RANCANG BANGUN SISTEM SCADA
(SUPERVISORY CONTROL AND DATA ACQUISITION)
PADA INSTALASI PENGOLAHAN AIR SUNGAI CIHIDEUNG
INSTITUT PERTANIAN BOGOR
AGUS EKO HANDOKO
SEKOLAH PASCA SARJANA
INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA*
Dengan ini saya menyatakan bahwa tesis berjudul “Rancang Bangun Sistem SCADA (Supervisory Control And Data Acquisition) Pada Instalasi Pengolahan Air Sungai Cihideung Institut Pertanian Bogor” adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
Bogor, Agustus 2016 Agus Eko Handoko
RINGKASAN
AGUS EKO HANDOKO. Rancang Bangun Sistem SCADA (Supervisory Control And Data Acquisition) Pada Instalasi Pengolahan Air Sungai Cihideung Institut Pertanian Bogor. Dibimbing oleh ERIZAL dan YUDI CHADIRIN.
SCADA merupakan kombinasi telemetri dan akuisisi data. SCADA mengumpulkan informasi dan mentransfer kembali ke pusat kendali serta melaksanakan setiap analisis dan kontrol yang diperlukan, melalui sistem kontrol PID sebagai parameter kontrol terhadap sistem masukan data unit SCADA pada penelitian ini. Dalam perancangan sistem kontrol PID yang perlu dilakukan adalah mengatur parameter P, I atau D agar tanggapan sinyal keluaran sistem terhadap masukan tertentu sesuai yang diperlukan.
Penelitian dilakukan di instalasi pengolahan air bersih Institut Pertanian Bogor pada wilayah sungai Cihideung. Data awal operasional menunjukan untuk memberikan dosis PAC digunakan data acuan nilai NTU yang dilakukan dengan pengambilan sampel air baku pada pagi dan sore hari dengan nilai pemberian dosis 75% untuk 14kg PAC yang dicampur air 200 liter untuk perlakuan maksimal nilai 30 NTU. Pemberian dosis 75% tersebut berlaku untuk pengunaan PAC selama 7 jam.
SUMMARY
AGUS EKO HANDOKO. Design of SCADA system (Supervisory Control and Data Acquisition) At River Water Treatment Plant Cihideung Bogor Agricultural University. Supervised by ERIZAL and YUDI CHADIRIN.
SCADA is a combination of telemetry and data acquisition. SCADA proceeding by means of accumulating some information and return back to center controlling, it is also implementing every analysis and necessary control through PID control system as a control parameter to SCADA input data system in this research. In designing PID control system it is needed the arrangement of P, I and D parameter in order to acquire output signal system to particular input system which has adjusted to necessity.
The research was implemented on Water Treatment Plant in Bogor Agricultural University at Cihideung's area region. The NTU score as a starting operational data is necessary as a bench mark in PAC dose application which is obtained from the samples of morning and afternoon raw water and dose proportion is 75% for 14kgs PAC mixed with 200 Litre water within 30 NTU as the maximal treatment. 75% dose application can be imposed for 7 hours PAC usage.
The result of research indicated that the variety of percentages value in PAC dose application delivered the advantage in operating of clean water processing installation particularly for PAC needed. Design Of SCADA System indicated the outcome of unit data acquirement on certain period to determine the PAC necessity in operating Water Treatment Plant.
