DAFTAR PUSTAKA
Affan, E. 2016. Implementasi Robot Pembersi Lantai Dengan Pengendali Smartphone Menggunakan Logika Fuzzy. Skripsi. Universitas Sumatra Utara.
Andika, J. 2014. Pengontrolan robot berbasisarduino menggunakan android. Paper Teknik Elektro Universitas Mercu Buana: 1-12.
Andrisyam, M. 2010. Teknologi Lubang Resapan Biopori (LRB) Peresapan Air Tanah Pengolahan Sampah Organik (Eksperimen). Skripsi. Universitas Sumatra Utara. BNPB. 2017. Jumlah kejadian bencana, korban, dan dampaknya sampai bulan Januari
2017. (online) http://dibi.bnpb.go.id/ (1Maret 2017).
BPS. 2017. Persentase Rumah Tangga Menurut Provinsi dan Keberadaan Area Resapan Air 2014. (online) https://www.bps.go.id/ (1Maret 2017).
Erithe, F.N., Nurussaadah. & Zainuri,A. 2015. Implementasi Bluetooth HC-5 Untuk Mengurangi Tingkat Kecelakaan Pada Pengendara Sepeda Motor. Jurnal Teknik Elektro. 1-2.
Ferbangkara, S. 2015. Pembuatan biopori di fakultas teknik untuk meningkatkan penyerapan air. (online) Hilwatullisan. 2011. Lubang resapan biopori (LRB) pengertian dan cara membuatnya
di lingkungan kita. Jurnal Teknik kimia Politeknik Negeri Sriwijaya. 1-11. Iteadstudio. 2010. Bluetooth HC-05. Datasheetelectronic. 1-4.
Juhara, Z.P. 2016. Panduan Lengkap Pemrograman Android: Android dan
arsitekturnya: Menyiapkan lingkungan pengembangan aplikasi android. Ratih.
1-30. Penerbit Andi: Yokyakarta.
Kadir, A. 2015. From Zero To A Pro Arduino. Venan. 1-463. Penerbit Andi: Yokyakarta.
Poskota.co. 2014. Sejuta biopori dibuat dikota malang. (online)
(5
September 2016).
Samarinda Pos. 2016. Cegah DBD Dengan Biopori. Prokal.co, 4 Desember 2016 (diakses 1Maret 2017).
Sanitya, R.S. & Burhanudin, H. 2015. Penetuan lokasi dan jumlah lubang biopori di kawasan das cikapundung bagian tengah. Jurnal Fakultas Teknik Universitas Islam Bandung. 1-11.
Simanjuntak, M.G. 2013. Perancangan Prototipe Smart Building Berbasis Arduino UNO. Skripsi. Universitas Sumatra Utara. 6-14.
Suparni. 2016. 200 Biopori Dibuat di Pulau Kelapa. Beritajakarta.com, 25 November 2016 (diakses 1Maret 2017).
Widianto, A. & Nuryanto. 2015. Rancang bangun mobil remote control android dengan arduino. Paper Teknik Informatika Universitas Muhammadiyah Magelang. 1-12.
Winarno. & Arifianto, D. 2011. Bikin Robot Itu Gampang:Jenis dan system robot:
Peralatan membuat robot: Komponen untuk membuat robot. Arifun Natik. 1-69.
DAFTAR PUSTAKA
Affan, E. 2016. Implementasi Robot Pembersi Lantai Dengan Pengendali Smartphone Menggunakan Logika Fuzzy. Skripsi. Universitas Sumatra Utara.
Andika, J. 2014. Pengontrolan robot berbasisarduino menggunakan android. Paper Teknik Elektro Universitas Mercu Buana: 1-12.
Andrisyam, M. 2010. Teknologi Lubang Resapan Biopori (LRB) Peresapan Air Tanah Pengolahan Sampah Organik (Eksperimen). Skripsi. Universitas Sumatra Utara. BNPB. 2017. Jumlah kejadian bencana, korban, dan dampaknya sampai bulan Januari
2017. (online) http://dibi.bnpb.go.id/ (1Maret 2017).
BPS. 2017. Persentase Rumah Tangga Menurut Provinsi dan Keberadaan Area Resapan Air 2014. (online) https://www.bps.go.id/ (1Maret 2017).
Erithe, F.N., Nurussaadah. & Zainuri,A. 2015. Implementasi Bluetooth HC-5 Untuk Mengurangi Tingkat Kecelakaan Pada Pengendara Sepeda Motor. Jurnal Teknik Elektro. 1-2.
Ferbangkara, S. 2015. Pembuatan biopori di fakultas teknik untuk meningkatkan penyerapan air. (online) Hilwatullisan. 2011. Lubang resapan biopori (LRB) pengertian dan cara membuatnya
di lingkungan kita. Jurnal Teknik kimia Politeknik Negeri Sriwijaya. 1-11. Iteadstudio. 2010. Bluetooth HC-05. Datasheetelectronic. 1-4.
Juhara, Z.P. 2016. Panduan Lengkap Pemrograman Android: Android dan
arsitekturnya: Menyiapkan lingkungan pengembangan aplikasi android. Ratih.
1-30. Penerbit Andi: Yokyakarta.
Kadir, A. 2015. From Zero To A Pro Arduino. Venan. 1-463. Penerbit Andi: Yokyakarta.
Poskota.co. 2014. Sejuta biopori dibuat dikota malang. (online)
(5
September 2016).
Samarinda Pos. 2016. Cegah DBD Dengan Biopori. Prokal.co, 4 Desember 2016 (diakses 1Maret 2017).
Sanitya, R.S. & Burhanudin, H. 2015. Penetuan lokasi dan jumlah lubang biopori di kawasan das cikapundung bagian tengah. Jurnal Fakultas Teknik Universitas Islam Bandung. 1-11.
Simanjuntak, M.G. 2013. Perancangan Prototipe Smart Building Berbasis Arduino UNO. Skripsi. Universitas Sumatra Utara. 6-14.
Suparni. 2016. 200 Biopori Dibuat di Pulau Kelapa. Beritajakarta.com, 25 November 2016 (diakses 1Maret 2017).
Widianto, A. & Nuryanto. 2015. Rancang bangun mobil remote control android dengan arduino. Paper Teknik Informatika Universitas Muhammadiyah Magelang. 1-12.
Winarno. & Arifianto, D. 2011. Bikin Robot Itu Gampang:Jenis dan system robot:
Peralatan membuat robot: Komponen untuk membuat robot. Arifun Natik. 1-69.
BAB 3
ANALISIS DAN PERANCANGAN SISTEM
3.1. Analisis Sistem
Analisis sistem pada penelitian didefinisikan sebagai penguraian dari suatu sistem yang utuh kedalam beberapa bagian komponen sistem. Analisis sistem bertujuan untuk mengidentifikasi dan mengevaluasi permasalahan-permasalahan yang terjadi serta kebutuhan-kebutuhan yang diharapkan dari sistem. Permasalahan dan kebutuhan yang teridentifikasi dapat digunakan sebagai bahan pertimbangan dalam pengambilan tindakan evaluasi ataupun pengambilan tindakan perbaikan pada sisitem tersebut. 3.1.1. Analisis Masalah
Untuk mengidentifikasi masalah pada penelitian ini penulis menggunakan diagram Ishikawa. Diagram Ishikawa yang disebut juga diagram tulang ikan (fishbone diagram) adalahalat grafis yang digunakan untuk mengidentifikasi, mengeksplorasi dan menggambarkan masalah, serta sebab dan akibat dari masalah tersebut. Sesuai dengan fungsinya, diagram Ishikawasering juga disebut dengan diagram sebab-akibat. Masalah utama dalam proses pembuatan lubang resapan biopori adalah proses pembuatannya yang membutuhkan tenaga besar dan lebih sering dilakukan secara manual sehingga banyak orang yang merasa malas untuk membuatnya. Padahal faktanya lubang resapan biopori merupakan salah satu solusi penanganan banjir dan memiliki banyak manfaat lainnya. Dengan kemajuan teknologi saat ini terutama dalam dunia robotika, semua orang berlomba untuk menciptakan sebuah penemuan baru yang dapat memecahkan permasalahan yang dialami manusia.
Robot pembuat lubang resapan biopori dapat membantu meringankan pekerjaan manusia dalam proses pembuatan lubang resapan biopori dalam jumlah banyak. Sebagai contoh dalam kasus ini, penulis melihat permasalahan yang dialami manusia dalam proses pembuatan lubang resapan biopori terutama pada area yang luas seperti area parker, taman dan lapangan olahraga. Biasa proses pembuatan biopori dilakukan secara manual menggunakan peralatan berkebun dan dengan tenaga manusia. Namun bagaimana jika proses pembuatan lubang biopori dilakukan di area yang luas serta membutuhkan jumlah lubang rasapan yang cukup banyak. Ditambah lagi dengan syarat lubang ideal yang dibutukhan untuk memaksimalkan kinerja dari lubang biopori tersebut. Syarat terebut seperti memiliki diameter 10 cm dengan
kedalam 1 meter dan jarak 1 meter antara masing-masing lubang. Oleh karena itu dibutuhkan sebuah robot yang dapat membantu manusia dalam proses pembuatan lubang resapan biopori agar lebih efektif dan efesien.
Analisis masalah tersebut digambarkan dengan menggunakan Diagram Ishikawa (fishbone Diagram) berikut ini. Dengan keterangan bagian kepala atau segiempat paling besar yang berada di sebelah kanan merupakan solusi dan segiempat-segiempat kecil merupakan bagian tulang-tulangnya yang menggambarkan permasalahan.
