih hemat waktu, tenaga kerja dan biaya dalam menghitung bibit ikan yang akan dijual.
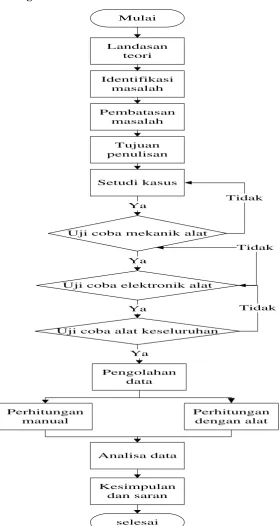
1.5 Metode Penelitian
Karya tulis ini disusun dengan tahap-tahap sabagai berikut :
1. Studi kepustakaan yaitu studi yang dilakukan untuk mendapat pengetahuan dengan cara mengumpulkan data dengan cara mengumpulkan data baik dari internet maupun dari buku-buku.
2. Studi lapangan yaitu dengan cara mengumpulkan komponen yang diperlukan untuk rancangan, merakit komponen dan melakukan pengujian bertahap.
4. Metode perancangan yaitu tahap perancangan yang akan dibuat, mengenai perancangan rangkaian, layout PCB, tata letak komponen yang diperlukan dalam perencanaan mekanik rangkaian.
5. Analisa dan evaluasi, setelah dilakukan pengumpulan data baik berdasarkan studi kepustakaan maupun studi lapangan, maka dilakukan analisis terhadap data-data yang telah terkumpul serta perlu dilakukan evaluasi agar sistem berjalan lancar.
1.6 Sistematika Penulisan BAB I. PENDAHULUAN
Bab ini berisi latar belakang masalah, rumusan masalah, batasan masalah, tujuan dan manfaat, metode penelitian dan sistematika penulisan.
BAB II. LANDASAN TEORI
Bab ini berisi penjelasan tentang dasar-dasar teoritis serta komponen-komponen yang digunakan pada pembuatan alat penghitung jumlan bibit ikan.
BAB III. PERANCANGAN DAN PEMBUATAN
Bab ini berisi tentang proses perancangan alat penghitung jumlah bibit ikan yang akan dibuat serta merealisasikan perancangan dengan proses pembuatan alat penghitung jumlah bibit ikan.
BAB IV. PERINSIP KERJA ALAT DAN UJICOBA
Bab ini berisi prinsip kerja alat serta hasil ujicoba alat serta persentasi keakuratan alat penghitung jumlah bibit ikan yang akan dibuat.
BAB V. PENUTUP
5
RAHMAT, MS merupakan guru besar di IPB (Institut Pertanian Bogor) menciptakan sebuah alat yang bernama FRY COUNTER (Alat Penghitung Benih Ikan) dengan kecepatan dan keakuratan yang sangat tinggi. Fry counter merupakan produk pertama didunia perikanan. Sebelum terciptanya fry counter ini masyarakat menghitung benih ikan dengan dengan cara manual yaitu dengan cara mengambil secara satu persatu ikan di dalam wadah dengan menggunakan gayung atau sejenisnya.
Setelah terciptanya alat penghitung benih ikan ini para penjual bibit ikan dipasar atau para petani ikan tidak perlu lagi menghitung dangan cara mengambil satu persatu ikan di dalam wadah, cukup dengan memasukkannya ke dalam fry counter tersebut maka ikan akan dihitung sacara otomatis oleh alat ini. Dulu
sebelum diciptakannya alat ini bahkan sampai sekarang masih ada diantara para petani atau penjual bibit ikan dipasar yang menghitung dengan cara manual karena belum semua petani ikan dan penjual dipasar menggunakan fry counter ini. Perbandingan sebelum dan sesudah terciptanya alat penghitung benih ikan otomatis yang dinamakan fry counter dapat dilihat pada gambar dibawah ini :
Sumber gambar : tersebut menggunakan ATmega 16 yang diproduksi oleh ATMEL sebagai mikrokontrolernya, satu buah optocuopler yang berfungsi sebagai sensor yang dibantu ic lm324 sebagai pembanding tegangan yang berada pada dua kondisi yaitu akif low dan aktif hight dan LCD yang akan menampilkan jumlah ikan yang dideteksi oleh sensor.
2.1 Arduino
Mikrokontroler adalah sebuah chip yang berfungsi sebagai alat pengontrol rangkaian elektronika, mikrokontroler dapat menyimpan program didalamnya. Mikrokontroler pada umumnya terdiri dari CPU (Central Processing Unit), memori, I/O dan unit pendukung seperti Analog to Digital Converter (ADC) yang sudah terintegrasi di dalamnya. Cara kerja mikrokontroler sebenarnya hanya membaca dan menulis.
2.1.1 Pengertian Arduino
lunak yang berjalan pada komputer. Physical computing adalah membuat sebuah sistem atau perangkat fisik dengan menggunakan software dan hardware yang sifatnya interaktif yaitu dapat menerima rangsangan dari lingkungan dan merespon balik. Physical computing adalah ha yang harus diketahui sebelum kita belajar arduino lebih dalam.
2.1.2 Kelebihan Arduino
Arduino memiki beberapa keunggulan dibanding flatform lainnya yang membuat orang lebih memilih arduino dibanding flatform lainnya. Keunggulan tersebut adalah :
Harganya lebih murah jika dibanding dengan harga flatform lainnya. software Arduino dapat dijalankan pada system operasi Windows,
Macintosh OSX dan Linux, sementara platform lain umumnya terbatas hanya bisa dioperasikan pada Windows.
Sangat mudah dipelajari dan mudah digunakan.
Sistem yang terbuka baik dari sisi software maupun hardwarenya.
2.1.3 Jenis-jenis Arduino
Papan arduino sudah banyak dikembang sesuai dengan kegunaannya masing-masing. Jenis-jenis papan arduino adalah sebagai berikut :
Arduino Mega ADK Arduino Esplora
Dari jenis-jenis arduino di atas, dibawah ini adalah beberapa contoh gambar dari jenis-jenis arduino yang disebutkan di atas.
Gambar 2.2 Arduino Sumber gambar :
https://www.google.com/search?q=arduino&source=lnms&tbm=isch&sa=X&ved =0ahUKEwiO6uz3stLSAhUGvY8KHcJtAgIQ_AUIBygC&biw=1366&bih=619
2.1.4 Bagian-bagian Papan Arduino
Papan arduino memiliki beberapa bagian penting yang perlu dipahami. Bagian-bagian tersebut adalah :
Pin input output
USB yang berfungsi memberi daya pada arduino, komunikasi serial antara arduino dan komputer, dan memuat program pada arduino dari komputer.