© Hak Cipta Milik IPB, Tahun 2016
Hak Cipta Dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan IPB
Tesis
sebagai salah satu syarat untuk mendapatkan gelar Magister Sains
pada
Program Studi Teknik Sipil dan Lingkungan
RANCANG BANGUN SISTEM SCADA (SUPERVISORY CONTROL AND DATA ACQUISITION) PADA INSTALASI PENGOLAHAN AIR
SUNGAI CIHIDEUNG INSTITUT PERTANIAN BOGOR
SEKOLAH PASCA SARJANA
INSTITUT PERTANIAN BOGOR
BOGOR
2016
Judul : Rancang Bangun Sistem SCADA (Supervisory Control And Data Acquisition) Pada Instalasi Pengolahan Air Sungai Cihideung Institut Pertanian Bogor
Nama : Agus Eko Handoko NIM : F451120151
Disetujui oleh Komisi Pembimbing
Dr Ir Erizal, M.Agr
Ketua Dr Yudi Chadirin, STP, M.Agr Anggota
Diketahui oleh,
Ketua Program Studi
Teknik Sipil dan Lingkungan
Dr Ir M Yanuar Jarwadi Purwanto, MS
Dekan Sekolah Pascasarjana
Dr Ir Dahrul Syah, MSc.Agr
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah SWT atas segala karunia, rahmat dan hidayahNya sehingga tesis dengan judul “Rancang Bangun Sistem SCADA (Supervisory Control And Data Acquisition) Pada Instalasi Pengolahan Air Sungai Cihideung Institut Pertanian Bogor” dapat diselesaikan.
Terima kasih penulis ucapkan kepada pihak-pihak yang membantu dalam penyusunan tesis ini, yaitu kepada:
1. Dr Ir Erizal, M.Agr, selaku Ketua Komisi Pembimbing dan Dr Yudi Chadirin, STP, M.Agr, selaku Anggota Komisi Pembimbing atas segala bimbingan, arahan, dan masukan yang diberikan kepada penulis selama proses penyusunan tesis.
2. Dr Satyanto Krido Saptomo, STP, MSi selaku penguji luar komisi dan Dr Ir M Yanuar Jarwadi Purwanto, MS selaku penguji wakil program studi saat pelaksanaan ujian sidang atas segala arahan dan saran perbaikan yang diberikan kepada penulis.
3. Rekan-rekan mahasiswa Pasca Sarjana Teknik Sipil dan Lingkungan angkatan 2012 atas segala dukungan dan kebersamaannya.
Semoga tesis ini dapat bermanfaat.
Bogor, Agustus 2016
DAFTAR ISI
Manfaat Penelitian ... 2
Ruang Lingkup Penelitian ... 2
2 TINJAUAN PUSTAKA ... 2
Pencemaran Air ... 2
Sumber Pencemar Air... 2
Klasifikasi Mutu Air ... 3
Bahan Koagulan ... 3
Nephelometric Turbidity Unit (NTU) ... 4
Faktor-Faktor yang Mempengaruhi Kekeruhan Air Baku ... 4
Through-Beam Sensor ... 5
Rangkaian Jembatan Wheatstone ... 6
Penguat Operasional Nonlinear ... 7
Sistem PID (Proporsional, Integral, Derivative) ... 7
Programmable Logic Controller ... 9
SCADA (Supervisory Control And Data Acquisition) ... 10
3 METODE ... 11
Kerangka Penelitian ... 11
Pengukuran Nephelometric Turbidity Unit (NTU) ... 13
Sistem Kontrol PID ... 15
Kompilasi Data dari Dokumen Publik ... 16
Analisis Data ... 17
4 HASIL DAN PEMBAHASAN ... 21
Analisa Sistem Sensor dan Penguat Operasional ... 24
Analisa Sistem SCADA ... 25
Analisa Sistem PID ... 26
5 SIMPULAN DAN SARAN ... 30
Simpulan ... 30
Saran ... 30
DAFTAR TABEL
1 Tanggapan sistem kontrol PID terhadap perubahan parameter 8 2 Bahan dan peralatan pengukuran kekeruhan air 12 3 Hasil pengukuran kekeruhan untuk dua jenis air baku 22 4 Persentase pompa dosis hasil sistem kontrol PID 23
DAFTAR GAMBAR
1 Grafik sensor keluaran analog 5
2 Konfigurasi sensor Through-Beam 6
3 Rangkaian jembatan Wheatstone 6
4 Rangkaian penguat operasional sebagai komparator tegangan 7 5 Diagram blok sistem kontrol berumpan balik 8 6 Tanggapan sistem terhadap aksi kontrol PID 8
7 Diagram alir penelitian 11