Gambar 3.1 Ishikawa Diagram Pada Robot Pembuat LBR.
3.1.2. Analisis Kebutuhan
Pada Penelitia ini analisis kebutuhan dibagi menjadi dua jenis, yaitu analisis kebutuhan fungsional dan analisis kebutuhan nonfungsional. Analisis kebutuhan merupakan tahapan yang sangat dibutuhkan dalam mendukung kinerja sistem, karena tahapan ini dapat menggambarkan apakah sistem yang dibuat telah sesuai dengan kebutuhan atau masih belum sesuai. Pada penelitian ini kebutuhan dari sebuah sistem akan mendukung dan mempengaruhi tercapai atau tidaknya suatu tujuan yang diharapkan dari sistem tersebut.
3.1.2.1. Analisis Fungsional
informasi-informasi apa saja yang harus ada dan dihasilkan oleh sistem tersebut. Berikut ini adalah kebutuhan fungsional dari sistem, yaitu:
a. Robot dapat menerima perintah yang diinputkan oleh pengguna. b. Robot dapat memproses perintah yang diterima dari pengguna
c. Robot dapat melakukan gerakan sesuai perintah yang dikirim melalui smartphone android.
3.1.2.2. Analisa Nonfungsional
Analisis kebutuhan nonfungsional merupakan jenis kebutuhan yang nantinya dapat dilakukan oleh sistem untuk mendukung kinerja sistem tersebut.
Berikut ini adalah kebutuhan nonfungsional dari sistem, yaitu:
a. Desain grafis remote control pada smartphone android dapat dipahami oleh user sehingga robot dapat dikendalikan dengan mudah.
b. Robot menggunakan saklar sehingga koneksi terhadap suplai tegangan dapat diatur dengan mudah.
c. Robot dapat memberi isyarat kepada pengguna melalui beberapa lampu indikator yang berfungsi sebagai tanda koneksi Bluetooth serta lampu indicator sebagai tanda terhubungnya modul-modul elektronik dengan sumber tegangan.
3.1.3. Permodelan Sistem
3.1.3.1. Permodelan Persyaratan Sistem dengan Use Case
Pada penelitian ini digunakan Unified Modelling Language (UML) yang merupakan bentuk perancangan dan dokumentasi perangkat lunak berbasis pemrograman berorientasi objek. UML digambarkan menggunakan beberapa diagram, yaitu Use case Diagram, Activity Diagram, dan Sequence Diagram. Use case Diagram adalah salah satu permodelan yang digunakan untuk memodelkan persyaratan sistem. Dengan adanya use case segalah interaksi terhadap sistem akan tergambarkan seperti, siapa saja yang berinteraksi dengan sistem dan apa saja yang dapat dilakukan dengan sistem.
Use case diagram menunjukkan interaksi antara pengguna dan entitas eksternal lainnya dengan sistem yang sedang dikembangkan. Dalam arti lain Use Case Diagram digunakan untuk menggambarkan interaksi antara user dengan robot. Pada robot pembuat lubang biopori ini user memberi perintah melalui smartphone android berupa gerakan seperti maju, mundur, belok kanan, belok kiri serta gerakan penggalian. Perintah tersebut akan dikirim ke robot melalui Bluetooth sehingga robot bergerak sesuai keinginan user.
Penjelasan dari Use Case Diagram pada Gambar 3.2 akan dijelaskan dalam Dokumentasi Naratif Use Case Sistem pada Tabel 3.1.
Tabel 3.1 Dokumentasi Naratif Use Case Sistem.
Nama Use Case
Robot pembuat lubang resapan biopori
Actors
Pengguna
Description
Proses ini mendeskripsikan proses pergerakan Robot
Pre-Condition
Sistem dihidupkan (power on)
Basic Flow
Kegiatan pengguna Respon sistem
Menginput perintah Menunggu keseluruhan proses inputan selesai Alternative Flow Menekan tombol reset/power Sistem reset Post Condition
Robot akan melakukan pergerakan sesuai inputan dari pengguna
3.1.3.2. Activity Diagram
Gambar 3.3 Activity Diagram Robot Pembuat LBR.
biopori dengan memasukkan input-an berupa perintah melalui smartphone android. Dengan cara tersebut user akan mengontrol kemana arah robot pembuat lubang resapan biopori itu akan bekerja. Selanjutnya sistem akan memproses inputan yang telah diterima. Setelah inputan selesai diproses maka robot akan bergerak maju, mundur, belok kanan, belok kiri ataupun melakukan penggalian sesuai input yang telah diterima. Robot ini akan bergerak maju, mundur, belok kanan, belok kiri ataupun melakukan penggalian sesuai logika pada fungsiIF dan ELSE. Dan ketika pekerjaan sudah selesai maka User dapat menonaktifkan Bluetooth pada smartphone lalu mematikan Robot tersebut.
3.1.3.3. Sequence Diagram
Sequence diagram merupakan suatu diagram yang menggambarkan interaksi antara actor
dan objek-objek yang terdapat dalam suatu sistem. Interaksi-interaksi tersebut akan
disusun pada sebuah urutan atau rangkaian waktu.
Pada sequence diagram robot pembuat lubang resapan biopori pada gambar 3.4 dapat dilihat user terlebih dahulu menghidupkan robot (power on). Selanjutnya sistem (robot) akan menerima inputan perintah dari pengguna (user). Tahap selanjutnya Sistem robot akan melakukan proses penentuan perintah mana yang telah dikirim penguna dan diterima oleh robot. Robot akan memproses perintah mana yang akan dilakukan, maju, mundur, belok kanan, belok kiri, atau melakukan penggalian berdasarkan logika pada fungsiIFdan ELSE. Setelah perintah teridentifikasi maka robot akan melakukan pergerakan sesuai dari perintah pengguna.
2.2. Perancangan Sistem
Perancangan sistem bertujuan untuk memenuhi komponen-komponen yang dibutuhkan dalam membangun sebuah sistem. Selain itu tahap perancangan sistem juga dapat memberi gambaran secara lebih detail untuk menghasilkan rancang bangun yang lengkap. Tahapan ini akan dibagi menjadi beberapa bagian utama, yaitu penentuan komponen yang digunakan, perancangan kontruksi dan perancangan perangkat lunak robot serta Flowchart diagram.
2.2.1. Komponen Yang Digunakan Robot
Komponen yang digunakan dalam proses pembangunan sistem dikelompok menjadi dua
yaitu komponen fisik dan komponen elektronik. Komponen fisik digunakan untuk
membentuk kerangka robot, bagian body utama sertamekanis robot. Sedangkan
komponen elektronik digunakan untuk membangun sirkuit utama (main circuit ) dan
bagian actuator. Rincian dari peralatan serta komponen yang digunakan dalam
perancangan sistem tertera pada Tabel 3.2, Tabel 3.3 dan Tabel 3.4.
Tabel 3.2 Peralatan Yang Dipergunakan Dalam Membuat Robot.
Nama Alat Fungsi
Gergaji Sebagai alat potong untuk papan PCB dan fisik robot
Tang potong Sebagai alat potong untuk kabel
Cuter Untuk memotong Akrilik
Glue Gun Sebagai alat untuk melakukan pengeleman
Penggaris Sebagai alat ukur
Solder dan Timah Sebagai alat untuk Soldering Obeng Untuk memasang dan membuka baut
Tang jepit Untuk penjepit
Multimeter Digital Alat ukur satuan listrik (tegangan, hambatan dan arus) Pemotong Akrilik Untuk Memotong Arilik
Penyedot Timah Untuk menyedot timah pada pcb
Pinset Untuk memasang komponen
Project board Sebagai tempat uji rangkaian
jumper Menghubungkan komonen pada project board
Tabel 3.3 Komponen Yang Dipergunakan Dalam Membuat Robot.
Nama Spesifikasi Keterangan
Akrilik Tebal 3 mm Sebagai badan robot dan tempat meletakkan Baut dan Mur Diameter 2 mm
Panjang 12 mm
Memasang rangkaian pada akrilik
Spacer Panjang 20 mm Tiang untuk akrilik Potongan
alumunium
Sebagai penyangga mesin penggali
Gear set sepeda motor
Rantai sepeda motor
Sebagai pembalut roda
Mata bor Diameter 10 mm Sebagai mesin penggali
Tabel 3.4 Komponen Elektronik Yang Dipergunakan Dalam Membuat Robot.
Nama Spesifikasi Keterangan
Sistem Minimum Microcontroller
Arduino Uno Processor Utama
Driver Motor L298 Driver untuk motor
Motor DC & Servo
12 Volt Akuator Roda
Komponen Pasif
Kapasitor, Resistor, Kristal, Potensiometer, dioda
Komponen Sirkuit
Pin Konektor Male Konektor
Pin Konektor Female Konektor
Switch 6 pin Sebagai On/Off Robot
Baterai baterai valve regulated lead-acid Output 12 volt/72 Ah
Sumber tegangan
Kabel Pelangi Isi 20, 2 Meter Transmisi konektor Module
Bluetooth
HC-06 Koneksi antar perangkat
Module Stepdown
2.2.2. Perancangan Robot Pembuat Lubang Biopori
Prototipe robot pembuat lubang resapan biopori yang akan dirancang merupakan robot yang beroperasi di luar ruangan dan berjalan pada medan tanah. Robot akan melakukan proses penggalian tanah yang memiliki tingkat kekerasan berbeda-beda. Selain itu robot pembuat lubang resapan biopori juga harus dapat dikendalikan dengan smartphone android untuk itu ada beberapa hal yang menjadi fokus dalam tahap perancangan robot yaitu kerangka robot, aktuator, sirkuit elektronik dan perangkat lunak.