Tombol reset yaitu untuk mereset papan arduino sehingga program akan dimulai lagi dari awal.
In circuit serial programing (ICSP) untuk memungkinkan pengguna
untuk memprogram mikrokontroler secara lansung tanpa melalui boar loader.
Mikrokontroler Atmega merupakan komponen utama dari papan arduino yang di dalamnya terdapat CPU, RAM dan ROM.
Sumber daya eksternal, jika ingin diberikan daya eksternal papan arduino bisa menggunakan tegangan DC 9-12 volt.
2.1.5 Software Arduino
IDE Arduino adalah software yang sangat canggih ditulis dengan menggunakan Java. IDE Arduino terdiri dari:
Editor program merupakan sebuah window yang memungkinkan
pengguna menulis dan mengedit program dalam bahasa Processing. Compiler merupakan sebuah modul yang mengubah kode program
(bahasa Processing) menjadi kode biner. Bagaimanapun sebuah microcontroller tidak akan bisa memahami bahasa Processing. Yang bisa dipahami oleh microcontroller adalah kode biner. Itulah sebabnya compiler diperlukan dalam hal ini.
Uploader merupakan sebuah modul yang memuat kode biner dari
komputer ke dalam memory di dalam papan Arduino.
Gambar 2.3 Tampilan IDE arduino 2.1.6 Menginstal Driver USB Pada Windows 10
Hubungkan sistem minimum arduino ke komputer dengan kabel USB
Sumber Gambar :
https://apriliantongr.wordpress.com/2013/09/17/tutorial-cara-instalasi-driver-arduino-uno/
Pada bagian kanan bawah PC akan muncul pop up “installing device driver software” sperti pada gambar di bawah ini.
Gambar 2.5 proses installing driver Arduino Sumber Gambar :
https://apriliantongr.wordpress.com/2013/09/17/tutorial-cara-instalasi-driver-arduino-uno/
Sistem operasi windows tidak menyediakan driver arduino seperti yang terlihat pada gambar dibawah ini. Sehingga proses instalasi harus diakukan secara manual
Gambar 2.6 Tampilam proses installing gagal Sumber Gambar :
https://apriliantongr.wordpress.com/2013/09/17/tutorial-cara-instalasi-driver-arduino-uno/
dibawah ini. Pada bagian Control Panel akan muncul Device Manager, klik untuk menjalankan.
Gambar 2.7 tampilan device manager Sumber Gambar :
https://apriliantongr.wordpress.com/2013/09/17/tutorial-cara-instalasi-driver-arduino-uno/
Cari Unknown device pada bagian Other device, biasanya terdapat tanda seru berwarna kuning, itu disebabkan karena penginstallan tidak berjalan dengan sempurna.
Gambar 2.8 Unknown device pada bagian other device Sumber Gambar :
https://apriliantongr.wordpress.com/2013/09/17/tutorial-cara-instalasi-driver-arduino-uno/
Klik kanan pada “Unknown device” kemudian pilih Update Driver
Gambar 2.9 tampilan untuk update driver software Sumber Gambar :
https://apriliantongr.wordpress.com/2013/09/17/tutorial-cara-instalasi-driver-arduino-uno/
Pilih Browse my computer for driver software. Tampilannya seperti pada gambar dibawah.
Gambar 2.10 mencari driver di PC Sumber Gambar :
https://apriliantongr.wordpress.com/2013/09/17/tutorial-cara-instalasi-driver-arduino-uno/
Gambar 2.11 Tempat folder arduino disimpan. Sumber Gambar :
https://apriliantongr.wordpress.com/2013/09/17/tutorial-cara-instalasi-driver-arduino-uno/
Kemudian lanjutkan dengan mengklik Install pada tampilan Windows Security. Langkanya diperlihatkan pada gambar dibawah.
Gambar 2.12 Installing arduino Sumber Gambar :
https://apriliantongr.wordpress.com/2013/09/17/tutorial-cara-instalasi-driver-arduino-uno/
Gambar 2.13 proses instal berhasil Sumber Gambar :
https://apriliantongr.wordpress.com/2013/09/17/tutorial-cara-instalasi-driver-arduino-uno/
Perhatikan dan ingat nama COM Arduino, karena nama COM ini yang akan digunakan untuk meng-upload program nantinya. Tampilnnya seperti gambar di bawah.
Gambar 2.14 Tampilan COM arduino Sumber Gambar :
2.2Arduino Mega 2560
Arduino mega 2560 adalah papan mikrokontroler yang menggunakan ATmega 2560. Arduino mega memiliki 54 pin input/output digital (14 diantaranya bisa digunakan sebagai output PWM) dan 16 pin input/Output analog, 4 UART (hardware serial port), 16 MHz osilator kristal, koneksi USB, sebuah colokan listrik, header ICSP, dan tombol riset. Semua ini berisi tentang apa yang diperlukan untuk mendukung mikrokontroler. Hanya terhubung dengan komputer melalui kabel USB atau dengan AC to DC adapter atau dengan baterai sebagai sumber tegangan untuk memulainya.
Gambar 2.15 Arduino Mega 2560 Sumber Gambar :
Gambar 2.16 skematik arduino mega Sumber Gambar :
https://www.google.com/imgres?imgurl=https%3A%2F%2Farduino-
info.wikispaces.com%2Ffile%2Fview%2FMega2- 900.jpg%2F421499040%2FMega2- 900.jpg&imgrefurl=https%3A%2F%2Farduino-
info.wikispaces.com%2FMegaQuickRef&docid=N4qm1-8OFtJpgM&tbnid=LuS2VbPVVjl8XM%3A&vet=10ahUKEwiNjbTzwNzSAhXF P48KHQZ8BcUQMwgbKAAwAA..i&w=900&h=636&hl=en&bih=619&biw=13 66&q=arduino%20mega%202560%20pinout&ved=0ahUKEwiNjbTzwNzSAhXF P48KHQZ8BcUQMwgbKAAwAA&iact=mrc&uact=8#h=636&imgrc=LuS2VbP VVjl8XM:&vet=10ahUKEwiNjbTzwNzSAhXFP48KHQZ8BcUQMwgbKAAwA
Tabel 2.1 Spesifikasi arduino mega
Spesifikasi Keterangan
Mikrokontroler ATmega 2560
Operasi tegangan 5 V
Tegangan input (rekomendasi) 7-12 V Tegangan input (batas) 6-20 V
Digital I/O pin 54 (14 dapat digunakan sebagai output PWM
transmitter dan receiver, yaitu antara bagian cahaya dengan bagian deteksi
sumber cahaya terpisah. Biasanya optocoupler digunakan sebagai saklar
elektrik yang bekerja secara otomatis. Optocoupler merupakan komponen
penggandeng (coupling) antara rangkaian input dengan rangkaian output
yang menggunakan media cahaya (opto) sebagai penghubung. Dengan kata
lain, tidak ada bagian yang konduktif antara kedua rangkaian tersebut.
