1
PENDAHULUAN
Latar Belakang 1.1
Seiring perkembangan teknologi yang semakin maju, teknologi robot
merupakan alat yang dapat digunakan sebagai alat bantu manusia di kehidupan
kita sehari-hari. Berbagai robot canggih, sistem keamanan rumah, telekomunikasi,
dan sistem komputer banyak menggunakan mikrokontroler sebagai unit
pengontrol utama. Tentunya hal ini dimaksudkan untuk lebih mempermudah
manusia untuk melakukan pekerjaan atau aktivitasnya sehari-hari. Belakangan ini
robot mulai memasuki pasaran konsumen di bidang alat bantu rumah tangga,
seperti penyedot debu (vacuum cleaner) otomatis.
Robot vacuum cleaner otomatis adalah robot pembersih lantai yang dapat
membersihkan suatu ruangan tanpa dikendalikan oleh manusia. Kegunaan dari
robot tersebut bukan hanya mampu untuk menghisap debu tapi juga
membersihkan lantai karena dilengkapi juga dengan sikat dan kain pembersih,
Robot akan kembali ke home dengan sendirinya, dan akan melakukan pengisian
battery. Robot ini sudah banyak diproduksi perusahaan-perusahaan besar Untuk
perbandingan robot yang sudah ada diproduksi bisa kita lihat di tabel 1.1 di bawah
Gambar 1. 1. Macam-macam Vacuum cleaner yang sudah diproduksi
Tabel 1. 1. Perbandingan robot yang sudah diproduksi
Sharp
RX-Ukuran 96x346 mm 92x340 mm 98x335mm 89x358mm
Berat 3300 gr 3600 gr 3400 gr 2994 gr
Karena ketertarikan saya melihat robot vacuum cleaner tersebut, saya akan membuat
vacuum cleaner otomatis pada tugas akhir saya. Tujuan dari penelitian ini adalah merancang
sistem robot penyedot debu yang mampu bergerak secara otomatis dan mampu melakukan
navigasi pada area terbuka, Selain mampu melakukan penyedotan debu, robot ini juga dirancang
melakukan navigasi sendiri. Kelebihan dari alat yang saya buat adanya sistem penyiram
Identifikasi Masalah 1.2
Masalah yang dihadapi dalam pembuatan vacuum cleaner otomatis ini adalah :
a. sistem pergerakan dari robot sehingga dapat menyusuri seluruh ruangan dengan baik dan
dapat kembali ke home,
b. penyedotan debu dan penyikatan lantai oleh vacuum cleaner sehingga ruangan dapat
dibersihkan dengan baik,
c. mendesain vacuum cleaner sedemikian rupa sehingga ukurannya tidak mengganggu
pergerakan vacuum cleaner.
Tujuan 1.3
Beberapa tujuan yang akan dicapai dari pembuatan tugas akhir ini diantaranya adalah sebagai
berikut:
a. membuat sistem pergerakan robot yang dapat membersihkan seluruh ruangan dan akan
kembali ke home setelah selesai melakukan penyusuran seluruh ruangan,
b. penyedotan debu dan penyikatan lantai oleh vacuum cleaner berjalan dengan baik,
c. membuat desain vacuum cleaner yang bentuk dan ukurannya tidak menganggu
pergerakan robot tersebut.
Batasan Masalah 1.4
Dalam melakukan suatu penelitian perlu adanya pembatasan masalah agar penelitian lebih
terarah dan memudahkan dalam pembahasan sehingga tujuan penelitian dapat tercapai. Beberapa
batasan yang digunakan dalam penelitian adalah sebagai berikut :
a. robot menggunakan mikrokontroler Arduino,
c. robot tidak mengetahui ketebalan debu.
d. Ruangan percobaan yang saya pakai hanya berukuran ±2x2m.
Metoda Penelitian 1.5
Metode penelitian yang dilakukan penulis adalah eksperimental dengan tahapan sebagai
berikut :
a. studi pustaka yang berkaitan dengan vacuum cleaner, lembar data sensor-sensor serta
manual mikrokontroller,
b. pemilihan dan pengadaan sensor, motor yang digunakan,
c. perancangan desain robot yang dapat memuat mikrokontroller, sensor-sensor dan motor,
d. pembuatan rangka dan rangkaian elektronik robot,
e. merancang perangkat lunak yang berfungsi untuk membangkitkan dan mengendalikan
gerakan robot secara keseluruhan,
f. menguji kinerja sistem secara keseluruhan serta mengambil data dari hasil perancangan,
g. menganalisa hasil dan membuat kesimpulan.
Sistematika Penulisan Laporan 1.6
Sistematika penulisan skripsi ini disusun untuk memberikan gambaran umum tentang
penelitian yang dijalankan. Sistematika penulisan skripsi ini adalah sebagai berikut.
Menguraikan latar belakang, identifikasi masalah, rumusan masalah, tujuan, batasan
masalah, kegunaan penelitian, metoda penelitian, dan sistematika penulisan laporan yang
digunakan dalam pembuatan laporan ini.
BAB II DASAR TEORI
Bab ini berisi tentang teori-teori penunjang yang berkaitan dengan masalah yang dibahas.
BAB III PERANCANGAN ALAT
Bab ini berisi tentang perancangan hardware maupun software dari sistem yang akan
dirancang.
BAB IV PENGUJIAN DAN ANALISIS
Bab ini berisi tentang hasil uji coba sistem, baik hardware maupun software secara
keseluruhan serta hasil analisanya.
BAB V PENUTUP
Bab ini berisi kesimpulan dari pembahasan serta analisa yang diperoleh, untuk
meningkatkan mutu dari sistem yang telah dibuat serta saran-saran untuk perbaikan dan
6
DASAR TEORI
Pada bab ini akan dijelaskan mengenai studi pustaka tentang robot dan
vacuum, teori-teori penunjang sistem baik perangkat keras (hardware), maupun
perangkat lunak (software), serta beberapa teori penunjang lainnya.
Sejarah Robot 2.1
Robot adalah sebuah alat mekanik yang dapat melakukan tugas fisik, baik
menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program
yang telah didefinisikan terlebih dulu (kecerdasan buatan). Istilah robot berasal
dari Czech, robota, yang berarti bekerja. Istilah itu diperkenalkan ke publik oleh
Karel Capek saat mementaskan Rossum’s Universal Robots (RUR) pada tahun
1921. Meskipun begitu, awal kemunculan robot sebetulnya dapat diurutkan dari
bangsa Yunani kuno yang membuat patung yang dapat dipindah-pindahkan.
Sekitar 270 BC, Ctesibus, seorang insinyur Yunani, membuat organ dan jam air
dengan komponen yang dapat dipindahkan. Al-Jajari (1136-1206), seorang
ilmuwan pada dinasti Artuqid, dianggap sebagai tokoh yang pertama kali
menciptakan robot humanoid yang berfungsi sebagai 4 musisi. Pada Tahun 1770,
Pierre Jacquet Droz, seorang pembuat jam berkebangsaan Swiss, membuat 3
boneka mekanis. Boneka-boneka itu dapat melakukan fungsi spesifik seperti
menulis, menggambar, memainkan musik dan organ. Pada tahun 1898 Nikola
Tesla membuat sebuah boat yang dikontrol melalui radio remote control, dan
didemokan di Madison Square Garden. Namun usaha untuk membuat autonomous
Jepang, pada tahun 1967, yang pada saat itu merupakan Negara yang baru
bangkit, mengimpor robot Versatran dari AMF. Kejayaan robot dimulai pada
tahun 1970 ketika Profesor Victor Scheinman dari Universitas Stanford
mendesain lengan standar. Terakhir, pada tahun 2000, Honda memamerkan robot
yang dibangun bertahun-tahun lamanya, yang diberi nama ASIMO, yang
kemudian disusul oleh Sony dengan robot anjing AIBO-nya.