2.2.3. Perancangan Kerangka Robot
Bentuk dari kerangka robot akan sangat mempengaruhi tampilan dari robot itu sendiri. Kerangka adalah konstruksi robot yang akan menentukan desain, bentuk dan ukuran dari komponen fisik lainnya. Kerangka memiliki fungsi utama sebagai tempat atau kedudukan dari komponen-komponen pembentuk robot. Selain itu kerangka juga akan menentukan efisiensi kerja dari robot tersebut. Materi pembentuk kerangka robot terdiri dari beragam jenis dan disesuaikan dengan fungsi dan cara kerja robot yang akan dirancang nantinya. Ada beberapa alternatif jenis material pembentuk kerangka robot seperti bahan dari logam, kayu, fiber dan plastic. Jenis material pembentuk kerangka robot akan sangat mempengaruhi konstruksi robot seperti ketahanan, berat, serta kekuatan robot dalam melakukan tugas-tugasnya. Salah satu cara terbaik dalam menghasilkan kerangka robot yang ideal adalah dengan cara mengkombinasikan jenis-jenis material yang berbeda sesuai letak kebutuhannya. Contohnya menggunakan material logam alumunium yang dapat menyerap panas pada bagian tempat dudukan motor ataupun komponen lain seperti motor yang cenderung panas apabila robot sedang beroperasi. Selain itu acrylic juga merupakan bahan pembentuk robot yang ideal.Dibandingkan dengan material lain, bahan acrylic jauh lebih ringan sehingga tidak terlalu menambah berat robot yang terdiri dari komponen-komponen berat lainnya. Berat dari robot sangat berpengaruh dalam menentukan kinerja robot. Robot yang ringan akan lebih mudah bergerak dan menghemat tenaga robot tersebut.
ringan, kuat, tidak mudah rusak dan sangat mudah dalam proses pengerjaannya. Potongan-potongan acrylic dan alumunium yang digunakan sebagai bahan pembentuk kerangka robot akan dihubungkan menggunakan spacer berukuran 3,5 cm. kerangka robot pembuat lubang resapan biopori akan dibentuk sesuai kebutuhan tempat dudukan rangkaian-rangkaian elektronik serta komponen-komponen robot sehingga membentuk menyerupai badan dasar robot. Baterai akan diletakkan pada acrylic yang diapit denga 8 buah gear roda disisi kanan dan kiri serta nantinya ditutup dengan acrylic tempat dudukan dari modul-modul elektronik pembentuk robot. Desain yang demikian bertujuan untuk melindungi modul-modulelektronik serta komponen-komponen tersebut dari kerusakan. Posisi Masing-masing modul elektronik dan komponen akan diperkuat dengan mur dan baut sehingga aman terhadap getaran yang muncul pada saat pengoperasian robot berlangsung.
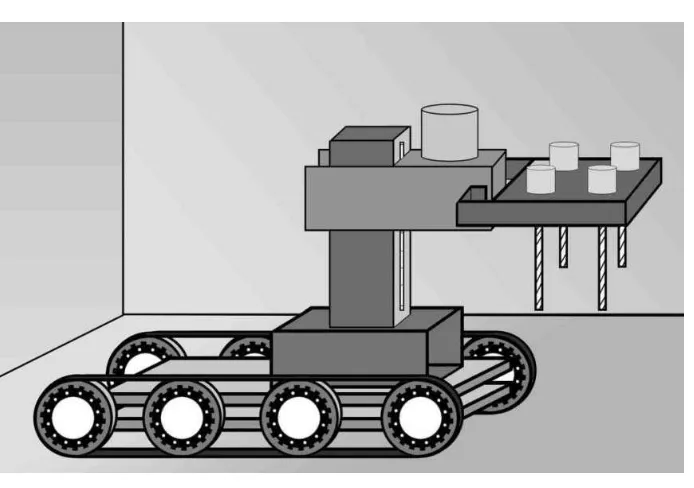
[image:31.595.145.492.363.607.2].
Gambar 3.5 Desain Kerangka Robot Pembuat LRB.
arduio uno sebagai sistem minimum, dan driver motor, serta beberapa kompnen lain sepeti Servo, gearbox, motor DC yang terletak pada bagian mesin pengali dan pada bagian roda. Robot pembuat lubang resapan biopori terdiri dari 4 buah gear pembentuk roda pada sisi kanan dan kiri. Masing-masing gear dihubungkan menggunakan rantai sehingga bentuk roda menyerupai roda pada mobil tank. Desain roda yang menyerupai roda pada mobil tank bertujuan untuk mengurangi resiko robot terjebak ataupun terbalik karena lubang atau dataran yang tidak rata. Roda pada sisi kanan dan kiri masing-masing terhubung langsung dengan sebuah motor servo yang difungsikan sebagai motor DC.
2.2.4. Perancangan Sistem Mekanik Robot
Sistem mekanik robot merupakan bagian yang harus diperhatikan dengan detail Karena memiliki peran penting dalam mendukung kinerja robot. Robot pembuat lubang resapan biopori memiliki tiga bagian sistem mekanik yaitu sistem mekanik pada roda, system mekanik mesin penggali serta system mekanik penggerak mesin penggali. Setiap sistem mekanik didesain berbeda-beda karena masing-masing sistem memiliki cara kerja yang berbeda-beda pula. Selain itu bentuk dari sistem mekanik tersebut harus disesuaikan dengan desain kerangka robot yang akan dibuat.
3.2.4.1. Sistem Mekanik Roda
Gambar 3.6 Sistem Mekanik Roda.
Motor yang digunakan pada sistem mekanik roda adalah jenis motor servo. Motor servo dipilih karena memiliki karakteristik yang sesuai dengan sistem mekanik roda. Motor servo dapat difungsikan menjadi motor dc yang dapat berputar 360 derajat hanya dengan menonaktifkan driver yang terdapat di dalam motor servo tersebut. Selain itu motor servo yang memiliki bentuk kubus, dengan motor dc dan gear box dalam satu kemasan dapat mempermudah proses perakitan dan menghemat area tata letak pada badan robot.
3.2.4.2.Sistem Mekanik Penggerak Mesin Penggali
Gambar 3.7 Sistem Mekanik Penggerak Mesin Penggali.
Sistem mekanik penggerak mesin penggali membutuhkan torsi yang besar karena mesin penggali membutuhkan tekanan yang kuat dalam proses penggalian tanah. Seain itu posisi dari sistem mekanik ini harus ditentukan dengan baik sehingga cara kerjanya lebih efesien. Untuk itu pada sistem ini dibutuhkan desain gearbox yang berbeda dari sistem mekanik sebelumnya. Karena sistem ini membutuhkan desain gearbox yang berbeda Maka motor dc merupakan jenis motor yang ideal untuk dipergunakan pada sistem ini. Motor dc dan gear box akan dibentuk sedemikian rupa sehingga desain dan kebutuhan torsi yang diperlukan dapat terwujud.
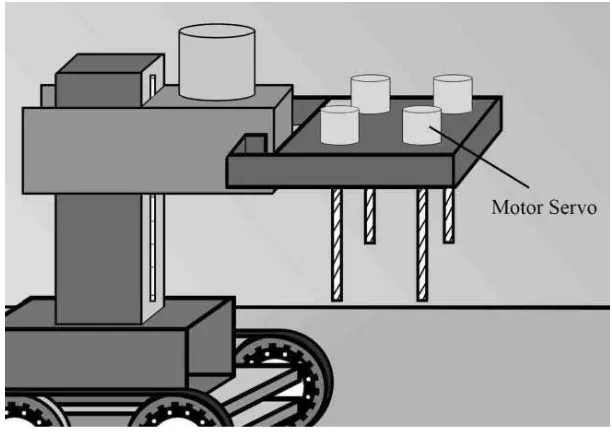
3.2.4.3. Sistem Mekanik Mesin Penggali
Gambar 3.8 Sistem Mekanik Mesin Penggali.
Disesuaikan dengan kebutuhan robot yang dapat menghasilkan empat buah lubang dalam sekali penggalian, maka sistem ini terbentuk dari empat buah motor. Motor yang dipergunakan dalam sistem ini adalah motor servo karena memiliki bentuk dan karakteristik yang sesuai dengan desain robot. Motor servo yang berbentuk kubus serta memiliki motor dc dan gearbox dalam satu kemasan dapat mempermudah proses perakitan karena ukuran mesin penggali harus disesuaikan dengan spesifikasi lubang resapan bioporiyang ideal. Sama halnya dengan system mekanik roda, motor servo pada system mekanik mesin penggali difungsikan sebagai motor dc yang dapat berputar 360 derajat.
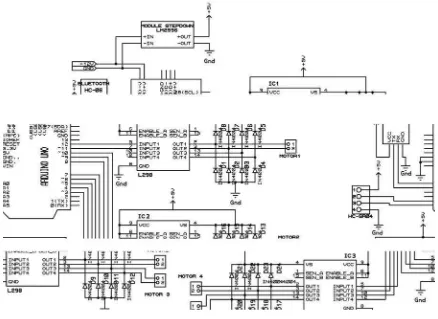
3.2.5. Perancangan Sirkuit Elektronik
Gambar 3.9 Sirkuit Elektronik.