Optocoupler sendiri terdiri dari 2 bagian, yaitu transmitter (pengirim) dan
Gambar 2.17 Optocoupler Sumber Gambar :
http://store.iteadstudio.com/index.php?main_page=product_info&products_ id=243
1. Transmitter
Merupakan bagian yang terhubung dengan rangkaian input atau
rangkaian kontrol. Pada bagian ini terdapat sebuah LED infra merah
(IR LED) yang berfungsi untuk mengirimkan sinyal kepada receiver.
Pada transmitter dibangun dari sebuah LED infra merah. Jika
dibandingkan dengan menggunakan LED biasa, LED infra merah
memiliki ketahanan yang lebih baik terhadap sinyal tampak. Cahaya
yang dipancarkan oleh LED infra merah tidak terlihat oleh mata
telanjang.
2. Receiver
Merupakan bagian yang terhubung dengan rangkaian output
atau rangkaian beban, dan berisi komponen penerima cahaya yang
dipancarkan oleh transmitter. Komponen penerima cahaya ini dapat
dibangun dengan dasar komponen phototransistor. Phototransistor
merupakan suatu transistor yang peka terhadap cahaya. Suatu sumber
cahaya menghasilkan energi panas, begitu pula dengan spektrum infra
merah. Karena spekrum infra mempunyai efek panas yang lebih besar
dari cahaya tampak, maka phototransistor lebih peka untuk
menangkap radiasi dari sinar infra merah.
Gambar 2.18 Skematik optocoupler Sumber Gambar :
http://www.utopiamechanicus.com/article/arduino-photo-interruptor-slotted-optical-switch/2/
2.4 Liquid Crystal Display (LCD)
Gambar 2.19 LCD 16 X 2 Sumber Gambar :
http://www.instructables.com/id/Interfacing-16x2-LCD-with-msp430-launchpad-in-8-bi/
Adapun fitur yang disediakan oleh LCD adalah : a. Terdiri dari 16 karakter dan 2 baris.
Gambar 2.20 Skematik LCD 16 X 2 Sumber Gambar :
http://www.gadgetronicx.com/lcd-interface-with-atmega32-avr/
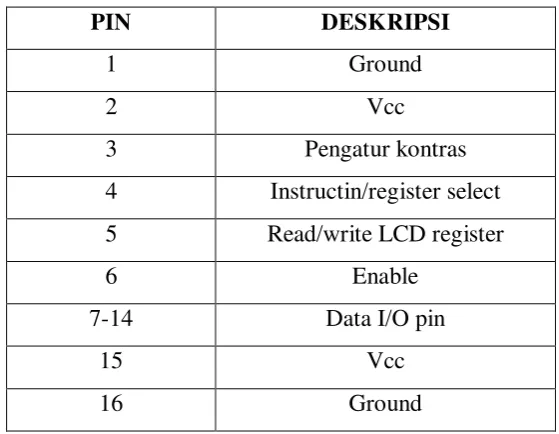
Tabel 2.2 spesifikasi kaki LCD 16 x 2
PIN DESKRIPSI
1 Ground
2 Vcc
3 Pengatur kontras
4 Instructin/register select 5 Read/write LCD register
6 Enable
7-14 Data I/O pin
15 Vcc
2.5 Cara kerja sensor pada alat
Sensor terdiri dari dua bagian yaitu pengirim (transmitter) dan penerima (receiver). Pada bagia pengirim dari alat penghiutng bibit ikan ini adalah infrared LED dan phototransistor sebagai penerima cahaya infrared tersebut pada bagian penerima dari sensor.
Cara kerjanya adalah jika bibit ikan masuk dan melewati pipa akrilik maka secara otomatis ikan akan menutupi cahaya inframerah yang dipancarkan infrared LED kepada phototransistor, maka jumlah bibit ikan pada tampilan LCD bertambah, yang membuat jumlah ikan pada tampilan LCD berubah yaitu adanya perubahan kondisi dari adanya cahaya inframerah yang diterima phototransistor menjadi tidak adanya cahaya yang diterima oleh phototransistor. Kondisi inilah yang diterapkan dalam program arduino yang merupakan otak dari alat penghitung bibit ikan ini.
Secara garis besar cara kerjanya adalah jika cahaya inframerah terhalang oleh bibit ikan maka sensor akan mengirim sinyal atau data ke arduino, dan arduino akan mengolah data dan akan dikirim ke LCD untuk ditampilkan.
Desain Alat Sebelumnya
Keterangan Alat :
A merupakan sisi miring akuarium berfungsi agar ikan dapat masuk dalam lubang tempat jatuhnya ikan
B merupakan lubang-lubang tempat jatuhnya ikan menuju selang flexibel C merupakan sudut selang membentuk setengah lingkaran
D merupakan selang air flexible sebagai jalur keluarnya ikan yang nantinya akan di hubungkan ke sensor
E merupakan tempat diletakkannya sensor
F merupakan pipa kaku untuk tempat mengalirnya air dari pompa ke wadah masuknya ikan
H merupakan akuarium secara keseluruhan sebagai alat mekanik yang bentuknya tidak seperti akuarium pada umumnya tetapi didesain khusus I merupakan tempat rangkaian elektronik
Desain Alat yang sekarang
Keterangan dari gambar desain mekanik di atas :
A = sisi miring dari akuarium yang bertujuan jika air di dalam akuarium semakin sedikit maka ikan yang ada di dalam akuarium akan masuk ke lubang pipa dimana sensor dipasang untuk proses selanjutnya yaitu perhitungan jumlah bibit ikan yang melewati sensor.
B = lubang persegi 3 x 3 cm. Lubang ini berfungsi untuk mengantar ikan ke pipa persegi yang dipasangi sensor untuk proses perhitungan.
menggunakan tiga sensor dengan tujuan meningkatkan akurasi perhitungan jumlah ikan yang melewati sensor.
D = pipa persegi 3x3 cm. Tiga sensor yang dijelaskan pada poin C di atas tadi diletakkan di pipa persegi ini dan pipa ini sekaligus melewatkan ikan-ikan yang sudah dihitung ke akuarium penampung berikutnya sementara porses perhitungan berlansung.
E = model akuarium mekanik secara keseluruhan tempat bibit-bibit ikan dimasukkan sebelum ikan dihitung. Model dari akuarium ini berbeda dari akuarium pada umumnya, akuarium ini didesain khusus agar ikan yang dimasukkan akan masuk ke pipa secara beraturan.