8 Titik pengambilan sampel air baku 12
9 Percobaan pengukuran kekeruhan air untuk kalibrasi sensor 13
10 Bentuk fisik sensor 14
11 Pengukuran dua jenis air baku 14
12 Sistem kontrol PID berumpan balik 15
13 Bagan alir pengukuran kekeruhan (NTU) pada PLC 15
14 Skema sistem kontrol PID pada SCADA 16
15 Kontrol untuk menghasilkan nilai PID yang diperlukan 16 16 Respon sistem kontrol PID untuk nilai Kp = 20, Ki = 30, Kd = 5 18 17 Respon sistem kontrol PID untuk nilai Kp = 50, Ki = 60, Kd = 10 18 18 Respon sistem kontrol PID untuk nilai Kp = 80, Ki = 90, Kd = 20 19 19 Respon sistem kontrol PID untuk nilai Kp = 80, Ki = 90, Kd = 10 19 20 Respon sistem kontrol PID untuk nilai Kp = 80, Ki = 90, Kd = 5 20
21 Blok sistem kontrol PID model simulink 20
22 Grafik proses kalibrasi dan formulasi yang dihasilkan 21 23 Pemasangan sensor kekeruhan pada Instalasi Pengolahan Air 23 24 Bentuk fisik pemasangan sensor pada Instalasi Pengolahan Air 24
(a) sensor pada aliran masuk air baku, (b) sensor setelah pembubuhan PAC
25 Rangkaian sensor dan penguat operasional 25
26 Sistem PID pada Instalasi Pengolahan Air 26
27 Air hasil pengedapan cepat (flokulasi) 27
28 Hasil kontrol PID pada sistem SCADA untuk katup dosis 32 % 27 29 Hasil kontrol PID pada sistem SCADA untuk katup dosis 72 % 28 30 Hasil kontrol PID pada sistem SCADA untuk katup dosis 91 % 28
1 PENDAHULUAN
Latar Belakang
Air merupakan salah satu sumber daya alam yang memiliki fungsi sangat penting bagi kehidupan dan perikehidupan manusia, serta untuk memajukan kesejahteraan umum, sehingga merupakan modal dasar dan faktor utama pembangunan (PP No. 82 Tahun 2001). Kampus IPB Dramaga merupakan tempat civitas akademika melaksanakan kegiatan akademik, kegiatan administrasi, tempat tinggal dan olahraga memiliki kebutuhan sarana air bersih yang cukup besar. Kebutuhan sarana tersebut dapat dipenuhi melalui pengolahan sumber air sungai menjadi air bersih dengan faktor utama kekeruhan. Kekeruhan didalam air disebabkan oleh materi yang tersuspensi atau tidak larut. Partikel yang tersuspensi terdiri dari materi organik, materi anorganik dan organisme hidup ataupun mati (Gregory 2006).
Perencanaan sistem pemeliharaan dan perbaikan terus menerus memerlukan rancangan yang memudahkan untuk pengembangan sistem serta perbaikannya sesuai kebutuhan. Supervisory Control and Data Acquisition (SCADA) diperlukan untuk memantau serta melakukan rekaman data pada suatu sistem secara real time. SCADA memiliki fungsi sebagai telemetery dan telecontrol. Fungsi-fungsi tersebut, memiliki kelebihan dalam melakukan pengawasan dan pengendalian banyak plant yang letaknya berjauhan dengan sistem SCADA.
Desain instalasi pengolahan air terus berubah seiring dengan kemajuan teknologi yang selalu menawarkan inovasi baru dalam sistem instalasi pengolahan air untuk proses yang lebih efisien dan ekonomis, selain itu kemajuan teknologi komputer serta bahan-bahan yang semakin baik dapat meningkatkan sistem pendukung dalam instalasi pengolahan air. (Thomas dan Edward 1990).
Perumusan Masalah
Penelitian ini dilakukan untuk menerapkan sistem SCADA sebagai alat optimasi kualitas sistem produksi pada instalasi pengolahan air. Oleh karena itu dalam penelitian ini permasalahan yang dibahas adalah sebagai berikut:
1. Bagaimana pengaruh penerapan sistem SCADA pada proses pengenalan air baku sebagai bahan masukan sistem penginderaan (sistem sensor).