Rangkaian elektronik robot pembuat lubang resapan biopori terdiri beberapa rangkaian elektronik sederhan dari beberapa bagian pembentuk robot yang terhubung menjadi satu rangkaian. Beberapa rangkaian tersebut dihubungkan pada sistem minimum yang merupakan modul Arduino uno sehingga dapat terintegrasi satu sama lain. Rangkaian elektronik robot pembuat lubang resapan biopori terdiri dari tiga buah module driver motor LM298, empat buah module penurun tegangan LM2596, sebuah module sensor Hc-SR05, dan module Bluetooth Hc-06 yang terhubung dengan Arduino uno.
3.2.5.1. Perancangan Rangkaian Sumber Tegangan
elektronik pembentuk robot membutuhkan tegangan yang berbeda-beda. Untuk itu dibutuhkan beberapa rangkaian yang dapat menurunkan tegangan seperti modul step down LM2596. Rangkaian elektronik modul penurun tegangan dapat dilihat pada gambar 3.10.
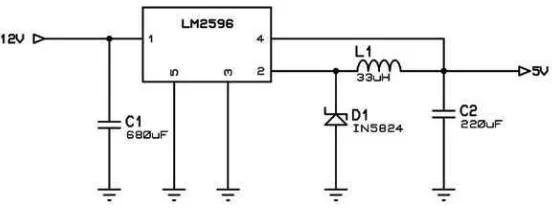
Gambar 3.10 Modul Step Down pada rangkaian elektronik robot LBR.
[image:43.595.177.456.522.630.2]Tegangan 12 V dari baterai akan dihubungkan ke modul penurun tegangan sehingga modul penurun tegangan LM2596 dapat menghasilkan tegangan idealyang dibutuhkan untuk disuplai ke beberapa rangkaian elektronik seperti module bluetooth, sensor ultrasonic dan driver motor. Modul stepdown LM5296 terdiri atas eberapa komponen yang saling terintegrasi. Rangkaian Modul stepdown LM5296 dapat dilihat pada gambar 3.11.
Gambar 3.11 Rangkaian elektronik Modul Step Down LM2596.
3.2.5.2.Perancangan Rangkaian Driver motor
Perancangan rangkaian driver adalah tahapan untuk menentukan jenis driver motor yang sesuai dengan kebutuhan robot pembuat lubang resapan biopori. Robot pembuat lubang resapan biopori menggunakan tuju buah motor dengan jenis motor servo dan motor DC. Motor-motor tersebut tersebar pada bagian roda, penggerak mesin penggali dan mesin penggali. Untuk itu masing masing bagian membutuhkan driver motor yang berfungsi untuk mengendalikan motor dengan baik. Driver motor L298 adalah salah satu driver motor yang banyak digunakan dalam pengendalian motor. Dengan menggunakan driver motor L298 tegangan dan arus yang disuplai ke motor dc ataupun motor servo dapat disesuaikan dengan kebutuhan dan spesifikasi dari masing-masing motor tersebut. Gambar rangkaian driver motor L298 pada penggerak mesin penggali dapat dilihat pada gambar 3.12.
Gambar 3.12 Rangkaian elektronik driver motor penggerak mesin penggali.
Gambar 3.13 Rangkaian elektronik driver motor roda.
Pada dasarnya driver motor L298 dapat mengendalikan dua buah motor sekaligus. Maka bagian roda robot hanya membutuhkan satu buah drvier untuk mengendalikan dua buah motor. Berbeda halnya pada pada driver motor di bagian mesin penggali. Masing-masing port pada driver motor akan dihubungkan dengan dua buah motor yang diparalelkan.
Gambar 3.14 Rangkaian elektronik driver motor Mesin Penggali.
3.2.6. Perancangan Program Mikrocontroller
dilakukan tanpa harus menggunakan perangkat seperti downloader. Program didesain dengan baik sehingga perangkat dapat membaca input dan melakukan output/proses dengan benar. Sedangkan bahasa pemrogaman untuk remote control pada smartphone android adalah bahasa basic. Pemrograman untuk remote control pada smartphone android akan dibuat menggunakan software Basic 4 Android. Software remote control akan didesain dengan tampilan antaruka yang mudah dipahami sehingga pengguna dapat megendalikan robot pembuat lubang resapan biopori dengan mudah.
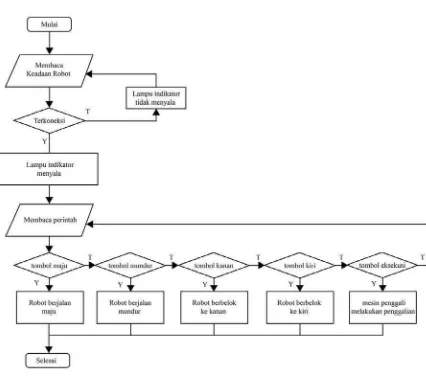
3.2.7. Flowchart Diagram
[image:49.595.127.553.349.726.2]Flowchart diagram pada gambar 3.15 menggambarkan fungsi IF dan ELSEyang ditempatkan pada proses penentuan koneksi Bluetooth dan penentuan gerakan yang akan dihasilkan oleh robot berdasarkan masing masing tumbol pada remote.
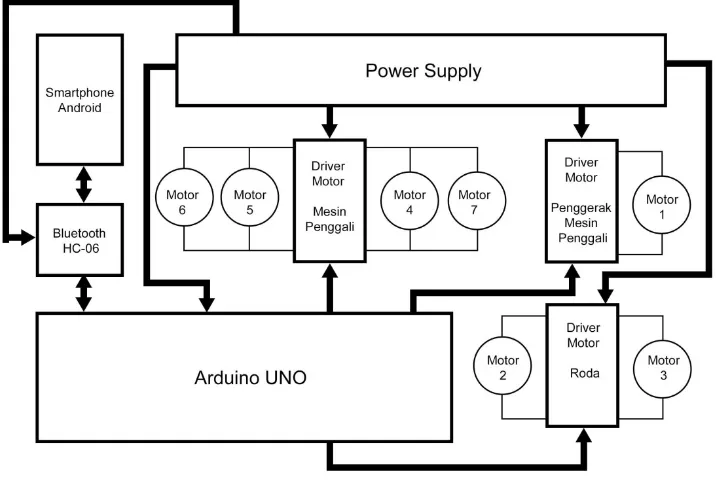
3.2.8. Perancangan Diagram Blok Robot Pembuat Lubang Biopori
[image:51.595.146.507.463.707.2]Robot pembuat lubang resapan biopori terdiri dari bagian-bagian kecil yang terhubung satu sama lain. Untuk itu dibutuhkan sebuah diagram blok yang dapat menggambarkan hubungan dari bagian-bagian tersebut. Pada tahap ini diagram block dirancang sehingga dapat menggambarkan setiap bagian dari sistem secara keseluruhan. Diagram blok dibuat untuk dapat menggambarkan alur kerja sistem dari robot pembuat lubang resapan biopori. Dapat dilihat pada gambar 3.14 bahwa module Bluetooth hc-06 merupakan penghubung antara papan microcontroller Arduino dan smartphone android. Dengan adanya sinyal Bluetooth maka smartphone android dapat digunakan sebagai remote control untuk mengendalikan robot. Perintah dari smartphone android yang diterima papan microcontroller Arduino uno melalui module Bluetooth hc-06 akan diproses. Hasil dari proses pengolahan data akan dikirim ke ke motor melalui masing-masing driver motor untuk dapat mengendalikan gerakan motor pada masing-masing bagian. Power supply berperan untuk menyuplai tegangan ke setiap bagian yang membutuhkan tegangan. Dapat dilihat pada gambar 3.16 power supply menyuplai tegangan hampir ke seluruh bagian yang membutuhkan tegangan kecuali smartphone android.
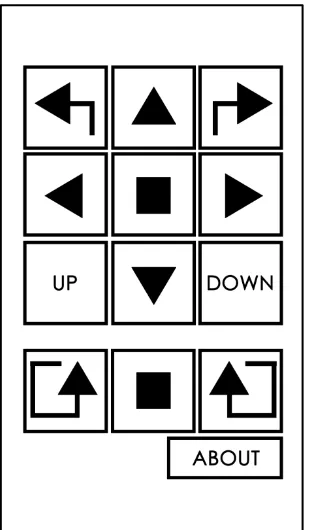
3.2.9. Perancangan Interface Remote Control
[image:53.595.240.395.235.500.2]Perancangan interface remote control bertujuan untuk merancang desain remote control yang ideal sehingga dapat mempermudah pengguna dalam mengendalikan robot nantinya. Remote didesain menggunakan warna yang menarik serta symbol-simbol icon pada tombol yang mudah dipahami. Desain interface dari remote control dapat dilihat pada gambar 3.17.
BAB 4
IMPLEMENTASI DAN PENGUJIAN SISTEM
1.8. Implementasi Sistem
[image:55.595.146.486.364.601.2]Setelah dilakukan analisis dan perancangan pada bab 3, proses yang akan dilakukan selanjutnya adalah implementasi sistem berdasarkan perancangan yang telah dilakukan.
Gambar 4.1 Implementasi Robot Pembuat LBR.
alumunium dengan ketebalan 2 cm. Alasan utama penggunaan acrilyc dan alumunium adalah karena bahan yang cukup kuat , relatif ringan, mudah dalam pengerjaannnya serta mudah didapat. Secara keseluruhan bahan yang digunakan untuk membuat kerangka robot adalah acrilyc 3 mm, alumunium dengan ketebalan 2 cm, spacer berukuran 35 mm, baut berdiameter 3 mm dengan panjang 8 cm, kabel pengikat. Bahasa pemrograman yang digunakan dalam pemrograman arduino adalah bahasa C, sedangkan basic adalah bahasa yang digunakan pada pemrograman untuk remote control android.