F = penyangga akuarium mekanik agar bisa diletakkan sesuai pada tempat yang diinginkan. Tujuan dari penempatan akuarium mekanik lebih tinggi dibanding akuarium penampung yaitu untuk mencegah kemungkinan ikan yang sama akan terhitung atau melewati sensor dua kali.
20
3.2 Perancangan
Perancangan merupakan suatu perencanaan, penggambaran, dan pembuatan sketsa atau pengaturan dari beberapa elemen yang terpisah ke dalam satu kesatuan yang utuh sehingga dapat berfungsi sebagaimana mestinya. Dengan adanya tahap perancangan ini diharapkan nantinya akan mempermudah dalam proses pembuatan alat penghitung bibit ikan ini.
3.2.1 Perancangan Alat Secara Umum
Pada tahap perancangan ini, ada tiga pokok tahap perancangan yang akan dilakukan dalam pembuatan alat penghitung bibit ikan ini yaitu tahap perancangan mekanik, perancangan elektronik, dan perancangan software. Tiga tahap pokok inilah yang nantinya akan menjadi sebuah alat yang mampu menghitung jumlah ikan yang lewat melalui pipa yang dipasangi sensor dan ditampilkan melalui LCD.
Gambar 3.2 Gambaran secara umum perancangan alat
Gambar 3.2 merupakan proses perancangan alat penghitung bibit ikan yang akan dibuat. Tiga perancangan pokok diatas yang akan disusun dalam satu alat dan penjelasan dari masing-masing diagram di atas adalah sebagai berikut :
1. Perancangan mekanik adalah perancangan model secara kesluruhan dari alat penghitung bibit ikan ini, perancangan wadah dimana ikan akan diproses sebelum dan sesudah dihitung.
3. Perancangan software bertujuan untuk menentukan jumlah ikan yang lewat melalui pipa dengan program counter.
3.2.2 Proses Perancangan Mekanik
Gambar 3.3 Blok Diagram Mekanik Alat
Blok diagram di atas merupakan mekanik alat penghitung bibit ikan yang akan dibuat. Blok diagram mekanik di atas dirancang sedemikian rupa agar ikan masuk ke pipa sacara beraturan dan wadah penampung akan diletakkan lebih rendah dari akuarium mekanik agar ikan yang sama tidak akan terhitung dua kali. Dari blok diagram diatas terdapat komponen-komponen sebagai berikut :
Akuarium mekanik yaitu akuarium yang bentuknya tidak seperti akuarium pada umumnya. Akuarium mekanik ini adalah wadah bibit ikan pertama sebelum ikan dihitung. akuarium ini didesain secara khusus untuk semudah mungkin agar bibit-bibit ikan masuk ke pipa secara beraturan dan melewati sensor yang akan ditampilkan pada LCD.
Pipa yang fungsinya melewatkan ikan pada sensor yang terpasang di ujung pipa itu sendiri.
Gambar 3.4 Desain akuarium mekanik Keterangan dari gambar desain mekanik di atas :
A = sisi miring dari akuarium yang bertujuan jika air di dalam akuarium semakin sedikit maka ikan yang ada di dalam akuarium akan masuk ke lubang pipa dimana sensor dipasang untuk proses selanjutnya yaitu perhitungan jumlah bibit ikan yang melewati sensor.
B = lubang persegi 3 x 3 cm. Lubang ini berfungsi untuk mengantar ikan ke pipa persegi yang dipasangi sensor untuk proses perhitungan.
C = lubang dengan diameter 4,5 mm. Lubang ini adalah lubang dimana sensor akan dipasang. Ada tiga lubang pada pipa persegi ini karena akan menggunakan tiga sensor dengan tujuan meningkatkan akurasi perhitungan jumlah ikan yang melewati sensor.
melewatkan ikan-ikan yang sudah dihitung ke akuarium penampung berikutnya sementara porses perhitungan berlansung.
E = model akuarium mekanik secara keseluruhan tempat bibit-bibit ikan dimasukkan sebelum ikan dihitung. Model dari akuarium ini berbeda dari akuarium pada umumnya, akuarium ini didesain khusus agar ikan yang dimasukkan akan masuk ke pipa secara beraturan. F = penyangga akuarium mekanik agar bisa diletakkan sesuai pada
tempat yang diinginkan. Tujuan dari penempatan akuarium mekanik lebih tinggi dibanding akuarium penampung yaitu untuk mencegah kemungkinan ikan yang sama akan terhitung atau melewati sensor dua kali.
G = akuarium atau wadah penampung sementara selama proses pehitungan berlansung setelah ikan dihitung. Model dari akuarium ini sama dengan model akuarium pada umumnya karena fungsinya hanya untuk menampung ikan sementara proses perhitungan berlansung.
3.2.2.1Akuarium
Gambar 3.5 Akuarium mekanik
Gambar 3.6 Desain dengan satu lubang pipa
Gambar 3.7 Desain akuarium dengan tiga lubang pipa
Setelah dilakukan percobaan dengan tiga lubang pipa seperti di atas, ternyata hasil percobaan yang didapat cukup memuaskan dengan jumlah ikan yang banyak ikan begitu cepat masuk ke lubang pipa dengan dorongan arus air yang tuangkan berkali-kali ke dalam akuarium penampung.
Dengan menuangkan air berkali-kali ke dalam akuarium maka desain di atas masih memiliki banyak kekurangan, untuk meminimalisir kekurangan yang ada, maka desain dilakukan perbaikan lagi dengan penambahan sebuah lubang di bagian belakang akuarium sebagai pintu masuk air yang nantinya akan mendorong ikan masuk ke dalam lubang pipa, seperti yang diperlihatkan pada gambar di bawah.
Dengan menambahkan lubang dibagian belakang akuarium dengan harapan air akan slalu bersirkulasi dan air tersebut yang akan mendorong ikan masuk ke lubang pipa yang dipasang sensor.
3.2.2.2Pipa akrilik
Pipa ini dibuat dari bahan akrilik 2 mm. Alat ini menggunakan tiga pipa dan tiga buah sensor yang dipasang pada masing-masing pipa. Sensor yang digunakan adalah sensor dengan prinsip kerja optocoupler dimana terdiri dari IR LED dan phototransistor yang pemasangannya harus tegak lurus untuk menjaga nilai ADC tetap tinggi yang nantinya akan sangat berpengaruh pada proses perhitungan nanti. Karena itulah kenapa pipa akrilik ini lebih efisien digunakan dialat ini dibanding dengan pipa model biasa (bulat).
