TUGAS AKHIR
PENGUJIAN KEHANDALAN LM 35 SEBAGAI SENSOR TEMPERATUR Diajukanuntukmelengkapitugasdanmemenuhisyaratmemperolehgelarahlimadya
JOHANNES NAINGGOLAN 082408040
PROGRAM STUDI D-III FISIKA INSTRUMENTASI DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
PERSETUJUAN
Judul : PENGUJIAN KEHANDALAN LM 35 SEBAGAI
SENSOR
TEMPERATUR
Kategori : TUGAS AKHIR
Nama : JOHANNES NAINGGOLAN
No Induk Mahasiswa : 082408040
Program Studi : DIPLOMA III (D3) FISIKA INSTRUMENTASI Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (FMIPA) UNIVERSITAS SUMATERA UTARA
Diluluskan di Medan, 19 Juli 2013
Disetujui oleh :
Diketahui:
Ketua Program Studi D-3 Pembimbing
Fisika Instrumentasi
PERNYATAAN
PENGUJIAN KEHANDALAN LM 35 SEBAGAI SENSOR TEMPERATUR
TUGAS AKHIR
Saya mengakui bahwa Laporan Tugas Akhir ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2013
Johannes Nainggolan
PENGHARGAAN
Puji dan Syukur penulis sampaikan kepada Tuhan Yang Maha Kuasa karena atas berkat kasih dan karunia-Nya, Sehingga penulis dapat menyelesaikan Laporan Tugas Akhir dalam waktu yang telah ditetapkan.
Ucapan terima kasih penulis sampaikan kepada Bapak Drs. Kurnia Brahmana, M.Si selaku dosen pembimbing pada penyelesaian Laporan Tugas Akhir ini, yang telah memberikan panduan dan perhatian kepada penulis untuk menyempurnakan laporan tugas akhir ini. Ucapan terima kasih juga ditujukan kepada Ketua dan Sekretaris Departemen Dr. Marhaposan Situmorang,M.Sc, Ketua Jurusan program studi Fisika Instrumentasi Dr. Susilawati, M.Si, Dekan Dan Pembantu Dekan Fakultas Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara, Semua Dosen pada Departemen fisika FMIPA USU, pegawai di FMIPA USU.
Akhirnya tidak terlupakan kepada Bapak dan Ibu tercinta M. Nainggolan dan R. br Sagala atas doa dan kasih saying serta bantuan yang berupa materi maupun nonmateri yang telah diberikan kepada penulis selamaini, serta ketiga adiksaya, yang sudah memberikan doa dan dorongan kepada penulis. Juga sahabat-sahabat saya Royanto, Oloan, Hasudungan, Immanuel, Harrys, dan Sri Lestari Siboro yang banyak membantu dalam doa dan dukungan serta rekan – rekan seperjuangan D3 Fisika Intrumentasi stambuk 08.
ABSTRAK
DAFTAR ISI
Halaman
Persetujuan ... i
Pernyataan. ... ii
Penghargaan ... iii
Abstrak ... iv
Daftarisi ... v
DaftarGambar ... vi
DaftarTabel... viii
DaftarGrafik ... ix
Bab 1 Pendahuluan 1.1. Latar Belakang ... 1
1.2. Rumusan Masalah ... 1
1.3. Tujuan Penulisan ... 2
1.4. Batasan Masalah ... 2
1.5. Sistematika Penulisan ... 2
Bab 2 Landasan Teori 2.1. Mikrokontroller ATMega 8535... 4
2.1.1.Sistem Minimum Mikrokontroller ... 6
2.1.2.Blok-Blok Sistem Minimum Mikrokontroller ... 6
2.2. Fitur ATMega 8535 ... 7
2.3. KonfigurasiATMega 8535 ... 11
2.4. Seven Segment ... 11
2.5.Program Code-Vision AVR ... 13
2.6.Sensor LM 35 ... 16
Bab 3 Rancangan Sistem 3.1. Diagram Blok Sistem ... 16
3.2. Rangkaian Power Supply ... 16
3.3. Rangkaian Sistem Minimum ATMega 8535. ... 17
3.4. Rangkaian Sensor LM 35 ... 18
3.5.Rangkaian Display 7 Segment ... 19
3.6. Flowchart Program ... 20
Bab 4 Pengujian Rangkaian 4.1. Pengujian Rangkaian Power Supply ... 21
4.2. Pengujian Sistem Minimum ATMega 8535 ... 21
4.3. Pengujian Sensor LM 35 ... 21
4.4. Pengujian 7 Segment ... 21
4.5. Program Code-Vision AVR ... 22
Bab 5 Kesimpulan dan Saran
5.1 Kesimpulan ... 33
5.2 Saran ... 33
Daftar Pustaka ... 34
DAFTAR GAMBAR
Gambar2.1. Program Memory... 5
Gambar2.2. Data Memory ... 5
Gambar2.3. Pin ATMega 8535 ... 9
Gambar2.4. Konfigurasi 7 Segment ... 13
Gambar2.5. Code Vision AVR... 13
Gambar2.6. Sensor LM 35 Grafik Akurasi terhadap Sensor LM 35 ... 15
Gambar3.1. Diagram Blok ... 16
Gambar3.2. Rangkaian Power Supply (PSA) ... 16
Gambar3.3. Rangkaian Skematik ATMega 8535... 17
Gambar3.4. LM 35 ... 19
DAFTAR TABEL
DAFTAR GRAFIK
ABSTRAK
BAB I
PENDAHULUAN
1.1Latar Belakang
Berbagai jenis teknologi telah banyak diciptakan oleh manusia untuk dapat mempermudah manusia dalam melakukan pekerjaannya. Sebaga salah satu teknologi yang berkembang ialah tekhnologi di bidang pengukuran suhu dan kelembaban. Alat pengukur suhu dan kelembaban sangat banyak diperlukan dalam hal-hal tertentu. Contohnya, gudang penyimpanan barang yang membutuhkan suhu dan kelembaban yang stabil agar keadaan barang tetap baik, pengukuran suhu ruangan pada suatu ruangan tertentu seperti kamar, ruang tamu, ruang belajar yang suhu dan kelembabannya harus diperhatikan dan banyak aplikasi lainnya.