4.1.1. Implementasi Konstruksi Utama Robot
Bahan yang digunakan untuk membuat kerangka robot adalah akrilik dengan tebal 3 mm, Alumunium dengan ketebalan 2 cm, spacer berukuran 15 mm, lem, gergaji, pengikat kabel, kertas pasir dan bor listrik dengan mata 3 mm. Kerangka robot dibuat dengan tiga tingkat dimana tingkat pertama digunakan untuk menempatkan baterai, system mekanik roda dan tempat melekatnya tiang alumunium penyangga mesinpenggali, tingkat kedua digunakan untuk menempatkan rangkaian elektronik seperti driver motor, system minimum arduino uno dan modul stepdown dan tingkat ketiga dimana tempat meletakkan mesin penggali dan penggeraknya. Untuk kerangka robot tingkat pertama dapat dilihat pada gambar 4.2.
Gambar 4.2 Implementasi Kerangka Robot tingkat pertama
penggali ditempatkan. Masing-masing komponen pembenuk kerangka tersebut direkatkan menggunakan baut dengan panjang 8 cm dan diperkokoh menggunakan mur. Akrilik utama juga berfungsi sebagai tempat dudukan sistem meanik robot. Sistem mekanik robot ditutup kembali menggunakan sebuah akrilik hijau berukuran 37 cm x 5 cm. Untuk kerangka robot tingkat kedua dapat dilihat pada gambar 4.3.
Gambar 4.3 Implementasi Kerangka Robot tingkat kedua
tersebut dari getaran yang terjadi ketika robot bergerak. Untuk kerangka robot tingkat ketiga dapat dilihat pada gambar 4.4.
Gambar 4.4 Implementasi Kerangka Robot tingkat ketiga
Kerangka robot tingkat ketiga terdiri dari dua bagian yang melekat pada tiang penyangga alumunium. Bagian tersebut direkatkan mengguanakan baut dengan panjang 8 cm. Bagian pertama yaitu penggerak mesin penggali yang tediri dari motor, gearbox dan sensor ultra sonic. Bagian kedua yaitu bagian mesin penggali yang terdiri dari empat buah motor servo beserta mata bor yang melekat pada potongan kayu berukuran 14 cm x 14 cm dengan ketebalan 2 cm. Bagian kedua akan bergerak kebawah ketika proses penggalian dilakukan.
Tiang penyangga alumunium sangat berperan penting dalam pembentukan konstruksi kerangka robot. Tiang penyangga berfungsi sebagai penahan berat beban dari mesin penggali dan motor penggeraknya. Selain itu tiang penyangga juga berperan penting untuk menjaga keseimbangan robot. Tiang penyangga terdiri atas
lima batang alumunium dengan ukuran yang berbeda-beda. Empat batang berukuran 18 cm x 4,5 cm dan satu batang berukuran 39 cm x 4,5 cm. batang-batang alumunimu tersebut di bentuk sehingga mampu menahan berat beban dari bagian mesin penggali dan penggerak mesin penggali. Untuk merekatkan batang-batang alumunium tersebut dilakukan proses pengelasan sehingga menjadi lebih kuat. Dua buah akrilik digunakan sebagai tambahan penutup tiang penyangga agar sambungan antara batang-batang alumunium tidak gampang terlepas akibat getaran yang dihasilkan ketika robot bekerja. Kedua akrilik tersebut direkatkan ke bagian tiang penyangga menggunakan baut dengan panjang 8 cm dan di pererat menggunakan mur. Implementasi kerangka tiang penyangga alumunium dapat dilihat pada gambar 4.5.
Gambar 4.5 implementasi kerangka Tiang Penyangga Alumunium
4.1.2. Implementasi Sistem Mekanik robot
4.1.2.1. Implementasi Sistem Mekanik Roda
Sistem mekanik roda diimplementasikan sesuai dengan kebutuhan dari robot yang bergerak pada medan tanah, untuk itu roda pada robot dibentuk menggunakan gear dan rantai sehingga menyerupai roda pada mobil tank. Desain yang menyerupai roda pada mobil tank bertujuan untuk membuat robot dapat berjalan dengan baik pada medan yang tidak rata ataupun berlubang. Implementasi sistem mekanik roda dapat dilihat pada gambar 4.6.
Gambar 4.6 Implementasi Sistem Mekanik Roda
4.1.2.2.Implementasi Sistem Mekanik Pengerak Mesin Penggali
[image:65.595.218.416.245.553.2]Sistem mekanik pada penggerak mesin penggali hanya menggunakan sebuah actuator yaitu motor dc yang dimodifikasi menggunakan gear tambahan sehingga torsi yng dihasilkan menjadi lebih besar. Implementasi sistem mekanik penggerak mesin penggali dapat dilihat pada gambar 4.7.
Gambar 4.7 Implementasi Sistem Mekanik Penggerak Mesin Penggali
Gambar 4.8 Gear Penggerak Mesin Penggali
4.1.2.3. Implementasi Sistem Mekanik Mesin Penggali
[image:67.595.170.463.490.724.2]Sistem Mekanik pada mesin penggali menggunakan empat buah actuator yaitu motor servo. Setiap motor dihubungkan dengan sebuah mata bor berdiameter 10 mm sebagai alat penggali. Implementasi system mekanik mesin penggali dapat dilihat pada gambar 4.9.
Pada system ini motor servo dimodifikasi sehingga berfungsi sebagai motor dc yang dapat berputar 360º. Driver yang terdapat dalam box motor servo tidak difungsikan sehingga motor servo dapat berputar 360º. Tujuan dimodifikasinya motor servo agar mempermudah penulis dalam penempatan motor tersebut pada baagian mesin penggali. Selain itu penulis dapat memanfaatkan gear box yang terdapat dalam motor servo tersebut agar torsi yang dihasilkan menjadi lebih besar.
4.1.3. Implementasi Catu Daya
[image:69.595.197.437.433.730.2]Catu daya berfungsi untuk mensuplai tegangan ke seluruh komponen pada robot Pembuat lubang resapan biopori. Jenis catu daya yang digunakan adalah baterai valve regulated lead-acid. Output yang dihasilkan adalah 12 volt dengan daya 7,2 Ah. Output dari batrai akan dihubungkan ke module arduino dan tiga buah module stepdown lm2596 sehingga tegangan yang dikeluarkan menjadi 5 volt lalu dihubungkan ke modul driver motor l298 untuk mengendalikan motor. Implementasi catu daya dapat dilihat pada gambar 4.10.
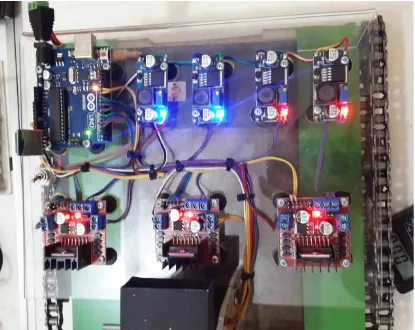
4.1.4. Implementasi Rangkaian Elektronik
[image:71.595.107.532.471.676.2]Pada Robot pembuat lubang resapan biopori penulis memanfaatkan modul-modul rangkaian listrik yang umum dijual dipasaran guna mempermudah proses perakitan dan menghemat waktu pengerjaan. Modul Rangkaian elektronik yang digunakan adalah modul arduino uno sebagai system minimum, modul step down LM 2596 sebagai rangkaian penurun tegangan (Step Down), serta module driver motor L298 sebagai Driver motor. Masing-masing komponen elektronik dari modul-module tersebut telah tersolder pada pcb sehingga penulis tidak lagi melakukan proses pencetakan layout pada pcb, pelarutan sampai dengan penyolderan komponen. Dengan menggunaan modul-modul elektronik yang banyak dijual dipasaran kegagalan perakitan rangkaian listrik dapat diminimalisir sehingga dapat menghemat waktu dan biaya dalam pembuatan robot pembuat lubang resapan biopori. Penulis menggunakan teknik pengkabelan dalam proses perakitan rangkaian elektronik pada robot. Proses pengkabelan bertujuan agar masing-masing modul dan komonen elektronik seperti motor DC dan motor servo yang letaknya berjauhan dapat terhubung satu sama lain. Implementasi rangkian elektronik dapat dilihat pada gambar 4.11.
4.1.4.1. Implementasi Rangkaian sistem minimum
[image:73.595.125.508.261.497.2]Sistem minimum adalah rangkaian dasar yang digunakan untuk mengoperasikan sebuah mikrokontroler. Rangkaian sistem minimum terdiri dari osilator (cystal), sistem reset dan catu daya. Berdasarkan rangkaian system minimum tersebut dibuat suatu board yang berfungsi untuk menggabungkan fungsi dasar dan fungsi pengendalian yaitu board mikrokontroller dapat dilihat pada gambar 4.12.
Gambar 4.12 Implementasi Sistem Minimum.
4.1.4.2. Implementasi Rangkaian Driver Motor
Driver motor diimplementasikan menggunakan modul l298. Modul driver motor akan beroperasi sesuai perintah yang diterima dari microcontroller melalui port yang terdapat pada system minimum. Disesuaikan dengan kebutuhan robot yang memiliki tujuh buah motor, penulis mengunakan tiga buah driver motor l298 untuk mengontrol ketujuh buah motor tersebut. Implementasi rangkian elektronik driver motor dapat dilihat pada gambar 4.13.
