SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
BOGOR 2016
DESAIN DAN PENGUJIAN PROTOTIPE SISTEM KONTROL
MESIN SPRAYER DOSIS VARIABEL UNTUK APLIKASI
PENYEMPROTAN PERTANIAN PRESISI
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa tesis berjudul desain dan pengujian prototipe sistem kontrol mesin sprayer dosis variabel untuk aplikasi penyemprotan pertanian presisi adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, April 2016
Muhammad Rizal
RINGKASAN
MUHAMMAD RIZAL. Desain dan Pengujian Prototipe Sistem Kontrol Mesin Sprayer Dosis Variabel untuk Aplikasi Penyemprotan Pertanian Presisi. Dibimbing oleh I DEWA MADE SUBRATA dan RADITE PRAEKO AGUS SETIAWAN.
Usaha peningkatan produksi tanaman seringkali dihadapkan adanya gangguan hama dan penyakit. Pada setiap tanaman, dalam hal ini penyemprotan sebaiknya pemberian dosis pestisida menyesuaikan dengan serangan hama, dimana serangan yang parah diberikan dosis yang banyak, serangan menengah dengan dosis sedang, dan serangan sedikit diberikan dosis yang kecil. Oleh karena itu kebiasaan petani dalam mengatasi serangan hama dan penyakit perlu dirubah dengan cara melakukan penyemprotan pestisida sesuai kebutuhan pada tanaman (dosis variabel). Di Negara maju telah digunakan sistem pertanian presisi dimana faktor ketepatan dalam kegiatan pertanian sangatlah penting. Presisi ini mulai dari penanaman, pemberian pupuk, pemberantasan hama, sampai dengan pemanenan. Tujuan secara umum dari penelitian ini adalah untuk merancang, pabrikasi dan menguji kinerja prototipe sistem kontrol mesin sprayer dosis variabel untuk aplikasi penyemprotan pertanian presisi. Alat dan bahan yang digunakan yaitu peralatan konstruksi untuk pembuatan prototipe sprayer, peralatan elektronika untuk pembuatan sistem kontrol, dan peralatan untuk keperluan pengujian. Pendekatan rancangan terdiri dari dua jenis yaitu rancangan fungsional dan rancangan struktural. Fungsi dan struktur utama dari sistem yang dibuat adalah sistem pengontrolan terhadap kecepatan putaran motor pada sprayer, mengontrol lama semprotan, mengontrol dosis semprotan berdasarkan input intensitas serangan hama, dan urutan plot semprotan pada mikrokontroler. Pengukuran dan pengujian meliputi pengujian fungsional kinerja kontrol, kalibrasi alat ukur kecepatan putaran motor pompa dan jarak deteksi tanaman, pengujian laboratorium untuk ketepatan posisi semprotan, ketepatan volume semprotan dan ketepatan lama semprotan, dan pengujian lapangan berdasarkan kondisi tanaman dengan parameter pengukuran yaitu debit semprotan perplot tanaman dan lama semprotan perplot tanaman.
Hasil pengamatan dan pengukuran dilapangan diperoleh karakteristik tanaman yaitu serangan hama rata-rata 8.1% dan 15.5 % dengan tinggi tanaman 42 cm, diameter tanaman 30 cm dan 45 cm. Hasil uji laboratorium menunjukkan bahwa untuk mencapai debit semprotan yang sesuai dengan intensitas serangan hama digunakan PWM 100-250, kecepatan motor 217-592 rpm, lama semprotan 2-10 detik/tanaman, dan volume 2-10-70 ml/tanaman. Hasil uji lapangan pada 120 tanaman menggunakan debit semprotan 10 ml/detik dengan panjang setiap plot 10 m pada intensitas serangan hama 8.1 % dibutuhkan lama semprotan 20 detik, debit semprotan 8.3 ml/detik per plot tanaman pada intensitas serangan hama 15.5 % dibutuhkan lama semprotan 60 detik. Rata-rata nilai error untuk hasil volume semprotan dilahan berdasarkan perhitungan sebesar 34 % dan 13 %. Perbandingan antara prediksi dan aktual diperoleh akurasi volume semprotan sebesar 66 % untuk volume 200 ml dan 87 % untuk volume 500 ml.
Kata kunci: Kontrol PWM, Debit variabel, Penyemprotan VRT, penyemprotan tanaman kubis.
MUHAMMAD RIZAL. Development of Variable Rate Sprayer Control System and its Performance Test for Precission Farming Application. Supervised by I DEWA MADE SUBRATA and RADITE PRAEKO AGUS SETIAWAN.
Efforts to increase crop production are often faced with pests and diseases problem. At each plant, in this case the dosing pesticide spraying should conform with pest attacks, where a severe attack was given large doses, medium attack was given moderate doses, and light attack was given small doses. Therefore, the habit of farmers in overcoming pests and diseases attack need to be changed that was spraying pesticides based on crops needed (variable rate). Precision farming which emphasizes accuracy factor in agriculture activities have been used in some developed countries. It over whelm planting, fertilizer aplication, pest control and harvesting. The objective of this research was to design, fabricate and test prototype control system of variable dose sprayer for precision spraying. This research used tools and materials, i.e manufacturing equipment to build sprayer prototype, electronic equipment to construct control systems, and instrument for testing purposes. Design approach consists of functional and structural design. The main function of the control system was to control rotation of motor sprayer, to control spray duration and volume based on intensity of pest severity, spray dose, and sequence plot to spray. Test was done, included functional test of control system, calibration of instruments (i.e pump motor rotation), laboratory testing for accuracy of spraying (volume and spray duration), and field testing based on crop conditions by measuring parameters ie flow rate/each plot and spray duration/each plot.
© Hak Cipta Milik IPB, Tahun 2016
Hak Cipta Dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan IPB Dilarang mengumumkan dan memperbanyak sebagian atau seluruh karya tulis ini dalam bentuk apa pun tanpa izin IPB
DESAIN DAN PENGUJIAN PROTOTIPE SISTEM KONTROL
MESIN SPRAYER DOSIS VARIABEL UNTUK APLIKASI
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Sains
pada
Program Studi Teknik Mesin Pertanian dan Pangan
MUHAMMAD RIZAL
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
PRAKATA
Puji dan syukur penulis panjatkan ke hadirat Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Karya ilmiah ini disusun sebagai syarat untuk penyelesaian studi master di program studi Teknik Mesin Pertanian Dan Pangan, Institut Pertanian Bogor sejak bulan desember 2014-desember 2015. Judul Penelitian yang dilaksanakan adalah Desain dan Pengujian Prototipe Sistem Kontrol Mesin Sprayer Dosis Variabel untuk Aplikasi Penyemprotan Pertanian Presisi.
Terima kasih penulis ucapkan kepada Bapak Dr. Ir.I Dewa Made Subrata, M.Agr dan Bapak Dr. Ir. Radite Praeko Agus Setiawan, M.Agr selaku pembimbing yang telah banyak membimbing penulis dalam menyelesaikan karya ilmiah ini. Di samping itu, penghargaan penulis sampaikan kepada teman-teman angkatan 2013, Laboratorium Mekatronika dan Laboratorium Manufaktur yang telah membantu dalam perancangan dan pengambilan data. Ungkapan terima kasih juga disampaikan kepada orang tua, keluarga atas segala doa, kasih sayangnya dan perhatiannya.
Semoga karya ilmiah ini bermanfaat.
Bogor, April 2016
Pengujian laboratorium 17
penentuan intensitas serangan hama 18
Pengujian Lapangan 18
4 HASIL DAN PEMBAHASAN 20
Prototipe sprayer elektrik 20
Uji kinerja dan kalibrasi sensor ultrasonik SR 04 21
Kinerja PWM kontrol terhadap kecepatan motor sprayer 21
Kinerja pengaturan PWM terhadap hasil penyemprotan sprayer 23
Kinerja pengaturan PWM terhadap luas hasil semprotan sprayer 23
Hasil uji laboratorium 24
karakteristik tanaman kubis 24
Hasil pengujian lapangan terhadap kinerja penyemprotan sprayer 26
5 KESIMPULAN dan SARAN 27
Simpulan 27
Saran 28
DAFTAR PUSTAKA 28
LAMPIRAN 31
DAFTAR TABEL
1 Fungsional prototipe sprayer 13
2 Hasil uji laboratorium sprayer dengan dosis yang berbeda 24
3 Hasil pengujian lapangan 27
DAFTAR GAMBAR
1 Ransel sprayer elektrik 4
2 Nozzle tipe kerucut berlubang 4
3 Jarak penyemprotan harus optimal 5
4 Komponen sistem kontrol loop terbuka 5
5 Arduino mega 2560 6
6 Motor Driver (L293D) 6
7 Ilustrasi PWM untuk kendali kecepatan 7
8 Jarak Ukur Sensor 8
9 Perancangan Sensor Optocoupler 8
10 Konstruksi Motor DC 9
11 Solenoid Valve 9
12 Bagan alir proses penelitian 11
13 Desain prototipe sprayer pestisida 14
14 Diagram alir sistem kontrol 15
15 Skema pengendalian sistem kontrol 16
16 Mekanisme pengaplikasian prototipe mesin sprayer 16
17 Mekanisme pengujian lapangan 19
18 Prototipe sprayer yang dibuat: (a) motor pompa, (b) nozzle, (c) power
sprayer (aki), dan (d) solenoid valve. 20
19 Hasil pengujian dan kalibrasi sensor ultrasonik SR 04 21
20 Uji kecepatan motor pompa 22
21 Kalibrasi kecepatan motor pompa 22
22 Hasil pengujian kesesuaian volume semprotan 23
23 Hasil pengujian luas semprotan sprayer 24
24 Penentuan persentase serangan hama 25
25 Pengukuran tinggi dan diameter tanaman 25
26 Uji lapangan 26
DAFTAR LAMPIRAN
1 Rancangan lengkap mesin sprayer 32
2 Explode sprayer 33
3 Rancangan lengan sprayer 34
4 Rancangan motor pompa 35
5 Rancangan rangka sprayer 36
6 Rancangan bak sprayer 37
7 Rancangan rangkaian sistem kontrol pada software proteus 7 38
8 Spesifikasi komponen alat 39
10 Tabel hasil kalibrasi motor pompa 40 11 Table hasil pengujian luas semprotan sprayer 41
12 Hasil pengujian volume semprotan 41
13 Tabel rata-rata hasil pengujian laboratorium sprayer pada 10 blok
penyemprotan. 42
14 Tabel hasil pengujian laboratorium sprayer dengan dosis variabel 42
15 Tabel intensitas serangan hama 43
1
1
PENDAHULUAN
Latar Belakang
Tanaman kubis (Brassica oleracea var. capitata L.) merupakan sayuran dataran tinggi, yang banyak dibudidayakan petani di Indonesia terutama di daerah pedesaan. Kubis tergolong sayuran yang kaya vitamin seperti vitamin A 200 IU, B 20 IU dan C 120 IU yang sangat berperan bagi kesehatan. Kebutuhan terhadap sayur-sayuran semakin meningkat dengan meningkatnya jumlah penduduk. Oleh karena itu, sayur-sayuran terutama kubis perlu ditingkatkan produksinya untuk memenuhi kebutuhan tersebut. Tanaman perlu dilindungi dari serangan hama dan penyakit agar produksinya dapat ditingkatkan. Perlindungan serangan hama dan penyakit terhadap tanaman secara umum dilakukan dengan pestisida atau herbisida, namun dalam pengaplikasiannya, khususnya di Indonesia, masih dilakukan secara berlebihan tanpa pengontrolan jumlah dosis. Penggunaan pestisida secara berlebihan akan membahayakan bagi lingkungan dan kesehatan manusia, oleh karena itu perlu adanya pengendalian dan pembatasan dari penggunaan pestisida tersebut untuk mengurangi pencemaran yang diakibatkan oleh residu pestisida.