Robot Mobile 2.2
Robot Mobile adalah konstruksi robot yang ciri khasnya adalah mempunyai
aktuator berupa roda untuk menggerakkan keseluruhan badan robot tersebut,
sehingga robot tersebut dapat melakukan perpindahan posisi dari satu titik ke titik
yang lain dengan bantuan navigasi dari sebuah sensor. Ada banyak navigasi yang
digunakan robot mobile, seperti yang akan dijelaskan dibawah ini.
Manual jauh atau tele-op 2.2.1
Sebuah robot manual tele-op benar-benar di bawah kendali seorang sopir
dengan joystick atau perangkat kontrol lainnya. Perangkat mungkin dihubungkan
langsung ke robot, mungkin joystick nirkabel, atau mungkin menjadi aksesori ke
komputer nirkabel atau pengendali lainnya. Sebuah robot tele-op biasanya
digunakan untuk menjaga operator dari bahaya. Contoh, robot remote manual
termasuk Robotika Design ANATROLLER ISPA-100, ISPA-50, Foster-Miller
Talon, iRobot's PackBot, dan KumoTek's MK-705 Roosterbot.
Guarded tele-op 2.2.2
Sebuah robot guarded tele-op memiliki kemampuan untuk merasakan dan
seperti robot di bawah manual tele-op. Jika ada beberapa robot mobile hanya
menawarkan guarded tele-op Sliding.
Next-line 2.2.3
Beberapa Automated awal Dipandu Kendaraan (AGVs) adalah baris berikut
mobile robot. Mereka mungkin mengikuti garis visual dicat atau tertanam di lantai
atau langit-langit atau sebuah kabel listrik di lantai. Sebagian besar robot
dioperasikan sederhana "menjaga garis di pusat sensor" algoritma. Mereka tidak
bisa mengelilingi hambatan, mereka hanya berhenti dan menunggu ketika sesuatu
menghalangi jalan mereka. Banyak contoh dari kendaraan tersebut masih dijual,
oleh Transbotics , FMC, Egemin, HK Systems dan perusahaan lainnya.
Robot Otonom acak 2.2.4
Otonomi robot dengan gerakan acak pada dasarnya terpental ke dinding,
baik dinding-dinding yang merasakan dengan bumper fisik seperti pembersih
Roomba atau dengan sensor elektronik seperti mesin pemotong rumput robotika
friendly. Algoritma sederhana bump dan putar 30° akhirnya mengarah ke
jangkauan sebagian besar atau seluruh permukaan lantai atau halaman.
Robot mobile ini sangat disukai bagi orang yang mulai mempelajari robot.
Hal ini karena membuat robot mobile tidak memerlukan kerja fisik yang berat.
Untuk dapat membuat sebuah robot mobile minimal diperlukan pengetahuan
Gambar 2. 1 Robot Mobile
Base robot mobile dapat dengan mudah dibuat dengan menggunakan
plywood /triplek, akrilik sampai menggunakan logam (aluminium). Robot mobil
dapat dibuat sebagai pengikut garis (Line Follower) atau pengikut dinding (Wall
Follower) ataupun pengikut cahaya.
Sejarah Robot Vacuum Cleaner 2.3
Robot pembersih pertama kali yang diproduksi adalah Electrolux Trilobite
oleh Swedia rumah tangga dan peralatan profesional produsen, Electrolux. Pada
tahun 1997, salah satu versi pertama Electrolux dari Trilobite vacuum ditampilkan
pada program sains BBC, Tomorrow’s World.
Pada tahun 2001, perusahaan teknologi Inggris, Dyson (perusahaan)
membangun dan menunjukkan robot vacuum yang dikenal sebagai DC06. Namun,
karena harga tinggi, itu tidak pernah dirilis ke pasar.
Gambar 2. 3Robot Vacuum DC06
Pada tahun 2002, perusahaan teknologi canggih Amerika, iRobot,
meluncurkan Roomba robot pembersih lantai. Awalnya, iRobot memutuskan
untuk memproduksi 15.000 unit dan 10.000 unit lebih tergantung pada
keberhasilan peluncuran. Roomba segera menjadi sensasi konsumen yang besar.
Sejak tahun 2002, variasi baru dari robot vacuum telah muncul di pasar. Sebagai
contoh, Canadian bObsweep robotic vacuum yang mempunyai pel dan
vacuum,atau Neato Robotika XV-11 robotic vacuum, yang menggunakan
laser-vision daripada model sensor ultrasound tradisional yang didasarkan. Pada tahun
2014, Dyson mengumumkan comeback-nya ke industri vakum robot dengan
Dyson 360 Eye. 360 mengacu pada kamera 3600 yang dipasang pada robot dan
seharusnya memberikan orientasi yang lebih baik saat membersihkan.
Ini adalah pendekatan yang berbeda untuk navigasi dan jalur temuan
dibandingkan dengan produk dari Neato Robotika atau iRobot. Robot vacuum
dijadwalkan hanya rilis di Jepang pada musim semi 2015, tetapi International
Launched diharapkan untuk mengikuti akhir tahun ini.
Mikrokontroler 2.4
Mikrokontroler adalah sebuah sistem microprocessor dimana di dalamnya
sudah terdapat CPU, ROM, RAM dan I/O, clock dan peralatan internal lainnya
yang sudah saling terhubung dan terorganisasi dengan baik oleh pabrik
pembuatnya dan dikemas dalam satu chip yang siap pakai. Sehingga kita tinggal
memprogram isi ROM sesuai aturan penggunaan oleh pabrik yang membuatnya.
Terdapat dua jenis mikrokontroler yang berkembang saat ini dan
masing-masing mempunyai keturunan/keluarga sendiri Hal ini didasarkan pada arsitektur
prosesor dan set intruksinya.
1. Reduced Instruction Set Computer (RISC) : instruksi terbatas tapi
memiliki fasilitas yang lebih banyak.
2. Complex Instruction Set Computer (CISC) : instruksi bisa dikatakan lebih
lengkap tapi dengan fasilitas secukupnya.
Arduino mega 2560 merupakan sebuah board mikrokontroler berbasis
Atmega2560. Modul ini memiliki 54 digital input/output dimana 14 digunakan
untuk PWM output dan 16 digunakan sebagai analog input, 4 port serial, 16 MHz
osilator Kristal, koneksi USB, power jack, ICISP Header, dan tombol reset.
Memiliki flash memory sebesar 256Kb sangat cukup untuk menampung program
Arduino mega 2560 tidak memerlukan flash program external karena di
dalam chip mikrokontroler Arduino telah diisi dengan bootloader yang membuat
proses upload program yang kita buat menjadi lebih sederhana dan cepat. Untuk
koneksi dengan computer sudah tersedia RS232 to TTL converter atau
menggunakan chip USB ke serial converter seperti FTDI FTD232.