Dalam hal ini penulis ingin membuat pengukuran suhu ruangan tampilan sevent segment berbasis mikrokontroller ATMEGA 8535, dengan pengaturan suhu menggunakan mikrokontroller ATMEGA 8535 sebagai pusat kendalinya. Hasil alat ini bekerja secara otomatis dengan merespon berapa suhu pada suatu ruangan yang dideteksi oleh sensor suhu, mikrokontroller kemudian memproses suhu tersebut dan memberikan output ke seven segment dan di tampilkan.
1.2 Rumusan Masalah
1.3 Tujuan Penulisan
Adapun tujuan penulisan Tugas Akhir ini adalah untuk :
1.Merancang suatu alat pengukuran suhu ruangan yang di tampilkan pada seven segment yang berbasis mikrokontroller ATMEGA 8535.
2.Mengetahui cara kerja sensor suhu (LM 35) pada Mikrokontroller ATMEGA 8535.
3.Memberikan penjelasan tentang penggunaan dan cara kerja LM 35 sebagai sensor suhu pada suatu ruangan berbasis ATMEGA 8535.
1.4 Batasan Masalah
Adapun yang menjadi batasan masalah dalam perancangan ini adalah :
1.Pembahasan mikrokontroller ATMEGA 8535
2.Pembahasan kehandalan LM 35 sebagai sensor temperatur.
3.Pembahasan hanya meliputi rangkaian Mikrokontroller ATMEGA 8535, LM 35, Seven segment beserta programnya.
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat sistematika pembahasan bagaimana sebenarnya prinsip kerja dari sebuah alat pengukuran suhu ruangan tampilan seven segment berbasis mikrokontroller ATMEGA 8535.
BAB I. PENDAHULUAN
BAB II. LANDASAN TEORI
Dalam bab ini dijelaskan tentang teori pendukung yang digunakan untuk pembahasan dan cara kerja dari rangkaian teori pendukung itu antara lain tentang mikrokontroller ATMEGA 8535, LM 35, bahasa program yang digunakan, serta cara kerja dari mikrokontroller ATMEGA 8535 dan komponen pendukung.
BAB III. RANCANGAN SISTEM
Pada bab ini akan dibahas perancangan dari alat, yaitu blok dari rangkaian , skematik dari masing-masing rangkaian dan diagram alir dari program yang diisikan ke mikrokontroller ATMEGA 8535.
BAB IV. PENGUJIAN RANGKAIAN
Pada bab ini akan dibahas pengujian rangkaian dan hasil pengujian dari masing-masing pada rangkaian serta diisikan program ke mikrokontroller ATMEGA 8535.
BAB V. KESIMPULAN DAN SARAN
BAB II
LANDASAN TEORI
2.1 Mikrokontroller ATMEGA 8535
Mikrokontroller merupakan sebuah single chip yang didalamnya telah dilengkapi dengan CPU (Central Processing Unit), RAM (Random Acces Memory), ROM (Read Only Memory), input dan output, timer/counter, serial com port secara spesifik digunakan untuk aplikasi-aplikasi control dan buka aplikasi serbaguna. Mikrokontroller umumnya bekerja pada frekuensi 4MHz – 40MHz. Perangkat ini sering digunakan untuk kebutuhan kontrol tertentu seperti pada sebuah penggerak motor. ROM (Read Only Memory) yang isinya tidak berubah meskipun IC kehilangan catu daya. Sesuai dengan keperluannya, sesuai dengan susunan MCS-51. Memori penyimpanan program dinamakan sebagai memory program. RAM (Random Acces Memory) isinya akan begitu sirna jika IC kehilangan catu dayadan dipakai untuk menyimpan data pada saat program bekerja. RAM yang dipakai untuk menyimpan data ini disebut sebagai memori data.
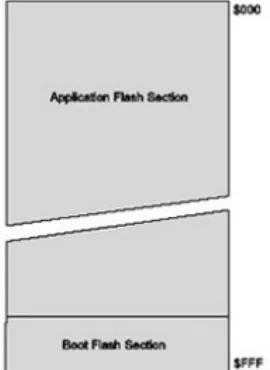
ATMEGA 8535 memiliki dua jenis memori, yaitu program memory dan data memory ditambah satu fitur tambahan yaitu EEPROM memory untuk penyimpan data. ATMEGA 8535 memiliki On-Chip In-System Reprogrammable Flash Memory untuk menyimpan program. Untuk alasan keamanan, program memory dibagi menjadi dua bagian, yaitu Boot Flash Section dan Application Flash Section. Boot Flash Section digunakan untuk menyimpan program Boot Loader, yaitu program yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan.
diprogram dari 128 kata sampai 1024 kata tergantung setting pada konfigurasi bit di register BOOTSZ. Jika Boot Loader diproteksi, maka program pada
Application Flash Section juga sudah aman.