Kondisi serangan yang berbeda-beda, menyebabkan perbedaan akan kebutuhan dosis pestisida pada tiap tanaman. Oleh karena itu kebiasaan petani dalam mengatasi serangan hama dan penyakit perlu dirubah dengan cara melakukan penyemprotan pestisida hanya pada tanaman yang terjangkit. Tapi permasalahannya sekarang petani melakukan penyemprotan tanpa mengetahui distribusi serangan hama. Volume dan dosis pestisida yang seragam disemprotkan pada tanaman dengan jangkit penyakit yang berbeda sehingga menyebakan penggunaan pestisida yang berlebihan pada tanaman.
Daun tanaman kubis yang diserang L. huidobrensis memperlihatkan gejala berupa bintik-bintik putih dan adanya liang korokan larva yang mengular. Kerusakan daun kubis akibat serangan hama ini hanya berkisar 1.61-5.47% (Herlinda 2004). Tingkat kerusakan yang ditimbulkan oleh hama tersebut mecapai 60.56% di perlakuan tanpa insektisida, sementara kerusakan tanaman di perlakuan insektisida mencapai 17,25% (Kumarawati et al. 2013).
Penentuan tingkat identifikasi serangan hama pada tanaman kubis sangat diperlukan sebagai acuan dalam penyemprotan tanaman presisi. Selama ini petani melakukan pemberantasan hama pada tanaman kubis tidak melakukan perhitungan tingkat serangan hama pada tanaman sehingga proses penyemprotanya berdasarkan keinginan petani bukan sesuai kebutuhan tanaman. Adapun metode penentuan tingkat serangan hama yang dilakukan petani dengan cara pengamatan langsung tanpa melalui perhitungan tertentu. Sehingga penentuan jumlah dosis yang akan diberikan tiap tanaman tidak diketahui.
2
Rumusan Masalah
Penggunaan pestisida terhadap hama secara presisi merupakan hal yang sangat penting untuk pertumbuhan tanaman dan pengendalian hama dan penyakit, dimana penggunaan pestisida yang berlebihan atau tidak sesuai akan membahayakan lingkungan dan kehidupan manusia akibat zat kimia yg terdapat pada pestisida. Karena itu untuk proses penggunaan pestisida secara presisi dibutuhkan teknologi yang mampu mengontrol dosis pestisida pada saat penyemprotan.
Tujuan
Penelitian ini dilakukan dengan tujuan untuk :
1. Merancang dan membuat prototipe sprayer pestisida dengan dosis terprogram. 2. Melakukan pengujian kinerja sistem kontrol prototipe sprayer pestisida untuk
pertanian presisi.
Kegunaan
Hasil penelitian ini akan menjadi masukan untuk pengembangan lebih lanjut desain alat kontrol sprayer secara presisi dan dapat diproduksi oleh industri sehingga dapat digunakan untuk pertanian di Indonesia.
Manfaat Penelitian
Manfaat dari penelitian ini adalah 1) memberikan solusi dan kemudahan bagi masyarakat pertanian dalam melakukan penyemprotan hama pada tanaman, 2) dapat mengurangi penggunaan pestisida pada saat proses penyemprotan tanaman, 3) untuk mengembangkan ilmu pengetahuan dan teknologi diwilayah pertanian.
Ruang Lingkup Penelitian
3
2
TINJAUAN PUSTAKA
Perlindungan tanaman
Tanaman pertanian sering diganggu atau dirusak oleh organisme pengganggu yang secara ekonomis sangat merugikan petani. Organisme penggangu tanaman atau yang sering dikenal sebagai hama tanaman, penyakit tanaman dan gulma (tumbuhan penggangu). Organisme pengganggu tanaman/tumbuhan sering disebut OPT (Djojosumarto 2008).
Untuk menghindari kerugian karena serangan OPT, tanaman perlu dilindungi dengan cara mengendalikan OPT tersebut. OPT tidak perlu diberantas habis karena memang tidak mungkin. Dengan usaha pengendalian, populasi atau tingkat kerusakan karena OPT ditekan serendah mungkin sehingga secara ekonomis tidak merugikan (Djojosumarto 2008).
Konsekuensi lingkungan dari penggunaan insektisida sintetik untuk menghindari kerugian akibat serangan OPT adalah hama-hama telah berkembang dan menjadi tahan terhadap berbagai formulasi insektisida. Terjadi resistensi hama, resurjensi, matinya musuh-musuh alami (predator, parasit, dan patogen), dan organisme lainya, juga terjadinya pencemaran udara, tanah, dan air (Paat et al.
2012).
Penentuan tingkat kerusakan tanaman kubis menurut Sukorini (2006) adalah mengikuti ketentuan sebagai berikut:
1. Sangat berat, kerusakan >50% 2. Berat, kerusakan 30%-50% 3. Cukup berat, kerusakan 15%-29% 4. Ringan, kerusakan 1%-14% 5. Tidak ada serangan, kerusakan 0%
Prinsip dasar sistem penyemprotan sprayer elektrik
Sprayer
Sprayer elektrik terdiri dari beberapa komponen yang tidak terdapat pada power sprayer maupun manual sprayer seperti aki 12 V, pompa air tekanan 5.8 bar. Hasil perbandingan tekanan pada lubang keluaran menunjukan perbedaan tekanan yang cukup signifikan, yaitu pada sprayer manual 3 bar dan sprayer elektrik 4 bar. Perbedaan tekanan tersebut mengakibatkan adanya perbedaan debit, panjang penyemprotan dan luas penyemprotan (Rahman dan Yamin 2014).
Penyemprot ransel konvensional dengan Metode tradisional memakan waktu yang lama, kurang efektif, dan memerlukan penggunaan tangan untuk
4
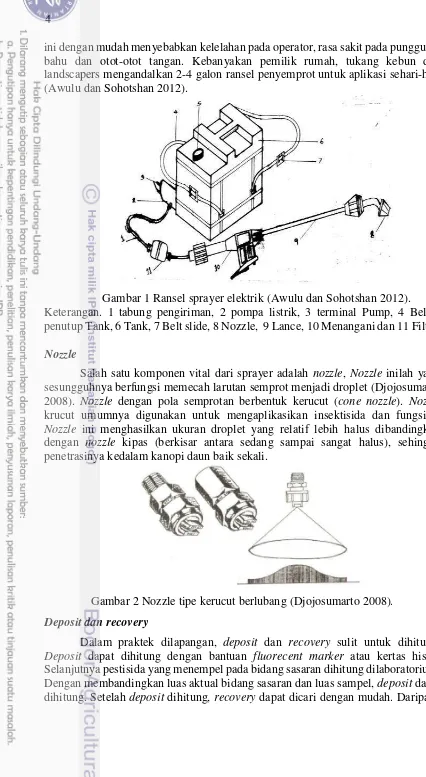
ini dengan mudah menyebabkan kelelahan pada operator, rasa sakit pada punggung, bahu dan otot-otot tangan. Kebanyakan pemilik rumah, tukang kebun dan landscapers mengandalkan 2-4 galon ransel penyemprot untuk aplikasi sehari-hari (Awulu dan Sohotshan 2012).
Gambar 1 Ransel sprayer elektrik (Awulu dan Sohotshan 2012). Keterangan. 1 tabung pengiriman, 2 pompa listrik, 3 terminal Pump, 4 Belt 5 penutup Tank, 6 Tank, 7 Belt slide, 8 Nozzle, 9 Lance, 10 Menangani dan 11 Filter. Nozzle
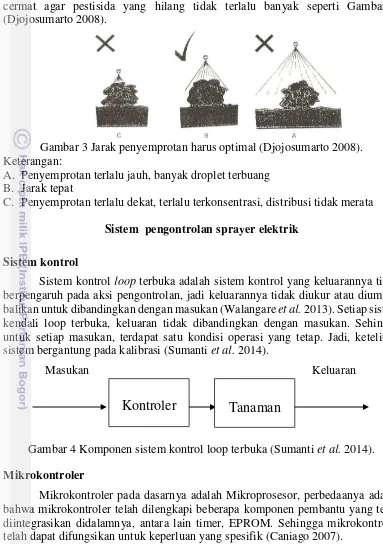
Salah satu komponen vital dari sprayer adalah nozzle, Nozzle inilah yang sesungguhnya berfungsi memecah larutan semprot menjadi droplet (Djojosumarto 2008). Nozzle dengan pola semprotan berbentuk kerucut (cone nozzle). Nozzle
krucut umumnya digunakan untuk mengaplikasikan insektisida dan fungsida.
