ABSTRAK
PROTOTYPE PENGGERAK PINTU PAGAR OTOMATIS BERBASIS ARDUINO UNO ATMEGA 328P DENGAN SENSOR SIDIK JARI
Oleh
YOGIE EL ANWAR
Penelitian ini bertujuan untuk merancang prototype penggerak pintu pagar otomatis dengan koding aktivasi sensor sidik jari. Pengendalian kecepatan yang ditentukan besarnya oleh beban pagar (kg) menjadi bagian yang diamati.
Prototype penggerak pintu pagar otomatis mempunyai spesifikasi beban pagar 10 kg, panjang lintasan pagar 2 m, diameter gir 5 cm, panjang rantai 0,95 m, jumlah mata gigi gir 14, daya motor dc sebesar 300 watt, kecepatan putar 2000 rpm, tegangan masukkan dari 15,2 – 35 vdc dan sistem kontrol.
Hasil penelitian yang didapat untuk prototype adalah kecepatan putar optimal dan torsi optimal berada pada tegangan 18,3 – 21,6 vdc. Dengan spesifikasi prototype, motor dc yang digunakan dapat menggerakkan benda dengan beban pagar hingga maksimal 50 kg.
ABSTRACT
THE PROTOTPYE DRIVER OF AUTOMATIC GATE BASED ON ARDUINO UNO ATMEGA 328P WITH FINGERPRINT SENSOR
BY
YOGIE EL ANWAR
The aim of this research is to design a prototype driver of automatic gate by coding activation of fingerprint sensor. The speed control determined by the gate’s load (kg) becomes the observed part.
It has specification, 10 kg gate’s load, 2 m legth of gate’s rail, 5 cm gear’s diameter, 0,95 m chain lengths, 14 gearwheel, 300 watts motor dc power, 2000 rpm rational speed, input voltages from 15,2 to 35 Vdc, and control system.
The results of this research is found that the optimum rotational speed and torque are in 18,3 – 21,6 Vdc. With prototype’s specifications, motor dc used in this research can move the load of gate up to 50 kg.
PROTOTYPE
PENGGERAK PINTU PAGAR OTOMATIS
BERBASIS ARDUINO UNO ATMEGA 328P DENGAN SENSOR
SIDIK JARI
(Skripsi)
Oleh
YOGIE EL ANWAR
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
PROTOTYPE
PENGGERAK PINTU PAGAR OTOMATIS
BERBASIS ARDUINO UNO ATMEGA 328P DENGAN
SENSOR SIDIK JARI
Oleh
YOGIE EL ANWAR
Skripsi
Sebagai Salah Satu Syarat untuk Mencapai Gelar SARJANA TEKNIK
Pada
Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK UNIVERSITAS LAMPUNG
RIWAYAT HIDUP
Penulis adalah anak kedua dari tiga bersaudara yang dilahirkan dari pasangan Bapak Syaiful Anwar dan Ibu Eva Wati Elisa. Penulis dilahirkan di Bandar Lampung pada tanggal 7 Desember 1989. Pendidikan formal penulis dimulai di SD 1 Al-Azhar Way Halim pada tahun 1995 dan lulus pada tahun 2001. Pendidikan menengah pertama di SMP Negeri 9 Bandar Lampung diselesaikan pada tahun 2004. Dan pendidikan menengah akhir di SMA Negeri 5 Bandar Lampung yang diselesaikan pada tahun 2007.
Mahasiswa Badan Eksekutif Mahasiswa Universitas Keluarga Besar Mahasiswa Universitas Lampung (BEM U KBM UNILA) pada tahun 2010-2011. Penulis juga pernah terdaftar sebagai Kepala Dinas Hubungan Eksternal pada tahun 2011-2012 Badan Eksekutif Mahasiswa Fakultas Teknik Universitas Lampung (BEM FT UNILA). Pengalaman organisasi terakhir Penulis yaitu pernah terdaftar sebagai Menteri Luar Negeri Badan Eksekutif Mahasiswa Universitas Keluarga Besar Mahasiswa Universitas Lampung (BEM U KBM UNILA) pada tahun 2012-2013. Tahun 2012 saat menjadi Menteri Luar Negeri, Penulis mendapat kesempatan menjadi Tim Pengawas Eksternal Seleksi Penerimaan CPNSD Kemenkumham Lampung dengan Surat Keputusan dari Menkumham. Pada semester 5 penulis memilih konsentrasi Sistem Energi Elektrik (SEE) sebagai fokus dalam perkuliahan dan penelitian. Pada bulan Desember tahun 2011, penulis melaksanakan kerja praktek di PLTU Suralaya pada bagian Elektro Mekanika (Elmek). Pada saat kerja praktek penulis membuat laporan tentang Pemeliharaan Motor Operating Valve (MOV) Merek Limitorque Pada Unit 5-7 PLTU Suralaya.
HALAMAN PERSEMBAHAN
Dengan kerendahan hati yang tulus, kupersembahkan skripsi ini untuk:
1. Papa dan Mama, Hi. Syaiful Anwar, S.E. dan Hj. Eva Wati Elisa, karena engkaulah aku ada. Motivasi, semangat, dukungan, nasihat, air mata, senyum, dan tawa yang telah menghiasi hidupku. Maaf telah banyak mengecewakan. Semoga aku bisa membuat Papa dan Mama bangga serta bahagia.
2. Kakakku, Anggrela Anwar, karena dirimu aku termotivasi untuk menyelesaikan skripsi ini.
3. Adikku, Nabila Anwar, karena dirimu aku merasa termotivasi untuk menjadi kakak yang teladan, kakak terbaik, dan kakak panutan untukmu.
4. Teman dan sahabat, Imelda Sasti, karena dirimu yang banyak bersabar memberikan ilmumu, mendukungku, dan meluangkan waktumu untuk membantu menyelesaikan skripsi ini.
MOTO
“Dan orang-orang yang bersungguh-sungguh untuk (mencari keridhaan) Kami, benar-benar akan Kami tunjukkan kepada mereka jalan-jalan Kami. Dan sesungguhnya Allah benar-benar beserta orang-orang yang berbuat baik.” (QS. Al-‘Ankabut : 69)
Saya menciptakan hidup saya dengan melangkah keluar dari batasan-batasan yang diberikan orang lain. (Oprah Winfrey)
Hidup adalah ketidakpastian, tidak tahu apa yang akan terjadi dan bagaimana terjadi. Kita hanya bisa menduga. Kita mungkin salah melangkah, tetapi kita harus tetap melangkah dalam gelap. (Agnes De Mille)
Ciri hidup itu adalah berubah dan bertumbuh, tidak ada kemajuan yang bisa Anda raih tanpa melakukan perubahan. (Jamil Azzaini)
SANWACANA
Mudah-mudahan Allah selalu melimpahkan taufiq dan hidayahNya kepada penulis, sehingga dapat menyelesaikan tugas akhir ini dan semoga selaku muslim kita dapat mengikuti serta menteladani pola kehidupan Nabi dan para sahabatnya sampai akhir zaman kelak.