Gambar 2.1. Program Memory
Gambar dibawah ini menunjukkan peta memori SRAM pada ATMEGA 8535. Terdapat 608 lokasi address data memori. 96 lokasi address digunakanuntuk Register File dan I/O memory sementara 512 likasi address lainnya digunakan untuk internal data SRAM. Register file terdiri dari 32 general purpose working register, I/O register terdiridari 64 register.
ATMEGA 8535 memiliki EEPROM 8 bit sebesar 512 byte untuk menyimpan data. Lokasinya terpisah dengan system address register, data register dan control register yang dibuat khusus untuk EEPROM. Alamat EEPROM dimulai dari $000 sampai $1FF.
2.1.1 Sistem Minimum Mikrokontroller
Sistem minimum mikrokontroller merupakan suatu rangkaian yang dirancang dengan menggunakan komponen-komponen seminimum mungkin untuk mendukung kerja mikrokontroller sesuai yang kita inginkan. Berbeda dengan sistem minimum mikroprosesor, sistem minimum mikrokontroller ini memiliki pendukung input/output yang programable dan RAM yang On-Chip. Sistem minimum ini dapat dibuat sangat fleksibel tergantung aplikasi yang akan dibuat.
2.1.2 Blok-Blok Sistem Minimum Mikrokontroller
Blok-blok yang terdapat pada sistem minimum mikrokontroller adalah sebagai berikut:
a.Mikrokontroller
b. Catu Daya
Blok ini berfungsi untuk memberikan tegangan catuan kesisminimum sebesar 5 Volt. Blok catu daya terdiri dari regulator 7805, kapasitor, resistor, dan indikator LED.
c. Input/Output
Blok ini berfungsi sebagai input dan output. Blok ini terdiri dari blok input (push button dan keypad) dan pada blok output (LED dan LCD).
d. Osilator
Blok ini berfungsi untuk membangkitkan sinyal clock. Blok oscillator terdiri dari kapasitor keramik dan kristal.
e. Serial
Blok ini digunakan untuk mengirimkan data secara serial. Blok serial terdiri dari IC MAX 232 dan port serial (DB 9). MAX232 merupakan komponen untuk mengubah tegangan level TTL menjadi lebih tinggi ke level RS232 sebelum data tersebut ditransmisikan secara serial. Tujuan dari MAX232 adalah agar data yang dikirimkan tersebut tidak habis di tengah jalan.
2.2 Fitur ATMEGA 8535
Kapabilitas detail dari ATMEGA 8535 adalah sebagai berikut :
1. Sistem mikroprosesor 8 bit berbasis RISC dengan kecepatan maksimal
2. Kapabilitas memori flash 8 KB, SRAM sebesar 512 byte, dengan EEPROM (Elektrically Erasable Programable Read Only Memory) sebesar 512 byte.
3. ADC internal dengan fidelitas 10 bit sebanyak 8 chanel.
4. Portal komunikasai serial (USART) dengan kecepatan maksimal 2,5
Mbps.
5. Enam pilihan mode sleep menghemat menggunakan daya listrik.
2.3 Konfigurasi ATMEGA 8535
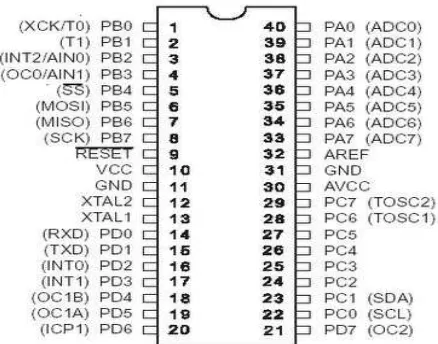
Konfigurasi pin ATMEGA 8535 bisa dilihat pada gambar dibawah ini. Dari gambar tersebut dapat dijelaskan secara fungsional konfigurasi pin ATMEGA 8535 sebagai berikut :
1. VCC merupan pin yang berfungsi sebagai pin masukan catu daya.
2. GND merupakan pin ground.
3. Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC.
4. Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu Timer/Counter, komparator analog, dan SPI.
5. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator analog, dan Timer Oscilat.
6. Port D (PD0..PD7) merupakan pin I/O dua arah dan fungsi khusus, yaitu
komparator analog, interupsi eksternal, komunikasi serial.
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroller.
8. XTAL1 dan XTAL2 merupakan pin masukan clock eksternal.
10. AREF merupakan pin masukan tegangan referensi ADC.
Gambar 2.3. Pin ATMEGA 8535
Berikut adalah penjelasan fungsi tiap kaki :
1. PORT A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per-bit). Output buffer Port A dapat memberi arus 20mA dan dapat mengendalikan display LED secara langsung. Data Direction Register Port A (DDRA) harus disetting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai ouput. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter.