Nozzle ini menghasilkan ukuran droplet yang relatif lebih halus dibandingkan dengan nozzle kipas (berkisar antara sedang sampai sangat halus), sehingga penetrasinya kedalam kanopi daun baik sekali.
Gambar 2 Nozzle tipe kerucut berlubang (Djojosumarto 2008). Deposit dan recovery
Dalam praktek dilapangan, deposit dan recovery sulit untuk dihitung.
5 mencoba menghitung deposit dan recovery, lebih baik jika kita menyemprot dengan cermat agar pestisida yang hilang tidak terlalu banyak seperti Gambar 3 (Djojosumarto 2008).
Gambar 3 Jarak penyemprotan harus optimal (Djojosumarto 2008). Keterangan:
A. Penyemprotan terlalu jauh, banyak droplet terbuang B. Jarak tepat
C. Penyemprotan terlalu dekat, terlalu terkonsentrasi, distribusi tidak merata Sistem pengontrolan sprayer elektrik
Sistem kontrol
Sistem kontrol loop terbuka adalah sistem kontrol yang keluarannya tidak berpengaruh pada aksi pengontrolan, jadi keluarannya tidak diukur atau diumpan balikan untuk dibandingkan dengan masukan (Walangare et al. 2013). Setiap sistem kendali loop terbuka, keluaran tidak dibandingkan dengan masukan. Sehingga untuk setiap masukan, terdapat satu kondisi operasi yang tetap. Jadi, ketelitian sistem bergantung pada kalibrasi (Sumanti et al. 2014).
Masukan Keluaran
Gambar 4 Komponen sistem kontrol loop terbuka (Sumanti et al. 2014). Mikrokontroler
Mikrokontroler pada dasarnya adalah Mikroprosesor, perbedaanya adalah bahwa mikrokontroler telah dilengkapi beberapa komponen pembantu yang telah diintegrasikan didalamnya, antara lain timer, EPROM. Sehingga mikrokontroler telah dapat difungsikan untuk keperluan yang spesifik (Caniago 2007).
Perancangan arduino mega 2560
Arduino Mega 2560 adalah papan rangkaian elektronik (electronic board)
open source yang didalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler berbasis ATMega 2560 (Audli et al. 2014). Mengendalikan motor DC digunakan rangkaian Arduino mega 2560 sebagai pengolah dan memberikan
6
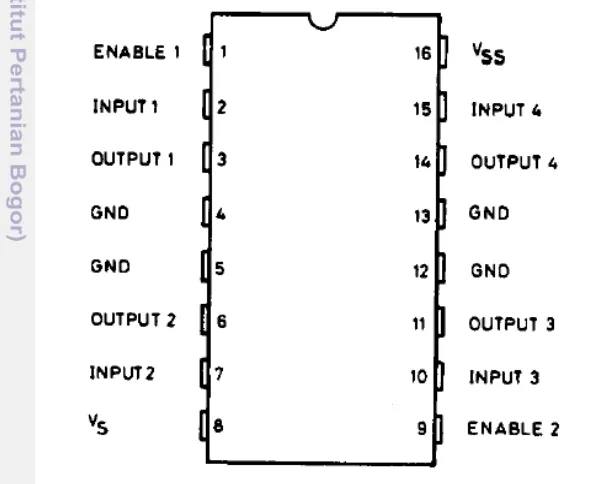
data agar motor DC bergerak. Konfigurasi kaki I/O dari Arduino mega 2560 (Siswojo 2013). ditunjukkan dalam Gambar 5.
Gambar 5 Arduino mega 2560 (Windarto 2012). Motor shild/Motor driver
Motor draiver L293D adalah monolitik, terintegrasi, tegangan tinggi, arus tinggi dan memiliki 4 channel driver. Pada dasarnya chip yang ada pada motor draiver bisa menggunakan paling banyak empat motor DC dan memberikan pasokan listrik hingga 36V. Chip L293D menggunakan H-Bridge. H-Bridge biasanya sebuah sirkuit listrik yang memungkinkan tegangan yang akan diberikan ke seluruh beban di kedua arah untuk output, misalnya motor (Kaura et al. 2013).
Gambar 6 Motor Driver (L293D) (Kaura et al. 2013).
7 Pulse Width Modulation (pwm)
Pulse Width Modulation (pwm) atau modulasi lebar pulsa, merupakan sinyal digital berupa gelombang kotak (square wave) dimana duty cycle dari gelombang kotak tersebut dapat setting sesuai dengan kebutuhan sistem (Khumaedi
et al. 2014). PWM merupakan suatu metoda untuk mengatur kecepatan perputaran motor dengan cara mengatur presentase lebar pulsa high terhadap periode dari suatu sinyal persegi dalam bentuk tegangan periodik yang diberikan ke motor sebagai sumber daya (Yohanes 2011). Pengaturan frekuensi dan duty cycle PWM yang tepat akan memberikan efisiensi daya yang lebih baik (Sujanarko 2013).
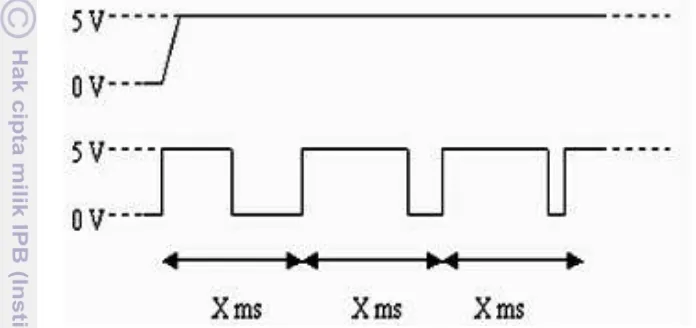
Gambar 7 Ilustrasi PWM untuk kendali kecepatan (Susilo 2010).
Dari Gambar 7 dapat dijelaskan jika dikehendaki kecepatan penuh maka diberikan 5 volt konstan, jika dikehendaki kecepatan bervariasi maka diberikan pulsa yang lebar dengan level 1 dan level 0 bervariasi. Satu periode pulsa memiliki waktu yang sama sehingga dalam contoh, kecepatan motor akan berubah dari setengah kecepatan penuh mendekati kecepatan penuh. Jadi yang dirasakan oleh transistor pengendali di dalam chip adalah tegangan rata-ratanya, dimana semakin besar duty cyclenya maka akan menaikkan tegangan rata-rata sehingga arus yang mengalir ke beban motor juga semakin meningkat dan bahkan mempengaruhi kecepatan motor DC (Susilo 2010).
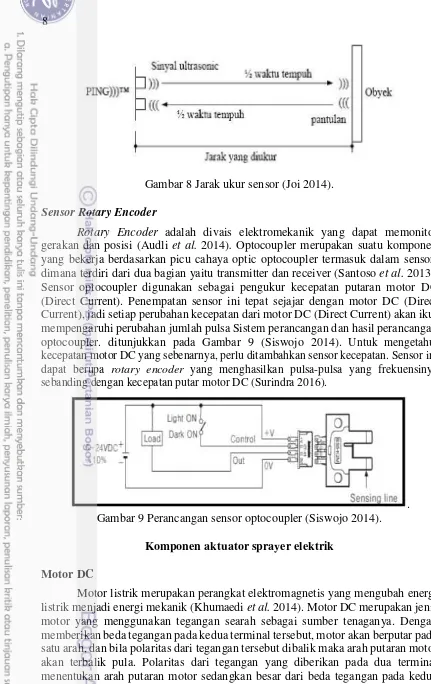
Sensor ultrasonik SR 04
8
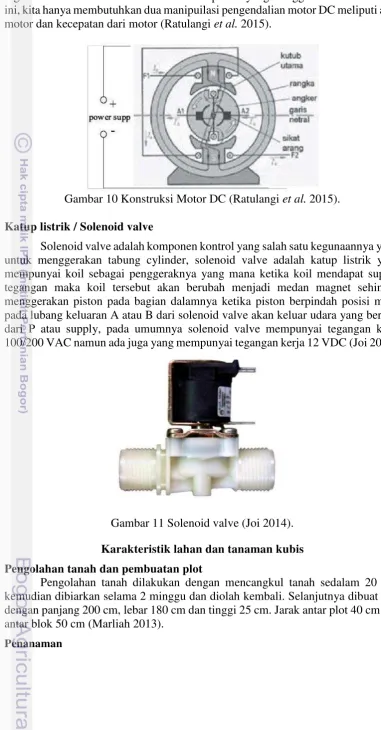
Gambar 8 Jarak ukur sensor (Joi 2014). Sensor Rotary Encoder
Rotary Encoder adalah divais elektromekanik yang dapat memonitor gerakan dan posisi (Audli et al. 2014). Optocoupler merupakan suatu komponen yang bekerja berdasarkan picu cahaya optic optocoupler termasuk dalam sensor, dimana terdiri dari dua bagian yaitu transmitter dan receiver (Santoso et al. 2013). Sensor optocoupler digunakan sebagai pengukur kecepatan putaran motor DC (Direct Current). Penempatan sensor ini tepat sejajar dengan motor DC (Direct Current), jadi setiap perubahan kecepatan dari motor DC (Direct Current) akan ikut mempengaruhi perubahan jumlah pulsa Sistem perancangan dan hasil perancangan optocoupler. ditunjukkan pada Gambar 9 (Siswojo 2014). Untuk mengetahui kecepatan motor DC yang sebenarnya, perlu ditambahkan sensor kecepatan. Sensor ini dapat berupa rotary encoder yang menghasilkan pulsa-pulsa yang frekuensinya sebanding dengan kecepatan putar motor DC (Surindra 2016).
. Gambar 9 Perancangan sensor optocoupler (Siswojo 2014).