Dalam pembuatan pipa ini, panjang dari masing-masing sisi yang membentuk pipa ini harus benar-benar diperhatikan yang nantinya akan akan disesuaikan dengan besar bibit ikan yang akan digunakan. Model pipa ini dirancang khusus untuk melewatkan ikan pada sensor dengan ujung yang lebih kecil agar ikan lewat pipa dan terdeteksi oleh sensor.
Awalnya model pipa akrilik ini dibuat persegi dengan panjang masing-masing sisi 3cm dengan panjang 5cm, seperti yang diperlihatkan pada gambar dibawah.
Desain pertama yang terpikir adalah dengan model persegi dengan panjang sisi masing-masing 3cm dengan panjang 5cm yang nantinya akan dipasangi sensor sejajar sebanyak 3 sensor. Dengan model ini setelah dilakukan percobaan yang terjadi adalah ikan melewati pipa akrilik dan akan menutupi sensor 1, 2, atau sensor 3. Yang menjadi permasalahan pada pipa model persegi dengan tiga sensor ini adalah satu ekor ikan dapat terbaca dua kali oleh sensor jika kondisi pertama ikan menutupi sensor sebanyak 2 sensor, jika ikan tersebut bergeser atau menggoyangkan ekornya ke sensor 3 maka alat akan mendeteksi dua ikan.
Karna adanya permasalahan diatas maka dilakukan perbaikan desain pada model pipa dan jumlah sensor yang dipasang pada pipa seperti pada gambar dibawah.
Gambar 3.10 Desain pipa dengan satu lubang sensor
Setelah dilakukan percobaan dengan pipa model ini, didapat sebuah permasalahan masih ada ikan yang melewati sensor tanpa terdeteksi karena ikan melewati pipa dengan cara miring bukan berdiri sehingga ikan tidak menutupi cahaya infrared yang diterima phototransistor.
Dari permasalahan di atas, desain di atas dilakukan perbaikan dari segi luas penampang ujung pipa yang awalnya 1,5cm menjadi 1cm. Untuk lubang sensor tidak dipakai lagi karna sensor akan dibuat sistem bongkar pasang. Sistem bongkar pasang ini juga mendatangkan keuntunga yaitu sensor yang tadinya bersentuhan lansung dengan air menjadi tidak lagi bersentuhan dengan air. Gambar dibawah ini menunjukkan model pipa dengan luas penampang ujung pipa 1cm tanpa lubang sensor.
Gambar 3.11 desain pipa tanpa lubang untuk menghindari sensor terkena air.
3.1.2.3 Akuarium Penampung
umumnya karena fungsinya hanya untuk menampung bibit ikan sementara setelah ikan dihitung selama proses perhitungan berlansung.
Gambar 3.12 Akuarium penampung
3.2.3 Proses Perancangan Elektronik
Salah satu poin utama dalam pembuatan alat penghitung bibit ikan ini yaitu proses perancangan elektronik. Setelah melewati tahap perancangan mekanik dari alat ini, kita diharuskan merancang bagian elektronika dari alat ini untuk mempermudah pembuatan alat nantinya.
Dalam perancangan elektronik ini dibutuhkan beberapa komponen elektronika seperti :
Board arduino Sensor optocoupler
LCD (Liquid Crystal Display)
3.2.3.1Board Arduino
Pada tahap perancangan elektronik ini, boar arduino disini merupakan komponen utama dari perancangan elektronik karena arduino disini merupakan otak dari elektronika maupun dari alat penghitung binit ikan ini. Boar arduino yang digunakan disini adalah boar arduino mega 2560.
Arduino tipe mega 2560 ini adalah tipe arduino yang memiliki pin paling banyak dibanding dengan arduino jenis lain sehingga kita tidak perlu khawatir akan kekurangan pin dalam pembuatan alat ini.
3.2.3.2Sensor Optocoupler
Untuk dapat menghitung jumlah ikan, alat ini membutuhkan sebuah sensor yang dapat mengirim data yang akan diolah oleh arduino. Sensor yang digunakan pada alat ini adalah sensor optocoupler.
Sensor optocoupler terdiri dari pengirim dan penerima. IR LED adalah sebuah komponen yang berfungsi sebagai pengirim pada sensor optocoupler ini, dan phototransistor adalah sebuah komponen elektronika yang berfungsi sebagai penerima pada sensor optocoupler ini.
Untuk mendapatkan nilai ADC yang maksimal, posisi IR LED harus benar lurus dengan phototransistor. Nilai ADC inilah yang nantinya akan sangat berpengaruh pada proses perhitungan jumlah ikan nantinya, karena nilai ADC inilah yang berfungsi sebagai masukan data ada atau tidak adanya ikan yang lewat pada pipa.
3.2.3.3Liquid Crystal Display
Untuk dapat mengetahui jumlah ikan yang melewati sensor dibutuhkan sebuah komponen elektronika yang dapat menampilkan jumlah ikan. Liquid crystal display adalah salah satu komponen elektronia yang berfungsi sebagai tampilan suatu data, baik karakter maupun grafik.
LCD yang digunakan pada alat ini adalah LCD dengan karakter 16x2, maksudnya adalah ada 16 baris disetiap kolomnya dan ada 2 kolom. LCD inilah yang berfungsi menampilkan jumlah ikan yang melewati sensor.
3.2.4 Perancangan Software
jumlah ikan yang melewati sensor . pemrograman perangkat lunak pada alat ini menggunakan pemrograman bahasa arduino dengan software arduino itu sendiri.
3.3 Pembuatan
Tahap pembuatan adalah tahap realisasi dari tiap-tiap perancangan yang telah dibuat, perancangan-perancangan yang telah dibuat kemudian direalisasikan satu persatu sehingga dapat memudahkan dalam proses pembuatan. Menyediakan alat dan bahan terlebih dahulu adalah langkah yang sangat penting dalam membuatan suatu alat, alat dan bahan yang dibutuhkan dalam pembuatan alat penghitung bibit ikan ini adalah sebagai berikut :
3.2.1 Alat
Alat-alat yang diperlukan dalam pembuatan alat penghitung bibit ikan ini adalah sebagai berikut :
PC/Leptop
Drilling set (mata bor) Cutter
Breadboarg 3.3.1 Bahan
Bahan-bahan yang dibutuhkan dalam pembuatan alat penghitung bibit ikan ini adalah sebagai berikut :
Akrilik 2 mm
Kabel jumper male to male Kaber jumper male to female Kabel jumper female to female Konektor header
Pin header
Dan beberapa komponen pendukung seperti resistor dan potensiometer
3.3.2 Pembuatan Hardware
Tahap pembuatan hardware merupakan tahap pembuatan prangkat keras dari alat penghitung bibit ikan ini. Tahap pembuatan hardaware ini meliputi pembuatan mekanik dan pembuatan rangkaian elektronik dari alat ini.
