Rancang Bangun Robot
Vacuum Cleaner
Berbasis Mikrokontroler
Afwan Zikri*), Anton Hidayat**), Derisma***) *†***
Sistem Komputer, Universitas Andalas **
Teknik Elektro Politeknik Negeri Padang
E-Mail: *[email protected], **[email protected], ***[email protected]
Abstrak
Salah satu aplikasi robot dalam rumah tinggal adalah robot penghisap debu
(vacuum cleaner). Robot penghisap debu mampu bergerak membersihkan
ruangan secara mandiri dan cerdas, tanpa dikendalikan oleh manusia. T
ujuan penelitian ini adalah merancang dan membangun robot vacuum cleaner untuk dapat membersihkan lantai ruangan secara teratur berdasarkan set point yang telah diatur. Sistem yang dibuat terdiri dari motor DC, sensor ultrasonik, vacuum cleaner, mikrokontroler arduino uno, dan motor shield sebagai driver motor. Pengontrolan gerak robot menggunakan logika fuzzy dengan pengambilan keputusan menggunakan metode Sugeno. Input dari logika fuzzy terdiri atas 2 macam, yaitu „error‟ dan „delta_error‟. Output dari logika fuzzy berupa nilai PWM yang digunakan sebagai penggerak motor DC. Setelah dilakukan pengujian dan analisa, tingkat kebersihan yang dicapai oleh robot dalam selang waktu rata-rata 1 menit 11 detik adalah 77,4%. Kata Kunci: Robot vacuum cleaner, sensor ultrasonik, logika fuzzy, metode Sugeno, PWM1.
PENDAHULUAN
Pada zaman modern saat ini, sebagian orang umumnya sudah menggunakan vacuum cleaner sebagai alat bantu dalam membersihkan lantai suatu ruangan. Vacuum cleaner yang ada saat ini termasuk dalam jenis robot manual, yang mana vacuum cleaner yang digunakan saat ini masih membutuhkan tenaga manusia untuk mengarahkan vacuum cleaner ke lantai yang akan dibersihkan, penggunaan vacuum cleaner terlalu merepotkan dengan cara manual dikarenakan digerakkan dengan bantuan manusia. Ide untuk menciptakan sistem penyedot debu otomatis yang dapat bernavigasi sendiri telah ada sejak beberapa waktu. beberapa group yang berbeda telah mencoba membuat alat ini [7].
Untuk pembelajaran dan mengeksplorasi robot penghisap debu, dirancanglah sebuah robot vacuum cleaner yang bertugas untuk membersihkan debu atau sampah yang terdapat pada suatu lantai ruangan.
Untuk membangun sebuah robot penghisap debu, diperlukan enam buah subsistem yang saling terintegrasi untuk menghasilkan sebuah sistem yang optimal. Keenam subsistem tersebut adalah subsistem pendeteksi lingkungan, subsistem penyapu dan penghisap, subsistem pengendali, subsistem penggerak,
subsistem penghitung putaran, dan subsistem catu daya [3].
Pada vacuum cleaner yang biasa kekuatan hisapan dilakukan secara manual baik dari permukaan lantai apapun. Bahkan ada yang kekuatan hisapannya tidak bisa di kontrol, jadi untuk semua permukaan kekuatan sedotan akan sama. Hal ini tentu saja tidak hemat dan efisien jika dilakukan terus menerus. Otomatisasi pada kekuatan sedotan akan sangat berguna dan menghemat, jadi prinsipnya vacuum cleaner akan mendeteksi banyaknya debu dan permukaan pada lantai kemudian akan mengubah tekanan yang diperlukan pada penyedot debu tersebut [7].
Memanfaatkan fuzzy logic, proses otomatisasi pada vacuum cleaner maka bisa diwujudkan [8]. Pengontrolan gerak robot menggunakan logika fuzzy dengan pengambilan keputusan menggunakan metode Sugeno. Kontroler logika fuzzy dikategorikan dalam kontrol cerdas (intelligent control). Fuzzy
berarti kabur atau samar (kualitatif) dan Logika berarti “umumnya dilakukan orang yaitu berpikir secara logis”. Jadi, logika fuzzy berarti berpikir secara logika untuk parameter yang kualitatif (samar)[4]
Dalam pengaplikasian robot ini, dimanfaatkan dua buah motor DC sebagai
penggerak robot, motor shield sebagai driver motor, vacuum cleaner DC sebagai penyedot debu, sensor ultrasonik sebagai sensor jarak, mikrokontroler arduino sebagai controller
utama dalam sistem yang akan dibuat ini. Ultrasonik sering digunakan untuk keperluan mengukur jarak sebuah benda atau untuk mendeteksi rintangan. Teknik mengukur menggunakan ultrasonik ini meniru cara yang digunakan kelelawar atau lumba-lumba yang secara alami menggunakan sonar (sound navigation and ranging) untuk keperluan mengukur jarak dan navigasi.[5]
Mikrokontroler Arduino Uno memiliki semua yang diperlukan untuk mendukung mikrokontroler, secara sederhana mikrokontroler Arduino Uno dapat terhubung dengan komputer melalui sebuah kabel USB dengan adaptor AC-DC atau baterai untuk dapat mulai mengoperasikannya.[6]
2.