Komponen aktuator sprayer elektrik
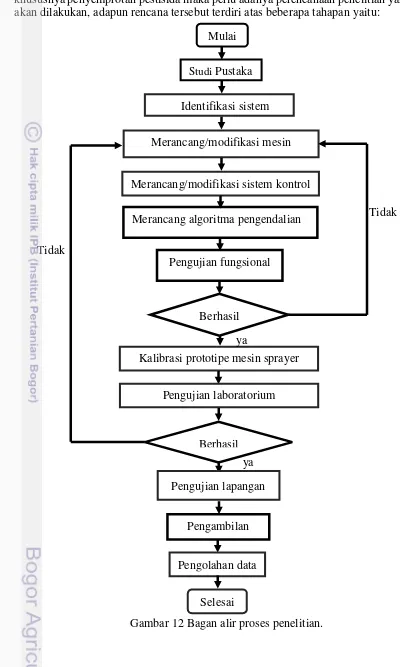
Motor DC
9 digunakan adalah motor listrik DC. Untuk aplikasi yang menggunakan motor listrik ini, kita hanya membutuhkan dua manipuilasi pengendalian motor DC meliputi arah motor dan kecepatan dari motor (Ratulangi et al. 2015).
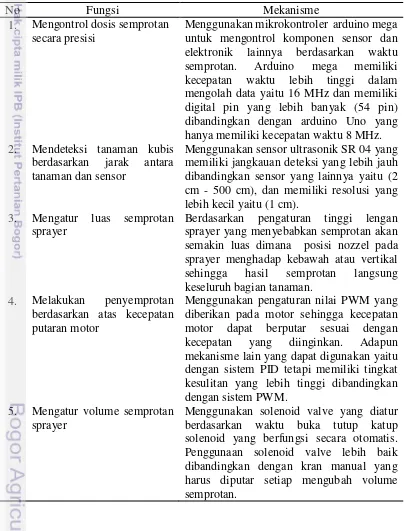
Gambar 10 Konstruksi Motor DC (Ratulangi et al. 2015). Katup listrik / Solenoid valve
Solenoid valve adalah komponen kontrol yang salah satu kegunaannya yaitu untuk menggerakan tabung cylinder, solenoid valve adalah katup listrik yang mempunyai koil sebagai penggeraknya yang mana ketika koil mendapat supply tegangan maka koil tersebut akan berubah menjadi medan magnet sehingga menggerakan piston pada bagian dalamnya ketika piston berpindah posisi maka pada lubang keluaran A atau B dari solenoid valve akan keluar udara yang berasal dari P atau supply, pada umumnya solenoid valve mempunyai tegangan kerja 100/200 VAC namun ada juga yang mempunyai tegangan kerja 12 VDC (Joi 2014).
Gambar 11 Solenoid valve (Joi 2014). Karakteristik lahan dan tanaman kubis
Pengolahan tanah dan pembuatan plot
Pengolahan tanah dilakukan dengan mencangkul tanah sedalam 20 cm, kemudian dibiarkan selama 2 minggu dan diolah kembali. Selanjutnya dibuat plot dengan panjang 200 cm, lebar 180 cm dan tinggi 25 cm. Jarak antar plot 40 cm dan antar blok 50 cm (Marliah 2013).
10
Penanaman dilakukan pada dua petak berukuran 100 m2 dan masing-masing ditanam 400 tanaman dengan jarak tanam 50 cm x 50 cm. Penanaman bibit kubis pada masing-masing petak dilakukan setelah bibit berumur 28 hari (jumlah daun 4-5 helai). Kedua petak tersebut diberikan perlakuan tanpa insektisida dan perlakuan insektisida. Jenis insektisida yang digunakan adalah Prevathon TM 50 SC yang berbahan aktif klorantraniliprol dosis 0.5-1 ml/liter air dan volume semprot 6 l/are. Penyemprotan insektisida di lapang dilakukan setelah tanaman kubis berumur 10 hari setelah tanam (hst). Penyemprotan insektisida dilakukan 3 kali dalam 1 bulan dengan interval waktu 10 hari. Pengambilan sampel tanaman dilakukan secara diagonal. Pada masing-masing garis diagonal diambil 2 titik sampel (unit sampel) dengan jarak 2 m x 2 m, sehingga pada masing-masing petak terdapat 9 unit sampel (Kumarawati 2013).
3 METODE PENELITIAN
Waktu dan Tempat
Penelitian ini dilaksanakan bulan Desember 2014 – Desember 2015. Bertempat di Laboratorium Lapangan Siswadhi Soepadjo Departemen Teknik Mesin dan Biosistem, Institut Pertanian Bogor, di laboratorium Mekatronika dan Robotika devisi Teknik Mesin dan Otomasi, Departemen Teknik Mesin dan Biosistem Fateta IPB dan Pegujian lapangan dilaksanakan di lahan Teaching Farm Sadifa Fakultas Pertanian IPB.
Alat dan Bahan
Alat yang digunakan dibedakan menjadi peralatan konstruksi untuk pembuatan prototipe, peralatan elektronika untuk pembuatan sistem kontrol, dan peralatan untuk keperluan pengujian. Peralatan konstruksi antara lain peralatan bengkel konstruksi, mesin perbengkelan dan pengerjaan logam. Peralatan untuk pembuatan alat kontrol antara lain solder, obeng, bor, dan tang potong. Peralatan untuk pengujian antara lain multimeter, tachometer tipe DT-2234C, stopwatch, pita ukur, kamera digital, dan gelas ukur/tabung ukur. Rangkaian elektronika pendukung, seperti sakelar, adaptor dan pengaman beban lebih (sekring). Peralatan untuk pembuatan desain antara lain komputer dan software solidworks 2011 untuk pembuatan desain sistem mekanik, proteus 7 profesional untuk pembuatan rangkaian mikrokontroler, dan arduino 1.0.6 untuk pembuatan program mikrokontroler.
Bahan yang digunakan untuk konstruksi mesin adalah (1) plat baja berbagai ukuran, (2) baut dan mur berbagai jenis, (3) besi poros berbagai ukuran (4) nozzel, dan (5) sprayer elektrik tipe tasco mist 16 E. Bahan yang digunakan untuk rangkaian mikrokontroler adalah (1) arduino mega 2560, (2) sensor ultrasonik SR 04, (3) motor shild L293D, (4) motor DC, (5) selenoid valve, (6) DI-smart rotary encoder
(sensor kecepatan motor), dan (7) bahan habis pakai untuk pengujian (pestisida, air, dan tanaman kubis).
11 Berdasarkan permasalahan yang akan diselesaikan dalam bidang pertanian khususnya penyemprotan pestisida maka perlu adanya perencanaan penelitian yang akan dilakukan, adapun rencana tersebut terdiri atas beberapa tahapan yaitu:
12
Berdasarkan Gambar 12, tahapan yang dilakukan dalam penelitian ini, yaitu :
1. Melakukan studi pustaka untuk mencari atau menentukan komponen-komponen dan sistem yang akan digunakan dalam menyelesaikan permasalahan yang ingin diselesaikan dalam penelitian yang dilakukan.
2. Mempersiapkan semua komponen dan peralatan yang digunakan baik peralatan utama maupun peralatan pendukung dan membuat rangkaian pendukung yang akan digunakan.
3. Merancang prototipe mesin sprayer dengan menggunakan beberapa komponen peralatan yang terdiri atas rancangan rangka dudukan untuk sprayer elektrik yang mengikuti panjang dan lebar dari sprayer elektrik, merancang dudukan nozzle mengikuti jarak antara dua tanaman kubis dan berdasarkan tinggi tanaman agar pada saat penyemprotan sesuai dengan luas kanopi tanaman. 4. Merancang sistem kontrol dengan pembuatan program mikrokontroler yang
meliputi pemilihan bahasa pemrograman, kompilasi dan proses download program ke chip mikrokontroler. Bahasa pemrograman yang digunakan adalah bahasa C. Kode-kode bahasa C ditulis dalam sebuah editor dalam program Arduino IDE 1.0.6. Menguji program yang telah dibuat dengan menggunakan software proteus 7 profesional. Pemrograman dilakukan sebanyak dua kali, dimana pada program pertama untuk mengontrol solenoid valve dan motor listrik dari sprayer. Program kedua dibuat untuk sensor yang digunakan baik itu sensor kecepatan motor dan sensor untuk deteksi tanaman. Pengujian program yang telah dibuat disimulasikan pada software Proteus 7 Profesional.
5. Merancang algoritma pengendalian dengan menggunakan sistem PWM (pulse width modulation) yang berfungsi untuk mengendalikan motor sprayer agar pada saat penyemprotan sesuai dengan dosis yang dibutuhkan tanaman.
6. Pengujian fungsional dilakukan untuk mengetahui hasil dari pemrograman yang telah dibuat yang berdasarkan atas dosis yang telah digunakan. Baik dari kontrol motor listrik pada sprayer maupun fungsi dari pembacaan sensor.
7. Kalibrasi prototipe mesin dilakukan untuk mengetahui pola keluaran dari prototipe mesin terhadap pestisida yang digunakan, selanjutnya hasil kalibrasi ini menjadi masukan untuk mikrokontroler dalam mengontrol laju keluaran prototipe mesin sprayer dalam aplikasi di lapangan. Selain itu kalibrasi juga dilakukan untuk menguji ketahanan alat, dalam hal ini konsistensi keluaran prototipe mesin sprayer setelah beberapa kali penggunaan.
8. Pengujian laboratorium prototipe mesin sprayer dilakukan dengan cara mengaplikasikan protipe sistem kontrol mesin sprayer melalui pengukuran dari hasil penyemprotan, yang berdasarkan atas luas penyemprotan yang dilakukan dengan menggunakan kertas isap, Pengukuran debit hasil penyemprotan, dan kesesuaian penggunaan dosis pestisida yang diberikan. Untuk pengukuran debit dapat dilihat pada wadah pengukuran yang digunakan jika tidak sesuai maka harus dilakukan pengecekan kembali pada hasil pengujian program terhadap komponen yang digunakan.
13 10.Pengambilan data berdasarkan atas hasil pengujian prototipe mesin sprayer yang telah dilakukan baik itu pengujian laboratorium ataupun pengujian lapangan.
11.Pengolahan data dilakukan untuk menganalisa kinerja dari sistem yang telah dibuat.