Skripsi dengan judul “Prototype Penggerak Pintu Pagar Otomatis Berbasis Arduni Uno ATmega 328P Dengan Sensor Sidik Jari” merupakan salah satu syarat untuk memperoleh gelar Sarjana Teknik pada Jurusan Teknik Elektro Fakultas Teknik Universitas Lampung.
Selama perkuliahan dan penelitian, penulis banyak mendapatkan pengalaman yang sangat berharga. Penulis juga telah mendapat bantuan baik moril, materil, bimbingan, petunjuk serta saran dari berbagai pihak baik secara langsung maupun tidak langsung. Untuk itu pada kesempatan ini penulis mengucapkan terima kasih kepada:
1. Bapak Prof. Dr. Suharno, M.Sc. selaku Dekan Fakultas Teknik Universitas Lampung;
3. Ibu Herlinawati, S.T, M.T. selaku Sekretaris Jurusan Teknik Elektro Universitas Lampung;
4. Bapak DR.ENG. Lukmanul Hakim, S.T., M.SC. selaku Pembimbing Akademik;
5. Bapak Ir. Noer Soedjarwanto, M.T. selaku Pembimbing Utama atas kesediaannya meluangkan waktu dan memberikan ilmu;
6. Bapak Ageng Sadnowo Repeliatno, S.T., M.T. selaku Pembimbing Kedua atas kesediaannya meluangkan waktu dan memberikan ilmu;
7. Bapak Ir. Abdul Haris, M.T. selaku Penguji Utama tugas akhir;
8. Seluruh Dosen Jurusan Teknik Elektro Universitas Lampung atas pengajaran dan bimbingannya yang diberikan selama ini kepada penulis;
9. Keluarga besar Teknik Elektro Universitas Lampung;
10. Semua pihak yang telah membantu serta mendukung penulis yang tidak dapat disebutkan satu per satu.
Semoga mendapatkan balasan yang setimpal dari Allah SWT dan semoga kita menjadi manusia yang berguna dan berkembang. Penulis menyadari bahwa skripsi ini tidak terlepas dari kesalahan dan jauh dari kesempurnaan, oleh karena itu masukan serta saran dan kritik yang membangun sangat penulis harapkan demi perbaikan dimasa yang akan datang.
Bandar Lampung, 27 November 2014 Penulis,
DAFTAR ISI
xiv
3.4.5 Pengujian Alat ... 44
3.4.5.1 Pengujian Sensor Sidik Jari ... 44
3.4.5.2 Pengujian Driver Relay ... 45
3.4.5.3 Pengujian Sensor Jarak PING ... 45
3.4.5.4 Pengujian Motor DC ... 46
3.5 Pengujian Keseluruhan Sistem ... 46
3.6 Analisis dan Simpulan, Serta Pembuatan Laporan ... 46
IV. HASIL DAN PEMBAHASAN ... 50
4.1 Prototype Pagar Otomatis ... 50
4.2 Data Hasil Penelitian... 51
4.3 Analisa Grafik Serta Analisis Regresi ... 54
4.3.1 Grafik Hubungan Tegangan Dengan Arus ... 54
4.3.2 Grafik Hubungan Tegangan Dengan Kecepatan ... 55
4.3.3 Grafik Hubungan Tegangan Dengan Waktu ... 55
4.4 Analisa Perhitungan Torsi Dengan Daya ... 56
4.5 Pembahasan... 62
V. SIMPULAN DAN SARAN ... 71
5.1 Simpulan ... 71
5.2 Saran ... 72
DAFTAR PUSTAKA ... 73
DAFTAR TABEL
Tabel Halaman
3.1 Desain rencana kontrol ... 39
4.1 Kecepatan dan waktu saat menggerakkan pagar kondisi forward ... 52
4.2 Kecepatan dan waktu saat menggerakkan pagar kondisi backward ... 53
4.3 Data hasil perhitungan torsi pada kondisi forward ... 58
4.4 Data hasil perhitungan torsi pada kondisi backward ... 60
4.5 Kondisi optimal saat forward ... 65
4.6 Kondisi optimal saat backward. ... 65
4.7 Perhitungan daya ke beban saat kondisi forward ... 68
4.8 Perhitungan daya ke beban saat kondisi backward ... 69
DAFTAR GAMBAR
2.15 Pengaruh penempatan konduktor ... 25
2.16 Prinsip kerja motor dc ... 26
2.17 Kurva torsi dan kecepatan ... 28
2.18 Grafik torsi dan kecepatan dengan luas daerah persegi ... 29
xvii
3.7 Rangkaian limit switch 1 dan 2 ... 34
3.8 Rangkaian motor dc ... 34
3.9 Rangkaian skematik prototype pagar otomatis ... 35
3.10 Sinyal digital saat proses penyimpanan ... 36
3.11 Sinyal digital saat pembacaan sidik jari tersimpan ... 37
3.12 Sinyal digital saat pembacaan sidik jari tidak tersimpan ... 37
3.13 Sinyal digital saat proses prototype dengan sidik jari tersimpan terbaca ... 38
3.14 Sinyal digital saat proses prototype dengan sidik jari tidak tersimpan ... 38
3.15 Kondisi pagar diam ... 40
3.16 Kondisi pagar membuka dan diam karena delay waktu... 40
3.17 Kondisi pagar dari membuka bergerak ke menutup tanpa benda menghalangi ... 40
3.18 Kondisi pagar yang diam saat benda menghalangi ... 40
3.19 Pagar yang terhubung dengan motor dc ... 44
3.20 Diagram alir sensor sidik jari ... 47
3.21 Diagram alir proses protorype berjalan... 48
3.22 Diagram alis sensor jarak ping ... 49
4.1 Prototype penggerak pintu pagar otomatis ... 50
4.2 Prosedur pengambilan data tegangan dan arus kondisi forward ... 51
4.3 Prosedur pengambilan data tegangan dan arus kondisi backward ... 52
4.4 Grafik tegangan terhadap arus ... 54
4.5 Grafik tegangan terhadap kecepatan ... 55
4.6 Grafik tegangan terhadap waktu ... 56
4.7 Grafik hubungan torsi terhadap kecepatan putar saat kondisi forward ... 59
I. PENDAHULUAN
1.1 Latar Belakang
Pintu pagar merupakan salah satu keamanan paling terdepan dalam menjaga suatu bangunan. Sebab pintu pagar merupakan pelapis pertama untuk melindungi suatu bangunan khususnya isi yang ada di dalamnya. Pintu pagar memiliki berbagai jenis dari jaman dahulu sampai sekarang dengan menggunakan kunci tambahan sebagai pengamanan ekstra. Hal ini pula tidak luput dari pelaku tindakan kriminal untuk memiliki cara mengatasi lemahnya perlindungan yang diberikan pengaman ekstra pada pagar.