METODOLOGI
PENELITIAN
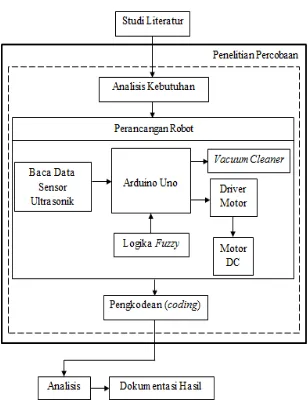
Rancangan penelitian dalam perancangan robot vacuum cleaner dapat dilihat pada Gambar 1 berikut
Gambar 1. Rancangan Penelitian 2.1. Studi Literatur
Studi literatur dilakukan dengan :
a. Mempelajari prinsip kerja sensor ultrasonik untuk membaca jarak
b. Mempelajari prinsip kerja motor shield sebagai pengendali motor DC
c. Mempelajari penerapan logika fuzzy dengan menggunakan metode Sugeno sebagai pengambil keputusan
d. Mempelajari penelitian-penelitian sebelumnya yang berkaitan dengan topik yang akan dibahas.
2.2. Penelitian Percobaan
A. Analisis kebutuhanKelancaran proses pembuatan hardware dan software secara keseluruhan dan kelengkapan fitur software yang dihasilkan sangat tergantung pada hasil analisis kebutuhan ini yang umumnya dilakukan diskusi dan survei. B. Perancangan Robot
Pada tahap perancangan ini akan dilakukan pengerjaan baik dari segi bentuk mekanik robot maupun dari segi hardware terhadap sistem yang akan dibangun.
C. Pengkodean (coding)
Untuk dapat dimengerti oleh mesin, dalam hal ini adalah robot vacuum cleaner, maka dibutuhkan perintah yang dapat dimengerti oleh robot untuk dapat bekerja sesuai instruksi yang diberikan. Instruksi tersebut ditulis ke dalam bahasa pemograman melalui proses pengkodean.
2.3. Analisis
Ketika robot vacuum cleaner telah selesai dibangun, maka robot dapat langsung di uji coba ke lapangan. Setelah itu dapat dilihat tujuan dan fungsi robot vacuum cleaner yang dirancang oleh penulis dapat berguna dan berfungsi normal sesuai dengan yang diharapkan.
2.4. Dokumentasi Hasil
Hal ini perlu dilakukan untuk dapat membuktikan bahwa robot vacuum cleaner yang telah dibangun dapat melakukan fungsinya dengan baik sesuai dengan apa yang telah dirancang pada pembuatan robot ini (Gambar 2).
Gambar 2. Blok Diagram Sistem Robot
Pada keadaan awal, sensor mendeteksi adanya halangan pada sisi kiri robot, jika tidak terpadat halangan pada sisi kiri robot maka robot akan berbelok ke arah kiri mencari halangan yang paling dekat dari sensor kiri. Jika halangan pada sisi kiri robot sudah terdeteksi maka robot akan mendekat ke halangan tersebut hingga robot dapat memposisikan diri dalam jarak yang sudah ditentukan berdasarkan set point sehingga robot mampu bergerak zigzag sesuai perintah yang ditulis dalam editor. Sedangkan vacuum cleaner akan bekerja secara terus menerus tanpa memperhatikan debu atau sampah yang akan disedotnya pada saat robot dihidupkan dan akan berhenti bekerja pada saat daya pada vacuum cleaner habis. Jadi, robot
vacuum cleaner akan bergerak secara zigzag berdasarkan set point yang telah ditentukan dan akan menyedot debu secara terus menerus berdasarkan arah pergerakan robot.
A.Flowchart Program
Flowchart program yang dibuat pada mikrokontroler dapat dilihat pada Gambar 3. Mikrokontroler yang terdapat pada robot
vacuum cleaner diprogram untuk dapat
membaca halangan melalui sensor ultrasonik. Data yang diterima oleh sensor ultrasonik akan diproses pada mikrokontroler dan dilanjutkan dengan tindakan menggerakkan robot berdasarkan set point ke arah yang sudah ditentukan.