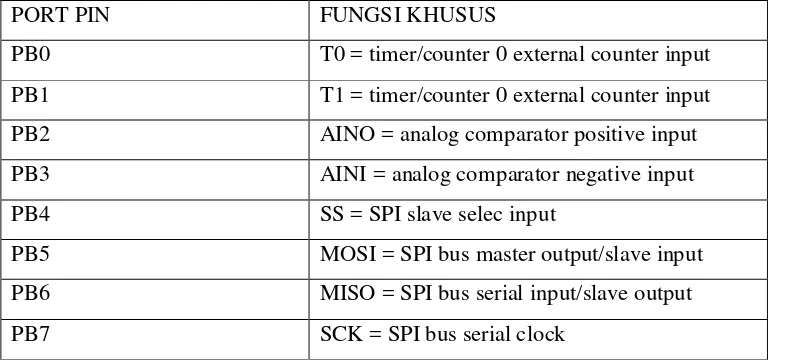
2. PORT B
memiliki untuk fungsi-fungsi alternatif khusus seperti yang terlihat pada tabel berikut.
Tabel 2.3 Konfigurasi pin Port B ATMEGA 8535
PORT PIN FUNGSI KHUSUS
PB0 T0 = timer/counter 0 external counter input PB1 T1 = timer/counter 0 external counter input
PB2 AINO = analog comparator positive input
PB3 AINI = analog comparator negative input
PB4 SS = SPI slave selec input
PB5 MOSI = SPI bus master output/slave input PB6 MISO = SPI bus serial input/slave output
PB7 SCK = SPI bus serial clock
3. PORT C
Merupakan 8-bit directional Port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per-bit). Output buffer Port C Dapat memberikan arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum port C digunakan. Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, DUA pin port C (PC6 dan PC7) juga memiliki fungsi alternatif sebagai ocilator untuk timer/counter2.
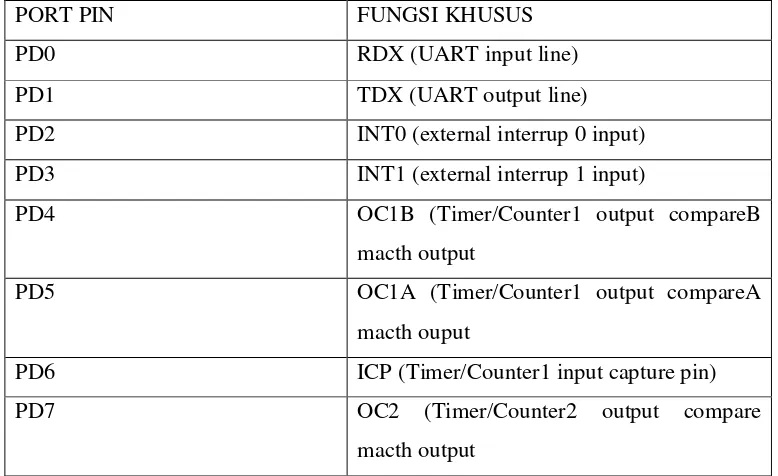
4. PORT D
yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, DUA pin port D juga memiliki untuk fungsi-fungsi alternatif khusus.
Tabel 2.4. Konfigurasi Pin Port D ATMEGA 8535
PORT PIN FUNGSI KHUSUS
PD0 RDX (UART input line)
PD1 TDX (UART output line)
PD2 INT0 (external interrup 0 input)
PD3 INT1 (external interrup 1 input)
PD4 OC1B (Timer/Counter1 output compareB
macth output
PD5 OC1A (Timer/Counter1 output compareA
macth ouput
PD6 ICP (Timer/Counter1 input capture pin)
PD7 OC2 (Timer/Counter2 output compare
macth output
5. RESET
RST pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka sistem akan di-reset.
6. XTAL1
XTAL1 adalah masukan ke inverting oscilator amplifier dan input ke internal clock operating circuit.
7. XTAL2
XTAL2 adalah output dari inverting oscilator amplifier.
8. AVCC
9. AREF
AREF adalah kaki masukan referensi bagi A/D Counverter. Untuk operasional ADC, suatu level tegangan antara AGND dan AVCC harus diberikan ke kaki ini.
10 AGND
AGND adalah kaki untuk analog groud. Hubungkan kaki ini ke GND, kecuali jika board memiliki analog ground yang terpisah.
2.4 Seven segment
Peraga / penampil 7 segmen adalah komponen elektronika yang berfungsi untuk mengkodekan data dari bahasa mesin kedalam bentuk tampilan data desimal. Peraga / penampil 7 segmen pada dasarnya adalah konfigarasi LED yang disusun sedemikian rupa sehingga nyala dari LED tersebut dapat membentuk karakter angka desimal. Struktur tampilan dari peraga / penampil 7 segmen tersebut dilabelkan dari a sampai g yang dapat menampilkan 10 karakter bilangan decimal pertama dari 0 sampai 9. Konstruksi dari penampil 7 segmen ditunjukan pada gambar2.4. Gambar Konstruksi peraga / penampil 7 Segmen merupakan susunan dari beberapa LED yang disusun sedemikian rupa sehingga menghasilkan konstruksi seperti diatas.
untuk mendapatkan arus bias LED yang stabil pada setiap perubahan karakter tampilan pada penampil 7 segment.
Gambar 2.4 konfigusari 7 segment
2.5 Program Codvision AVR
Untuk megaktifkan micro sistem akusisi data, penerima sinyal control dan sistem transmisi data maka terlebih dahulu mikrokontroller tersebut diberi program dengan cara mendownload program yang terlebih dahulu kita buat dengan bahasa C pada Code Vision AVR.