Aplikasi sensor sidik jari sudah banyak digunakan sebagai sistem presensi. Seperti aplikasi sensor sidik jari untuk sistem presensi menggunakan Magic Secure 2500 (Naslim Lathif, 2001). Selain itu juga masih digunakan sebagai absensi, sensor sidik jari diaplikasikan untuk absensi pegawai rumah sakit umum daerah Meuraxa (Rina Maulida 2010).
2
penggerak pintu dengan dibantu mikrokontroler sebagai pusat pengendali sistem (Mujiman, 2008).
Cukup banyak aplikasi pengendalian yang dapat diimplementasikan menggunakan Arduino Uno Atmega 328P. Salah satunya seperti penelitian yang dibuat oleh Roza pada tugas akhirnya, yaitu membuat perancangan system pengaturan kecepatan menggunakan zig bee pro berbasis arduino uno atmega 328P (Roza Antoni, 2013).
Pada penelitian ini ingin dibuat kendali pintu otomatis yang memiliki sistem keamanan menggunakan sensor sidik jari, dengan kata lain diinginkan pintu dapat membuka hanya dengan kode dari sidik jari tertentu.
1.2Tujuan Dan Manfaat Penelitian
Penelitian ini bertujuan untuk:
1. Merancang prototype penggerak pintu pagar otomatis menggunakan sensor sidik jari. Sidik jari digunakan sebagai koding aktivasi penggerak motor. 2. Menganalisa konversi daya (watt) motor DC ke beban (kg) pintu pagar untuk
mengetahui berapa besar daya yang mampu menggerakkan beban pagar. 3. Menghitung kecepatan putar motor dc dan torsi motor dc yang optimal
3
Manfaat yang didapat dari penelitian ini adalah memberikan keamanan pada pintu pagar suatu bangunan dengan sensor sidik jari dan memberikan manfaat yang lebih efektif dan efisien pada pengguna aplikasi alat ini.
1.3Rumusan Masalah
Masalah yang akan dibahas pada penelitian ini adalah, bagaimana membuat prototype penggerak pintu pagar otomatis berbasis Arduino Uno Atmega 328P dengan sensor sidik jari. Masalah teknis yang diperhatikan adalah:
1. Sensor sidik jari membaca pola sidik jari yang sudah tersimpan di dalam memori.
2. Penggunaan driver relay sebagai pengendali dari Motor DC.
1.4 Batasan Masalah
Batasan masalah pada penelitian ini adalah:
1. Hanya menggunakan alat sensor sidik jari sebagai sistem keamanan, tidak membahas pola sidik jari.
2. Hanya menggunakan Driver relay sebagai pengendali motor dc untuk membuka dan menutup pagar, tidak lebih mendalam.
4
1.5 Hipotesa
Hipotesa dari penelitian ini adalah akan dapat direalisasikan prototype penggerak pintu pagar otomatis berbasis Arduino Uno Atmega 328P dengan sensor sidik jari sebagai keamanannya dan diketahui besar daya motor yang dibutuhkan beban yang akan digerakkan.
1.6 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut:
I. PENDAHULUAN
Berisi tentang latar belakang, tujuan dan manfaat penelitian serta rumusan dan batasan masalah.
II. TINJAUAN PUSTAKA
Memaparkan pustaka referensi yang akan digunakan penulis dalam mengerjakan Tugas Akhir.
III. METODOLOGI PENELITIAN
5
IV. HASIL DAN PEMBAHASAN
Menyajikan analisis data dan hasil perhitungan yang didapat.
V. KESIMPULAN DAN SARAN
II. TINJAUAN PUSTAKA
2.1. Sensor Sidik Jari
Sistem biometrik sidik jari merupakan sistem yang paling banyak digunakan saat ini, karena memiliki kecenderungan tingkat akurasi yang tinggi dan mudah diterapkan. Sifat yang dimiliki sidik jari antara lain:
1. Perennial nature, yaitu guratan-guratan pada sidik jari yang melekat pada kulit manusia seumur hidup.
2. Immutability, yaitu sidik jari seseorang tidak pernah berubah, kecuali mendapatkan kecelakaan yang serius.
3. Individuality, pola sidik jari adalah unik dan berbeda untuk setiap orang.
7
Ciri khas sidik jari yang digunakan adalah sidik jari yang diidentifikasi dengan cara menganalisis detail dari guratan-guratan sidik jari yang dinamakan
“minutiae” (Naslim Lathif, 2001). Minutiae berasal dari bahasa inggris yang artinya barang tidak berarti atau rincian tidak penting dan terkadang diartikan sebagai detil. Minutiae sebenarmya merupakan rincian sidik jari yang tidak penting bagi kita, tetapi bagi sebuah mesin sidik jari itu adalah detil yang diperhatikan.
Gambar 2.2 Definisi sidik jari.
8
Jadi, walaupun sidik jari terlihat seperti sama bila dilihat sekilas, buat penyidik terlatih atau dengan menggunakan software khusus akan terlihat perbedaannya.
Secara umum, sidik jari dapat dibedakan menjadi beberapa tipe menurut Henry Classification System, yaitu loop patern, whorl pattern, dan arch pattern. Hampir 2/3 manusia memiliki sidik jari dengan loop pattern, 1/3 lainnya memiliki sidik jari dengan whorl pattern, dan hanya 5-10% yang memiliki sidik jari dengan arch pattern. Pola-pola sidik jari seperti ini yang digunakan untuk membedakan sidik jari secara umum. Namun, untuk mesin pembaca sidik jari, perbedaan seperti ini tidak cukup. Karena itulah, mesin sidik jari dilengkapi dengan pengenalan lain yang disebut minutiae.
9
Gambar 2.4 Whorl Pattern.
Gambar 2.5 Loop Pattern.