Gambar 4.13 Implementasi Rangkaian Driver Motor.
4.1.4.3. Implementasi Rangkaian Sumber tegangan
Rangkaian sumber tegangan dibutuhkan untuk proses penurunan tegangan. Pada rangkaian elektronik robot pembuat lubang reapan biopori, beberapa komponen membutuhkan tegangan yang lebih kecil dari tegangan yang disuplai oleh baterai secara langsung. Implementasi rangkian elektronik sumber tegangan dapat dilihat pada gambar 4.14.
.
Gambar 4.14 Implementasi Rangkaian Sumber Tegangan.
Penulis menggunakan empat buah modul lm2596 sebagai converter tegangan 12 volt. Kelebihan modul lm2596 adalah tegangan yang dikeluarkan dapat di atur sesuai kebutuhan dari masing-masing modul yang digunakan. Masing-masing converter tegangan mensuplai tegangan sebesar 5 volt ke driver motor penggerak roda, dirver motor mesin penggali, Bluetooth, sensor ultrasonic, dan 6 volt ke driver pengerak mesin penggali. Dengan adanya converter masing-masing komponen yang menerima suplai tegangan diawah 12 volt dapat terlindungi dari kerusakan.
4.1.4.4. Implementasi Bluetooth
Bluetooth pada rangkian elektronik robot pembuat lubang resapan biopori dapat dilihat pada gambar 4.15.
Gambar 4.15 Implementasi Bluetooth.
4.1.4.5. Implementasi Sensor Ultrasonic
Gambar 4.16 Implementasi sensor ultrasonic.
4.2. Implementasi Perangkat Lunak
Penulis menggunakan dua buah software pengembang program yaitu arduino ide untuk membuat program pada microcontroller dan basic 4 android untuk pemrograman pada remot control android.
4.2.1. Implementasi Program Microcontroller
Gambar 4.17 Implementasi pemrograman Microcontroller. 4.2.1.1. Potongan Program Microcontroller
Potongan Program untuk mengontrol pergerakan roda robot sehingga robot dapat bergerak maju, mundur, belok kiri dan belok kanan.
case STOP:
digitalWrite(pinMtrBan [0],LOW); digitalWrite(pinMtrBan [1],LOW); digitalWrite(pinMtrBan [2],LOW); digitalWrite(pinMtrBan [3],LOW); digitalWrite(pinMtrNaikTurun [0],LOW); digitalWrite(pinMtrNaikTurun [1],LOW); digitalWrite(pinMtrBor [0],LOW);
Potongan Program untuk mengontrol pergerakan penggerak mesin penggali sehingga mesin penggali dapat mengubah posisi mesin penggali dari posisi turun dan naik.
case NAIK:
if (jarak > 2){
digitalWrite(pinMtrNaikTurun [0],LOW); digitalWrite(pinMtrNaikTurun [1],HIGH); digitalWrite(pinMtrBor [0],LOW); digitalWrite(pinMtrBor [1],HIGH); digitalWrite(pinMtrBor [2],LOW); digitalWrite(pinMtrBor [3],HIGH); }else{ digitalWrite(pinMtrNaikTurun [0],LOW); digitalWrite(pinMtrNaikTurun [1],LOW); digitalWrite(pinMtrBor [0],LOW); digitalWrite(pinMtrBor [1],LOW); digitalWrite(pinMtrBor [2],LOW); digitalWrite(pinMtrBor [3],LOW); } break; case TURUN: if (jarak < 12 ){
digitalWrite(pinMtrBor [2],LOW); digitalWrite(pinMtrBor [3],LOW); }
break;
Potongan Program untuk mengontrol mesin penggali sehingga mesin penggali dapat mengubah arah putaran mata bor dari kekanan, kekiri hingga berhenti.
case BORPUTARSTOP: digitalWrite(pinMtrBor [0],LOW); digitalWrite(pinMtrBor [1],LOW); digitalWrite(pinMtrBor [2],LOW); digitalWrite(pinMtrBor [3],LOW); break; case BORPUTARKANAN: digitalWrite(pinMtrBor [0],HIGH); digitalWrite(pinMtrBor [1],LOW); digitalWrite(pinMtrBor [2],HIGH); digitalWrite(pinMtrBor [3],LOW); break; case BORPUTARKIRI: digitalWrite(pinMtrBor [0],LOW); digitalWrite(pinMtrBor [1],HIGH); digitalWrite(pinMtrBor [2],LOW); digitalWrite(pinMtrBor [3],HIGH); break;
bernilai low makan actuator tidak akan berputar. Ketika output bernilai high dan low maka motor akan berputar ke kanan begitupun sebaliknya.
4.2.1.2. Skema Proses Penanaman Program di Mikrokontroller.
Penanaman program pada microcontroller yang terdapat dalam modul arduino uno jauh lebih mudah dan praktis bila dibandingkan dengan penanaman program microcontroller pada umumnya. Biasanya proses penanaman program pada microcontroller membutuhkan perangkat lain seperti downloader, software pendukung seperti progisp dan perangkat lainnya. Berbeda dengan proses penanaman program pada arduino, listing program yang telah dibuat pada software arduino ide dapat langsung dicompile dan diupload ke microcontroller melalui software tersebut dengan menggunakan kabel usb. Proses penanaman program pada microcontroller dapat dilihat pada gambar 4.18.
Gambar 4.18Penanaman pemrograman Microcontroller.
4.2.2. Implementasi Program Remote control
Gambar 4.19 Implementasi pemrograman Remote control.
Project remote control dapat langsung dicompile ke perangkat android dengan menggunakan Bluetooth dan software penghubung B4A-Bridge Plus. Desain interface remote control android dapat dilihat pada gambar 4.20.
[image:93.595.242.393.444.707.2]Robot pembuat lubang reapan biopori dikontrol menggunakan 13 buah tombol dan 2 buah menu item. Fungsi dari masing-masing tombol dan menu item dapat dilihat pada table 4.1.
Tabel 4.1Fungsi Tombol Remote Control.
Nama Desain Keterangan
Tombol Berput ar Kiri Robot bergerak berputar kearah kiri Tombol Berput ar Kanan Robot berputar kearah
kanan
Tombol Maju Robot bergerak maju
Tombol Mundur Robot bergerak mundur
Tombol Kiri Robot berbelok ke kiri
Tombol Kanan Robot berbelok ke kanan
Tombol Stop Semua gerakan robot
berhenti
Tombol Naik Posisi mesin penggali
bergerak naik
Tombol Turun Posisi mesin penggali
bergerak turun Tombol Bor Berputar Kiri Bor berputar kearah kiri
Tombol Bor Berputar Kanan
Bor berputar kearah kanan
Tombol Bor Stop Bor berhenti berputar
Tombol About Menampilkan panel
Tombol Close Mentup panel informasi robot
Menu Item Connect Menjalankan koneksi antara robot dan remote Menu Item Disconnect Memutuskan koneksi antara
robot dan remote
4.2.2.1.Potongan Program Remote Control
Sub btnmaju_Click SendData("3#") End Sub Sub btnkiri_Click SendData("5#") End Sub Sub btnkanan_Click SendData("6#") End Sub Sub btnmundur_Click SendData("4#") End Sub Sub btnstop_Click SendData("10#") End Sub Sub btnbelokkiri_Click SendData("7#") End Sub Sub btnbelokkanan_Click SendData("8#") End Sub Sub btnnaik_Click SendData("1#") End Sub Sub btnturun_Click SendData("2#") End Sub Sub btnstopbor_Click SendData("16#") End Sub Sub btnputarkiribor_Click SendData("14#") End Sub Sub btnputarkananbor_Click SendData("15#") End Sub Sub btnabout_Click StartActivity("about") End Sub
berupa angka yang telah disesuaikan dengan program yang ada pada microcontroller. Setiap data yang dikirim akan menentukan pergerakan dari robot apakah bergerak maju, mundur, melakukan penggalian dan sebagainya.
4.3. Pengujian Sistem
Pengujian sistem dilakukan agar dapat mengetahui apakah sistem yang telah dibangun dapat berjalan dengan baik sesuai dengan cara kerja robot yang telah direncanakan. Dalam tahapan pengujian sitem, robot diuji coba apakah mampu bergerak sesuai perintah yang disampaiakan melalui penekanan tombol pada remote control. Perintah-perintah yang dikirim sebagai input diharapkan dapat diproses oleh microcontroller dan menghasilkan output berupa gerakan. Beberapa pengujian yang dilakukan pada sistem ini adalah pengujian inputrobot, pengujian system mekanik robot, serta pengujian koneksi bluetooth.
4.3.1. Pengujian Input Robot
Pengujian ini dilakukan untuk melihat apakah button pada Smartphone Android akan berfungsi pada robot. Jika tahap pengujian smartphone android ini telah berhasilberarti hubungan antarmuka smartphone dan sistem bluetooth serta mikrokontroleryang dirangkai sudah berfungsi dengan baik.