Pendekatan Rancangan
Rancangan fungsional
Secara keseluruhan konsep pengembangan sistem kontrol pada prototipe mesin sprayer pertanian presisi memiliki fungsi sebagai berikut:
Tabel 1 Fungsional prototipe sprayer
No Fungsi Mekanisme
1. Mengontrol dosis semprotan secara presisi
Menggunakan mikrokontroler arduino mega untuk mengontrol komponen sensor dan elektronik lainnya berdasarkan waktu semprotan. Arduino mega memiliki kecepatan waktu lebih tinggi dalam mengolah data yaitu 16 MHz dan memiliki digital pin yang lebih banyak (54 pin) dibandingkan dengan arduino Uno yang hanya memiliki kecepatan waktu 8 MHz. 2. Mendeteksi tanaman kubis
berdasarkan jarak antara tanaman dan sensor
Menggunakan sensor ultrasonik SR 04 yang memiliki jangkauan deteksi yang lebih jauh dibandingkan sensor yang lainnya yaitu (2 cm - 500 cm), dan memiliki resolusi yang lebih kecil yaitu (1 cm).
3. Mengatur luas semprotan sprayer
Berdasarkan pengaturan tinggi lengan sprayer yang menyebabkan semprotan akan semakin luas dimana posisi nozzel pada sprayer menghadap kebawah atau vertikal sehingga hasil semprotan langsung keseluruh bagian tanaman.
4. Melakukan penyemprotan berdasarkan atas kecepatan putaran motor
Menggunakan pengaturan nilai PWM yang diberikan pada motor sehingga kecepatan motor dapat berputar sesuai dengan kecepatan yang diinginkan. Adapun mekanisme lain yang dapat digunakan yaitu dengan sistem PID tetapi memiliki tingkat kesulitan yang lebih tinggi dibandingkan dengan sistem PWM.
5. Mengatur volume semprotan sprayer
14
Rancangan struktural
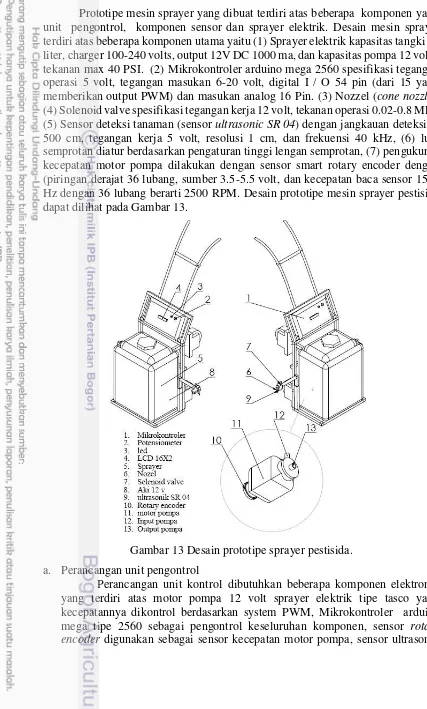
Prototipe mesin sprayer yang dibuat terdiri atas beberapa komponen yaitu unit pengontrol, komponen sensor dan sprayer elektrik. Desain mesin sprayer terdiri atas beberapa komponen utama yaitu (1) Sprayer elektrik kapasitas tangki 16 liter, charger 100-240 volts, output 12V DC 1000 ma, dan kapasitas pompa 12 volts, tekanan max 40 PSI. (2) Mikrokontroler arduino mega 2560 spesifikasi tegangan operasi 5 volt, tegangan masukan 6-20 volt, digital I / O 54 pin (dari 15 yang memberikan output PWM) dan masukan analog 16 Pin. (3) Nozzel (cone nozzle). (4) Solenoid valve spesifikasi tegangan kerja 12 volt, tekanan operasi 0.02-0.8 MPa. (5) Sensor deteksi tanaman (sensor ultrasonic SR 04) dengan jangkauan deteksi 2-500 cm, tegangan kerja 5 volt, resolusi 1 cm, dan frekuensi 40 kHz, (6) luas semprotan diatur berdasarkan pengaturan tinggi lengan semprotan, (7) pengukuran kecepatan motor pompa dilakukan dengan sensor smart rotary encoder dengan (piringan derajat 36 lubang, sumber 3.5-5.5 volt, dan kecepatan baca sensor 1500 Hz dengan 36 lubang berarti 2500 RPM. Desain prototipe mesin sprayer pestisida dapat dilihat pada Gambar 13.
Gambar 13 Desain prototipe sprayer pestisida. a. Perancangan unit pengontrol
15 sebagai pendeteksi tanaman, dan selenoid valve untuk mengontrol lama semprotan.
b. Perancangan unit pengangkut sprayer
Panjang prototipe mesin sprayer terdiri atas panjang dudukan sprayer 45 cm yang berdasarkan ukuran panjang sprayer tipe tasco, panjang pengendali 60 cm dengan tujuan untuk mempermudah pengendalian alat pada saat pengaplikasian dilahan dan jarak pegangan alat 35 cm. Maka panjang keseluruhan alat yang dibuat yaitu 140 cm.
c. Perancangan bagian penyemprotan
Bagian penyemprotan terdiri atas jarak antara roda 40 cm berdasarkan lebar antar bedengan, jarak antara nozzel 140 cm, tinggi nozzel 25 cm dari sisi atas tanaman dengan tujuan pada saat penyemprotan sesuai dengan plot tanaman dengan asumsi tinggi lahan dan tanaman sama. Nozzel dengan tipe (cone nozzle) sebanyak 2 buah yang dipasang pada kedua sisi alat.
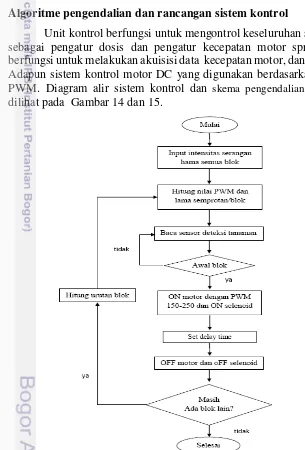
Algoritme pengendalian dan rancangan sistem kontrol
Unit kontrol berfungsi untuk mengontrol keseluruhan sistem, salah satunya sebagai pengatur dosis dan pengatur kecepatan motor sprayer. Unit ini juga berfungsi untuk melakukan akuisisi data kecepatan motor, dan keberadaan tanaman. Adapun sistem kontrol motor DC yang digunakan berdasarkan atas pengontrolan PWM. Diagram alir sistem kontrol dan skema pengendalian sistem kontrol dapat dilihat pada Gambar 14 dan 15.
16
Gambar 15 Skema pengendalian sistem kontrol
Tahapan pengoperasian alat
Prototipe mesin sprayer yang digunakan pada penelitian ini adalah berupa rancangan desain prototipe sprayer pestisida (Gambar 13). Adapun urutan tahapan pengoperasian mesin sprayer ini adalah (1) menyalakan mikrokontroler dan sprayer, (2) menginput intensitas serangan hama, dosis semprotan dan urutan area semprotan pada mikrokontroler arduino mega 2560, (3) mengoperasikan prototipe sprayer pada lahan dan mendeteksi tanaman dengan menggunakan sensor
ultrasonic SR 04 berdasarkan urutan area tanaman yang diinput, (4) Motor listrik pada sprayer secara otomatis berfungsi untuk memberikan semprotan yang berdasarkan PWM kecepatan putaran motor, (5) solenoid valve secara otomatis berfungsi mengatur lamanya penyemprotan, (6) Nozzel (cone nozzle) digunakan untuk menghasilkan memberikan semprotan dalam bentuk butiran sesuai dengan plot tanaman. Adapun perubahan dosis semprotan sprayer dapat diatur berdasarkan nilai PWM dan lama semprotan yang digunakan pada motor pompa dan solenoid valve prototipe sprayer.
17 Prosedur Pengukuran dan Pengujian
Pengujian fungsional kinerja kontrol
Uji fungsional dilakukan pada sistem kontrol komponen prototipe mesin sprayer untuk mengetahui dan memastikan bahwa setiap bagian dapat berfungsi dengan baik. Uji fungsional tersebut meliputi (1) uji kendali kecepatan motor, (2) uji pengukuran jarak sensor ultrasonik, (3) uji kalibrasi alat ukur, dan (4) uji kendali solenoid valve saat penyemprotan.
Pengujian laboratorium
Pengujian fungsional dan kalibrasi alat ukur dilakukan di laboratorium dengan mengkalibrasi terlebih dahulu sensor penghitung putaran atau rotary encoder dengan alat ukur tacometer sebelum digunakan untuk pengukuran dan pengujian. Selain putaran motor, alat pengukur jarak (sensor ultrasonik) juga dikalibrasi menggunakan alat ukur yang sudah terstandar. Adapun uji kalibrasi yaitu:
1. Pengujian dan pengukuran luas areal penyemprotan dilakukan dengan cara melakukan penyemprotan pada 5 kertas isap dengan tinggi nozel (30 cm, 35 cm, dan 40 cm) pada 4 nilai PWM yang berbeda yaitu (100, 150, 200 dan 250). Hal ini dilakukan dengan tujuan untuk menyesuaikan hasil penyemprotan dengan luas kanopi tanaman. Dengan menggunakan persamaan 1 yaitu:
A = π r2 (1)
Keterangan
A = luas lingkaran (cm2)
Π = 3.14
r = jari-jari lingkaran
2. Pengujian, pengukuran dan kalibrasi sensor deteksi tanaman (Ultrasonic SR 04 )dilakukan pengujian dengan menggunakan 5 jarak yang ditentukan yaitu (10 cm, 20 cm, 30 cm, 40 cm, dan 50 cm) dengan menggunakan pita ukur. Hal ini dilakukan dengan tujuan menyesuaikan pembacaan jarak pada sensor dengan jarak yang sebenarnya pada meteran agar pada saat pengaplikasian pada tanaman sesuai dengan jarak tanaman kubis dimana proses pengukuranya berdasarkan gelombang yang dipancarkan dari sensor.
3. Pengujian kalibrasi kecepatan motor dilakukan dengan cara menginput 4 nilai PWM yang sudah ditentukan yaitu (100, 150, 200 dan 250) pada mikrokontroler arduino mega dengan mengukur rpm kecepatan motor dengan tachometer tipe DT-2234C dan mengukur kecepatan putaran motor dengan sensor rotary encoder. Hal ini dilakukan dengan tujuan untuk mengetahui penggunaan PWM, kecepatan motor, dan membandingkan perbedaan hasil pengukuran kecepatan putaran motor antara tachometer dan sensor rotary encoder.