10
sebuah lingkaran kecil). Mesin pemindai sidik jari akan mencari titik-titik ini dan membuat pola dengan menghubung-hubungkan titik-titik ini. Pola yang didapat dengan menghubungkan titik-titik inilah yang nantinya akan digunakan untuk melakukan pencocokan bila ada jari yang menempel pada mesin sidik jari. Jadi, sebenarnya mesin sidik jari tidak mencocokan pola yang didapat dari minutiae-minutiae ini. Mesin pemindai sidik jari bekerja dengan mengambil gambar dari sidik jari tersebut. Sebenarnya banyak cara dapat dilakukan untuk mengambil gambar sidik jari tersebut namun metode umum yang dilakukan adalah dengan 2 cara yaitu dengan sensor optikal dan kapasitansi.
Inti dari sensor optikal adalah dengan adanya CCD (Charge Couple Device) yang cara kerjanya sama seperti system sensor yang terdapat pada kamera digital dan camcorder. CCD merupakan chip silikon yang terbentuk dari ribuan atau bahkan jutaan diode fotosensitif yang disebut photosites, photodelements atau disebut juga piksel. Tiap photosite menangkap suatu titik objek kemudian dirangkai dengan hasil tangkapan photosite lain menjadi suatu gambar. Bila mengambil contoh pada
kamera, saat menekan tombol ‘capture’ pada kamera digital, sel pengukur
11
sebenarnya dalam format ‘grayscale’ atau monochrome dengan 256 macam
intensitas warna dari putih sampai hitam.
Sensor kapasitif bekerja berdasarkan prinsip pengukuran kapasitansi dari material yang dipindai. Material tersebut bisa saja besi, baja, alumunium, tembaga, kuningan bahkan hingga air. Berbeda dengan pemindai optikal yang menggunakan cahaya, pemindai kapasitif menggunakan arus listrik untuk mengukur besarnya kapasitas.
Gambar 2.6 Sensor kapasitif.
Diagram di atas menunjukkan sebuah sensor kapasitif sederhana. Dimana sensor dibuat dari beberapa chip semi konduktor pada sebuah sel yang tipis. Setiap sel memiliki tempat konduktor yang ditutupi dengan lapisan isolasi. Sensor tersebut terhubung dengan sebuah integrator yang dilengkapi dengan inverter penguat yang dapat menterjemahkan sehingga pada akhirnya akan membentuk sidik jari yang sedang dipindai. Setelah mesin pemindai sidik jari menyimpan image atau
gambar yang diambil, mesin kemudian melakukan ‘searching minutiae’ atau
12
Gambar 2.7 Searching minutiae.
Gambar 2.8 Before match.
13
Gambar 2.10 Matched result
Jika mesin sidik jari mendapat pola yang sama maka proses identifikasi sudah berhasil. Tidak semua minutiae harus digunakan dan pola yang ditemukan tidak harus sama, maka kita dapat menyimpulkan bahwa posisi jari kita pada saat identifikasi pada mesin sidik jari juga tidak harus persis sama dengan pada saat kita menyimpan data sidik jari kita pertama kali pada mesin tersebut. Pemindai sidik jari optikal dan kapasitif dianggap menghasilkan tingkat keamanan yang tinggi, karena tidak bisa dipalsukan dengan foto copy sidik jari, sidik jari tiruan, atau bahkan dengan cetak lilin yang mendetil dengan guratan-guratan kontur sidik jari sekalipun (Joyner R. Oroh, 2014)
14
dan kemudahan. Proses identifikasi personal memiliki dua tahapan, yaitu proses verifikasdi dan proses pengenalan. Proses verifikasi dilakukan dengan memasukkan tokes, seperti kartu paspor, SIM, kartu kredit, ATM, dan sebagainya. Sedangkan pada proses pengenalan, memberikan pengenalan dengan menggunakan password, PIN, dan sebagainya. Sebagai contoh kartu ATM, proses identifikasi saat memasukkan kartu ke dalam mesin ATM. Sedangkan proses pengenalan yaitu pada saat memasukkan PIN ATM. Proses ini memiliki kelemahan saat proses verifikasi yaitu hilang, lupa, dan salah menempatkan. Sedangkan pada tahap pengenalan terjadi kelupaan PIN dan atau PIN tersebut pernah diubah, dapat ditebak orang lain. Hal ini merujuk pada data pencurian ATM sebesar 25%. Pada sistem biometrik, tahapan prosesnya mengidentifikasi individu-individu berdasarkan keunikan pribadi. Seperti sensor sidik jari yang berbeda tiap manusia. Pengidentifikasi biometrik dianggap lebih handal dibandingkan identifikasi personal. Mekanisme awal yaitu fase penyimpanan (enrollment). Pada fase ini masukan akan dipindai oleh sensor biomterik yang merupaka repreentasi karakteristik digital. Kemudian fase pencocokan. Selanjutnya disimpan dalam database yang diubah menjadi representasi digital. Pada sensor sidik jari yang digunakan, database penyimpanan terdapat pada sensor sidik jari tersebut. Pada fase pengenalan, karakteristik indivdu dibaca oleh sensor. Selanjutnya dikonversi ke format digital. Selanjutnya dicocokkan dengan identifikasi individu. Kelebihan sistem biometrik khususnya sensor sidik jari dibandingkan dengan sistem identifikasi personal yaitu:
1. Bersifat permanen, tidak dapat diubah.
15
3. Tidak bisa disalahgunakan oleh orang lain. 4. Praktis dan mudah.
Kekurangan yang dimiliki sensor sidik jari antara lain:
1. Tidak bisa memindai saat kondisi jari basah dan berdebu.
2. Terjadi kesalahan pencocokan dan ketidakcocokan. (Eko Adi Sarwoko, 2006)
2.2. Arduino Uno R3
16
Gambar 2.11 Arduino Uno R3.
Mikrokontroler : ATmega328P
Tegangan operasi : 5V
Tegangan masukan : 7-12 V Batas tegangan masukan : 6-20 V
Digital I/O pin : 14 (6 bisa digunakan sebagai keluaran PWM) Pin masukan analog : 6
Arus DC per pin I/O : 40 mA Arus DC untuk pin 3,3V : 50 mA
32 KB (ATmega 328) 0,5 KB digunakan untuk flash memory
SRAM : 2 KB (ATmega328)
EEPROM : 1 KB (ATmega328)
Clock speed : 16 MHz
17
18
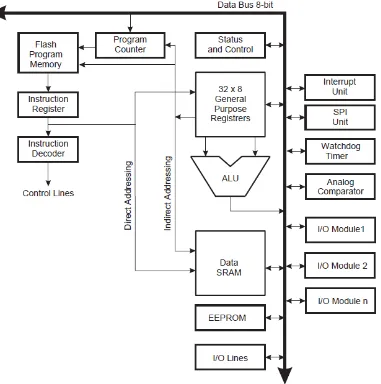
2.3. ATmega 328P
Mikrokontroler adalah sebuah sistem komputer fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti prosesor, memori, dan perlengkapan input output. Dengan kata lain adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus. Cara kerjanya yaitu membaca dan menulis data. Mikrokontroler merupakan computer di dalam chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiah disebut pengendali kecil di mana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat direduksi dan akhirnya terpusat serta dikendalikan oleh mikrokontroler ini.