Gambar 3. Flowchart Program Pada Mikrokontroler
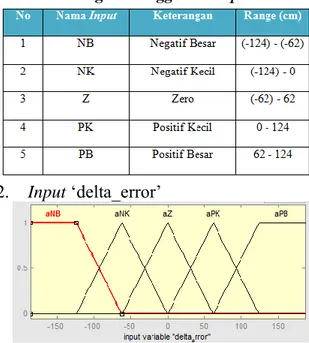
Untuk algoritma logika fuzzy, dilakukan perancangan fungsi keanggotaan dan perancangan rule atau aturan yang akan diimplementasikan pada sistem. Proses pembentukan rule dilakukan dengan penalaran manusia yang akan menyesuaikan dengan kondisi yang dihadapi oleh sistem, sehingga sistem dapat melakukan pengambilan keputusan sesuai dengan kondisi pada saat itu. Tahapan dalam pembentukan rule tersebut, yaitu : a. Fuzzifikasi
Pada tahap ini akan dilakukan pembentukan himpunan anggota fuzzy dan menentukan derajat keanggotaannya agar masukan-masukan yang nilainya bersifat pasti (crisp input) dapat diubah ke dalam bentuk
fuzzy input. Gambar 4 dan Gambar 5 berikut adalah fungsi keanggotaan input “error” dan
“delta error” yang digunakan pada sistem :
1.
Input “error”
Gambar 4. Fungsi Keanggotaan Input „error‟
Tabel 1. Fungsi Keanggotaan Input ‘error’
2.
Input „delta_error‟
Gambar 5. Fungsi Keanggotaan Input „delta
Tabel 2.Fungsi Keanggotaan Input
‘delta_error’
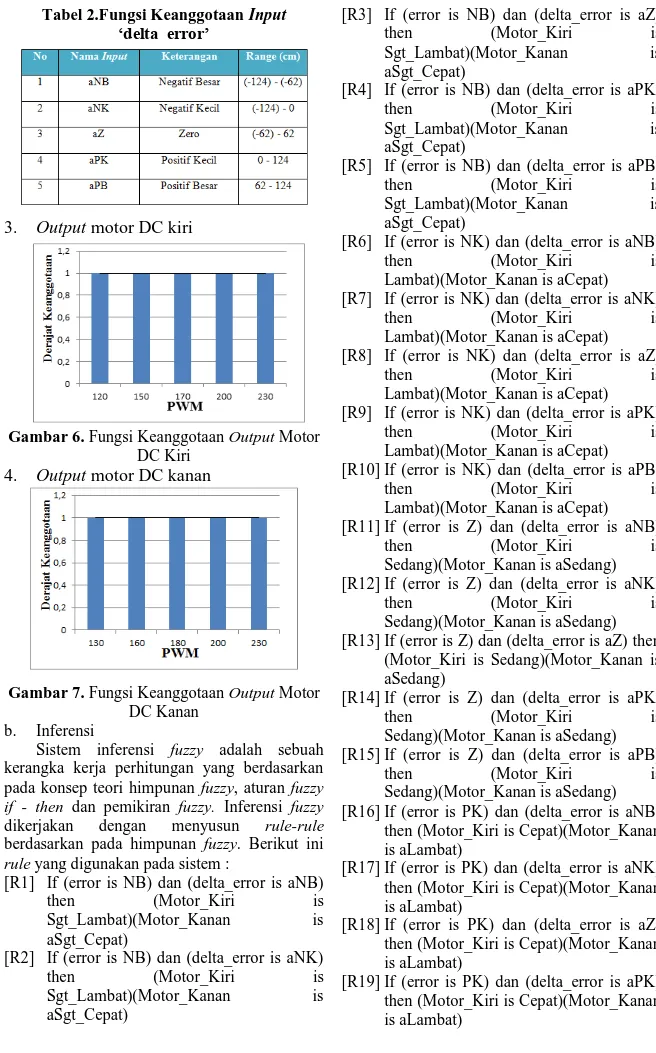
3.
Output motor DC kiri
Gambar 6. Fungsi Keanggotaan Output Motor DC Kiri
4.