Aktuator 2.5
Aktuator adalah elemen yang berfungsi mengkonversi energy, dari energi
listrik ke energi mekanik atau energi yang terlihat. Bentuk konkrit aktuator ini
misalnya: motor listrik, solenoid, relay, display, dll.
2.5.1. Motor DC
Motor DC merupakan peralatan elektromekanik dasar yang berfungsi untuk
mengubah tenaga listrik menjadi tenaga mekanik. Secara umum, kecepatan
putaran poros motor DC akan meningkat seiring dengan meningkatnya tegangan
yang diberikan. Dengan demikian, putaran motor DC akan berbalik arah jika
polaritas tegangan yang diberikan juga dirubah.
Gambar 2. 5Motor DC
Motor gear DC tidak dapat dikendalikan langsung oleh mikrokontroler,
karena kebutuhan arus yang besar sedangkan keluaran arus dari mikrokontroler
sangat kecil. Motor driver merupakan alternatif yang dapat digunakan untuk
2.5.2. IC Driver Motor
L298N adalah IC yang digunakan sebagai driver motor DC pada penelitian
ini. IC ini menggunakan prinsip kerja H-Bridge. Tiap H-Bridge dikontrol
menggunakan level tegangan TTL yang berasal dari output mikrokontroler.
Tegangan yang dapat digunakan untuk mengendalikan robot bisa mencapai
tegangan 46 VDC dan arus 2A untuk setiap kanalnya. L298 dapat mengontrol 2
buah motor DC, karena di dalam satu komponen L 298 N terdapat dua rangkaian
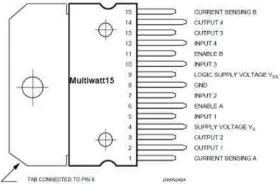
H-Bridge. Berikut ini bentuk IC L298 yang digunakan sebagai motor driver.
Gambar 2. 6Konfigurasi Pin IC L298N
Pengaturan kecepatan kedua motor dilakukan dengan cara pengontrolan
lama pulsa aktif (mode PWM – Pulse width Modulation) yang dikirimkan ke
rangkaian driver motor oleh pengendali (mikrokontroler). Duty cycle PWM yang
dikirimkan menentukan kecepatan putar motor DC.
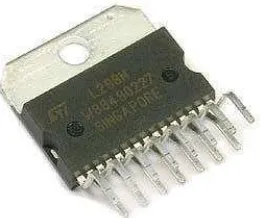
Driver motor L298N mempunyai karakteristik sebagai berikut:
1. tegangan operasional sampai 46 Volt,
2. total arus dc sampai 4 Ampere,
3. tegangan saturasinya rendah,
4. pengamanan terhadap suhu yang tinggi,
Gambar 2. 7 Bentuk Fisik IC Driver Motor L298N
2.5.3. Pulse Widht Modulation (PWM)
Pulse width Modulation (PWM), adalah sebuah metode untuk pengaturan
kecepatan perputaran, dalam hal ini adalah motor DC untuk gerak robot. PWM
dapat dihasilkan oleh empat metode, sebagai berikut.
1. Metode analog
2. Metode digital
3. IC diskrit
4. Mikrokontroler
Pada robot ini, metode PWM dikerjakan oleh mikrokontroler. Metode PWM
ini akan mengatur lebar atau sempitnya periode pulsa aktif yang dikirimkan oleh
mikrokontroler ke driver motor. Pada pengaturan kecepatan robot, nilai PWM
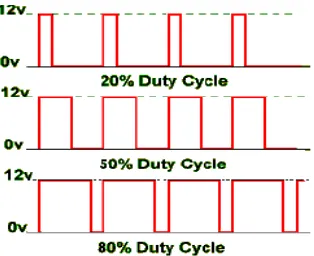
mulai dari 0-255. Secara analog besaran PWM dihitung dalam prosentase, nilai
ini didapat dari perbandingan: T high / (T high + T low ) * 100%. Dimana T
adalah periode atau waktu tempuh untuk sebuah pulsa, yang terbagi menjadi
Gambar 2. 8 Ilustrasi persentasi PWM
Semakin rapat periode antar pulsa, maka frekuensi yang dihasilkan akan
semakin tinggi, ini berarti kecepatan akan bertambah. Semakin lebar jarak antar
pulsa, maka frekuensi semakin rendah ini berarti kecepatan berkurang atau
menurun. Kondisi pemberian kecepatan harus disesuaikan dengan kondisi track
yang akan dilewati oleh robot, misal pada saat jalan lurus, naik atau turun harus
mendapatkan nilai PWM yang tepat.
Regulator 2.6
Catu daya adalah faktor pendukung yang sangat penting, karena
mikrokontroler, sensor-sensor dan aktuator dapat bekerja karena adanya tegangan.
Power supply yang dibutuhkan sebanyak 3 buah, pertama untuk mencatu
mikrokontroler yang membutuhkan level tegangan 5V. Kedua, mencatu modul
Wifly RN-171-XV dengan tegangan 3.3Vdc. Ketiga, tegangan kerja aktuator
berupa motor DC. Pemisahan tegangan ini dimaksudkan agar tegangan yang
masuk ke mikrokontroler tidak terganggu oleh tegangan dari motor. Tegangan
yang digunakan berasal dari baterai rechargeable Li-Po 7,4V 1000mAH, karena
mikrokontroler dan modul Bluetooth JY-MCU BT board v1.3 slave hanya mampu
mendapatkan tegangan 5V, dengan demikian digunakan IC regulator LD1117-3.3,
LM2940 dan atau LM7805CT.
Karakteristik IC regulator :
1. Ada tipe positif untuk meregulasi tegangan positif.
2. Ada tipe negatif untuk meregulasi tegangan negatif.
3. Penerapan IC mengharuskan tegangan input lebih besar dari tegangan
output (Vin > Vout).
4. Transistor dalam konfigurasi tunggal-emiter, dimana tegangan input Vin
> tegangan output Vout hanya kalau transistornya jenuh.
Gambar 2. 9 Regulator LM2940CT dan LM7805CT
Sensor 2.7
Sensor adalah sesuatu yang digunakan untuk mendeteksi adanya perubahan
lingkungan fisik atau kimia. Variabel keluaran dari sensor yang diubah menjadi
besaran listrik disebut Transduser. Pada saat ini, sensor tersebut telah dibuat
dengan ukuran sangat kecil dengan orde nanometer. Ukuran yang sangat kecil ini
2.7.1 Sensor Ultrasonik
Sensor ultrasonik bekerja berdasarkan prinsip pantulan gelombang suara,
dimana sensor ini menghasilkan gelombang suara yang kemudian menangkapnya
kembali dengan perbedaan waktu sebagai dasar penginderaannya. Perbedaan
waktu antara gelombang suara dipancarkan dengan ditangkapnya kembali
gelombang suara tersebut adalah berbanding lurus dengan jarak atau tinggi objek
yang memantulkannya. Jenis objek yang dapat diindera diantaranya adalah: objek
padat, cair, butiran maupun tekstil.
HC-SR04 memiliki 4 pin, VCC, TRIG, ECHO dan GND. VCC
dihubungkan dengan 5V dari Arduino dan GND dengan GND pada Arduino.
TRIG dan ECHO dihubungkan dengan pin mikrokontroler. Untuk lebih jelasnya
dapat dilihat pada gambar berikut ini.