3.3.2.1Pembuatan Mekanik
Tahap pembuatan mekanik ini melalui beberapa tahapan, diantaranya adalah :
dengan harapan hasil pemotongan akan lebih rapi. Alasan lain penulis menggunkan jasa pemotong akrilik dengan laser adalah adalah akrilik yang akan dipotong desainnya cukup rumit sehingga kalau menggunakan alat pemotong manual akan susah.
b. Merangkai sekaligus mengelem potongan-potongan akrilik sesuai dengan desain yang telah dibuat pada tahap perancangan sebelumnya. c. Pembuatan pipa berbentuk persegi dengan ukuran sisi 3 cm, akrilik
yang sudah dipotong sesuai ukuran dirangkai dan dilem sehingga membentuk pipa persegi dengan lubang diameter 4.5 mm tempat sensor akan dipasang.
d. Setelah akuarium mekanik jadi dan pipa persegi juga sudah jadi, pipa dipasang pada lubang dibagian depan akuarium tempat ikan masuk melewati sensor.
e. Pembuatan akuarium penampung, pembuatan akuarium penampung ini menggunakan jasa orang yang bergerak dibidang pembuatan akuarium. Bahan yang digunakan untuk pembuatan akuarium penampung ini adalah bahan kaca dengan ketebalan 5mm. Ukuran dari wadah penampung pada alat ini adalah panjang 60 cm, lebar 40 cm, dan tinggi 40 cm.
f. Pengaturan posisi akuarium mekanik harus lebih tinggi tempatnya dibanding dengan akuarium penampung unutk menghindari ikan yang sama akan melewati sensor dua kali.
Tahap pembuatan mekanik dari alat penghitung bibit ikan ini merupakan salah satu bagian penting dari pembuatan alat ini, karena bagian mekanik inilah yang akan menentukan ikan akan masuk ke lubang pipa secara berurutan atau dengan cara bersamaan.
dikatakan gagal, sehingga rancangan mekanik alat ini masih perlukan dilakukan perbaikan.
Gambar 3.13 Akuarium mekanik alat dari depan
Gambar 3.14 Akuarium mekanik alat dari samping
dengan cara bersamaan, dan cara ikan masuk ke lubang pipa adalah kunci utama dari perhitungan jumlah ikan.
Gambar 3.15 Akuarium penampung ikan
Akuarium penampung ikan ini merupakan wadah dimana ikan akan dikaratina untuk sementara waktu selama proses perhitungan berlansung. Bagian ini juga memiliki peran yang penting pada alat ini karena bagian ini adalah bagian yang membuat suatu kondisi dimana ikan yang sama tidak akan kembali melewati sensor untuk kedua kalinya.
3.3.2.2Pembuatan Rangkaian Elektronik
Tahap pembuatan rangkaian elektronik ini dimulai dari pembuatan jalur pada PCB. Teknik pembuatan jalur pada pcb yang diterapkan adalah teknik transfer paper. Teknik ini merupakan suatu teknik pembuatan jalur pada PCB yang ekonomis tapi tidak mengesampingkan kualitas. Langkah-langkah prmbuatan jalur pada PCB dengan teknik transfer paper adalah : Print layout PCB dengan mengunakan kertas ap120, karena kterbatasan
alat dan bahan penulis menggunakan jasa percetakan untuk printout layout PCB ini.
maka jalur yang menempel pada PCB akan melebar dari aslinya. Jika jalur melebar akan membuat jalur-jalur yang jaraknya berdekatan akan menempel. Contohnya kaki-kaki konektor header akan menjadi satu atau nyambung, hal ini bisa mengakibatkan short circuit (hubung singkat) pada alat atau bisa merusak komponen-komponen pada alat tersebut.
Setelah disetrika kertas didiamkan selama beberapa menit sampai permukaan kertas dan PCB tidak panas lagi, baru selanjutnya kertas bisa dilepas dari permukaan PCB dengan cara hati-hati. Untuk mempermudah melepas kertas dari permukaan PCB, kertas dan PCB bisa direndam dengan air sampai kertas sudah kelihatan basah. Langka selanjutnya adalah menggosok halus permukaan PCB dengan tangan, menggosok PCB harus sangat hati-hati karena tinta yang menempel sifatnya mudah luntur.
Setelah tinta menempel sempurna pada permukaan PCB, langkah selanjutnya adalah melarutkan PCB menggunakan larutan dan akan menyisaka logam pada bagian yang ada tintanya tadi. Untuk mempercepat proses pelarutan wadah larutan bisa digoyang-goyangkan secara horizontal (kiri kanan)
Setelah layout jadi, langkah selanjutnya adalah tahap pengeboran. Melubangi titik-titik tertentu dengan menggunakan bor listrik yang nantinya lubang-lubang ini adalah tempat komponen diletakkan.
Setelah PCB dilubangi, langkah selanjutnya adalah memasang komponen sekaligus kaki-kakinya disolder dengan menggunakan solder listrik.
Gambar 3.17 Sambungan komponen-komponen pada aplikasi ISIS
3.3.2.3Pembuatan Program
Tahap ini merupakan tahap realisasi dari flowchart yang telah dibuat sebelumnya, program yang dibuat adalah program counter denga bahasa pemrograman arduino. Program ini berfungsi untuk menggerakkan arduino sebagai otak dari alat ini berfungsi sebagai mana mestinya, yaitu menghitung jumlah ikan yang melewati sensor.
Berikut adalah program yang diterapkan pada arduino dengan program counter beserta penjelasannya.
#include <LiquidCrystal.h>
LiquidCrystal lcd(12, 11, 7, 6, 5, 4); // pin-pin yang terhubung dengan pin pada lcd
int sensorPin1 = 0; // pin seosor 1 terhubung dengan pin analog 0 pada arduino
int sensorPin2 = 1; // pin sensor 2 terhubung dengan pin analog 1 pada arduino
int sensorPin3 = 2; // pin sensor 3 terhubung dengan pin analog 2 pada arduino
int value2 = 0; // untuk menampilkan nilai ADC sensor 2 int value3 = 0; // untuk menampilkan nilai ADC sensor 3
boolean ikanLewat = false; // untuk menciptakan suatu kondisi dimana ikan sudah lewat trus disalahkan agar counter tidak bertambah terus
void setup() { lcd.begin(16, 2);
lcd.setCursor(0,0); // pengaturan kursor pada baris ke 0 kolom ke 0 lcd.print("Jumlah Ikan : "); // tampilan LCD
Gambar 3.18 Alat penghitung bibit ikan
43
Prinsip kerja alat meliputi sistem kerja dari bagian-bagian alat penghitung bibit ikan otomatis ini. Bagian-bagian tersebut adalah :
Prinsip kerja alat mekanik Prinsip kerja sensor optocoupler Pengoprasian alat
Poin-poin di atas merupakan bagian-bagian yang menyusun alat secara umum yang akan dijelaskan lebih ksusus lagi pada poin selanjutnya di bawah ini.