19
Mikrokontroler yang digunakan pada penelitian ini adalah ATmega 328P jenis AVR. ATmega 328P meruapakan mikrokontroler keluaran dari atmel yang mempunyai arsitektur RISC yang di mana setiap proses eksekusi data lebih cepat dari arsitektur CISC. Mikrokontroller ATmega 328P memiliki kemudahan program dengan menggunakan program bahasa C dan download program antara PC dengan mikrokontroller sangat cepat. Mikrokontroller ATmega 328P memiliki 23 pin yang sudah terintegrasi dengan Board Arduino Uno R3. Mikrokontroler ini memiliki beberapa fitur antara lain:
1. 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
2. 32 x 8-bit register serba guna.
3. Kecepatan mencapai 16 MIPS dengan clock 16 Mhz.
4. 32 KB flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memory.
5. Memiliki EEPROM sebesar 1 KB. 6. Memilik SRAM sebesar 2 KB.
20
ALU (Arithmatic Logic unit) yang dapat dilakukan dalam satu siklus. Enam dari register serbaguna ini dapat digunakan sebagai 3 buah register pointer 16-bit pada mode pengalamatan tidak langsung untuk mengambil data pada ruang memori data.
21
22
Gambar 2.13 Konfigurasi ATmega 328P.
2.4Sensor Jarak PING
Sensor jarak ping adalah sensor 40 kHz produksi parallax yang banyak digunakan untuk aplikasi kontes robot cerdas. Kelebihan sensor ini adalah hanya membutuhkan 1 sinyal (SIG) selain jalur 5v dan ground.
23
Sensor jarak PING mendeteksi jarak objek dengan cara memancarkan gelombang ultrasonik selama 200µs kemudian mendeteksi pantulannya. Sensor jarak PING memancarkan gelombang ultrasonic sesuai dengan kontrol dari mikrokontroler pengendali. Berikut spesifikasi sensor jarak ultrasonik ping:
a. Jarak pengukuran antara 3cm – 3m.
b. Input trigger-positive TTL pulse, 2µs min, 5µs tipikal. c. Echo hold off 750µs dari fall of trigger pulse.
d. Delay before next measurement 200µs.
e. Burst indicator LED menampilak aktifitas sensor.
Sensor jarak PING mendeteksi jarak obyek dengan cara memancarkan gelombang ultrasonic selama 200µs kemudian mendeteksi pantuannya. Sensor jarak PING memancarkan gelombang ultrasonik sesuai dengan kontrol dari mikrokontroler pengendali (pulsa trigger dengan timeout minimanl 2µs). gelombang utrasonik ini melalui udara dengan kecepatan 344 meter per detik, mengenai obyek dan memantul kembali ke sensor. Ping mengeluarkan pulsa output high pada pin SIG setelah memancarkan gelombang ultrasonic dan setelah gelombang pantulan terdeteksi Ping akan membuat output low pada pin SIG. Lebar pulsa High akan sesuai dengan lama waktu tempuh gelombang ultrasonic untuk 2 kali jarak ukur dengan obyek. (Pahala Alpha Rinaldo Simbolon, 2011)
2.5 Motor DC
24
pengoperasiannya, motor arus searah sangat identik dengan generator arus searah. Kenyataannya mesin yang bekerja baik sebagai generator arus searah akan bekerja baik pula sebagai motor arus searah. Oleh sebab itu sebuah mesin arus searah dapat digunakan baik sebagai motor arus searah maupun generator arus searah.
Berdasarkan fisiknya motor arus searah secara umum terdiri atas bagian yang diam dan bagian yang berputar. Pada bagian yang diam (stator) merupakan tempat diletakkannya kumparan medan yang berfungsi untuk menghasilkan fluksi magnet sedangkan pada bagian yang berputar (rotor) ditempati oleh rangkaian jangkar seperti kumparan jangkar, komutator dan sikat. Motor arus searah bekerja berdasarkan prinsip interaksi antara dua fluksi magnetik. Dimana kumparan medan akan menghasilkan fluksi magnet yang arahnya dari kutub utara menuju kutub selatan dan kumparan jangkar akan menghasilkan fluksi magnet yang melingkar. Interaksi antara kedua fluksi magnet ini menimbulkan suatu gaya.
25
(a) (b)
(c)
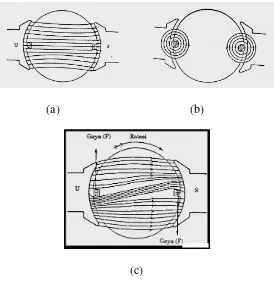
Gambar 2.15 Pengaruh Penempatan Koonduktor.
Setiap konduktor yang mengalirkan arus mempunyai medan magnet disekelilingnya. Kuat medan magnet yang timbul tergantung pada besarnya arus yang mengalir dalam konduktor.
Pada Gambar 2.15(a) menunjukkan sebuah medan magnet seragam yang dihasilkan oleh kutub-kutub magnet utara dan selatan yang arahnya dari kutub utara menuju kutub selatan.. Sedangkan Gambar 2.15(b) menggambarkan sebuah konduktor yang dialiri arus searah dan menghasilkan medan magnet (garis-garis gaya fluksi) disekelilingnya.
26
seragam seperti yang ditunjukkan pada Gambar 2.15(c). Sehingga kerapatan fluksi akan bertambah besar di atas sebelah kanan konduktor (dekat kutub selatan) dan di bawah sebelah kiri konduktor (dekat kutub utara) sedangkan kerapatan fluksi menjadi berkurang di atas sebelah kiri konduktor dan di bawah sebelah kanan konduktor. Kerapatan fluksi yang tidak seragam ini menyebabkan konduktor di sebelah kiri akan mengalami gaya ke atas, sedangkan konduktor di sebelah kanan akan mengalami gaya ke bawah. Kedua gaya tersebut akan menghasilkan torsi yang akan memutar jangkar dengan arah putaran searah dengan putaran jarum jam.