18
yaitu (1-10 detik). Kemudian menghitung debit hasil penyemprotan berdasarkan waktu yang digunakan dengan persamaan 2.
Q =Vt (2)
Keterangan: Q = debit (ml/s) V = volume (ml) t = waktu (s)
5. Pengujian dan pengukuran penyemprotan prototipe sprayer dengan dosis yang berbeda dilakukan dengan cara menyemprotkan sprayer dengan 3 nilai PWM yang suda ditentukan yaitu (150, 200 dan 250) dengan waktu yang sama yaitu 20 detik tiap plot penyemprotan. Mengukur waktu dan volume hasil semprotan berdasarkan 3 nilai PWM yang digunakan. Menghitung debit semprotan berdasarkan waktu dan volume hasil semprotan yang dilakukan.
Penentuan intensitas serangan hama
Identifikasi serangan hama pada tanaman berdasarkan jumlah tititk serangan dengan metode pengamatan langsung dilakukan dengan beberapa tahap yaitu:
1. Menentukan objek tanaman yang terkena hama, lalu mengukur tinggi dan diameter tanaman.
2. Mengambil gambar tanaman tersebut.
3. Menentukan jumlah titik jangkit hama pada tanaman berdasarkan foto yang suda diambil dengan aplikasi gambar paint.
4. Menghitung persentase serangan hama berdasarkan jumlah grid yang sudah ditentukan dengan titik jangkit hama pada tanaman dengan persamaan 3.
H =(DT)× 100% (3)
Keterangan:
H = Serangan hama (%)
T = jumlah grid yang terdeteksi D = jumlah grid yang ditentukan Pengujian lapangan
Pengujian lapangan dilakukan dengan beberapa tahap yaitu:
1. Menyiapkan modifikasi protipe mesin sprayer yang telah dibuat dan diuji di laboratorium.
2. Menginput hasil identifikasi serangan hama, dosis semprotan, dan urutan plot semprotan pada mikrokontroler.
19 (penyemprotan banyak dengan debit semprotan 10 ml/detik per plot tanaman dengan intensitas serangan hama 11-20%). Menghitung kecepatan maju operator pada saat penyemprotan dengan persamaan 4.
v =st (4)
Keterangan: v = kecepatan (m/s) s = jarak (m) t = waktu (detik)
4. Melakukan pengujian lama penyemprotan berdasarkan waktu on solenoid valve dan nilai PWM motor pompa sesuai dengan Mekanisme pengujian lapangan pada Gambar 17. Menghitung persentase error debit serta lama semprotan pada tanaman dengan persamaan 5.
Error =P-RP ×100% 5
Keterangan:
P = Perintah mikrokontroler (detik) R = Nilai hasil pengukuran (detik)
Gambar 17 Mekanisme pengujian lapangan.
Keterangan:
8. Jarak antara bedengan (40 cm)
9. Jarak tanaman (50 cm x 50 cm)
20
HASIL DAN PEMBAHASAN
Prototipe sprayer elektrik
Hasil pembuatan prototipe sprayer elektrik dengan sistem kontrol terdiri atas 4 bagian utama sprayer yaitu box kontrol digunakan untuk mengontrol sprayer, yang didalamnya terdapat rangkaian mikrokontroler arduino mega 2560, draiver motor L293D, sd card, lcd 16 x 2, potensiometer, dan led, dengan dimensi box yaitu lebar 18 cm dan panjang 35 cm. Alat pengangkut sprayer menggunakan 3 roda dengan dimensi rancangan yaitu lebar rangka 30 cm, panjang rangka 45 cm, tinggi rangka sprayer 56 cm, dan panjang alat kendali 60 cm. Sprayer elektrik digunakan sebagai penampung pestisida memiliki kapasitas tampungan 16 liter dengan motor pompa dan power sprayer 12 volt. Dimensi sprayer yaitu lebar 30 cm, panjang 40 cm dan tinggi 56 cm. Lengan penyemprot terdiri atas 2 solenoid valve (kran elektrik) dan 2 nozzel (tipe cone nozzle) dengan dimensi lengan penyemprot yaitu panjang 20 cm dan tinggi 30 cm. hasil pembuatan prototipe sprayer dapat dilihat pada Gambar 18.
(a) (b) (c) (d)
21 Prototipe sprayer yang dibuat terdiri atas 2 kombinasi sistem kontrol yaitu sistem kontrol motor pompa berdasarkan pengaturan kecepatan putaran motor dengan sistem PWM dan sistem kontrol solenoid valve yang berdasarkan pengaturan buka tutup katub solenoid atau disebut juga sistem on/off. Adapun sistem deteksi tanaman dilakukan berdasarkan jarak sensor ultrasonik dengan tanaman. Berdasarkan pengukuran volume semprotan diperoleh Kapasistas semprotan prototipe sprayer yang dibuat sebesar 220 ml/menit atau sekitar 13.2 l/jam.
Uji kinerja dan kalibrasi sensor ultrasonic SR 04
Pengkalibrasian sensor ultrasonic SR 04 diperoleh hasil pembacaan yang berbeda dari jarak yang sesungguhnya yaitu ( 10 cm, 20 cm, 30 cm, 40 cm,dan 50 cm) dengan rata-rata hasil pembacaan sensor yaitu (9 cm, 19 cm, 29 cm, 39 cm, dan 49 cm), dengan perbedaan pengukuran sebanyak 1 cm. adapun perbedaan pengukuran jarak disebabkan oleh perubahan sudut sensor pada saat pengaplikasian sehingga hasil pembacaan jarak sensor yang berdasarkan gelombang berbeda dengan jarak yang sebenarnya. Perbedaan jarak hasil pengujian dengan jarak hasil perhitungan dapat disebabkan oleh adanya noise pada saat pengujian (Prawiroredjo dan Asteria 2013). Hal ini sesuai spesifikasi sensor ultrasonic SR 04 yang tercantum dalam (data sheet ultrasonic SR 04) yaitu memiliki resolusi sebesar 1 cm. Hasil pengujian dapat dilihat pada Gambar 19. HC-SR 04 merupakan sensor jarak yang memanfaatkan gelombang suara ultrasonik dalam proses pengukuran jarak suatu objek (Rismawan et al. 2015). Sensor jarak adalah sebuah sensor yang digunakan untuk mengukur jarak objek tertentu dan membaca posisi benda (Santoso et al.
2013; Rismawan et al. 2015).
Gambar 19 Hasil pengujian dan kalibrasi sensor ultrasonic SR 04
Kinerja PWM kontrol terhadap kecepatan motor sprayer
22
tekanan pada motor sprayer yang menyebabkan menurunya kecepatan putaran motor pada saat pengujian. Hal ini sesuai dengan pernyataan bahwa motor berputar pada PWM 100 - 255 mengalami perubahan kecepatan tidak begitu besar (Alghoffary 2014). Hasil uji kecepatan motor pompa dapat dilihat pada Gambar 20.
Gambar 20 Uji kecepatan motor pompa.
Pengujian kalibrasi alat ukur kecepatan putaran motor dengan perbandingan alat ukur antara tacometer dengan sensor rotary encoder diperoleh perbedaan hasil pengukuran kecepatan putaran motor pompa pada PWM 100,150, 200, dan 250 sebesar 3 rpm, 4 rpm, 7 rpm, dan 17 rpm. Berdasarkan hasil pengujian tacometer
dan sensor rotary encoder diperoleh perbedaan hasil pengukuran yang signifikan pada PWM 250 yaitu 592 rpm dan 575 rpm dengan perbedaan pengukuran sebesar 17 rpm. Perbedaan pengukuran kecepatan putaran motor pompa dipengaruhi oleh putaran motor yang sangat cepat sehingga lubang pada ring sensor rotary encoder
tidak terbaca secara keseluruhan sehingga menyebabkan pengukuran sensor tidak maksimal. hasil pengujian kalibrasi kecepatan motor dapat dilihat (Gambar 21). Sensor optocoupler digunakan sebagai pengukur kecepatan putaran motor DC (Direct Current). Penempatan sensor ini tepat sejajar dengan motor DC (Direct Current), jadi setiap perubahan kecepatan dari motor DC (Direct Current) akan ikut mempengaruhi perubahan jumlah pulsa dan kecepatan putaran motor (Siswojo 2014).
23 Kinerja pengaturan PWM terhadap hasil penyemprotan sprayer
Berdasarkan hasil pengujian kinerja penyemprotan sprayer dimana kedua nozzel dalam keadaan terbuka/on dengan pengaturan nilai PWM, diperoleh hasil pengujian yaitu pada PWM 100 rata volume semprotan 31 ml, PWM 150 rata-rata volume semprotan 39.8 ml, PWM 200 rata-rata-rata-rata volume semprotan 42.4 ml, PWM 250 diperoleh rata-rata volume 49.8 ml, dengan lama semprotan rata-rata 6 detik. Hasil penyemprotan dipengaruhi oleh nilai PWM dan lama penyemprotan yang digunakan dengan kecepatan motor sprayer yang berbeda dimana semakin tinggi nilai PWM yang digunakan dan semakin lama waktu yang dibutuhkan pada saat penyemprotan akan menghasilkan volume semprotan yang semakin banyak. Berdasarkan hasil pengujian (Gambar 22), maka dapat ditentukan nilai input PWM dan lama semprotan untuk mencapai hasil semprotan yang optimal pada tanaman. Penentuan volume laju alir carrier yaitu ditentukan oleh pergerakan pompa satu berdasarkan kecepatan dan waktu (Mulyono et al. 2013).
Gambar 22 Hasil pengujian kesesuaian volume semprotan. Kinerja pengaturan PWM terhadap luas hasil semprotan sprayer
24
Gambar 23 Hasil pengujian luas semprotan sprayer. Hasil uji laboratorium
Berdasarkan hasil pengujian laboratorium sprayer dosis variabel pada perlakuan PWM 150, 200 dan 250, parameter pengamatan pengujian yaitu lama semprotan, volume semprotan dan debit semprotan. Diperoleh selisi hasil pengukuran antara perintah yang diberikan dengan hasil real pada PWM 150, 200, dan 250 yaitu rata-rata waktu semprotan 2 detik, volume 1 ml. debit rata-rata 0.8 ml/s, 0.9 ml/s, dan 0.9 ml/s selama 22 detik. Adapun perbedaan pengukuran disebabkan oleh ketidak stabilan kecepatan putaran motor pompa dan perbedaan PWM kecepatan motor yang diberikan. Pengaturan kecepatan pengendalian motor DC ditentukan melalui nilai yang diberikan pada output PWM dengan kondisi kecepatan maksimum pada nilai 255 dan kecepatan minimum pada 0 (Putra et al.