Gambar 2. 10 HC-SR04
2.7.2 Sensor HMC5883L
Sensor HMC5883L ini adalah sensor yang sangat sensitif sekali terhadap
rotasi dan arah hadap sensor, dikarenakan sensor ini menggunakan medan magnet
sebagai acuan dari pendeteksiannya. Sensor ini memiliki port koneksi ke
mikrokontroller yaitu SDA, SCL, VCC dan GND, sehingga port I2C ini adalah
Tabel 2. 1Data arah mata angin pada HMC5883L
Sistem Kontrol Proportional–Integral–Derivative controller (PID)
merupakan pengendalian error dengan cara memasukkan error tersebut ke dalam
input yang akan dibandingkan dengan sistem pengendalian. Tujuan dari PID
untuk menghasilkan output atau keluaran yang sesuai dengan set point yang
diberikan dengan cara mengurangi error tersebut. Pengontrolan PID
menggunakan closed loop atau umpan balik, yaitu program diolah pada
mikrokontroler, lalu menjalankan actuator setelah itu mengeluarkan output.
Keluaran akan dibandingkan dengan sensor agar dapat mencapai setpoint yang
diinginkan.
Dibawah ini diperlihatkan gambar blok diagram pengontrol PID dengan
Gambar 2. 12 Pengontrolan PID dengan Closed loop
PID dapat juga digambarkan dengan persamaan :
= ��. + �� ∫ + � �� ……….. (1)
dengan,
�� = �� ∗�� �� � = �� ∗ � ……….. (2)
Keterangan :
u(t) : Output dari pengontrol PID Kp : Gain proporsional
Ti : Time integral Td : Time derivative Ki : Gain integral Kd : Gain derivative
Pengontrol PID merupakan paduan dari Pengontrol Proporsional,
Integral, Derivative. Cara kerja dari masing-masing pengontrol adalah sebagai
berikut.
1. Pengontrol proporsional memiliki keluaran yang sebanding/proporsional
dengan besarnya sinyal kesalahan. Ciri-ciri pengontrol proporsional :
- jika nilai Kp kecil, pengontrol proporsional hanya mampu koreksi
- jika nilai Kp dinaikkan, respon system akan semakin cepat,
- jika nilai Kp diperbesar sehingga mencapai harga yang berlebihan,
akan mengakibatkan system bekerja tidak stabil atau respon system
akan berosilasi,
- nilai Kp dapat diatur sehingga mengurangi steady state error tetapi
tidak menghilangkannya
2. Pengontrol Integral berfungsi untuk menghilangkan steady state error.
Ciri-ciri dari pengontrol integral adalah sebagai berikut :
- keluaran pengontrol integral membutuhkan selang waktu tertentu,
sehingga pengontrol integral cenderung memperlambat respon,
- Keluaran pengontrol bertahan pada nilai sebelumnya, ketika sinyal
kesalahan berharga nol,
- keluaran menunjukkan kenaikan atau penurunan yang dipengaruhi oleh
besarnyasinyal kesalahan dan nilai Ki, jika sinyal kesalahan tidak
berharga nol,
- Ki yang berharga besar mempercepat hilangnya nilai offset. Tetapi
semakin besar nilai Ki mengakibatkan peningkatan osilasi dari sinyal
keluaran pengontrol.
3. Pengontrol Derivative berfungsi untuk memperbaiki sekaligus
mempercepat respon transient. Ciri-ciri pengontrol derivative adalah
sebagai berikut:
- pengontrol tidak dapat menghasilkan keluaran jika tidak ada perubahan
- jika sinyal kesalahan berubah terhadap waktu, maka keluaran yang
dihasilkan pengontrol tergantung pada nilai Kd dan laju perubahan
sinyal kesalahan,
- pengontrol differensial mempunyai suatu karakter untuk mendahului,
sehingga pembangkit kesalahan menjadi sangat besar. Jadi pengontrol
differensial dapat mengantisipasi pembangkit kesalahan, memberikan
aksi yang sangat bersifat korektif dan cenderung meningkatkan
stabilitas sistem,
- dengan meningkatkan nilai Kd, dapat meningkatkan stabilitas sistem
dan mengurangi overshoot.
IDE Arduino 2.9
Software arduino yang akan digunakan adalah driver dan IDE. IDE
diciptakan untuk para pemula bahkan yang tidak memiliki basic bahasa
pemrograman sama sekali karena menggunakan bahasa C++ yang telah
dipermudah melalui library. IDE Arduino adalah software canggih yang ditulis
dengan menggunakan bahasa Java.
Software IDE arduino terdiri dari 3 bagian :
1. Editor program, untuk menulis dan mengedit program dalam bahasa
processing. Listing program pada arduino disebut sketch.
2. Compiler, sebuah modul yang berfungsi mengubah bahasa processing
(kode program) menjadi kode biner karena kode biner merupakan bahasa
program yang dipahami oleh mikrokontroler.
3. Uploder, sebuah modul yang berfungsi memasukkan kode biner ke dalam
Struktur perintah pada arduino secara garis besar terdiri dari dua bagian
yaitu void setup dan void loop. Void setup berisi perintah yang akan dieksukusi
hanya satu kali sejak arduino dihidupkan sedangkan void loop berisi perintah yang
akan dieksekusikan berulang-ulang selama arduino dinyalakan.
Gambar 2. 13 Tampilan Jendela Program CodeWizard AVR
Eagle 2.10
Software eagle merupakan software yang dapat membantu untuk mendisain
suatu printed circuit board (PCB). Selain mudah digunakan, di dalam software
Eagle juga terdapat berbagai macam jenis atau merek komponen elektronika yang
mendukung dalam pembuatan PCB. Salah satu fasilitas penting yang dimiliki oleh
Eagle adalah “print” yang memungkinkan kita untuk mencetak hasil PCB yang
24
DESAIN DAN PERANCANGAN ROBOT
3.1Perancangan Sistem
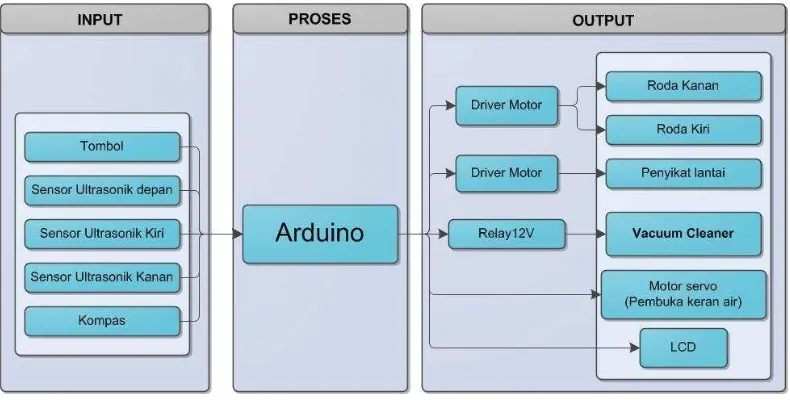
Perancangan dan pembuatan sistem robot vacuum cleaner dilakukan berdasarkan tiga
bagian utama yaitu bagian masukan (input), proses (process), dan keluaran (output). Tiga bagian
ini sangat berperan penting dalam pengontrolan kerja robot sehingga dapat diprogram dan
dikontrol dengan baik, bermanuver serta membersihkan ruangan. Berikut blok diagram sistem
robot vacuum cleaner :
Gambar 3. 1 Blok Diagram Sistem Robot
Dari blok diagram diatas dapat diuraikan sebagai berikut :
- Sensor ultrasonik ping depan berfungsi sebagai sensor jarak yang bekerja dengan cara
memancarkan suatu gelombang ke arah depan robot dan kemudian menghitung waktu
pantulan gelombang tersebut. Sensor ini berfungsi sebagai penjejak dinding bagi robot saat
berjalan pada arena sehingga saat robot berjalan dan bermanuver untuk mengitari ruangan,
- Sensor ultrasonik ping samping kiri berfungsi sebagai sensor jarak yang bekerja dengan
cara memancarkan suatu gelombang ke arah samping kiri robot dan kemudian menghitung
waktu pantulan gelombang tersebut. Sensor ini berfungsi sebagai penjejak dinding bagi
robot saat berjalan pada arena sehingga saat robot berjalan dan bermanuver untuk
menjelajahi ruangan, tidak terjadi tabrakan/benturan terhadap dinding/objek lainnya.