4.1.1 Prinsip Kerja Alat Mekanik
Untuk mempermudah penjelasan terhadap prinsip kerja mekanik dari alat penghitung bibit ikan ini, perhatikan gambar di bawah ini :
Dari gambar di atas akan lebih mudah untuk memahami prinsip kerja dari makanik alat penghitung bibit ikan ini. Ikan akan dituangkan ke akuarium mekanik (akuarium atas) secara bertahap dan pelan untuk memperkecil kemunginan ikan masuk lubang dengan cara bersamaan. Setelah ikan dituangkan, ikan akan mengikuti aliran arus air masuk ke lubang pipa persegi dan akan melewati sensor, selanjutnya ikan akan jatuh ke akuarium penampung (akuarium bawah) sementara proses perhitungan berlansung.
4.1.2 Prinsip Kerja Sensor Optocoupler
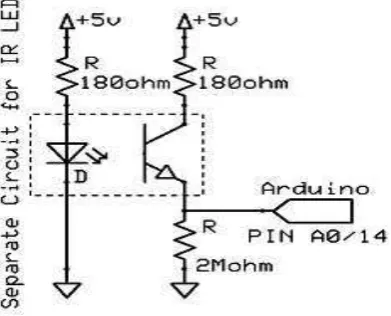
Sensor optocoupler disini berfungsi sebagai saklar atau swicth yang akan memicu bertambahnya jumlah ikan yang ditampilkan LCD. Prinsip kerjanya adalah jika cahaya inframerah terhalang oleh ikan yang lewat, maka nilai ADC dari sensor akan menjadi kecil, berkisar antara 0-20 saja, jika tidak ada ikan di depan sensor atau ikan sudah melewati sensor maka nilai ADC sensor akan bernilai besar yaitu antara 100-500.
Sebenarnya nilai ADC pada sensor optocoupler ini bisa mencapai 900-1024, tapi karena adanya jarak antara transmitter (pengirim) dan receiver (penerima) sejauh 3 cm dan posisi pengirim dan penerima yang tidak lurus maka nilai ADC yang didapat tidak maksimal.
ditambah satu dan jika bolean bernilai salah maka jumlah ikan tetap.
Gambar 4.2 Rangkain sensor optocoupler 4.1.3 Pengoprasian Alat
Untuk mempermudah pemahaman terhadap prinsip kerja rangkain secara keseluruhan dari alat penghitung bibit ikan ini perhatikan gambar dibawah :
Pengoprasian alat penghitung bibit ikan ini meliputi bagaimana cara mengoprasikan alat secara keseluruhan agar nantinya dapat berfungsi bagaimana mestinya. Berikut adalah langkah-langkah untuk mengoprasikan alat penghitung bibit ikan yang telah dibuat :
Akuarium mekanik posisinya diletakkan lebih tinggi dari akuarium penampung
Rangkaian elektronik alat diletakkan dibagian depan akuarium mekanik dengan sedikit pelindung dari percikan air dari bahan akrilik
Sambungkan adaptor dengan arduino sebagai tanda saklar on dan LCD menampilkan angka NOL.
Ikan akan dituangkan kedalam akuarium mekanik dan ikan akan masuk ke lubang pipa bersama air yang mengalir dalam akuarium, sensor akan mendeteksi jumlah ikan yang lewat dan ditampilkan di LCD.
Setelah perhitungan selesai, tekan tombol reset yang tersedia di aduino untuk memulai perhitungan dari awal lagi.
4.2 Uji Coba
Tujuan dari uji coba dari alat ini adalah untuk mengukur sampai mana keberhasilan penulis dalam membuat alat penghitung bibit ikan ini, sehingga dari hasil uji coba ini sampai mana optimalnya alat ini bekerja. Dalam tahap ini, yang diuji coba dari alat ini adalah :
Uji coba alat mekanik Uji coba hardware
4.2.1 Uji Coba Alat Mekanik
Uji coba alat mekanik ini dilakukan dengan tujuan untuk mengetahui apakah alat mekanik ini sudah bekerja sesuai dengan benar atau belum. Fungsi dari akuarium mekanik ini adalah agar ikan semudah mungkin untuk masuk lubang pipa dan melewati sensor dan sebisa mungkin ikan masuk lubang pipa secara beraturan satu persatu.
Untuk melakukan pengujian pada mekanik alat ini tidak memerlukan bibit ikan, karena yang dibutuhkan hanya mengalirkan air ke dalam akuarium, jika air mengalir secara sempurna melalui lubang pipa dan bagian-bagian mekanik tidak ada kebocoran air maka bisa dikatakan tujuan dari mekanik alat ini tercapai dan bisa dikatakan berhasil. Di bawah ini gambar proses pengujian mekanik alat dengan dialiri air pada akuarium mekanik :
4.2.2 Uji Coba Hardware
Untuk mencapai tujuan dari pembuatan alat penghitung bibit ikan ini, tahap uji coba hardware ini terbilang penting dalam tujuan pembuatan alat ini. Tahap ini yang akan menentukan counter (pencacah) dari jumlah ikan yang akan melewati sensor. Uji coba hardware ini meliputi beberapa tahapan yaitu sebagai berikut :
Pengujian transmitter sensor Pengujian receiver sensor Pengujian rangkaian sensor
Pengujian hardware secara keseluruhan, penjelasan secara khusus dari masing-masing tahapan di atas adalah sebagai berikut :
4.2.2.1 Pengujian Transmitter sensor
Tahap uji coba bagian pengirim sensor ini dilakukan dengan cara melihat IR LED dengan kamera digital. Karena cahaya inframerah tidak dapat dilihat oleh mata telanjang, untuk itulah penulis menggunakan kamera digital untuk melihat bagian pengirim bekerja atau tidak. IR LED yang sudah dirancang sebelumnya pada PCB diberi suplay tegangan dan dilihat dari kamera digital apakah IR LED sudah bekerja sesuai dengan yang difungsikan.
4.2.2.2 Pengujian Receiver sensor
Tahap uji coba bagian penerima sensor ini dilakukan dengan cara memantau nilai ADC pada serial monitor. Nilai ADC ini didapat dari cahaya inframerah yang dipancarkan oleh IR LED pada bagian pengirim dan diterima oleh bagian penerima sensor yaitu phototransistor.