2014). Adapun hasil pengujian laboratorium dapat dilihat pada Tabel 2. Table 2 Hasil uji laboratorium sprayer dengan dosis yang berbeda.
PWM Tacometer
(P: Perintah) dan (R: Realisasi/pengukuran).
Karakteristik tanaman kubis
25 hama tersebut maka dapat ditentukan volume dan lama semprotan yang akan digunakan yaitu 200 ml dengan lama semprotan 20 detik/ plot tanaman untuk persentasi serangan hama dengan skala 1-10 % dan 500 ml dengan lama semprotan 60 detik/plot tanaman untuk persentasi serangan hama dengan skala 11-20%. Penentuan identifikasi serangan hama yang dilakukan sesuai dengan pernyataan bahwa tingkat kerusakan tanaman kubis menurut Sukorini (2006) adalah mengikuti ketentuan sebagai berikut: Sangat berat, kerusakan >50%, Berat, kerusakan 30%-50%, Cukup berat, kerusakan 15%-29%, Ringan, kerusakan 1%-14%, dan Tidak ada serangan, kerusakan 0%. Hal penentuan persentase serangan hama ini dapat dilihat pada Gambar 24.
(a) (b)
Gambar 24 Penentuan persentase serangan hama (a) 15.5 % dan (b) 8.1 %. Pengukuran tinggi dan diameter tanaman yang dilakukan dilahan diperoleh rata-rata tinggi 42 cm, dan diameter rata-rata 30 cm dan 45 cm. data tinggi dan diameter tanaman yang diperoleh digunakan sebagai pengaturan tinggi nozzle agar pada saat pengaplikasian dilapangan luasan hasil semprotan sesuai dengan yang diinginkan. Pengukuran tinggi dan diameter tanaman dapat dilihat pada Gambar 25.
(a) (b)
Gambar 25 (a) pengukuran tinggi dan (b) diameter tanaman
26
Hasil pengujian lapangan terhadap kinerja penyemprotan sprayer
Berdasarkan hasil pengujian lapangan dengan parameter pengamatan waktu, volume dan debit semprotan dengan perlakuan PWM 150 dan 250, volume semprotan yang digunakan 200 ml/plot tanaman dan 500 ml/plot tanaman, dan lama semprotan 20 dan 60 detik/plot tanaman. Diperoleh hasil pengujian yaitu rata-rata waktu semprotan 64.3 detik dengan debit rata-rata 6.76 ml/detik dan 23.2 detik dengan debit 5.69 ml/detik. Perbandingan volume semprotan antara prediksi dan aktual berdasarkan perhitungan diperoleh akurasi sebesar 66 % untuk volume 200 ml dan 87 % untuk volume 500 ml. Hasil pengujian lapangan dapat dilihat pada Gambar 26 dan Tabel 3. Adapun yang mempengaruhi ketidak kesesuaian semprotan antara perintah dan aktual yaitu jalur lintasan sprayer yang sempit, kecepatan jalan operator tidak terkontrol dan kecepatan putaran motor pompa yang tidak stabil.
27 Table 3 Rata-rata hasil pengujian lapangan
PWM Waktu Volume Debit
P (s) R (s) P (ml) R (ml) P (ml/s) R (ml/s)
150 20 23 200 132 10 5.69
250 60 64 500 435 8.3 6.76
Keterangan:
1. Waktu (P: Perintah) dan (R: Realisasi/pengukuran) 2. Debit (P: Perintah) dan (R: Realisasi/perhitungan). 3. Volume (P: Perintah) dan (R: Realisasi/perhitungan).
Akurasi hasil perintah yang diberikan pada mikrokontroler dapat diketahui dengan melakukan validasi, menghitung nilai error dan tingkat ketelitianuntuk waktu dan volume semprotan yang digunakan pada mikrokontroler terhadap hasil real pengukuran dan perhitungan di lapangan. Adapun rata-rata nilai error pada pengujian lapangan untuk waktu 20 detik sebesar 16 %, 60 detik sebesar 7 % dan volume semprotan 200 ml sebesar 34 %, 500 ml sebesar 13 %. Tingginya nilai error pada saat pengujian dilapangan disebabkan oleh pengiriman data PWM kesemua modul kendali yang harus berurutan sesuai dengan urutan pada program sehingga penggunaan perintah waktu dan debit yang digunakan pada mikrokontroler berbeda dengan hasil pengukuran. Hal ini sesuai pernyataan bahwa data referensi dikirimkan secara berkala ke semua modul kendali aktuator sehingga membutuhkan tambahan waktu untuk sampai pada pengoperasian aktuator. Pengiriman data tersebut dilakukan dengan metode PWM (Saputra et al. 2011).
5 KESIMPULAN DAN SARAN
Kesimpulan
1. Pengembangan prototipe sprayer elektrik dengan dua alur penyemprotan dalam satu lintasan dapat diaplikasikan sesuai dengan kebutuhan tanaman.
2. Uji laboratorium menunjukan bahwa untuk mencapai volume semprotan yang sesuai tingkat serangan hama/penyakit yaitu 10 ml/tanaman-70 ml/tanaman dapat dicapai dengan waktu semprotan 2 detik, 4 detik, 6 detik, 8 detik, dan 10 detik. PWM 100-250 dan kecepatan motor 217-592 rpm.
3. Rata-rata serangan hama pada tiap plot tanaman sebanyak 8.1 % dan 15.5% dengan jumlah total tanaman 120, satu plot tanaman terdiri dari 10 tanaman. 4. Hasil pengujian lapangan pada 120 tanaman menggunakan dosis 200 ml/plot
tanaman selama 20 detik (perintah) pada intensitas serangan hama 8.1 %, dan dosis 500 ml/plot tanaman selama 60 detik (perintah) pada intensitas serangan hama 15.5 %, memperoleh hasil debit semprotan rata-rata 5.69 ml/detik dan 6.76 ml/detik.
5. Rata-rata kecepatan yang digunakan untuk melakukan penyemprotan lapangan pada dosis 200 ml/plot tanaman adalah 0.43 m/s dengan lama semprotan 23.2 detik dan PWM 150, sedangkan penyemprotan pada 500 ml/plot tanaman adalah 0.16 m/s dengan lama semprotan 64.3 detik, dan PWM 250.
28
Saran
Pengujian prototipe sprayer elektrik mungkin dapat dilakukan pada tanaman yang berbeda dengan metode pengontrolan motor yang berbeda pula untuk menghindari terjadinya ketidak stabilan putaran motor sprayer pada saat penyemprotan agar volume hasil semprotan sesuai dengan yang ditentukan pada mikrokontroler.
DAFTAR PUSTAKA
Alghoffary R. 2014. Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID. Jurnal Mahasiswa TEUB 1(2).
Audli R, Sulistiyanti SR, Trisanto A. 2014. Rancang Bangun Alat Ukur Portable 9 Titik Kecepatan Aliran Sungai (Open Channel) Nirkabel Berbasis PC.
Electrician 8(2):68-81.
Awulu J, Sohotshan P. 2012. Evaluation of a Developed Electrically Operated Knapsack Sprayer. International Journal of Science and Technology 2(11). Caniago ZB. 2007. Aplikasi Mikrokontroler untuk Sistem Perparkiran. tes jurnal
3(1):200-203.
Djojosumarto P. 2008. Teknik Aplikasi Pestisida Pertanian. Kanisius: Yogyakarta. Herlinda S. 2004. Jenis Tumbuhan inang, serta populasi dan kerusakan oleh pengorok daun, Liriomyza huidobrensis (Blanchard) pada tanaman Kubis (Brassica oleracea L.). Jurnal Tanaman Tropika Vol 7(No 1):59-68. Joi I, Anggraini T. 2014. Aplikasi Pengisian Bak Air dan Kran Otomatis dengan
Mikrokontroler. Jurnal Ilmiah Elektron. 5(1):43-52.
Kaura HK, Honrao V, Patil S, Shetty P. 2013. Gesture Controlled Robot using Image Processing. International Journal of Advanced Research in Artificial Intelligence 2(5).
Khumaedi A, Soedjarwanto N, Trisanto A. 2014. Otomatisasi Pengereman Motor DC Secara Elektris Sebagai Referensi Sistem Keamanan Mobil Listrik.
Electrician 8(1):31-36.
Kumarawati NPN, Supartha IW, Yuliadhi KA. 2013. Struktur Komunitas dan Serangan Hama-Hama Penting Tanaman Kubis (Brassica oleracea L.). E-Jurnal Agroekoteknologi Tropika (Journal of Tropical Agroecotechnology)
2(4).
Marliah A. 2013. Pengaruh Varietas dan Konsentrasi Pupuk Majemuk Terhadap Pertumbuhan dan Hasil Tanaman Kubis Bunga (Brassica oleracea L.).
Jurnal Floratek 8(2):118-126.
Mulyono T, Asnawati A, Faruq U. 2013. Design of Multi Syringe Pump for Flow System Analysis. Jurnal Ilmu Dasar 14(1):17-21.
Paat FJ, Pelealu J, Manueke J. 2012. Produksi Kubis dan Persentase Serangan Crocidolomia pavonana pada beberapa Pola Tanaman Kubis. EUGENIA
29 Patiung FT, Lumenta AS, Sompie SR, Sugiarso BA. 2013. Rancang Bangun Robot Beroda dengan Pengendali Suara. Jurnal Teknik Elektro dan Komputer UNSRAT 2(4):48-52.
Putra MA, Suprapto BY, Kurniasari P. 2014. Pengendali Laju Kecepatan Dan Sudut Steering Pada Mobile Robot Dengan Menggunakan Accelerometer Pada Smartphone Android. Jurnal Mikrotiga. Vol.1, No.2 :19-24.