Software Code Vision AVR merupakan C Compiler untuk mikrokontroller AVR. Pada Code Vision telah disediakan editor yang berfungsi untuk membuat program dalam bahasa C, setelah melakukan proses kompilasi kita dapat mengisikan program yang telah dibuat kedalam memori mikrokontroller menggunakan programmer yang telah disediakan oleh Code Vision AVR. Programmer yang didukung oleh Code Vision Programmer Cable dapat diintegrasik dengan Code Vision AVR, terlebih dahulu harus dilakukan konfigurasi sebagai berikut :
- Jalankan software Code Vision AVR.
- Pilih menu setting. Programmer.
- Pilih tipe programmer.
- Lalu klik tombol OK.
Catatan: Proses ini hanya dapat dilakukan pada saat ada project yang telah dibuat atau dibuka.
Tekan Shift+F9, download ke target board dengan cara klik pada tombol program.
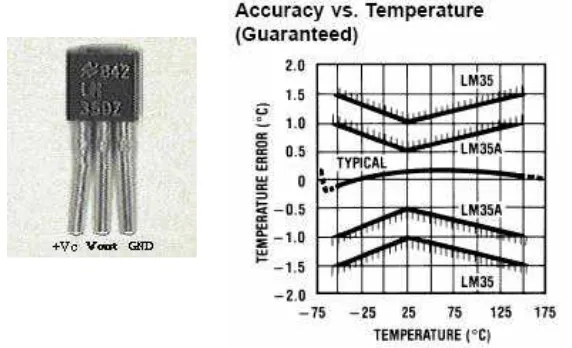
2.6 SENSOR LM 35
sekitar ± 1,4°C; dan memiliki impedansi keluaran yang kecil, 0,1 W untuk beban 1 mA.
BAB III
RANCANGAN SISTEM
3.1 DIAGRAM BLOK SISTEM
Gambar 3.1 Gambar Blok Diagram Pengujian Kehandalan LM 35
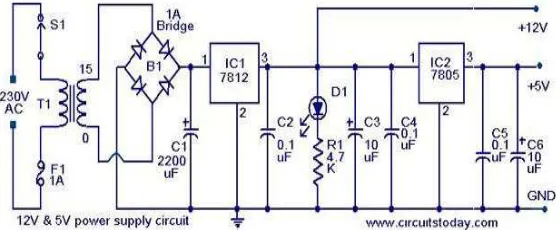
3.2 Rangkaian Power Supply (PSA)
Rangkaian power supplay berfungsi mensupplay arus tegangan keseluruh rangkaian yang ada. Rangankaian PSA yang dibuat terdiri dari dua keluaran, yaitu 5 volt dan 12 volt, keluara 5 volt digunakan untuk mensupplay tegangan keseluruh rangkaian, sedangkan 12 volt digunakan untuk mensupplay tegangan pada aplikasi yaitu rangkaian Seven Segment. Rangkaian power supplay ditunjukkan pada gambar berikut ini:
Gambar 3.2 Rangkaian Power Supplay(PSA)
Trafo CT merupakan trafo stepdown yang berfungsi untuk menurunkan tegangan dari 220 volt AC menjadi 12 volt AC. Kemudian 12 volt AC akan
M ikrokont roller
ATM ega 8535 LM 35
PSA
diserahkan dengan menggunakan dua buah dioda, selanjutnya 12 volt DCakan diratakan oleh kapasitor 2200µF. Regulator tegangan 5 volt (LM7805CT) digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebagai indikator apabila PSA dinyalakan. Transistor PNP TIP 32 disini berfungsi untuk mensupplay arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar. Tegan 12 volt DC langsung diambil dari keluaran 2 buah dioda penyearah.
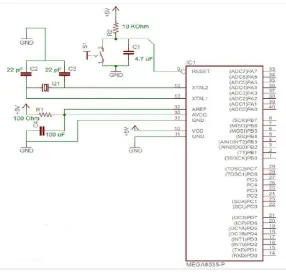
3.3 Rangkaian Skematik Sistem Minimum Mikrokontroller ATMEGA8535
Gambar 3.3 Rangkaian Skematik Sistem Minimum Mikrokontroler ATMEGA 8535
kapasitor 30pF. XTAL ini akan mempengaruhi kecepatan mikrokontroller Atmega 8535 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset (aktif rendah). Pulsa tradisi dari dari tinggi ke rendah akan me-reset mikrokontroller ini.
Untuk men-download file heksadesimal ke mikrokontroller , Mosi, Miso, Sck, Reset, Vcc, dan Gnd dari mikrokontroller dihubungkan ke RJ45. RJ45 sebagai konektor yang dihubungkan ke ISP Programmer. Dari ISP Programmer
ini lah dihubungkan ke kompoter melalui port paralel. Kaki Mosi, Miso, Sck, Reset, Vcc dan Gnd pada mikrokontroller terletak pada kaki 6, 7, 8, 9, 10 dan 11. Apabila terjadi keterbalikan pemasangan jalur ke ISP programmer, maka pemograman mikrokontroller tidak dapat dilakukan karena mikrokontroller tidak akan bisa merespon.