4.3.1.1.Pengujian Menu Item Connect
Sub mnuConnect_Click
Dim PairedDevices AsMap
PairedDevices = Serial1.GetPairedDevices
Dim l AsList l.Initialize
For i = 0To PairedDevices.Size - 1
l.Add(PairedDevices.GetKeyAt(i))
Next
Dim res AsInt
res = InputList(l, "Choose device", -1)
If res <>DialogResponse.CANCEL Then
EndIf
End Sub
Ketika menu item connect disentuh pada layar android maka software remote control akan menampilkan daftar paired devices yang telah terdata oleh smartphone android. Kemudian user dapat memilih salah satu paired device yang merupakan identitas dari Bluetooth robot pembuat lubang resapan biopori. Identitas bluetooth dari robot dapat terdata apbila telah dilakukan proses pairing manual melalui menu pengaturan bluetooth pada smartphone android.
4.3.1.2.Pengujian Menu Item Disconnect
Sub mnuDisconnect_Click
IfconnectedThen
AStreams.Close
EndIf
End Sub
Ketika menu item disconnect di sentuh pada layar smartphone android maka program akan melakukan pengecekan keadaan apabila perangkat terkoneksi maka tutup koneksi sehingga koneksi antara robot dan remote terputus.
4.3.1.3.Pengujian Input Tombol Berputar Kiri
Sub btnbelokkiri_Click
SendData("7#")
Ketika tombol Berputar Kiri disentuh pada layar smartphone android, maka remote control akan mengirim data benilai 7. Setelah data diterima oleh robot lalu microcontroller akan mengeksekusi case PUTARKIRI.
4.3.1.4.Pengujian Input Tombol Berputar Kanan
Sub btnbelokkanan_Click
SendData("8#")
End Sub
Ketika tombol Berputar Kanan disentuh pada layar smartphone android, maka remote control akan mengirim data benilai 8. Setelah data diterima oleh robot lalu microcontroller akan mengeksekusi case PUTARKANAN.
4.3.1.5. Pengujian InputTombol Maju
Sub btnmaju_Click
SendData("3#")
End Sub
4.3.1.6.Pengujian Input Tombol Mundur
Sub btnmundur_Click
SendData("4#")
End Sub
Ketika tombol Mundur disentuh pada layar smartphone android, maka remote control akan mengirim data benilai 4. Setelah data diterima oleh robot lalu microcontroller akan mengeksekusi case MUNDUR.
4.3.1.7. Pengujian Input Tombol Kiri
Sub btnkiri_Click
SendData("5#")
End Sub
Ketika tombol Kiri disentuh pada layar smartphone android, maka remote control akan mengirim data benilai 5. Setelah data diterima oleh robot lalu microcontroller akan mengeksekusi case KIRI.
4.3.1.8. Pengujian Input Tombol Kanan
Sub btnkanan_Click
SendData("6#")
Ketika tombol Kanan disentuh pada layar smartphone android, maka remote control akan mengirim data benilai 6. Setelah data diterima oleh robot lalu microcontroller akan mengeksekusi case KANAN.
4.3.1.9.Pengujian Input Tombol Stop
Sub btnstop_Click
SendData("10#")
End Sub
Ketika tombol Stop disentuh pada layar smartphone android, maka remote control akan mengirim data benilai 10. Setelah data diterima oleh robot lalu microcontroller akan mengeksekusi case STOP.
4.3.1.10. Pengujian Input Tombol Naik
Sub btnnaik_Click
SendData("1#")
End Sub
4.3.1.11. Pengujian Input Tombol Turun
Sub btnturun_Click
SendData("2#")
End Sub
Ketika tombol Turun disentuh pada layar smartphone android, maka remote control akan mengirim data benilai 2. Setelah data diterima oleh robot lalu microcontroller akan mengeksekusi case TURUN.
4.3.1.12. Pengujian Input Tombol Bor Berputar Kiri
Sub btnputarkiribor_Click
SendData("14#")
End Sub
Ketika tombol Bor berputar Kiri disentuh pada layar smartphone android, maka remote control akan mengirim data benilai 14. Setelah data diterima oleh robot lalu microcontroller akan mengeksekusi case BORPUTARKIRI.
4.3.1.13. Pengujian Input Tombol Bor Berputar Kanan
Sub btnputarkananbor_Click
SendData("15#")
Ketika tombol Bor berputar Kanan disentuh pada layar smartphone android, maka remote control akan mengirim data benilai 14. Setelah data diterima oleh robot lalu microcontroller akan mengeksekusi case BORPUTARKANAN.
4.3.1.14. Pengujian Input Tombol Bor Stop
Sub btnstopbor_Click
SendData("16#")
End Sub
Ketika tombol Bor stop disentuh pada layar smartphone android, maka remote control akan mengirim data benilai 16. Setelah data diterima oleh robot lalu microcontroller akan mengeksekusi case BORPUTARSTOP.
4.3.1.15. Pengujian Input Tombol About
Sub btnabout_Click
Panel1.Visible=True End Sub
4.3.1.16. Pengujian Input Tombol Close
Sub btnclose_Click
Panel1.Visible=False End Sub
[image:113.595.237.396.386.672.2]Ketika Tombol About disentuh maka perintah Panel1.Visible=False akan dieksekusi sehingga dapat menghilangkan tampilan panel1. Panel1 adalah panel yang menampilkan informasi tentang penulis dan robot pembuat lubang resapan biopori. Tampilan panel1 dapat dilihat pada gambar 4.20.
4.3.2. Pengujian Sistem Mekanik Robot
Pengujian system mekanik robot dilakukan untuk menguji tiga buah system mekanik yang terdapat pada robot. Pengujian system mekanik sangat dibutuhkan karena pergerakan baik tidaknya pergerakan robot ditentukan dari ketiga buah sistem mekanik tersebut. keiga system mekanik tersebut adalah system mekanik roda, system mekanik penggerak mesin penggali dan system mekanik mesin penggali.
4.3.2.1. Pengujian Sistem Mekanik Roda
Pengujian system mekanik roda dilakukan untuk melihat apakah roda pada robot telah bekerja sesuai dengan program yang telah dibuat. Selain itu apakah tombol pada remote control dapat mengendalika pergerakan robot tersebut. Dalam pengujian system mekanik roda terdapat enam buah case yang akan diuji yaitu case PUTARKIRI, PUTARKANAN, MAJU, MUNDUR, KIRI, KANAN, dan STOP. Pengujian case PUTARKIRI pada program microcontroller dapat dilhat pada gambar 4.22.
Gambar 4.22Pergerakan Berputar Ke Kiri Pada Robot.
Pengujian case PUTARKANAN pada programmicrocontroller dapat dilhat pada gambar 4.23.
Gambar 4.23Pergerakan Berputar Ke Kanan Pada Robot.
[image:117.595.159.451.486.725.2]Setelah tombol berputar kanan di sentuh pada tampilan remote control, maka arah roda sebelah kanan berputar kearah belakang dan roda sebelah kiri berputar kearah depan sehingga robot dapat bergerak berputar kearah kanan.Pengujian case MAJU pada programmicrocontroller dapat dilhat pada gambar 4.24.
Setelah tombol maju di sentuh pada tampilan remote control, maka arah roda sebelah kanan dan sebelah kiri akan berputar kearah depan sehingga robot dapat bergerak maju. Pengujian case MUNDUR pada programmicrocontroller dapat dilhat pada gambar 4.25.
Gambar 4.25Pergerakan Mundur Pada Robot.
Setelah tombol mundur di sentuh pada tampilan remote control, maka arah roda sebelah kanan dan sebelah kiri akan berputar kearah belakang sehingga robot dapat bergerak mundur. Pengujian case KIRI pada programmicrocontroller dapat dilhat pada gambar 4.26.
Gambar 4.26Pergerakan Belok Kiri Pada Robot.
Setelah tombol kiri di sentuh pada tampilan remote control, maka arah roda sebelah kanan akan berputar kearah depan sedangkan roda sebelah kiri tidak menerima perintah berputar dari microcontroller. Kodisi seperti inilah yang dapat membuat robot dapat bergerak berbelok ke kiri.
Pengujian case KANAN pada programmicrocontroller dapat dilhat pada gambar 4.27.
Gambar 4.27Pergerakan Belok Kanan Pada Robot.
Setelah tombol kanan disentuh pada tampilan remote control, maka roda sebelah kanan tidak menerima perintah berputar sedangkan roda sebelah kiri akan berputar kearah depan. Kodisi seperti inilah yang dapat membuat robot dapat bergerak berbelok ke kanan.
Pengujian case STOP pada programmicrocontroller dapat dilhat pada gambar 4.28
Setelah tombol stop disentuh pada tampilan remote control, maka ketika robot sedang bergerak dan dalam posisi apapun maka robot akan berhenti. Ketika case stop dieksekusi maka tidak ada satupun motor yang berputar.
4.3.2.2. Pengujian Sistem Mekanik Pengerak Mesin Penggali
Pengujian system mekanik penggerak mesin penggali dilakukan untuk melihat apakah penggerak mesin penggali telah bekerja sesuai dengan program yang dibuat. Selain itu apakah tombol pada remote control dapat mengendalika pergerakan penggerak mesin penggali tersebut.Dalam pengujian system mekanik penggerak mesin penggali terdapat dua buah case yang akan diuji yaitu case NAIK dan case TURUN.
[image:121.595.130.516.338.512.2]Pengujian case NAIK pada programmicrocontroller dapat dilhat pada gambar 4.29
Gambar 4.29 Pergerakan Naik Pada Penggerak Mesin Penggali.
Gambar 4.30Pergerakan Turun Pada Penggerak Mesin Penggali.
Setelah tombol turun disentuh pada tampilan remote control, maka motor pada penggerak mesin penggali berputar kearah kiri. Kodisi seperti inilah yang dapat membuatmesin penggali bergerak turun.