- Sensor ultrasonik ping samping kanan berfungsi sebagai sensor jarak yang bekerja dengan
cara memancarkan suatu gelombang ke arah samping kanan robot dan kemudian
menghitung waktu pantulan gelombang tersebut. Sensor ini berfungsi sebagai penjejak
dinding bagi robot saat berjalan pada arena sehingga saat robot berjalan dan bermanuver
untuk mengitari ruangan, tidak terjadi tabrakan/benturan terhadap dinding/objek lainnya.
- Kompas yang digunakan pada robot vacuum cleaner ini adalah Dt-Sense 3 axis-compas.
Digunakan untuk pembacaan orientasi robot sebagai referensi kendali PID agar robot dapat
bergerak lurus pada sudut tertentu dan kembali ke tempat semula robot mulai bergerak.
- Pengontrol yang digunakan adalah Arduino Mega yang berfungsi sebagai pusat kendali
dari robot vacuum cleaner. Bertindak untuk menerima masukan dari setiap sensor
(perangkat input) dan memberi eksekusi pada perangkat output.
- Motor DC bertindak sebagai penggerak bagi robot. Motor DC dikontrol arah dan
kecepatannya melalui IC L298N yang berguna sebagai driver motor . Pengaturannya
dilakukan melalui eksekusi program pada mikrokontroler arduino.
- Motor DC juga bertindak sebagai penggerak sapu dari robot. Motor DC dikontrol arah dan
kecepatannya melalui IC L298N yang berguna sebagai driver motor dan pengaturannya
- Vacuum cleaner bertindak sebagai penyedot debu. Vacuum cleaner yang dipakai
menggunakan penyedot debu mobil bertegangan 12V dan dihubungkan ke mikrokontroler
menggunakan relay.
- Motor servo bertindak sebagai penggerak keran air yang akan digunakan sebagai
pengharum lantai. Dan dikontrol langsung dari mikrokontroler Arduino mega
- Liquid Crystal Display (LCD) digunakan untuk menampilkan informasi-informasi robot
yang dibutuhkan seperti settingan pergerakan robot.
3.2Perancangan Mekanik Robot
Bahan mekanik robot vacuum cleaner yang dirancang terbuat dari bahan papan yang
dipotong dan dibentuk sebagai bodi robot. Memiliki tiga roda dengan posisi dua roda di belakang
sebagai penggerak dan satu roda di posisi depan sebagai penunjang. Bodi robot memiliki satu
lapisan, dimana pada bagian tengah digunakan untuk penempatan penampung sampah dan
penampung air. Bagian pinggir depan samping belakang penempatan sensor ultrasonic. Dan
Gambar 3. 2Robot Pembersih Lantai (tampak atas dan bawah)
Gambar 3. 3 Robot Pembersih Lantai (tampak depan)
Dalam perancangan perangkat keras ini akan dirancang beberapa rangkaian elektronik
yang antara lain adalah rangkaian catu daya, rangkaian pengendali motor arus searah, dan
rangkaian pengendali mikro.
Di bagian bawah depan robot terdapat sapu yang dapat berputar untuk menyapu kotoran
dikontrol menggunakan sebuah motor DC. Sampah yang disapu akan disedot oleh vacuum
dan akan ditempatkan pada suatu wadah yaitu penampung debu/sampah.
Pada bagian tengah atas robot terdapat penampung air yang berfungsi untuk menampung
air yang telah dicampur dengan cairan pengharum lantai. Dan juga terdapat vacuum dan
rangkaian elektronik robot.
Supaya robot tidak menabrak dinding atau penghalang yang berada di sekitarnya,
digunakan sensor ultrasonik yang diletakkan pada bagian depan, kanan dan kiri robot.
3.3Perancangan Sistem Elektronik Dan Pemilihan Komponen
Perancangan dan pembuatan sistem kontrol elektronika pada robot vacuum cleaner sangat
diperlukan. Agar robot dapat berjalan dan bekerja dengan baik, diperlukan sistem kontrol
elektronika yang memberikan catu daya secara elektris pada komponen-komponen elektronika
pada robot sehingga robot bisa diaktifkan dan dijalankan sesuai keinginan programmer.
3.3.1 Voltage Regulator (Catu Daya)
Catu daya pada robot vacuum cleaner ini menggunakan suplai tegangan dari sebuah baterai
isi ulang jenis Lithium Pollimer (Lipo) dengan spesifikasi tegangan 11.1 V dan arus sebesar 1550
mAh /1.5 Ampere. Tegangan suplai yang dibutuhkan pada robot vacuum cleaner adalah 11VDC
dan 5VDC, sehingga dibutuhkan regulator tegangan untuk meregulasi tegangan baterai menjadi
5VDC sesuai kebutuhan suplai daya pada rangkaian mikrokontroler arduino, dan sensor yang
Gambar 3. 4 Skematik Regulator Tegangan
3.3.2 Mikrokontroler
Mikrokontroler yang digunakan adalah mikrokontroler jenis Arduino Mega 2560.
Mikrokontroler ini dapat bekerja dengan baik pada kondisi adanya goncangan. Skema
penggunaan pin-pin input output pada mikrokontroler ditunjukkan pada Tabel 3.1.
Tabel 3. 1Konfigurasi penggunaan pin pada mikrokontroler Arduino Mega 2560
PIN Keterangan PIN Keterangan
53 Sensor PING 1 (Echo) 43 Enable 1 Motor (Roda) 51 Sensor PING 1 (Trigger) 41 Enable 2 Motor (Roda)
49 Sensor PING 2 (Echo) 6 PWM Pin Motor1 (Roda)
47 Sensor PING 2 (Trigger) 7 Polarity Pin Motor 1 (Roda) 45 Sensor PING 3 (Echo) 8 PWM Pin Motor 2 (Roda) 43 Sensor PING 3 (Trigger) 9 Polarity Pin Motor 2 (Roda)
2 PWM Pin Motor1a (Sapu) 5 Polarity Pin Motor 2a (Sapu) 3 Polarity Pin Motor 1a (Sapu) 31 Enable 3 Motor (Sapu) 4 PWM Pin Motor2a (Sapu) 10 Motor Servo (Keran air)
Gambar 3. 6Arduino Mega 2560
3.3.3 Compass Dt-Sense 3 Axis HMC5883L
Pada implementasi system PID dari robot vacuum cleaner ini menggunakan modul
Dt-Sense 3 axis compass sebagai referensi sudut acuan. Dt-Dt-Sense 3 menggunakan IC HMC5883L
produksi Honeywell. IC HMC5883L merupakan chip yang didesain untuk membaca medan
magnet yang cocok untuk aplikasi penunjuk arah dan magnetometry.