Prinsip kerjanya adalah memanfaatkan cahaya inframerah sebagai penghantar energi seperti dijelaskan di atas. Keluaran dari sensor ini adalah berupa tegangan dan akan diolah oleh arduino sehingga didapatkan nilai ADC yang ditampilkan pada serial monitor.
4.2.2.3 Pengujian Rangkaian Sensor
Tahap pengujian sensor secara keseluruhan ini dapat dilihat pada perubahan nilai ADC pada serial monitor. Sensor dapat dikatakan bekerja sesuai fungsinya jika nilai ADC di serial monitor berubah. Jika bagian pengirim dan penerima sensor tidak terhalang benda maka nilai ADCnya tinggi, dan jika pengirim dan penerima sensor terhalang benda maka nilai ADCnya kecil.
Nilai ADC yang kecil dan ada penghalang antara pengirim dan penerima sensor diasumsikan ada ikan lewat, dan ini dijadikan sebagai saklar swicth untuk counter. Posisi pengirim (IR LED) dengan penerima (phototransistor) harus benar-benar lurus dan sejajar dengan tujuan untuk mendapatkan nilai ADC yang optimal. 4.2.2.4 Pengujian Hardware Secara Keseluruhan
dikatakan berhasil jika pengirim dan penerima sensor terhalang ikan maka counter nambah (jumlah ikan yang ditampilkan LCD).
Dalam program yang sudah dibuat sbelumnya dalam software arduino ditulis bahwa jika nilai ADC sama dengan atau kurang dari 20 maka counter bertambah satu (if value <= 20). Maksudnya adalah jika ikan sedang melewati sensor, kondisi ini berarti bagian pengirim dan penerima sensor sedang terhalang oleh ikan yang sacara otomatis membuat nilai ADC kecil yaitu dibawah 20, maka counter bertambah satu, perubahan nyata yang dapat dilihat pada alat yaitu perubahan jumlah angka yang ditampilkan oleh LCD yang menunjukan jumlah ikan yang melewati sensor.
Gambar 4.5 Contoh tampilan nilai ADC
Pengujian ini dilakukan dengan menggunakan bibit ikan yang akan dihitung jumlahnya. Ikan akan dituangkan ke dalam akuarium dengan perlahan agar ikan masuk ke lubang pipa secara berurutan satu persatu. jika ikan melewati sensor dan jumlah ikan pada LCD bertambah maka tujuan pembuatan hardware alat ini tercapai.
4.3 Pengujian Alat Secara Keseluruhan
Pengujian alat secara keseluruhan meliputi pengujian mekanik, elektronik, dan hardware alat penghitung bibit ikan ini. Keberhasilan dari alat ini ditentukan oleh tahap pengujian ini. Alat ini akan dikatakan berhasil jika tujuan yang hendak dicapai terpenuhi, tujuan dari pembuatan alat ini adalah membuat suatu alat yang dapat menghitung jumlah bibit ikan dan memperbaiki akurasi perhitungan alat yang telah dibuat pada skripsi sebelumnya.
Gambar 4.6 Tampilan awal LCD pertama kali alat dinyalakan Jumlah ikan di LCD akan terus bertambah seiring dengan banyaknya ikan yang melewati sensor yang terpasang pada pipa. Gambar 4.7 di bawah menunjukan jumlah ikan yang melewati sensor :
Gambar 4.7 Tampilan jumlah ikan pada LCD
Tabel di bawah akan menunjukkan hasil dari percobaan alat penghitung bibit ikan otomatis. Data di bawah menunjukan pengujian akurasi perhitungan alat penghitung bibit ikan otomatis.
Tabel 4.1 Pengujian akurasi perhitungan alat penghitung bibit ikan otomatis.
Jumlah ikan yang dimasukkan :
Tampilan jumlah ikan di LCD :
Persentase akurasi perhitungan alat :
10 10 100%
10 10 100% dihitung dengan menggunakan rumus jumlah ikan yang ditampilkan oleh LCD dikurangi dengan jumlah ikan yang masukkan ke dalam alat, hasilnya dibagi dengan jumlah ikan yang dimasukkan ke alat dan dikali seratus, maka didapat nilai persentase erornya, contoh perhitungannya di perlihatkan pada percobaan kelima, perhitungannya seperti dibawah ini :
=
Dari hasil percobaan di atas didapat nilai persentase eror rata-rata sebesar 98,81%, akurasi perhitungan alat ini jauh lebih akurat jika dibanding dengan nilai rata-rata yang didapat pada alat yang sbelumnya yaitu 93,4%.
Perbandingan akurasi perhitungan alat pada skripsi sebelumnya dan yang sekarang diperlihatkan pada tabel 4.2 dibawah.
Jumlah ikan yang dimasukkan :
Jumlah ikan pada LCD Alat sebelumnya Alat sekarang
Tabel diatas membuktikan bahwan akurasi perhitungan alat yang sekarang lebih akurat dibanding dengan perhitungan alat pada skripsi sebelumnya, dengan adanya penongkatan akurasi perhitungan jumlah bibit ikan ini yang awalnya 93,4% meningkat menjadi 98,81% maka tujuan dari pembuatan skripsi tercapai.
56
Dari hasil perancangan, pembuatan dan percobaan pada bab-bab sebelumnya, didapat beberapa kesimpulan diantaranya adalah :
1. Alat ini mampu menghitung bibit ikan dengan akurat yaitu sebesar 98,81%.
2. Alat ini merupakan pengembangan dari alat sebelumnya dari segi mikrokontroler yang digunakan sebagai otak dari sistem ayau alat, desain, ukuran, kelipatan perhitungan ikan dari klipatan satu menjadi klipatan tiga, dan yang paling penting adalah peningkatan akurasi perhitungan jumlah bibit ikannya.
3. Akurasi perhitungan jumlah bibit ikan pada alat ini sangat tergantung pada cara memasukkan ikan ke dalam wadah.
4. Dengan adanya peningkatan akurasi perhitungan jumlah bibit ikan dari alat sebelumnya dengan yang sekarang yaitu dari 93,4% menjadi 98,81% maka tujuan dari pembuatan skripsi ini tercapai.
5.2 Saran
Selama proses perancangan, pembuatan dan pengujian alat ini, masih terdapat banyak kekurangan yang perlu dilakukan perbaikan oleh penelitian-penelitian selanjutnya untuk menciptakan alat yang lebih baik, saran yang dapat diberikan antara lain :
1. Perlu penelitian lebih lanjut mengenai desain mekanik alat, karena pada alat ini ketika jumlah ikan sudah mulai sedikit ikan kadang-kadang susah untuk masuk ke lubang pipa sehingga perlu bantuan manual.
Muhammadiyah Yogyakarta
Kadir Abdul, 2014 dalam sebuah buku yang berjudul Arduino