Rahman MN, Yamin M. 2014. Modifikasi Nosel pada Sistem Penyemprotan untuk Pengendalian Gulma Menggunakan Sprayer Gendong Elektrik. Jurnal Keteknikan Pertanian 2(1).
Ratulangi AD, Sengkey R, Lumenta AS. 2015. Pengendali Gerbang Berbasis Android. Jurnal Teknik Elektro dan Komputer UNSRAT 4(3):18-27. Rismawan T, Permana A, Triyanto D. 2015. Rancang Bangun Sistem Monitoring
Volume dan Pengisian Air Menggunakan Sensor Ultrasonik Berbasis Mikrokontroler AVR ATMEGA 8. Jurnal Coding Sistem Komputer Universitas Tanjungpura. 3(2): 76-87.
Rukmana, R. 1994. Bertanam Kubis. Kanisius. Yogyakarta.
Santoso AB, Martinus, Sugiyanto. 2013. Pembuatan Otomasi Pengaturan Kereta Api, Pengereman, dan Palang Pintu pada Rel Kereta Api Mainan Berbasis Mikrokontroler. Jurnal FEMA 1(1).
Saputra RP, Adriansyah R, Mirdanies M, Santoso A, Nugraha AS, Muqorrobin A, Saputra HM, Susanti V, Rijanto E. 2011. Perancangan dan pengujian awal kendali motor DC brushless untuk independent 4 wheel drive platform robot rev11. Mechatronics: Electr. Power, Veh. Technol 2(2):85-94.
Siswojo IB. 2013. Sistem Pengaturan Posisi Sudut Putar Motor DC Pada Model Rotary Parking Menggunakan Kontroler PID Berbasis Arduino Mega 2560.
Jurnal Mahasiswa TEUB 1(3).
Siswojo IB. 2014. Sistem Pengaturan Kecepatan Motor DC pada Alat Ektraktor Madu Menggunakan Kontroler PID. Jurnal Mahasiswa TEUB 1(2). Sujanarko B. 2013. Desain Kontrol PWM Pengatur Kecepatan Motor BLDC Untuk
Mobil Listrik. Semantik 2013 3(1):42-48.
Sukorini H. 2006. Pengaruh pestisida organik dan interval penyemprotan terhadap hama Plutella xylostella pada budidaya tanaman kubis organik. GAMMA
2(1):11-16.
Sumanti J, Lumenta AS, Pang D. 2014. Kontrol Optimal pada Balancing Robot Menggunakan Metode Linear Quadratic Regulator. Jurnal Teknik Eelektro dan Komputer UNSRAT 3(2):31-40.
Surindra MD. 2016. Analisis Respon Output dari Pemodelan Kontrol Proporsional pada Aktuator Motor DC. Eksergi 9(2).
30
Sederhana Menggunakan Pemanas Elektrik. Jurnal Teknik Elektro dan Komputer UNSRAT 2(2).
Windarto dan Haekal M. 2012. Aplikasi Pengaturan Lampu Lalulintas Berbasis Arduino Mega 2560 Menggunakan Light Dependen Resistor (LDR) dan Laser. Arsitron 3(2).
31
32
34
36
38
Lampiran 7 Rancangan rangkaian sistem kontrol pada software proteus 7
1
4 3 2
5
6
9 8
7
Keterangan:
1. Mikrokontroler arduino mega 2560 2. Potensiometer putar
3. Lcd 16x2
4. Motor DC dan encoder 5. Motor driver L298D 6. Virtual terminal 7. Ultrasonic 8. Led
39 Lampiran 8 Spesifikasi komponen alat
1. Arduino mega 2560 Spesifikasi:
Mikrokontroler : ATmega2560 Tegangan operasi : 5V
Tegangan input (dianjurkan) : 7-12V Tegangan input (batas) : 6-20V
Digital I/O Pin 54 (of which 15 provide PWM output) Pin masukan analog : 16
DC Current per I/O Pin : 40 mA Sudut deteksi terbaik adalah 15 derajat Tegangan kerja 5V DC
Resolusi 1cm
Frekuensi Ultrasonik 40 kHz
Dapat dihubungkan langsung ke kaki mikrokontroler 3. Tasco MIST-16E
Kapasitas tangki : 16 L
Charger : 100~240 volts, 50/60Hz input, 12V DC 1000 ma Output Jenis pompa : Diaphragm, Viton Valves
Kapasitas pompa : 12 volts, 07 GPM Max.40 PSI Demand Switch Berat bersih : 6.5 Kg
Dimensi : 370x250x530 mm
4. Multi-Motor Driver Shield (2-L293D) Spesifikasi:
Four H-Bridges: Two L293D Motor driver chips
L293D is rated at 0.6A per bridge (1.2A peak) with thermal shutdown protection, internal kickback protection diodes.
Motor Voltages from 4.5VDC to 16VDC. (up to 36V if C6 and C7 are upgraded)
Up to 4 bi-directional DC motors with individual 8-bit speed selection (256 speeds)
Up to 2 stepper motors (unipolar or bipolar)
Pull down resistors keep motors disabled during power-up Separate Logic and Motor power connections
Terminal block connectors for motors and power
40
5. Kran Elektrik Valve 12VDC | Kran Otomatis 12VDC Tipe Lurus Spesifikasi:
Working Voltage : 12VDC Max Current : 450mA
Operating mode : Normally open inlet / outlet : G1/2
Materials : nylon /stainless steel. polyoxymethylene Vale type : diaphargm valve (operated by servo) Max Temperature : 120C
operating preassure : 0.02 – 0.8 MPa Expected life : 200.000 +
6. DI-Smart Rotary Encoder Spesifikasi:
Piringan derajat 36 lubang dengan sudut 10 derajat. Rangkaian sensor menggunakan optocoupler tipe celah. Sumber (VCC): 3,5 – 5,5V
Logika output 0 (0 - 0.5 V) : Saat celah sensor terhalang Logika output 1 (3 - 5 V) : Saat celah sensor tanpa-halangan
Kecepatan baca sensor 1500Hz dengan 36 lubang berarti 2500 RPM Lampiran 9 Tabel hasil kalibrasi sensor ultrasonik
No
Sensor ultrasonik (cm) Pita ukur (cm) Pengujian
41 Lampiran 11 Tabel hasil pengujian luas semprotan sprayer
Tinggi nozel (30,35,dan 40 cm)
NO PWM D1
42
Lampiran 13 Tabel rata-rata hasil pengujian laboratorium sprayer pada 10 blok penyemprotan.
PWM yang digunakan (150 , 200, dan 250) dan waktu penyemprotan (20 detik) Blok Standar deviasi Rata-rata QR (ml/s)
150 200 250 150 200 250 1 0.15 0.39 0.27 9.21 9.72 10.20 2 0.05 0.2 0.33 9.15 9.61 10.6 3 0.37 0.38 0.28 9.44 9.74 10.21 4 0.15 0.39 0.36 9.21 9.72 10.04 5 0.15 0.29 0.37 9.21 9.72 10.2 6 0.15 0.39 0.27 9.21 9.72 10.20 7 0.05 0.2 0.33 9.15 9.61 10.6 8 0.37 0.38 0.28 9.44 9.74 10.21 9 0.15 0.39 0.36 9.21 9.72 10.04 10 0.15 0.29 0.37 9.21 9.72 10.2
43 Lampiran 15 Tabel intensitas serangan hama
Persentase Serangan Hama
Lampiran 16 Perhitungan persentase intensitas serangan hama
H =(DT)× 100%
Keterangan:
H = Serangan hama (%)
T = jumlah grid yang terdeteksi D = jumlah grid yang ditentukan
Dik: Dik:
T = 8.1 T = 15.5
D = 100 D = 100
Dit: Dit:
H……? H……?
Penyelesaian: Penyelesaian:
H = TD × 100% H = TD × 100% H = 1008.1 × 100% H = 15.5100 × 100% H = 0.0806 × 100% H = 0.155 × 100%
44
Lampiran 17 Hasil uji lapangan (debit dan lama semprotan)
PWM D Parameter Baris 1 Baris 2 Baris 3 Baris 4 Baris 5 Baris 6
1. Waktu (P: Perintah) dan (R: Realisasi/pengukuran) 2. Debit (P: Perintah) dan (R: Realisasi/perhitungan). 3. Volume (P: Perintah) dan (R: Realisasi/perhitungan).
Lampiran 18 Perhitungan tingkat error waktu dan volume semprotan
Error =|P-RP |×100%
Keterangan:
P = Perintah mikrokontroler R = Nilai hasil pengukuran 1. Error volume
Dik : :
P : Perintah volume 200 ml P : Perintah volume 500 ml
R : Volume hasil perhitungan 132 ml R : Volume hasil perhitungan 435 ml
Penyelesaian : Penyelesaian :
Error =200-132200 ×100% Error =500-435500 ×100
Error = % Error = 1 % 2. Error lama semprotan
Dik
P : Perintah waktu 20 detik P : Perintah waktu 60 detik
R : Hasil pengukuran waktu 23 detik R : Hasil pengukuran waktu 64 detik
Penyelesaian : Penyelesaian :
45 Lampiran 19 Perhitungan tingkat ketelitian volume semprotan dilahan
H =(RP)× 100%
Keterangan:
H = ketelitian semprotan (%) P= rata-rata V perintah (ml) R = rata-rata V aktual (ml) 1. Lama semprotan 20 detik Dik:
46
50
52
RIWAYAT HIDUP
Penulis bernama lengkap Muhammad Rizal yang dilahirkan di Bantaeng pada tanggal 27 februari 1990 dari pasangan Bapak Sampara dan Ibu Halija. Penulis merupakan anak pertama dari empat bersaudara. Penulis mendapatkan pendidikan lanjutan tingkat pertama di Smp Negeri 3 Bantaeng, kemudian melanjutkan pendidikan di Sma Negeri 2 Bantaeng. Penulis melanjutkan pendidikan sarjana di Universitas Hasanuddin (UNHAS), Fakultas Pertanian, Jurusan Teknologi Pertanian, Program Studi Keteknikan Pertanian. selama 4 tahun. Pendidikan megister pada Departemen Teknik Mesin dan Biosistem IPB, penulis mendapat pendidikan magister pada Program Studi Teknik Mesin Pertanian dan Pangan selama 3 tahun.