Tabel 3. 2Konfigurasi PIN DT-Sense 3Axis compass
PIN DT-SENSE PIN ARDUINO
Spesifikasi dari sensor kompas Dt-Sense 3 axis adalah sebagai berikut:
1. Tegangan kerja 3,3V dan konsumsi arus rendah (hingga 100µA) ,
2. Memiliki sensor magnetoresistive 3 sumbu,
3. Memiliki jangkauan pembacaan medan magnet sampai dengan ±8 Gauss dengan resolusi
5miligauss,
4. Output rate maksimum sampai dengan 160Hz (Single Measurement Mode),
5. Output rate 0,75 Hz sampai dengan 75Hz (Continous Measurement Mode),
Gambar 3. 7 Rangkaian compass dt-sense 3 Axis
3.3.4 Driver Motor (L298N)
Rangkaian driver motor menggunakan IC L298N bekerja dengan sistem dasar H-Bridge.
IC L298N memiliki spesifikasi untuk mengatur dua motor sekaligus. Pin 5,7,10,12 adalah pin
input yang berfungsi mengatur arah putaran motor, pin 2,3,13,14 berfungsi sebagai pin output
yang tehubung ke motor DC. Dioda berguna sebagai pengaman.
Gambar 3. 8 Rangkaian driver motor penggerak roda
3.3.5 Wall Sensing (Sensor Jarak)
Sensor jarak menggunakan jenis sensor ultrasonik ping. Sensor ultrasonik adalah alat
elektronika yang kemampuannya bisa mengubah dari energi listrik menjadi energi mekanik
dalam bentuk gelombang suara ultrasonik. Sensor ini terdiri dari rangkaian pemancar ultrasonik
Alat ini digunakan untuk mengukur gelombang ultrasonik. Gelombang ultrasonik adalah
gelombang mekanik yang memiliki ciri-ciri longitudinal dan biasanya memiliki frekuensi 20
KHz - 20 MHz.
Gambar 3. 9 Rangkaian sensor jarak
Modul sensor Ultrasonik ini dapat mengukur jarak antara 3 cm sampai 300 cm. Keluaran
dari modul sensor ultrasonik Ping ini berupa pulsa yang lebarnya merepresentasikan jarak.
Secara prinsip modul sensor ultrasonik ini terdiri dari sebuah chip pembangkit sinyal 40KHz,
sebuah speaker ultrasonik dan sebuah mikropon ultrasonik. Speaker ultrasonik mengubah sinyal
40 KHz menjadi suara sementara mikropon ultrasonik berfungsi untuk mendeteksi pantulan
suaranya.
3.3.6 Liquid Crystal Display (LCD)
Display elektronik adalah salah satu komponen elektronika yang berfungsi sebagai
tampilan suatu data, baik karakter, huruf ataupun grafik. LCD (Liquid Cristal Display) adalah
salah satu jenis display elektronik yang dibuat dengan teknologi CMOS logic yang bekerja
dengan tidak menghasilkan cahaya tetapi memantulkan cahaya yang ada di sekelilingnya
terhadap front-lit atau mentransmisikan cahaya dari back-lit. LCD (Liquid Cristal Display)
Gambar 3. 10 Rangkaian LCD
Dalam modul LCD (Liquid Cristal Display) terdapat microcontroller yang berfungsi
sebagai pengendali tampilan karakter LCD (Liquid Cristal Display). Mikrontroller pada suatu
LCD (Liquid Cristal Display) dilengkapi dengan memori dan register. Keterangan pin dari LCD:
1. VSS : digunakan untuk menyalakan LCD (ground)
2. VDD : digunakan untuk menyalakan LCD ( +5 V )
3. VEE : digunakan untuk mengatur tingkat contrast pada LCD
4. RS : menentukan mode yang akan digunakan (0 = instruction input , 1 = data input)
5. R/W : menentukan mode yang akan digunakan (0 = write , 1 = read)
6. EN : enable ( untuk clock )
7. D0 : data 0
8. D1 : data 1
9. D2 : data 2
10. D3 : data 3
12. D5 : data 5
13. D6 : data 6
14. D7 : data 7 ( MSB )
3.3.7 Vacuum Cleaner
Rangkaian dari vacuum cleaner menggunakan relay sebagai saklar untuk menyalakan
vacuum tersebut. Dan transistor 2n222 berfungsi sebagai driver relay yang akan mengaktifkan
relay. Dan relay akan dihubungkan langsung tegangan 12V dan mikrokontroler.
Gambar 3. 11 Rangkaian Vacuum Cleaner
3.3.8 Motor Penyapu
Rangkaian dari motor penyapu dan penyikat menggunakan IC L298N bekerja dengan
sistem dasar H-Bridge.
IC L298N memiliki spesifikasi untuk mengatur dua motor sekaligus. Pin 5,7,10,12 adalah
pin input yang berfungsi mengatur arah putaran motor, pin 2,3,13,14 berfungsi sebagai pin
output yang tehubung ke motor DC. Dioda berguna sebagai pengaman.
3.3.9 Tombol/Keypad
Tombol /keypad hanya terhubung ke mikro. Tombol berfungsi sebagai pengaktif semua
rangkaian yang berpusat pada mikro. Jika tombol tidak ditekan, maka data akan terbaca sebagai
Low (0), Jika tombol ditekan maka data akan terbaca High (1).
Gambar 3. 13 Rangkaian Tombol
3.4 Perancangan Perangkat Lunak
4.1Algoritma Pemrograman
Dalam pembuatan program/perangkat lunak untuk menjalankan robot vacuum cleaner yang
dirancang, dibutuhkan alur penyelesaian masalah melalui pembuatan algoritma/alur perintah
dalam bentuk diagram alir (flowchart) yang berguna untuk menganalisis dan mengatur eksekusi
serta respons robot terhadap masukan dari luar seperti penghalang, yang akan dideteksi robot
pada arena. Berikut adalah susunan diagram alir (flowchart) robot vacuum cleaner berbasis
Gambar 3. 17 Flowchart prosedur set point dan finish
4.2Konfigurasi Prosedur Program Menjalankan Robot
Agar robot dapat berjalan dan bermanuver sesuai keinginan, maka perlu dibuat
perancangan prosedur eksekusi pada aktuator, baik arah maupun kecepatannya.
Tabel 3. 3Prosedur Eksekusi Aktuator
Arah A+ A- B+ B-
Maju 0 1 1 0
Mundur 1 0 0 1
Belok kanan 0 1 0 1
Belok kiri 1 0 1 0
Berhenti 0 0 0 0
Ket :
0 : Logika Low
1 : Logika High
A+ & A- : Terminal Motor DC Kiri
PENGUJIAN DAN ANALISA SISTEM
Untuk mengetahui kehandalan dan keberhasilan dari sistem yang dibuat, maka
dilakukan pengujian terhadap komponen-komponen pembangun sistem terutama
sensor-sensor.