3.4 Rangkaian Sensor LM 35
Sensor suhu (temperature) pada tugas akhir ini menggunakanLM35, dimana output dari LM35 ini dapat memberikan output 8-bit data yang menyatakan kondisi perubahan dari suhu lingkungan. Setiap terjadi perubahan suhu maka akan terjadi perubahan data output yang dihasilkan, dimana perubahan tersebut berupa perbedaan tegangan yang dihasilkan. LM 35 memiliki kelebihan-kelebihan sebagai berikut. Dikalibrasi langsung dalam celcius memiliki faktor skala linear + 10.0 mV/°C, memiliki ketepatan 0,5°C pada suhu +25°C seperti terlihat pada gambar 2.6 jangkauan maksimal suhu antara -55° sampai +150°C, cocok untuk aplikasi jarak jauh, harga yang cukup murah, bekerja pada tegangan catu 4 sampai 30 Volt memiliki arus drain kurang dari 60 uA pemanasan sendiri yang lambat (low self – heating), 0,08°C diudara diam ketidak linearan hanya sekitar ±1,4°C; dan memiliki impedansi keluaran yang kecil, 0,1 W untuk beban 1 mA.
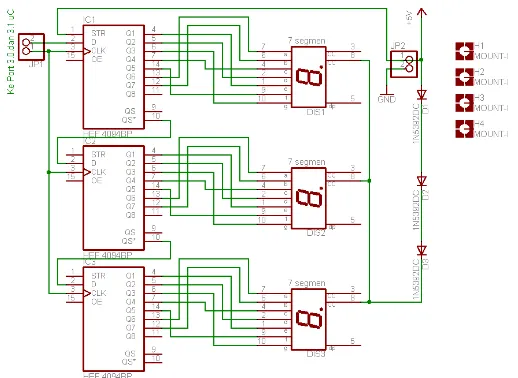
3.5 Rangkaian Display 7 Segmen
Rangkaian skematik Display 7 segmen (Seven Segment) dapat dilihat pada gambar 3.10. Display ini menggunakan 3 buah seven segment yang dihubungkan ke IC HEF 4094BP yang merupakan IC serial to paralel. IC ini akan merubah 8 bit data serial yang masuk menjadi keluaran 8 bit data paralel. Rangkaian ini dihubungkan dengan P3.0 dan P3.1 AT89C2051.P3.0 merupakan fasilitas khusus pengiriman data serial yang disediakan oleh mikrokontroler AT89C2051.Sedangkan P3.1 merupakan sinyal clock untuk pengiriman data serial.
[image:30.612.182.441.416.605.2]Pada rangkaian display ini digunakan tiga buah dioda yang berfungsi untuk menurunkan tegangan supply untuk seven segment. Satu buah dioda 5392 dc dapat menurunkan tegangan sekitar 0,6 volt. Jadi, apabila dioda yang digunakan tiga buah maka tegangan yang dapat diturunkannya 1,8 volt. Tegangan ini diturunkan agar umur seven segment lebih tahan lama dan karena tegangan maksimum seven segment adalah 3,7 volt.
BAB 4
PENGUJIAN RANGKAIAN
4.1 PENGUJIAN RANGKAIAN POWER SUPPLAY ADAPTOR (PSA)
Pengujian rangkaian ini dengan mengukur tegangan keluaran dari power supply menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Setelah itu rangkaian power supply dihubungkan ke sumber arus listrik dan saklar ON/OFF nya diaktifkan ke posisi ON.
4.2 Pengujian Sistem Minimum ATMega 8535
Karena pemrograman robot menggunakan mode ISP (In System Programming) mikrokontroler harus dapat diprogram langsung pada papan rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program downloader.Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh program downloader yaitu ATMega8535.
4.3 Pengujian Sensor LM 35
Sensor ini bekerja dengan cukup baik, Sensor suhu LM 35 dapat mendeteksi suhu suatu ruangan tersebut. Tetapi dalam pengujian ini, sensor yang ditampilkan pada 7 segment berupa data yang tetap yang telah diatur sebelumnya dari push buttom, tetapi setelah kita hidupkan, kita masih dapat juga mengubahnya dengan mengatur push buttom tersebut.
4.4 Pengujian Seven Segment
setiap segment menunjukkan bahwa 7 segment dapat menyala dengan baik. Pengujian 7 segment juga dapat dilakukan dengan menggunakan program codevision AVR.