4.3.2.3.Pengujian Sistem Mekanik Mesin Penggali
Pengujian system mekanik mesin penggali dilakukan untuk melihat apakah mesin penggali pada robot telah bekerja sesuai dengan program yang dibuat. Selain itu apakah tombol pada remote control dapat mengendalika pergerakan mesin penggali tersebut tersebut. Dalam pengujian system mekanik mesin penggali terdapat tiga buah case yang akan diuji yaitu case BORPUTARKIRI, BORPUTARKANAN, dan BORPUTARSTOP. Pengujian case BORPUTARKANAN pada programmicrocontroller dapat dilhat pada gambar 4.31.
Arah putaran bor sangat berpengaruh dalam proses penggalian. Ketika robot bersiap menggali, arah putaran bor haruslah berputar kearah kanan sehingga mata bor mampu mengikis permukaan tanah. Setelah tombol bor berputar kanan disentuh pada tampilan remote control, maka empat buah motor pada penggerak mesin penggali akan berputar kearah kanan. Pengujian case BORPUTARKIRI pada programmicrocontroller dapat dilhat pada gambar 4.32.
Gambar 4.32Mata Bor Mesin Penggali Berputar Kearah Kiri.
[image:125.595.180.454.213.421.2]Setelah tombol bor berputar kiri disentuh pada tampilan remote control, maka empat buah motor pada penggerak mesin penggali tidak berputar. Pengujian case BORPUTARSTOP pada programmicrocontroller dapat dilhat pada gambar 4.33
Arah putaran bor sangat berpengaruh dalam proses penarikan mata bor setelah proses penggalian selesai. Ketika robot bersiap menarik mata bor, arah putaran bor haruslah berputar kearah kiri sehingga mata bor mampu dengan mudah terlepas dari permukaan tanah. Setelah tombol bor berputar kiri disentuh pada tampilan remote control, maka empat buah motor pada penggerak mesin penggali akan berputar kearah kiri.
4.3.3. Pengujian Bluetooth pada Robot Pembuat Lubang Resapan Biopori
[image:127.595.182.447.306.520.2]Pengujian ini dilakukan untuk melihat apakah bluetooth eksternal dapat terkoneksi ketika menu item connect pada tampilan remot disentuh. Pengujian koneksi bluetooth dapat dilhat pada gambar 4.34.
Gambar 4.34Koneksi Bluetooth.
4.3.4. Dokumentasi Uji Coba Robot
[image:129.595.102.550.214.578.2]Dokumentasi data uji coba robot adalah data berbentuk table yang menggambarkan pergerakan robt pembuat lubang resapan biopori sesuai dengan ujicoba yang telah dilakukan.
Tabel 4.2Data Uji Coba Pergerakan Roda
Perintah Tombol
Pin Input
Arah Putaran Roda Roda Kiri Roda Kanan
0 1 2 3 Roda
Kiri
Roda Kanan
Berputar Kiri LOW HIGH HIGH LOW
Berputar Kanan HIGH LOW LOW HIGH
Maju HIGH LOW HIGH LOW
Mundur LOW HIGH LOW HIGH
Kiri HIGH LOW LOW LOW
Kanan LOW LOW HIGH LOW
Stop LOW LOW LOW LOW
Tabel 4.3Data Uji Coba Proses Penggalian
[image:131.595.92.535.99.422.2]Dapat dilihat dari table 4.3 arah pergerakan masing-masing roda berdasarkan nilai high dan low yang dikirimkan module arduino uno ke input motor.
Tabel 4.4Data Uji Coba Waktu Proses Penggalian
Pengujian Koneksi Bluetooth
Pergerakan mesin penggali Bergerak turun Bergerak naik Pengujian 1 Terkoneksi 34 detik 31 detik Pengujian 2 Terkoneksi 35 detik 32 detik Pengujian 3 Terkoneksi 34 detik 30 detik Pengujian 4 Terkoneksi 36 detik 33 detik Pengujian 5 Terkoneksi 33 detik 32 detik
Rata-rata waktu 34,4 detik 31,6 detik
Dapat dilihat dari table 4.4 waktu yang dibutuhkan cenderung lebih banyak pada saat mesin penggali bergerak turun dan ketika mesin penggali bergerak naik waktu yang di butuhkan lebihsedikit beberapa detik.
Perintah Tombol
Pin Input Arah Putaran Motor Motor Penggerak mesin penggali Motor Mesin Penggali
0 1 0 1 2 3
Motor Penggerak mesin penggali Motor Mesin Penggali Mesin Penggali Naik
LOW HIGH LOW HIGH LOW HIGH
Mesin
Penggali
Turun
HIGH LOW HIGH LOW HIGH LOW
Bor Berputar
Kiri
LOW HIGH LOW HIGH
Bor Berputar
Kanan
HIGH LOW HIGH LOW
Tabel 4.5Data Uji Coba Jarak Koneksi Bluetooth
Jarak Status Kondisi
1 Meter Terkoneksi Sistem berjalan dengan baik 2 Meter Terkoneksi Sistem berjalan dengan baik 4 Meter Terkoneksi Sistem berjalan dengan baik 6 Meter Terkoneksi Sistem berjalan dengan baik 8 Meter Terkoneksi Sistem berjalan namun terdapat
sedikit delay 10 Meter Tidak Terkoneksi Sistem berhenti
BAB 5
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Berdasarkan hasil dari implementasi dan pengujian prototipe robot pembuat lubang resapan biopori bebrbasis arduino uno atmega 328p, maka penulis mengambil kesimpulan sebagai berikut:
1. Robot pembuat lubang resapan biopori merupakan tipe robot yang bergerak secara manual atau dikendalikan dengan remote control pada smartphone android. 2. Robot dapat terkoneksi dengan baik ke smartphone android dengan koneksi
Bluetooth pada jarak maksimal 8 meter.
3. Robot telah berhasil menggali empat buah lubang dalam sekali penggalian, dengan spesifikasi lubang biopori yang ideal.
4. Pada proses penggalian, waktu yang dibutuhkan Ketika mesin penggali bergerak turun lebih besar daripada waktu yang dibutuhkan ketika mesin penggali bergerak naik.
5.2. Saran
Berikut beberapa saran yang penulis berikan untuk pengembangan lebih lanjut dari penelitian ini:
2. Alur pergerakan robot dalam proses pembuatan lubang sebaiknya menggunakan alur maping sehingga robot dapat bergerak secara otomatis tanpa dipantau.
BAB 2
LANDASAN TEORI
2.1 Robotika 2.1.1. Sejarah Robot
Kata robot berasal dari bahasa Ceko yaitu robota, yang berarti pekerja. Menurut arti Bahasa, robot adalah alat mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, atau menggunakan program yang telah didefenisikan terlebih dahulu. Robot diperkenalkan pertama kali oleh Wright Karl Capek pada tahun 1920 melalui sandiwara komedi yang berjudul RUR (Rossum’s Universal Robots). Dalam sandiwara ini, diceritakan seorang tokoh ilmu pengetahuan bernama Rossum yang menciptakan bahan tiruan daging dan tulang melalui proses biologi dan elaktronik (Winarno & Arifianto, D. 2011).
2.1.2. Peran Robot Bagi Kehidupan Manusia
Dalam kehidupan manusia masa kini robot sudah banyak diaplikasikan dalam berbagai bidang. Secara umum robot berfungsi sebagai alat bantu manusia dalam menyelesaikan tugas yang terkadang sulit untuk diselesaikan karena membutuhkan konsentrasi dan resiko kecelakaan yang cukup besar. Bahkan ada juga robot bermain yang diciptakan hanya untuk menemani manusia dalam aktifitasnya sehari-hari. Dengan adanya robot tersebut manusia dapat terhibur ketika merasakan sedih, kesepian bahkan kejenuhan yang timbul disela-sela aktifitas yang padat.
Bentuk robot sangat bervariasi disesuaikan dengan kegunaanya masing-masing. Ada yang berbentuk seperti manusia, hewan, kendaraan dan sebagainya. Sebuah robot tidak perlu meniru semua tingkah laku manusia namun cukup dengan mengadopsi dua atau tiga system yang ada pada diri manusia seperti pendengaran, penglihatan, dan gerakan.
Dalam dunia industri, robot telah mengambil peran penting dalam menggantikan tugas manusia dalam beberapa bidang seperti industri perakitan mobil, elektronik dan industri pengemasan. Robot dalam dunia industri memberi banyak manfaat seperti mempercepat proses produksi serta kualitas produk yang dihasilkan lebih terjamin. Lain halnya dalam dunia medis, robot mengambil peran penting dalam membantu tenaga medis dalam melakukan tindakan operasi bedah misalnya bedah jantung, kanker dan operasi mata. Namun dalam dunia medis robot masih jarang dibiarkan untuk melakukan operasi secara otomatis atau tanpa dikendalikan oleh dokter. Dalam dunia antariksa robot telah digunakan untuk meneliti kehidupan di luar angkasa seperti robot Phoenix Lander yang diluncurkan pada tahun 2007 dalam misi penelitian di planet mars.
2.1.3. Jenis-jenis Robot
Secara umum, robot memiliki dua jenis yaitu robot terkontrol (controlled robot) yang dikendalikan oleh remote control dan robot automatis (autonomous robot) yang mampu mengambil keputusan sendiri. Tidak semua robot memiliki bentuk seperti manusia (robot humanoid) yang mempunyai tangan, kaki dan kepala. Ada beberapa robot yang hanya mempunyai tangan (robot manipulator), robot be