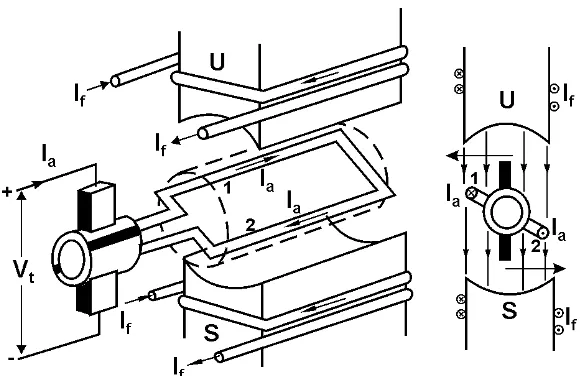
Gambar 2.16 Prinsip Kerja Motor DC.
27
Kumparan medan yang dialiri arus ini akan menimbulkan fluksi utama yang dinamakan fluksi stator. Fluksi ini merupakan medan magnet yang arahnya dari kutub utara menuju kutub selatan (hal ini dapat dilihat dengan adanya garis–garis fluksi). Apabila pada kumparan jangkar mengalir arus yakni arus jangkar, maka dari hukum Lorenzt kita ketahui bahwa apabila sebuah konduktor yang dialiri arus ditempatkan pada sebuah medan magnet maka pada konduktor tersebut akan timbul gaya, maka demikian pula halnya pada kumparan jangkar. Besarnya gaya ini bergantung dari besarnya arus yang mengalir pada kumparan jangkar (Ia), kerapatan fluksi (B) dari kedua kutub dan panjang konduktor jangkar (l). Semakin besar fluksi yang terimbas pada kumparan jangkar maka arus yang mengalir pada kumparan jangkar juga besar, dengan demikian gaya yang terjadi pada konduktor juga semakin besar.
Bila kumparan jangkar dari motor berputar dalam medan magnet dan memotong fluksi utama maka sesuai dengan hukum induksi elektromagnetis maka pada kumparan jangkar akan timbul gaya gerak listrik (ggl) induksi yang arahnya sesuai dengan kaidah tangan kanan, dimana arahnya berlawanan dengan tegangan yang diberikan kepada jangkar atau tegangan terminal (Zuhal, 1998)
28
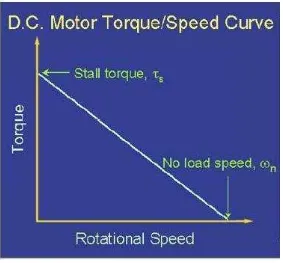
Gambar 2.17 Kurva torsi dan kecepatan
Dari gambar 4.7 di atas terlihat hubungan antara torsi dan kecepatan suatu motor dc tertentu. Dari grafik terlihat bahwa torsi berbanding terbalik dengan kecepatan putaran. Dengan kata lain terdatpat trade off antara besar torsi yang dihasilkan motor dengan kecepatan putaran motor. Dua karakteristik penting terlihat dari grafik yaitu:
1. Stall torque, menunjukkan titik pada grafik di mana torsi maksimum tetapi tidak ada putaran pada motor.
2. No load speed, menunjukkan titik pada grafik di mana terjadi kecepatan putar maksimum tetapi tidak ada beban pada motor.
29
………(2.1)
……….(2.2)
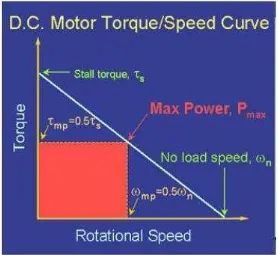
Dengan memasukan persamaan torsi dan kecepatan ke dalam persamaan daya diperoleh (Ranti Permata Sari, 2010):
………(2.3)
………..(2.4)
Dari persamaan daya terlihat bahwa daya merupakan perkalian antara torsi dan kecepatan sudut. Dimana di dalam grafik ditunjukkan oleh luas daerah persegi di bawah kurva torsi dan kecepatan. (Ranti Permata Sari, 2010)
III. METODOLOGI PENELITIAN
3.1 Waktu Dan Tempat Penelitian
Penelitian ini dilakansanakan mulai bulan Januari 2014 – Juni 2014, bertempat di Laboratorium Konversi Energi Elektrik, Laboratorium Terpadu Teknik Elektro, Universitas Lampung.
3.2 Alat Dan bahan
Peralatan yang digunakan dalam penelitian ini adalah 4 buah LED dengan warna putih, 5 buah relay 12 volt, 8 buah resistor 10 kOhm, 4 buah resistor 1 kOhm, IC ULN 2003, 7 buah penghubung, sensor sidik jari, 2 Mikrokontroler ATmega 328P, 2 board Arduino Uno R3, Motor DC, Power Supply, pcb, solder, tachometer, multimeter digital, 2 limit switch, dan sensor jarak PING.
3.3 Blok Diagram
31
Gambar 3.1 Diagram Blok Rancangan.
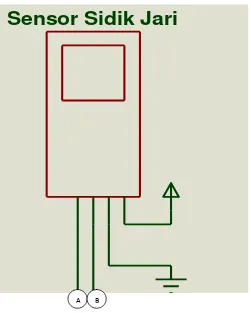
Gambar 3.2 Rangkaian Sensor Sidik Jari.
Sensor Sidik Jari
32
Gambar 3.3 Rangkaian Kontrol 1.
33
Gambar 3.5 Rangkaian Driver Relay.
34
Gambar 3.7 Rangkaian Limit Switch 1 dan 2.
36
Gambar 3.9 merupakan rangkaian keseluruhan sistem. Data dari sensor sidik jari masuk ke port D0 dan D1 pada mikrokontroler 1. Kemudian port D4 sampai D7 digunakan sebagai luaran ke driver relay yang akan mengendalikan relay 1 sampai relay 4 untuk mengatur arah putaran motor dc dengan metode pembalikan polaritas catu daya atau power supply motor. Kombinasi relay 1 dan relay 3 digunakan untuk mengatur putaran motor kearah kiri atau berlawanan jarum jam. Kombinasi relay 2 dan relay 4 untuk mengatur putaran motor kearah kanan atau searah jarum jam. Limit switch 1 masuk ke port D6 mikrokontroler 2, limit switch 2 masuk ke port B0, dan sensor jarak ping masuk ke port D4. Kemudian port D2 digunakan sebagai luaran ke driver relay yang akan mengendalikan relay 5 untuk menghentikan putaran motor dengan cara memutus catu daya atau power supply motor saat putaran motor kearah kanan atau kiri sudah mencapai jarak maksimal hingga menyentuh limit switch 1 atau limit switch 2, dan saat sensor jarak ping mendeteksi ada benda di depannya yang berjarak kurang dari 50 cm dari sensor.