2. Bagaimana pengaruh penerapan sistem SCADA pada pengideraan hasil pencampuran koagulan dengan air baku (sensor hasil pencampuran).
3. Bagaimana pengaruh penerapan sistem SCADA pada proses pengambilan keputusan pemberian dosis koagulan.
Tujuan Penelitian
2
perancangan sistem SCADA pada instalasi pengolahan air. Tujuan penelitian ini adalah sebagai berikut:
1. Membuat model PID (Proportional Integral Derivative) dari analisa nilai sensor awal dan sensor akhir setelah proses pencampuran koagulan sebagai nilai standar dalam pemberian dosis koagulan.
2. Menganalisis korelasi antara output NTU terhadap pemberian dosis koagulan pada sistem Instalasi Pengolahan Air.
Manfaat Penelitian Penelitian ini bermanfaat bagi:
1. Para pemrakarsa berbagai kegiatan pengolahan air, pekerjaan umum serta berbagai instansi yang menyajikan informasi mengenai sistem teknologi pengolahan air.
2. Para akademisi dan konsultan lingkungan yang bertugas melaksanakan kajian ilmiah pada pengolahan air.
Ruang Lingkup Penelitian Ruang lingkup dari penelitian ini adalah :
1. Penelitian dilakukan pada skala laboratorium dengan menguji dan merangkai sensor (pengindera) air baku hingga diperoleh nilai tertentu dalam skala NTU (Nephelometric Turbidity Unit), serta sensor pada air hasil pencampuran koagulan.
2. Penelitian ini membahas tentang pengaruh sensor dalam menentukan dosis koagulan yang diperlukan pada air baku sebagai bahan dasar dalam pembentukan air bersih.
2 TINJAUAN PUSTAKA
Pencemaran Air
Berdasarkan PP No. 82 Tahun 2001, pencemaran air adalah masuknya atau dimasukkannya makhluk hidup, zat, energi dan atau komponen lain ke dalam air oleh kegiatan manusia, sehingga kualitas air turun sampai ke tingkat tertentu yang menyebabkan air tidak dapat berfungsi sesuai dengan peruntukannya. Status mutu air adalah tingkat kondisi mutu air yang menunjukkan kondisi cemar atau kondisi baik pada suatu sumber air dalam waktu tertentu dengan membandingkan dengan baku mutu air yang ditetapkan. Pengendalian pencemaran air dilakukan untuk menjamin kualitas air agar sesuai dengan baku mutu air melalui upaya pencegahan dan penanggulangan pencemaran air serta pemulihan kualitas air.
Sumber Pencemar Air
3 Tahun 2001) sungai Cisadane harus memenuhi baku mutu kelas 2, yaitu untuk prasarana atau sarana rekreasi air, pembudidayaan ikan air tawar, peternakan, dan air untuk mengairi pertanaman. Kondisi saat ini di sekitar sungai Cisadane telah banyak berdiri kawasan pemukiman dan industri/pabrik yang sangat mempengaruhi kualitas air sungai tersebut. Daerah aliran sungai Cisadane selain terdapat sebaran penduduk, industri, juga terdapat lahan pertanian yang berpotensi menyumbang limbah. Oleh karena itu, disetiap lokasi pengambilan sampel air DAS Cisadane berdasarkan Peraturan Pemerintah No. 82 Tahun 2001 selama tiga periode pemantauan terdapat parameter uji yang tidak memenuhi baku mutunya. (BPLHD Jabar 2007).
Klasifikasi Mutu Air
PP No. 82 tahun 2001 mengatur klasifikasi mutu air ditetapkan menjadi 4 (empat) kelas :
1. Kelas satu, air yang peruntukannya dapat digunakan untuk air baku air minum, dan atau peruntukan lain yang memper-syaratkan mutu air yang sama dengan kegunaan tersebut;
2. Kelas dua, air yang peruntukannya dapat digunakan untuk prasarana/sarana rekreasi air, pembudidayaan ikan air tawar, peternakan, air untuk mengairi pertanaman, dan atau peruntukan lain yang mempersyaratkan mutu air yang sama dengan kegunaan tersebut; 3. Kelas tiga, air yang peruntukannya dapat digunakan untuk
pembudidayaan ikan air tawar, peternakan, air untuk mengairi pertanaman, dan atau peruntukan lain yang mempersyaratkan mutu air yang sama dengan kegunaan tersebut;
4. Kelas empat, air yang peruntukannya dapat digunakan untuk mengairi pertanaman dan atau peruntukan lain yang mempersyaratkan mutu air yang sama dengan kegunaan tersebut.