4.5 Program Code-Vision AVR
/******************************************************* This program was created by the
CodeWizardAVR V2.60 Standard Automatic Program Generator
© Copyright 1998-2012 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
Project : Version :
Date : 12/20/2012 Author :
Company : Comments:
Chip type : ATmega8535 Program type : Application
AVR Core Clock frequency: 7.372800 MHz Memory model : Small
External RAM size : 0 Data Stack size : 128
*******************************************************/
#include <mega8535.h> #include <delay.h> #include <std_tool_sio.h>
// Declare your global variables here
unsigned char s, m, j; eeprom unsigned char exp;
void disp (unsigned char n) {
if (n == 0)shift_out (0x81); if (n == 1)shift_out (0xcf); if (n == 2)shift_out (0x92); if (n == 3)shift_out (0x86); if (n == 4)shift_out (0xcc); if (n == 5)shift_out (0xa4); if (n == 6)shift_out (0xa0); if (n == 7)shift_out (0x8f); if (n == 8)shift_out (0x80); if (n == 9)shift_out (0x84); }
void t_out (unsigned int ttt) {
unsigned char rat, pul, sat, sisa; rat = ttt/100;
sisa = ttt - (rat * 100); pul = sisa/10;
sat = sisa%10; disp(rat); disp(pul); disp(sat); }
// External Interrupt 2 service routine
// Place your code here
}
// Timer 0 overflow interrupt service routine interrupt [TIM0_OVF] void timer0_ovf_isr(void) {
// Reinitialize Timer 0 value TCNT0=0x4C;
// Place your code here PORTD = 0x55; }
// Timer1 overflow interrupt service routine interrupt [TIM1_OVF] void timer1_ovf_isr(void) {
// Reinitialize Timer1 value TCNT1H=0x1F00 >> 8; TCNT1L=0x1F00 & 0xff; // Place your code here PORTD = 0xaa; s++;
if (s > 117) { s = 0; m++; if (m > 117) { m = 0; j++;
if (j > 120) exp = 1; }
#define ADC_VREF_TYPE ((0<<REFS1) | (1<<REFS0) | (0<<ADLAR))
// Read the AD conversion result
unsigned int read_adc(unsigned char adc_input) {
ADMUX=adc_input | ADC_VREF_TYPE;
// Delay needed for the stabilization of the ADC input voltage delay_us(10);
// Wait for the AD conversion to complete while ((ADCSRA & (1<<ADIF))==0); ADCSRA|=(1<<ADIF);
return ADCW; }
void main(void) {
// Declare your local variables here unsigned int t, t0, t1, t2, t3, t4, t5;
// Input/Output Ports initialization // Port A initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRA=(0<<DDA7) | (0<<DDA6) | (0<<DDA5) | (0<<DDA4) | (0<<DDA3) | (0<<DDA2) | (0<<DDA1) | (0<<DDA0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) | (0<<PORTA4) | (0<<PORTA3) | (0<<PORTA2) | (0<<PORTA1) | (0<<PORTA0);
// Port B initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) | (0<<DDB3) | (0<<DDB2) | (0<<DDB1) | (0<<DDB0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
// Port C initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=Out Bit3=Out Bit2=Out Bit1=In Bit0=In DDRC=(0<<DDC7) | (0<<DDC6) | (0<<DDC5) | (1<<DDC4) | (1<<DDC3) | (1<<DDC2) | (0<<DDC1) | (0<<DDC0);
// State: Bit7=T Bit6=T Bit5=T Bit4=0 Bit3=0 Bit2=0 Bit1=T Bit0=T
PORTC=(0<<PORTC7) | (0<<PORTC6) | (0<<PORTC5) | (0<<PORTC4) | (0<<PORTC3) | (0<<PORTC2) | (0<<PORTC1) | (0<<PORTC0);
// Port D initialization
// Function: Bit7=Out Bit6=Out Bit5=Out Bit4=Out Bit3=Out Bit2=Out Bit1=Out Bit0=Out
DDRD=(1<<DDD7) | (1<<DDD6) | (1<<DDD5) | (1<<DDD4) | (1<<DDD3) | (1<<DDD2) | (1<<DDD1) | (1<<DDD0);
// State: Bit7=0 Bit6=0 Bit5=0 Bit4=0 Bit3=0 Bit2=0 Bit1=0 Bit0=0
PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) | (0<<PORTD4) | (0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) | (0<<PORTD0);
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: 7.200 kHz // Mode: Normal top=0xFF // OC0 output: Disconnected // Timer Period: 25 ms
TCCR0=(0<<WGM00) | (0<<COM01) | (0<<COM00) | (0<<WGM01) | (1<<CS02) | (0<<CS01) | (1<<CS00);
TCNT0=0x4C; OCR0=0x00;
// Noise Canceler: Off
// Input Capture on Falling Edge // Timer Period: 0.5 s
// Timer1 Overflow Interrupt: On // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off
TCCR1A=(0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) | (0<<WGM11) | (0<<WGM10);
TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (0<<WGM12) | (0<<CS12) | (1<<CS11) | (1<<CS10);