4.1. PENGUJIAN SISTEM
4.1.1. Pengujian Sensor Ultrasonik
Sensor ultrasonik bekerja berdasarkan perbandingan dari berapa waktu yang
ditangkap setelah gelombang itu dipancarkan. Semakin jauh benda maka waktu
pantulan akan semakin lama sedangkan jika semakin dekat benda maka pantulan
akan semakin cepat.
Tabel 4. 1. Hasil Pengukuran Jarak Menggunakan Sensor Ultrasonik
HC SR-04 1 HC SR-04 2 HC SR-04 3
Pengujian motor driver dilakukan untuk mengetahui tingkat keberhasilan dalam
menggerakan dan mengatur putaran motor. Hasil pengujian dapat dilihat pada
tabel 4.2.
Tabel 4. 2. Hasil pengujian driver motor
Enable IN+ IN_ Kondisi Motor Keterangan
LOW X X Tidak berputar Berhasil
LOW LOW Tidak berputar Berhasil
HIGH
LOW HIGH Berputar Berhasil
HIGH LOW Berputar Lawan arah Berhasil HIGH HIGH Tidak berputar Berhasil
Keterangan:
a. Jika enable bernilai nol (Low), maka berapapun inputnya, motor tidak akan
berputar.
b. Jika enable bernilai satu, maka kondisi motor sesuai dengan inputan. Kondisi
motor dapat terlihat pada table 4.2.
Pengujian driver motor ini dilakukan dengan cara memberikan inputan
dari mikrokontroler ke driver motor. Untuk menggerakkan satu motor dc
dibutuhkan tiga inputan yaitu input enable, input positif dan input negatif.
4.1.3. Pengujian Sistem Kendali Robot
Untuk mengetahui tingkat keberhasilan dan kehandalan sistem kendali
robot yang digunakan, maka dilakukan pengujian terhadap pergerakan robot.
Gerakan-gerakan yang sering dilakukan oleh robot seperti maju lurus, putar kanan
90°, putar kiri 90°, putar kiri 180°. Sama halnya ketika robot melakukan
Tabel 4. 3. Hasil Pengujian Pergerakan Robot.
Pergerakan Percobaan Keterangan %
Keberhasilan
4.1.1.1. Pengujian Vacuum Menyedot Kotoran
Pengujian ini dilakukan untuk mengetahui tingkat keberhasilan dalam
penyedotan kotoran dan mengetahui kotoran apa saja yang bisa disedot. Hasil
pengujian dapat dilihat pada tabel 4.4.
Tabel 4. 4. Hasil Pengujian Penyedotan Kotoran.
kotoran kecil seperti sobekan kertas, debu, pasir, rambut dan partikel kecil
lainnya.
4.1.1.2. Pengujian Robot Membersihkan Ruangan
Pengujian ini dilakukan untuk mengetahui persentase sampah yang
dibersihkan dalam ruangan tersebut Hasil pengujian dapat dilihat pada tabel 4.5.
Tabel 4. 5. Hasil Pengujian Persentase Kotoran yang Dibersihkan
No Berat awal
Dari hasil pengujian menggunakan sensor ultrasonik, dapat diketahui
bahwa pengukuran yang dilakukan sensor hampir mendekati jarak sesungguhnya.
Namun hasil jarak yang terdeteksi oleh ultrasonik dapat berbeda-beda karena
baik karena dapat menggerakan dan mengatur arah putaran motor sesuai instruksi
yang diberikan. Hanya saja motor dc akan panas dan cepat rusak karena IC ini
dapat menghasilkan arus lebih besar 2A, sedangkan motor dc hanya dapat
menampung arus maksimal 1A dan perubahan catu daya akan sangat
mempengaruhi kinerja IC.
4.2.3. Analisa Sistem Kendali Robot.
Saat pengujian kendali robot sangat terpengaruh oleh perubahan catu daya
karena penurunan catudaya akan menurunkan nilai kecepatan atau PWM (Pulse
Width Modulation). Penentuan kompas yang menjadi arah putaran pun sangat
berpengaruh pada ketepatan putaran, karena dalam algoritmanya robot akan
bergerak ke kanan atau ke kiri berdasarkan kompas. Selain itu, gaya gesek roda
terhadap lantai pun akan mempengaruhi ketepatan putaran.
4.2.4. Analisa Proses Pembersihan Ruangan
Dari data pengujian dapat diambil jumlah keberhasilan dari tiap titik pengujian
dan dari data tersebut dapat diambil rata-rata keberhasilan secara keseluruhan. Setelah
mendapatkan nilai rata-rata tingkat keberhasilan sistem secara keseluruhan maka
dapat diketahui presentase keberhasilan sistem secara keseluruhan. tingkat
keberhasilan perancangan secara keseluruhan adalah 86,4%. Kegagalan yang ditemui
47
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Dari pembahasan pada bab-bab sebelumnya, maka akhirnya penelitian pada tugas akhir ini
dapat diambil beberapa simpulan antara lain:
1. Berdasarkan hasil percobaan sistem robot vacuum cleaner sudah berjalan dengan baik
hingga mencapai 86,4% dari hasil yang diinginkan. Pada pembuatan robot vacuum
cleaner ini algoritma yang peneliti gunakan adalah algoritma dead reckoning.
2. Robot dapat bergerak dan mendeteksi objek-objek halangan disekitarnya sehingga dapat
menghindari sekaligus melakukan penyedotan kotoran kecil seperti, debu, pasir, rambut,
dan sobekan kecil kertas yang ada di lantai. Tetapi tidak dapat menyedot kotoran besar
seperti kertas, dan plastik.
5.2. Saran
Penulis memberikan saran bagi yang akan mengembangkan tugas akhir ini. Adapun saran
dari penulis adalah sebagai berikut:
1. Merancang sistem kendali robot yang lebih cepat dan handal, baik di bagian hardware atau
software agar tidak terlalu terpengaruh oleh catudaya.