Sesuai dengan SNI 6775:2008 tentang tata cara pengoperasian dan pemeliharaan unit paket instalasi pengolahan air, maka apabila kekeruhan air baku melebihi 600 NTU atau 400 mg/L SiO2 maka air baku dialirkan dulu ke bak pengendap pendahuluan. Menurut Peraturan Menteri Kesehatan No. 416/MENKES/IX/1990, kadar maksimum kekeruhan untuk air minum dan air bersih adalah sebesar 5 NTU.
Bahan Koagulan
Sesuai dengan SNI 6774:2008 tentang tata cara perencanaan unit paket instalasi pengolahan air maka kriteria koagulan adalah sebagai berikut :
a) jenis koagulan yang digunakan;
1) Aluminium sulfat, Al2(SO4)3.l4(H2O) diturunkan dalam bentuk cair konsentrasi sebesar (5-20) %.
2) PAC, Poly Aluminium Chloride (Al10(OH)15Cl15) kualitas PAC ditentukan oleh kadar aluminium oxide (Al2O315) yang terkait sebagai PAC dengan kadar (10-11)%.
4
c) pembubuhan koagulan ke pengaduk cepat dapat dilakukan secara gravitasi atau pemompaan.
Campuran koagulan yang paling efektif dalam menurunkan kekeruhan dan zat organik sungai Cisadane adalah PAC, sedangkan yang paling efektif dalam menurunkan kadar logam Fe dan Mn adalah tawas cair. Dalam segi biaya, campuran koagulan PAC-tawas cair 75:25 lebih efisien pada tingkatan kekeruhan tinggi dibandingkan dengan koagulan yang lain. (Anugrah T 2013)
Secara umum koagulasi merupakan proses kimia dimana ion-ion yang muatannya berlawanan dengan muatan koloid dimasukkan ke dalam air, sehingga meniadakan kestabilan koloid. Dalam suatu suspensi koloid mengendap (bersifat stabil) dan terpelihara dalam keadaan terdispensi karena memiliki gaya elektrostatis yang diperoleh dari ionisasi bagian permukaan serta adsorpsi ion – ion dari larutan sekitar. Bila koagulan ditambahkan kedalam air, reaksi yang terjadi antara lain:
(a) Pengurangan zeta potensial (potensial elektrostatis) sehingga suatu titik dimana gaya vander walls dan agitasi yang diberikan menyebabkan partikel yang tidak stabil bergabung serta membentuk flok.
(b) Agresi partikel melalui rangkaian inter partikulat diantara berbagai kelompok reaktif pada koloid.
(c) Penangkapan partikel kolid negatif oleh flok – flok hidroksida yang mengendap.
Pada penggunaan alumunium sulfat sebagai koagulan, air baku harus memilki alkanitas yang memadai agar dapat bereaksi dengan alumunium sulfat menghasilkan flok hidriksida. (Pulungan 2012)
Nephelometric Turbidity Unit (NTU)
Sesuai dengan SNI 06-6989.25-2005, kekeruhan merupakan sifat pembiasan dan atau penyerapan optik dari suatu cairan, di hitung dalam satuan Nefelometrik Turbidity Unit (NTU) atau Unit Kekeruhan Nefelometri (UKN).
Kekeruhan adalah ukuran kekeruhan yang terjadi menggunakan efek cahaya sebagai dasar untuk mengukur keadaan air baku dengan skala NTU (nephelo metrix turbidity unit) atau JTU (jackson turbidity unit) atau FTU (formazin turbidity unit), kekeruhan ini disebabkan oleh adanya benda tercampur atau benda koloid di dalam air. Hal ini membuat perbedaan nyata dari segi estetika maupun dari segi kualitas air itu sendiri. Kekeruhan merupakan keadaan mendung atau kekaburan dari cairan yang disebabkan oleh partikel individu (padatan tersuspensi) yang umumnya tidak terlihat dengan mata telanjang, mirip dengan asap di udara. Pengukuran kekeruhan adalah tes kunci dari kualitas air.