Output motor DC kanan
Gambar 7. Fungsi Keanggotaan Output Motor DC Kanan
b. Inferensi
Sistem inferensi fuzzy adalah sebuah kerangka kerja perhitungan yang berdasarkan pada konsep teori himpunan fuzzy, aturan fuzzy if - then dan pemikiran fuzzy. Inferensi fuzzy
dikerjakan dengan menyusun rule-rule
berdasarkan pada himpunan fuzzy. Berikut ini
rule yang digunakan pada sistem :
[R1] If (error is NB) dan (delta_error is aNB) then (Motor_Kiri is Sgt_Lambat)(Motor_Kanan is aSgt_Cepat)
[R2] If (error is NB) dan (delta_error is aNK) then (Motor_Kiri is Sgt_Lambat)(Motor_Kanan is
[R3] If (error is NB) dan (delta_error is aZ) then (Motor_Kiri is Sgt_Lambat)(Motor_Kanan is aSgt_Cepat)
[R4] If (error is NB) dan (delta_error is aPK) then (Motor_Kiri is Sgt_Lambat)(Motor_Kanan is aSgt_Cepat)
[R5] If (error is NB) dan (delta_error is aPB) then (Motor_Kiri is Sgt_Lambat)(Motor_Kanan is aSgt_Cepat)
[R6] If (error is NK) dan (delta_error is aNB) then (Motor_Kiri is Lambat)(Motor_Kanan is aCepat)
[R7] If (error is NK) dan (delta_error is aNK) then (Motor_Kiri is Lambat)(Motor_Kanan is aCepat)
[R8] If (error is NK) dan (delta_error is aZ) then (Motor_Kiri is Lambat)(Motor_Kanan is aCepat)
[R9] If (error is NK) dan (delta_error is aPK) then (Motor_Kiri is Lambat)(Motor_Kanan is aCepat)
[R10] If (error is NK) dan (delta_error is aPB) then (Motor_Kiri is Lambat)(Motor_Kanan is aCepat)
[R11] If (error is Z) dan (delta_error is aNB) then (Motor_Kiri is Sedang)(Motor_Kanan is aSedang) [R12] If (error is Z) dan (delta_error is aNK)
then (Motor_Kiri is Sedang)(Motor_Kanan is aSedang) [R13] If (error is Z) dan (delta_error is aZ) then
(Motor_Kiri is Sedang)(Motor_Kanan is aSedang)
[R14] If (error is Z) dan (delta_error is aPK) then (Motor_Kiri is Sedang)(Motor_Kanan is aSedang) [R15] If (error is Z) dan (delta_error is aPB)
then (Motor_Kiri is Sedang)(Motor_Kanan is aSedang) [R16] If (error is PK) dan (delta_error is aNB)
then (Motor_Kiri is Cepat)(Motor_Kanan is aLambat)
[R17] If (error is PK) dan (delta_error is aNK) then (Motor_Kiri is Cepat)(Motor_Kanan is aLambat)
[R18] If (error is PK) dan (delta_error is aZ) then (Motor_Kiri is Cepat)(Motor_Kanan is aLambat)
[R19] If (error is PK) dan (delta_error is aPK) then (Motor_Kiri is Cepat)(Motor_Kanan
[R20] If (error is PK) dan (delta_error is aPB) then (Motor_Kiri is Cepat)(Motor_Kanan is aLambat)
[R21] If (error is PB) dan (delta_error is aNB) then (Motor_Kiri is Sgt_ Cepat)(Motor_Kanan is aSgt_Lambat) [R22] If (error is PB) dan (delta_error is aNK)
then (Motor_Kiri is Sgt_ Cepat)(Motor_Kanan is aSgt_Lambat) [R23] If (error is PB) dan (delta_error is aZ)
then (Motor_Kiri is Sgt_ Cepat)(Motor_Kanan is aSgt_Lambat) [R24] If (error is PB) dan (delta_error is aPK)
then (Motor_Kiri is Sgt_ Cepat)(Motor_Kanan is aSgt_Lambat) [R25] If (error is PB) dan (delta_error is aPB)
maka (Motor_Kiri is Sgt_Cepat)(Motor_Kanan is aSgt_Lambat)
c. Defuzifikasi
Pada proses defuzifikasi ini digunakan metode Centroid atau Center Of Gravity (COG) dari metode Sugeno, pada metode ini solusi
crisp diperoleh dengan cara mengambil nilai rata-rata domain yang memiliki nilai keanggotaan minimum. Hasil dari perhitungan menggunakan metode COG ini akan digunakan sebagai nilai PWM untuk dapat menggerakkan motor DC pada robot.
3.