Prinsip kerja alat prototype ini melakukan penyimpanan data sidik jari. Dengan cara menghubungkan control berupa arduino uno r3 atmega 328P dengan sensor sidik jari dengan tegangan masuk +5 vdc, kemudian memasukkan urutan program penyimpanan. Langkah selanjutnya yaitu, menempelkan jari yang sidik jarinya ingin disimpan dan dipindai. Penyimpanan data sidik jari ini berupa gambar kemudian diubah menjadi data digital.
1 0
37
Dari gambar 3.10 dapat terbaca sinyal digital yang terjadi saat proses penyimpanan. Pada saat sensor menyala kondisinya 0 kemudian saat membaca sidik jari kondisinya 1 dengan waktu pembacaan. Kemudian kembali ke kondisi 0 saat pembacaan, kemudian kembali ke kondisi 1 saat meminta konfirmasi sidik jari yang sama untuk melakukan penyimpanan lalu kembali ke kondisi 0 saat kondisi siaga untuk melakukan penyimpanan data berikutnya. Data sidik jari yang
tersimpan diberikan penamaan atau id berupa bilangan asli (0,1,2,3,…., 162). Data
gambar disimpan pada memori yang terdapat di sensor sidik jari. Selanjutnya mengecek data penyimpanan dengan memasukan urutan program pembacaan sidik jari. Berikut gambar sinyal digitalnya.
1 0
Gambar 3.11 Sinyal digital saat pembacaan sidik jari tersimpan. 1
0
38
1 0
Gambar 3.13 Sinyal digital saat proses prototype dengan sidik jari tersimpan terbaca.
1 0
Gambar 3.14 Sinyal digital saat proses prototype dengan sidik jari tidak tersimpan.
39
Tabel 3.1 Desain rencana kontrol
NO AKTIFITAS OUTPUT KONDISI
1 Jika sensor sidik jari mendeteksi koding yang tidak sesuai
Sensor sidik jari
(A) bernilai 0 Pagar Diam
2 Jika sensor sidik jari mendeteksi koding yang sesuai
3 Jika sensor jarak ping tidak mendeteksi benda di tengah lintasan
4 Jika sensor jarak ping mendeteksi benda di tengah lintasan
5 Jika limit switch 1 dan 2 tidak tertekan oleh pagar
40
Gambar 3.15 Kondisi pagar diam
Gambar 3.16 Kondisi pagar membuka dan diam karena delay waktu.
Gambar 3.17 Kondisi pagar dari membuka bergerak ke menutup tanpa benda menghalangi.
41
3.4 Metode/Prosedur Kerja
Dalam penelitian ini, langkah-langkah kerja yang dilakukan adalah sebagai berikut:
3.4.1 Studi Literatur
Studi literatur dilakukan untuk mempelajari berbagai sumber referansi atau teori yang berkaitan dengan pengaruh beban pada putaran motor:
a. Besarnya daya terhadap beban pagar
b. Pengaruh kecepatan pada tegangan, waktu, dan arus 3.4.2 Rangkaian Driver Relay
Pada alat yang dibuat memiliki rangkaian yang dapat membolak-balikkan arah putaran motor atau polaritas. Pada gambar 3.5 terdapat 4 buah relay yang digunakan sebagai switching dengan membalikkan polaritas. Lampu indicator atau LED akan membantu mengetahui kondisi relay yang bekerja. Pada rangkaian ini, selain relay terdapat juga beberapa komponen lainnya seperti resistor. Resistor yang digunakan sebelum ic uln 2003 dihubungkan ke arduino. Fungsi dari resistor sebagai penyetabil tegangan dan arus yang masuk ke rangkaian. Masukan yang berasal dari kaki arduino akan terhubung dengan ic uln 2003, dengan melihat datasheet. Arus dan tegangan dapat dihitung dengan,
Tegangan kerja = 1,4 Volt
Arus kerja = 0.5 mA – 0.35 mA Sehingga,
42
Dimana: Rd = Resistor (R1, R2, R3, R4) Vs = Tegangan Sumber
Vd = Tegangan Kerja ic I = Arus Kerja ic
Sehingga dapat nilai R sebagai berikut: Rd = (Vs – Vd) / I
= (5 - 1.4) / 0.35 mA = 10285.71 Ω
= 10.285 kΩ = 10 kΩ
Maka, nilai resistor yang digunakan sebelum ic uln 2003 yaitu 10kΩ.
Sedangkan pada resistor (R5, R6, R7, R8) yang berada sebelum led berfungsi sebagai penghambat arus listrik, sehingga arus yang melewati led diperkecil. Di bawah ini perhitungan untuk resistor sebelum led,
Rk = (Vs –Vd) / I ……….(3.2)
Dimana: Rk = Resistor ( R5, R6, R7, R8) Vs = Tegangan Sumber
Vd = Tegangan Kerja led I = Arus Kerja led
Pada rangkaian, led yang digunakan berwarna putih, sehingga tegangan kerjanya antara 3.0 volt - 3.6 volt. Sedangkan arus kerja led antara 10 mA
– 20 mA. Di bawah ini perhitungan penentuan nilai resistor, Rk = (Vs – Vd) / I
43
= 900Ω
Nilai resistor yang didapat yaitu 900Ω, dimaksimalkan dengan
menggunakan resistor 1 kΩ. Jadi, resistor yang digunakan sebelum led 1
kΩ.
3.4.3 Rancangan Sensor Sidik Jari
Pada penelitian ini menggunakan sensor sidik jari atau fingerprint yang berfungsi sebagai indikator putaran motor dc. Sensor sidik jari ini sebagai perintah untuk menjalankan motor dc.
44
Berat = 20 gram
3.4.4 Rancangan Pagar Otomatis
Pagar adalah struktur tegak yang dirancang untuk membatasi atau mencegah gerakan melintasi batas yang dibuatnya. Pagar memiliki beberapa kegunaan, misal pada rangkaian ini menggunakan pagar pengaman yang berguna untuk menghindari pelanggar batas atau pencuri, mencegah anak-anak dan hewan peliharaan untuk lari. Pada penelitian ini menggunakan pagar berbahan besi dengan panjang 1m, lebar, 50cm, dan menggunakan 4 buah roda. Pagar ini terhubung dengan motor dc dengan gir dan rantai sebagai alat penggerak pagar. Dapat dilihat pada gambar 3.3
Gambar 3.19 Pagar Yang Terhubung Dengan Motor DC. 3.4.5 Pengujian Alat
Pengujian rangkaian subsistem ini dilakukan untuk menguji kinerja masing-masing subsistem.