Faktor-Faktor yang Mempengaruhi Kekeruhan Air Baku
5 Organisme bersel satu (mikroorganisme) didalam air dapat dianggap sebagai partikel, contohnya adalah virus, bakteri, alga (termasuk diatom), dan protozoa. Materi yang cenderung sulit untuk larut dapat terdiri dari partikel-partikel kecil yang tersuspensi didalam air dalam waktu yang cukup lama yaitu berhari-hari atau berminggu-minggu. (Gregory 2006)
Through-Beam Sensor
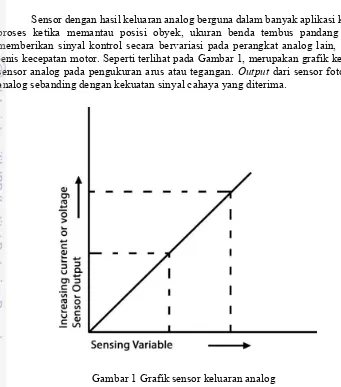
Sensor dengan hasil keluaran analog berguna dalam banyak aplikasi kontrol proses ketika memantau posisi obyek, ukuran benda tembus pandang untuk memberikan sinyal kontrol secara bervariasi pada perangkat analog lain, seperti jenis kecepatan motor. Seperti terlihat pada Gambar 1, merupakan grafik keluaran sensor analog pada pengukuran arus atau tegangan. Output dari sensor fotolistrik analog sebanding dengan kekuatan sinyal cahaya yang diterima.
Hasil keluaran sensor analog memiliki variasi tegangan atau arus serta sebanding dengan parameter penginderaan. (Garwood 1993). Seperti ditunjukkan pada Gambar 2. Sensor through-beam terdiri dari dua bagian, yaitu sensor sumber cahaya pengirim dan sensor penerima cahaya. Sensor yang memancarkan cahaya sering disebut emitor atau transmitter sedangkan sensor yang menerima cahaya sering disebut detektor cahaya atau receiver. Pada pengoprasian normal sumber cahaya yang terhalang oleh balok penerima tidak dapat diteruskan menuju detektor cahaya sehingga detektor terhalang dalam menerima cahaya masukan. Hal tersebut membuat detektor memberikan masukan sinyal dalam pengoprasian. (Scott J 1988)
6
Sensor dengan hasil keluaran analog berguna dalam banyak aplikasi kontrol proses ketika memantau posisi obyek, ukuran benda tembus pandang untuk memberikan sinyal kontrol secara bervariasi pada perangkat analog lain, seperti jenis kecepatan motor. Seperti terlihat pada Gambar 1, merupakan grafik keluaran sensor analog pada pengukuran arus atau tegangan. Output dari sensor fotolistrik analog sebanding dengan kekuatan sinyal cahaya yang diterima.
Semakin tinggi intensitas cahaya dihamburkan maka semakin tinggi pula kekeruhannya pada pengukuran intensitas cahaya yang dihamburkan secara tegak lurus terhadap lintasan cahaya menurut Lenore et al. ( 1998).
Rangkaian Jembatan Wheatstone
Jembatan wheatstone merupakan susunan rangkaian digunakan sangat luas untuk penentuan satu perlawanan yang tidak diketahui dalam tiga jaringan resistances. Seperti terlihat pada Gambar 3. di mana R1, R2, R3 dan R4 adalah resistor yang terhubung pada node a dan b melalui pembalikan saklar S ke catu daya DC. Galvanometer (G) dengan resistor (tahanan) penghubung untuk mengontrol sensitivitas, dan saklar K yang terhubung ke titik c dan d. Seperti yang terlihat pada Gambar R1 dan R3 merupakan resistor yang memiliki nilai yang telah ditentukan dan R2 adalah resistor yang dapat berubah nilainya (variable resistor) sedangkan R4 merupakan resistor yang belum diketahui nilainya untuk diukur.