TCNT1H=0x1F; TCNT1L=0x00; ICR1H=0x00; ICR1L=0x00; OCR1AH=0x00; OCR1AL=0x00; OCR1BH=0x00; OCR1BL=0x00;
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer2 Stopped // Mode: Normal top=0xFF // OC2 output: Disconnected ASSR=0<<AS2;
TCCR2=(0<<WGM20) | (0<<COM21) | (0<<COM20) | (0<<WGM21) | (0<<CS22) | (0<<CS21) | (0<<CS20);
TCNT2=0x00; OCR2=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
// External Interrupt(s) initialization // INT0: Off
// INT1: Off // INT2: On
// INT2 Mode: Falling Edge
GICR|=(0<<INT1) | (0<<INT0) | (1<<INT2);
MCUCR=(0<<ISC11) | (0<<ISC10) | (0<<ISC01) | (0<<ISC00); MCUCSR=(0<<ISC2);
GIFR=(0<<INTF1) | (0<<INTF0) | (1<<INTF2);
// USART initialization // USART disabled
UCSRB=(0<<RXCIE) | (0<<TXCIE) | (0<<UDRIE) | (0<<RXEN) | (0<<TXEN) | (0<<UCSZ2) | (0<<RXB8) | (0<<TXB8);
// Analog Comparator initialization // Analog Comparator: Off
ACSR=(1<<ACD) | (0<<ACBG) | (0<<ACO) | (0<<ACI) | (0<<ACIE) | (0<<ACIC) | (0<<ACIS1) | (0<<ACIS0);
// ADC initialization
// ADC Clock frequency: 57.600 kHz // ADC Voltage Reference: AVCC pin // ADC High Speed Mode: Off
// ADC Auto Trigger Source: Timer0 Overflow ADMUX=ADC_VREF_TYPE;
ADCSRA=(1<<ADEN) | (0<<ADSC) | (1<<ADATE) | (0<<ADIF) | (0<<ADIE) | (1<<ADPS2) | (1<<ADPS1) | (1<<ADPS0);
SFIOR=(1<<ADHSM) | (1<<ADTS2) | (0<<ADTS1) | (0<<ADTS0);
// SPI initialization // SPI disabled
// TWI initialization // TWI disabled
TWCR=(0<<TWEA) | (0<<TWSTA) | (0<<TWSTO) | (0<<TWEN) | (0<<TWIE);
// Global enable interrupts #asm("sei")
t5 = 0; t4 = 0; t3 = 0; t2 = 0; t1 = 0; t0 = 0;
if (exp == 0xff) exp = 0;
while (1) {
// Place your code here t5 = t4;
t4 = t3; t3 = t2; t2 = t1; t1 = t0;
t0 = read_adc(0) * 5;
t = (t0 + t1 + t2 +t3 + t4 + t5)/6;
delay_ms(100); soe = 0;
t_out(t); soe = 1;
delay_ms(100); if (exp == 1)
{ disp(123);
} } }
4.6 Data Pengukuran
Untuk Air raksa
TAR = 29,5 + 31,2 + 32,4 + 33,1 + 34,9 = = = 32,2
= 32,2 1 = 32,2 – 29,5 = 2,7
2 = 32,2 – 31,2 = 1
3 = 32,2 – 32,4 = 0,2
4 = 32,2 – 33,1 = 0,9
5 = 32,2 – 34,9 = 2,7
= 2,7 + 1 + 0,2 + 0,9 + 2,7 = 7,5 ∆ = = 1,5
Nilai TAR = 32,2 1,5
Untuk Termokopel
Ttermo = 29,2 + 30,7 + 31,9 + 32,6 + 34,4 = = = 31,7
= 31,7
1 = 31,7 – 29,2 = 2,5 2 = 31,7 – 30,7 = 1
3 = 31,7 – 31,9 = 0,2
4 = 31,7 – 32,6 = 0,9
5 = 31,7 – 34,4 = 2,7
∆ =2,5 + 1 + 0,2 + 0,9 + 2,7 = 7,3
Nilai Ttermo = 31,7 1,46
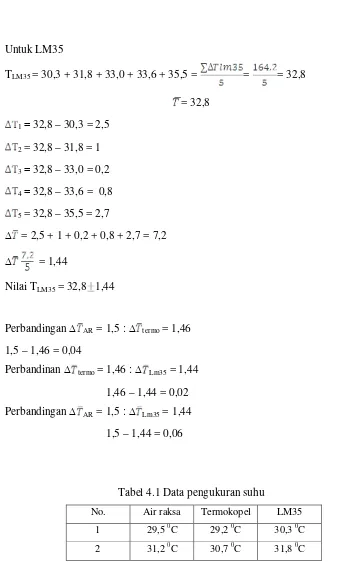
Untuk LM35
TLM35 = 30,3 + 31,8 + 33,0 + 33,6 + 35,5 = = = 32,8
= 32,8
1 = 32,8 – 30,3 = 2,5 2 = 32,8 – 31,8 = 1
3 = 32,8 – 33,0 = 0,2 4 = 32,8 – 33,6 = 0,8 5 = 32,8 – 35,5 = 2,7
∆ = 2,5 + 1 + 0,2 + 0,8 + 2,7 = 7,2
∆ = 1,44
Nilai TLM35 = 32,8 1,44
Perbandingan ∆ AR = 1,5 : ∆ termo = 1,46
1,5 – 1,46 = 0,04
Perbandinan ∆ termo = 1,46 : ∆ Lm35 = 1,44 1,46 – 1,44 = 0,02 Perbandingan ∆ AR = 1,5 : ∆ Lm35 = 1,44
[image:42.612.128.467.137.699.2]1,5 – 1,44 = 0,06
Tabel 4.1 Data pengukuran suhu
3 32,4 0C 31,90C 33,00C 4 33,1 0C 32,6 0C 33,6 0C 5 34,9 0C 34,4 0C 35,5 0C
Grafik 4.1 Pengukuran suhu
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari evaluasi hasil kerja alat dapat diambil beberapa kesimpulan dalam tugas akhir ini.
Kesimpulan yang diambil oleh penulis adalah :
1. Pengukuran suhu ruangan menggunakan sensor LM 35 adalah sensor temperatur yang belum bisa dikatakan baik karena data pengukuran LM 35 ternyata berbeda dengan termokopel dan air raksa.
5.2 Saran
1. Dengan beberapa pengembangan dan penyempurnaan sistem dari alat ini akan dapat lebih baik lagi hasilnya.
2. Penggunaan sensor temperatur yang lebih bagus yang dapat mengukur suhu sampai batas maksimal yang kita inginkan agar mendapatkan data pengukuran lebih baik.
3. Diharapakan pembaca dapat memberi saran dan kritik terhadap penulis.
DAFTAR PUSTAKA
Bejo, Agus. 2005. C &AVR Rahasia Kemudahan Bahasa C dalam mikrokontroller ATMega 8535.Edisi Pertama. Yogyakarta: Penerbit Gava Media.
Lingga, W. 2006.Belajar sendiri Pemograman AVR ATMega 8535. Yogyakarta: Andi Offset.
Budiharto, Widodo. 2005. Panduan Lengkap Belajar Mikrokontroller Perancangan Sistem dan Aplikasi Mikrokontroller. Jakarta: PT Elex media Komputindo.