45
Pengujian pada sensor sidik jari ini dilakukan dengan cara memasukkan 5 buah sidik jari. Kemudian sensor membaca dan menyimpannya ke dalam memori yang terdapat pada sensor. 5 buah sidik jari tersebut yaitu ibu jari, jari telunjuk, jari tengah, jari manis, dan jari kelingking. Semuanya merupakan jari yang ada pada tangan kanan. Dengan penamaan id 0, 1, 2, 3, dan 4 secara berurutan dari ibu jari sampai jari kelingking. 3.4.5.2 Pengujian Driver Relay
Pengujian rangkaian driver motor ini sebagai switching relay dengan cara memberikan masukan sebagai sumber utama dan memberikan trigger pada pin-pin yang dihubungkan ke pin arduino. Pengujian ini dilakukan untuk memastikan pengendali motor dalam hal ini arduino uno r3 dengan Atmega328P bekerja dengan baik. Proses pengujian dilakukan degnan memasukkan program ke mikrokontroler yang terhubung ke motor dc. Dikatakan programa dapat berjalan dengan baik apabila motor dc dapat membalik arah putaran dan berhenti sesuai delay waktu yang diberikan.
3.4.5.3 Pengujian Sensor Jarak PING
46
pagar pada jarak terjauh yang terdeteksi yaitu 50 cm sampai 5 cm, maka sensor jarak ini akan memerintahkan kontrol untuk memutus tegangan driver motor dan tegangan masukan ke motor dc
3.4.5.4 Pengujian Motor DC
Pengujian ini dilakukan dengan cara mengukur nilai putaran dengan masukan tegangan yang berurutan, dari tegangan terendah sampai tegangan tertinggi, sesuai respon putaran motor. Penentuan nilai tersebut akan dibandingkan dengan waktu dan beban pada motor.
3.5Pengujian Keseluruhan Sistem
Pengujian ini dilakukan untuk mengetahui semua subsistem apakah sudah berhasil atau tidak. Dengan menjalankan semua system yang telah dirangkai dan diprogram. Dalam pengujian model ini dilakukan dengan mengganti sumber tegangan dari terendah sampai tertinggi.
3.6 Analisis dan Simpulan, Serta Pembuatan Laporan
47
MULAI
SENSOR SIDIK JARI
PENYIMPANAN DATA
SESUAI/TIDAK SESUAI
SELESAI YA
TIDAK
48
MULAI
SENSOR SIDIK JARI
MEMINDAI SIDIK JARI
SESUAI/TIDAK SESUAI
SELESAI
TIDAK
Driver relay bekerja
MOTOR DC BERGERAK MAJU DAN MUNDUR
YA
49
MULAI
SENSOR Jarak Ping
MENDETEKSI BENDA
SESUAI/TIDAK SESUAI
SELESAI
TIDAK
MEMUTUS TEGANGAN
MOTOR DC BERHENTI
YA
V. SIMPULAN DAN SARAN
5.1SIMPULAN
Dari hasil penelitian prototype penggerak pintu pagar otomatis berbasis arduino uno R3 Atmega 328P dengan sensor sidik jari, dapat ditarik kesimpulan sebagai berikut:
1. Prototype penggerak pintu pagar otomatis dengan sensor sidik jari sebagai koding aktivasi telah berhasil dibuat. Dengan menggunakan sensor jarak untuk menghentikan putaran motor saat ada benda di tengah lintasan pagar dan saklar yang memutus sumber tegangan masuk ke motor dc saat pagar telah berada di ujung lintasan pagar pada kondisi membuka dan menutup.
2. Dengan beban pagar sebesar 10 kg, panjang lintasan 2 m, diameter gir 5 cm, panjang rantai 0,95 m, jumlah mata gigi 14, daya motor sebesar 300 watt, dan tegangan masukan dari 15,2 Vdc – 35 Vdc. Kondisi optimal saat kondisi motor dc menggerakan pagar secara forward dan backward yaitu antara rentang tegangan 18,3 Vdc – 21,6 Vdc.
72
69,02 kg. Pada penelitian, prototype ini hanya mampu menggerakan benda sebesar 50 kg karena konstruksi benda yang kurang sempurna dan pergesekan antara gir dan rantai.
5.2SARAN
DAFTAR PUSTAKA
Anonim. 2013. Arduino Uno. Arduino. Milan.
http://arduino.cc/en/Main/arduinoBoardUno (dibuka pada: 1 Desember 2013)
Anonim. 2014.ATmega48A/PA/88A/PA/168A/PA/328/PDatasheet Sumary. Atmel. California.
www.atmel.com.Datasheet AVR ATMega 328P (dibuka pada: 1 Januari 2014)
Antoni, Roza. 2013. Perancangan Sistem Pengaturan Kecepatan Motor DC Menggunakan Zig Bee Pro Berbasis Arduino Uno ATmega 328P. (Skripsi). Universitas Maritim Raja Ali Haji. Tanjung Pinang.
Lathif, Naslim. 2001. Aplikasi Sidik Jari Untuk Sistem Presensi Menggunakan Magic Secure 2500. (Makalah Seminar Tugas Akhir). Universitas Diponegoro. Semarang.
Maulida, Rina. 2010. Pemanfaatn Absensi Sidik Jari Digital (Fingertec) Pada Rumah Sakit Umum Daerah Meuraxa. (Laporan Kuliah Kerja Praktik). Universitas Syiah Kuala. Banda Aceh.
Mujiman. 2008. Pintu Otomatis Berpengunci Waktu Berbasis Mikrokontroler AT89C51. (Jurnal Teknologi, Vol. 1, No. 1, 2008: 58-67). Institut Sain dan Teknologi AKPRIND. Yogyakarta
74 Sari, Ranti Permata. 2010. Penalaan Parameter Kontrol PID Dengan Metode
Heuristic, Aplikasi: Sistem Pengendalian Kecepatan Motor DC. (Tugas Akhir). Institut Teknologi Sepuluh Nopember. Surabaya.
Sarwoko, Eko Adi. 2006. Mekanisme Sistem Identifikasi Biometrik. (Prosiding Seminar Nasional SPMIPA). Universitas Diponegoro. Semarang.
Simbolon, Pahala Alpha Rinaldo. 2011. Aplikasi Sensor Ultrasonik Sebagai Pengendali Level Ketinggian Air Secara Otomatis Dengan Menggunakan Mikrokontroler ATmega 8535. (Tugas Akhir). Universitas Sumatera Utara. Medan
Sularso. 1978. Dasar Perencanaan dan Pemilihan Elemen Mesin. Pradnya Paramita. Jakarta.