2. Merancang program robot yang lebih baik agar dapat menyelesaikan bentuk semua bentuk
Nama Lengkap : Jack Cennon Burju Nainggolan Tempat/Tanggal Lahir : Sidikalang, 26 Juni 1991
Jenis Kelamin : Pria
Kewarganegaraan : Indonesia
Alamat : Jln. Sekeloa Selatan No.29, Bandung Nomor Handphone : 081285150011
2009 – 2015 : Anggota Persekutuan Mahasiswa Kristen (PMK) UNIKOM 2009 – 2015 : Anggota HIMA Elektro UNIKOM
Bandung, Agustus 2015 Hormat Penulis,
Diajukan sebagai salah satu syarat menempuh ujian Sarjana Strata 1 (S1)
pada program studi Teknik Elektro
Disusun Oleh:
JACK NAINGGOLAN
1.31.09.021
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
v
1.6 Sistematika Penulisan Laporan 5
BAB II DASAR TEORI 6
2.1 Sejarah Robot 6
2.2 Robot Mobile 7
2.2.1 Manual jauh atau tele-op 7
2.2.2 Guarded tele-op 7
2.2.3 Next-line 8
2.2.4 Robot Otonom acak 8
2.3 Sejarah Robot Vacuum Cleaner 9
2.4 Mikrokontroler 11
2.5 Aktuator 12
vi
2.6 Regulator 15
2.7 Sensor 16
2.7.1 Sensor Ultrasonik 17
2.7.2 Sensor HMC5883L 17
2.8 Pengontrolan Proporsional Integral Derivative (PID) 18
2.9 IDE Arduino 21
2.10 Eagle 22
BAB III DESAIN DAN PERANCANGAN ROBOT 24
3.1 Perancangan Sistem 24
3.2 Perancangan Mekanik Robot 26
3.3 Perancangan Sistem Elektronik Dan Pemilihan Komponen 28
3.3.1 Voltage Regulator (Catu Daya) 28
3.3.2 Mikrokontroler 29
3.3.3 Compass Dt-Sense 3 Axis HMC5883L 30
3.3.4 Driver Motor (L298N) 31
3.3.5 Wall Sensing (Sensor Jarak) 31
3.3.6 Liquid Crystal Display (LCD) 32
3.3.7 Vacuum Cleaner 34
3.3.8 Motor Penyapu 34
3.3.9 Tombol/Keypad 35
3.4 Perancangan Perangkat Lunak 35
3.4.1 Algoritma Pemrograman 35
vii
4.1.1. Pengujian Sensor Ultrasonik 42
4.1.2. Pengujian Motor Driver L298N 43
4.1.3. Pengujian Sistem Kendali Robot 43
4.1.4. Pengujian Membersihkan ruangan 44
4.2. Analisa Sistem 45
4.2.1. Analisa sensor Ultrasonik. 45
4.2.2. Analisa Motor Driver L298N. 46
4.2.3. Analisa Sistem Kendali Robot. 46
4.2.4. Analisa Proses Pembersihan Ruangan 46
BAB V KESIMPULAN DAN SARAN 47
5.1. Kesimpulan 47
5.2. Saran 47
DAFTAR PUSTAKA 48
viii
Gambar 2. 1 Robot Mobile 9
Gambar 2. 2 Electrolux dari Trilobite vacuum 9
Gambar 2. 3 Robot Vacuum DC06 10
Gambar 2. 4 Dyson 360 Eye 10
Gambar 2. 5 Motor DC 12
Gambar 2. 6 Konfigurasi Pin IC L298N 13
Gambar 2. 7 Bentuk Fisik IC Driver Motor L298N 14
Gambar 2. 8 Ilustrasi persentasi PWM 15
Gambar 2. 9 Regulator LM2940CT dan LM7805CT 16
Gambar 2. 10 HC-SR04 17
Gambar 2. 11 Sensor HMC5883L 18
Gambar 2. 12 Pengontrolan PID dengan Closed loop 19
Gambar 2. 13 Tampilan Jendela Program CodeWizard AVR 22
Gambar 2. 14Software Eagle 23
Gambar 3. 1 Blok Diagram Sistem Robot 24
Gambar 3. 2Robot Pembersih Lantai (tampak atas dan bawah) 27
Gambar 3. 3 Robot Pembersih Lantai (tampak depan) 27
Gambar 3. 4 Skematik Regulator Tegangan 29
Gambar 3. 5 Konfigurasi PIN Arduino Mega 2560 29
Gambar 3. 6Arduino Mega 2560 30
Gambar 3. 7 Rangkaian compass dt-sense 3 Axis 31
Gambar 3. 8 Rangkaian driver motor penggerak roda 31
ix
Gambar 3. 12 Rangkaian driver motor penggerak penyapu 34
Gambar 3. 13 Rangkaian Tombol 35
Gambar 3. 14 Flowchart program utama 36
Gambar 3. 15 Program pergerakan robot 37
Gambar 3. 16 Flowchart prosedur PID 38
Gambar 3. 17 Flowchart prosedur set point dan finish 39
Gambar 3. 18 Flowchart prosedur inisialisasi motor 39
x
Tabel 2. 1Data arah mata angin pada HMC5883L 18
Tabel 3. 1Konfigurasi penggunaan pin pada mikrokontroler Arduino Mega 2560 29
Tabel 3. 2Konfigurasi PIN DT-Sense 3Axis compass 30
Tabel 3. 3Prosedur Eksekusi Aktuator 41
Tabel 4. 1. Hasil Pengukuran Jarak Menggunakan Sensor Ultrasonik 42
Tabel 4. 2. Hasil pengujian driver motor 43
Tabel 4. 3. Hasil Pengujian Pergerakan Robot. 44
Tabel 4. 4. Hasil Pengujian Penyedotan Kotoran. 44
[1] Maeda, Y. Kuswadi, Son. M, Nuh. Sulistyo MB. Kontrol Automatik. Politeknik Elektronika Surabaya;1993.
[2] Pitowarno, Endra. (2006). Robotika: Desain, Kontrol, Dan Kecerdasan Buatan. ANDI. Yogyakarta.
[3] http://diglib.petra.ac.id, accesed by Januari 2010. Pitowarno,Endra.2005. Mikroprosesor dan Interfacing. Yogyakarta: ANDI.
Puji dan syukur saya ucapkan kepada Tuhan Yesus Kristus atas segala kemurahan dan
pertolongan-Nya, sehingga saya dapat menyelesaikan laporan tugas akhir ini dengan judul
“Robot Vacuum Cleaner Otomatis Berbasis Arduino”. Laporan tugas akhir ini diajukan sebagai
persyaratan dalam menyelesaikan studi pada Program Studi Teknik Elektro, Fakultas Teknik dan
Ilmu Komputer Universitas Komputer Indonesia.
Dalam penulisan Laporan tugas akhir ini, tentunya banyak pihak yang telah memberikan
bantuan baik moril maupun materil. Oleh karena itu, dalam kesempatan ini saya ingin
menyampaikan ucapan terima kasih saya secara khusus kepada kedua Orangtua terhebat saya,
Bapak dan Mama tercinta atas kasih sayang, motivasi dan doa restu yang tiada putusnya dan
kepada keempat Saudara tersayang “bang Pahala, kak Eka, adek Putra, dan adek Sri” yang
banyak memotivasi saya. Saya juga ingin mengucapkan terimakasih kepada.
1. Bapak Dr. Ir. Eddy Suryanto Soegoto, M.Sc selaku Rektor UNIKOM..
2. Bapak Prof. Dr. H. Denny Kurniadie, Ir., M.Sc selaku Dekan Fakultas Teknik dan Ilmu
Komputer UNIKOM
3. Bapak Muhammad Aria, M.T. sebagai Ketua Program Studi Teknik Elektro UNIKOM dan
selaku dosen pembimbing yang telah membantu mulai dari awal sampai penyelesaian
tugas akhir ini.
4. Bapak Bobi Kurniawan, S.T., M.Kom. selaku Dosen Wali.
5. Ibu Tri Rahajoeningroem, M.T, sebagai Koordinator Tugas Akhir Program Studi Teknik
Elektro UNIKOM.
satu, yang telah memberikan semangat dan ikut berperan dalam penyusunan laporan tugas
akhir ini.
8. Rekan-rekan seperjuangan mahasiswa Teknik Elektro 2009 UNIKOM atas semangat dan
motivasi selama penulisan laporan ini.
Semoga Laporan Tugas Akhir ini dapat memberikan manfaat yang optimal bagi saya
khususnya dan bagi para pembaca pada umumnya. Saya mengharapkan kritik dan saran dari para
pembaca demi kesempurnaan dan pengembangan laporan ini ke arah yang lebih baik.
Bandung, Agustus 2015