HASIL
DAN
ANALISA
Pengujian dari robot vacuum cleaner
dilakukan dengan membutuhkan sebuah lapangan untuk pengujian dari robot agar diketahui hasil dari tingkat kebersihan yang dicapai oleh robot. Lapangan uji yang digunakan berukuran 1,5 x 1,5 meter. Pada pengujian yang dilakukan, bahan pengujian terdiri dari potongan gabus, kertas, tisu, dan plastik dimana jumlah keseluruhannya adalah 50 buah. Tingkat kebersihan dihitung berdasarkan banyaknya debu atau sampah yang berhasil disedot oleh robot.
Untuk mengetahui tingkat keberhasilan robot dalam membersihkan suatu ruangan, maka dibutuhkan beberapa kali percobaan.
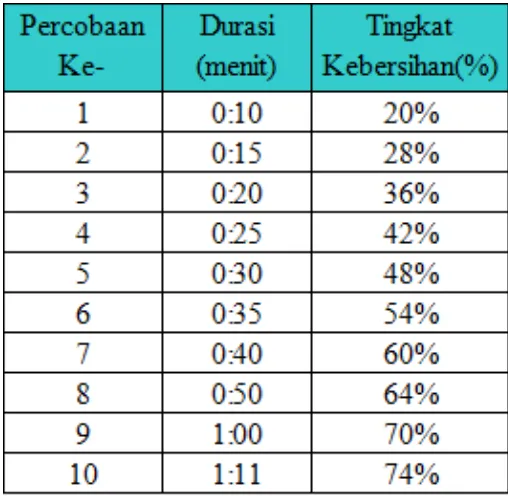
Gambar 8. Lapangan Uji Tanpa Halangan Tabel 3 merupakan hasil pengujian tingkat kebersihan yang dapat dilakukan oleh robot
vacuum cleaner.
Tabel 3. Tingkat Kebersihan Tanpa Halangan
Berdasarkan Tabel 3, dapat disimpulkan bahwa tingkat kebersihan maksimal yang dicapai oleh robot adalah 77,4%. Tidak tercapainya tingkat kebersihan sebanyak 100% oleh robot dikarenakan tidak terjangkaunya debu atau sampah yang berada di tepi dinding sedangkan robot vacuum cleaner hanya dapat menyedot debu yang berada di tengah dari robot dan juga lambatnya robot menyesuaikan posisi pada set point yang telah ditentukan.
4.
KESIMPULAN
Setelah melakukan pengujian dan analisa dari kecepatan motor DC menggunakan logika
fuzzy dan tingkat kebersihan yang dicapai oleh robot maka dapat disimpulkan bahwa tingkat kebersihan maksimal yang dicapai oleh robot dalam selang waktu rata-rata 1 menit 11 detik adalah 77,4%. Dengan daya 2 buah baterai sebesar 9,6V(3000mAH), vacuum cleaner
hanya dapat berfungsi secara baik selama 10 menit. Adapun saran yang diharapkan dapat berguna bagi penelitian selanjutnya agar dapat dikembangkan lebih lanjut yaitu penggunaan baterai lipo atau jenis baterai lainnya untuk efisiensi kerja robot dalam jangka waktu yang cukup lama.
5.
DAFTAR PUSTAKA
[1] Jatmiko, W, Mursanto, P, Tawakal, M,Il, Alvissalim, M,S, Hafidh, A, Budianto, E, Kurniawan, M,N, Ahfa, K, Danniswara, K, Ma‟sum, M,A, Hermawan, I, Jati, G. .
Robotika : Teori dan Aplikasi. Fakultas Ilmu Komputer. Universitas Indonesia.2012.
[2] Gates, B. „A Robot in Every Home‟, Scientific American Magazine. pp 44-51.2007.
[3] Mutijarsa, K & Ahmad, A, S. „Robot Dalam Rumah Tinggal - Membangun Robot Cerdas Penghisap Debu‟. Sekolah Teknik Elektro dan Informatika. Institut Teknologi Bandung.2008.
[4] “Pemodelan Dasar Sistem Fuzzy”. URL: http://socs.binus.ac.id/2012/03/02/pemodel an-dasar-sistem-fuzzy/. Diakses pada 9 Juli 2014
[5] Pitowarno, E. Robotika, Desain, Kontrol, dan Kecerdasan Buatan. Penerbit Andi: Yogyakarta. 2006.
[6] “Arduino Board Uno”. URL: http://arduino.cc/en/Main/arduinoBoardUn o, Di akses pada 09 Mei 2014.
[7] Satria, Budi dkk. Robot Pembersih Debu Otomatis. Jurnal Teknik Komputer Vol. 20 No.1 Februari 2012: 15 - 22
[8] Waqar, Tayyab. Fuzzy Logic Controlled Automatic Vacuum Cleaner, Journal of Engineering And Technology Research, 2014, 2 (2):93-100