Robot VAcuum Cleaner Otomatis Berbasis Arduino
Teks penuh
Gambar



Garis besar
Dokumen terkait
To complete this mobile robot its require to design an efficient algorithm to enable smart vacuum clean the whole area... To achieve the goal of this project, research about
Dari hasil tabel 6 pengujian sudut kemiringan lintasan yang di lakukan sebanyak 3 percobaan dengan nilai sudut yang berbeda, didapatkan bahwa robot hanya mampu
1) Saat robot dalam kondisi menyala makan roda penggerak robot sesuai dengan sensor garis ( infrared dan photodioda ) yang membaca warna gelap dan warna terang
Kecepatan dalam sebuah robot beroda diperlukan, untuk menjalankan robot dari tempatnya semula ke segala tempat yang bisa dijangkau dan dalam segala medan, untuk
Dari hasil robot berjalan lurus, berputar kanan, berputar kiri dapat dilihat pada tabel 5, 6, 7, kurang sesuai dengan yang diharapkan, robot dapat dikatakan mampu bergerak dengan
Berdasarkan hasil hasil pengujian dan Analisa percobaan mobile robot yang telah dilakukan, jarak optimal pengendalian dari mobile robot tidak lebih dari 7,2 meter, dengan tanpa adanya
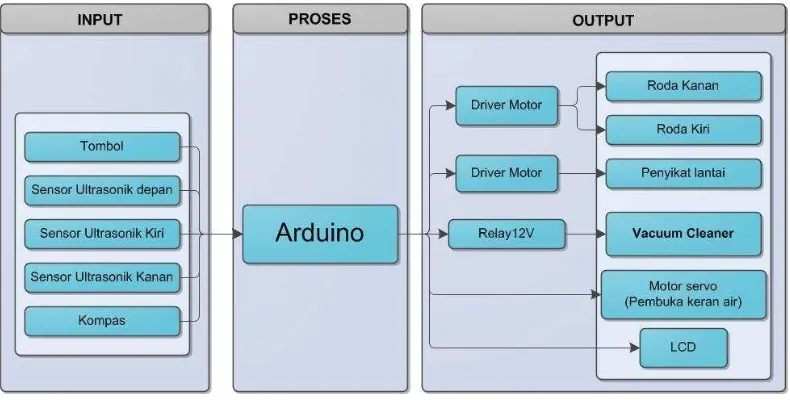
Hardware build in microcontroller Arduino Uno board, mini vacuum cleaner, ultrasonic sensor for sensing obstacles, voltage sensor, Lithium Polymer LiPo battery as the power source,
Grafik hasil dari percobaan robot berjalan maju ke depan dapat dilihat pada gambar berikut: Gambar 4.25 Grafik Percobaan Kesatu Robot Berjalan Maju Percobaan kesatu pada Gambar 4.25