Gambar 2 Konfigurasi sensor Through-Beam
7
Pada jembatan ini perubahan nilai R2 digunakan sebagai kalibrasi sampai mendapatkan sensitifitas maksimum pada pengukuran galvanometer. (Laughton dan Warne 2003)
Penguat Operasional Nonlinear
Sebuah penguat operasional menerima input dari sumber hulu dan memberikan output untuk beban hilir. Beragam jenis penguat operasional yang berbeda berasal pada sifat dari sinyal input dan output. Penguat operasional pada sirkuit ditemui sejauh ini dirancang untuk berperilaku secara linear. Linearitas dicapai dengan : (a) menggunakan umpan balik negatif untuk memaksa penguat operasional untuk beroperasi pada wilayah linear, (b) menerapkan jaringan umpan balik dengan elemen linear. Salah satu penggunaan penguat operasional nonlinier yaitu sebagai komparator tegangan, seperti terlihat pada Gambar 4 apabila pada suatu penguat operasional nonlinear membutuhkan tegangan keluaran rendah maka tegangan masuk positif (Vp) harus lebih kecil dari tegangan masuk negatif (Vn). Hal tersebut berlaku sebalikanya apabila tegangan masuk positif (Vp) lebih besar dari tegangan masuk negatif (Vn) maka tegangan keluaran menjadi tinggi. (Franco 2015)
Sistem PID (Proporsional, Integral, Derivative)
PID kontroller memiliki tiga istilah. Istilah P (Proporsional) sesuai dengan kontrol proporsional. Istilah I (Integral) merupakan tindakan kontrol yang sebanding dengan waktu yang satu paket dengan tingkat kesalahan. Hal ini memastikan bahwa kesalahan yang stabil menjadi nol. Istilah D (Derivative) sebanding dengan waktu turunan dari kesalahan kontrol. Istilah ini memungkinkan prediksi kesalahan masa depan. Ada banyak variasi dari algoritma PID dasar yang substansial akan meningkatkan kinerja dan pengoperasian. (Astrom dan Hagglund 1995)
Sistem kontrol PID terdiri dari tiga buah cara pengaturan yaitu kontrol P (Proportional), D (Derivative) dan I (Integral), dengan masing-masing memiliki kelebihan dan kekurangan. Dalam implementasinya masing-masing cara dapat bekerja sendiri maupun gabungan diantaranya.
8
Dalam perancangan sistem kontrol PID yang perlu dilakukan adalah mengatur parameter P, I atau D agar tanggapan sinyal keluaran sistem terhadap masukan tertentu sebagaimana yang diiginkan.
Merancang sistem kontrol PID, kebanyakan dilakukan dengan metoda coba-coba atau (trial dan error).
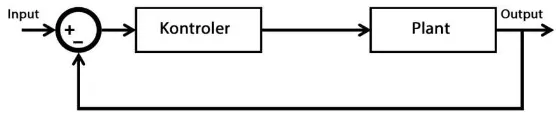
Gambar 5 Diagram blok sistem kontrol berumpan balik
Gambar 6 Tanggapan sistem terhadap aksi kontrol PID
Tabel 1. Tanggapan sistem kontrol PID terhadap perubahan parameter Tanggapan
Loop Tertutup Waktu Naik Overshoot Waktu Turun
Kesalahan Keadaan
Tunak Proporsional
(Kp) Menurun Meningkat Perubahan Kecil Menurun Integral (Ki) Menurun Meningkat Meningkat Hilang
Derivative
9 Aksi kontrol PID merupakan gabungan dari aksi P, I dan D dan fungsi alih sistem menjadi : Mendapatkan aksi kontrol yang baik dilakukan dengan langkah coba-coba kombinasi antara P, I dan D sampai ditemukan nilai Kp, Ki dan Kd seperti yang diiginkan. (Ali M 2004)
Modul PID yang digunakan dalam aplikasi kontrol proses menggabungkan algoritma PID. Sebuah algoritma merupakan program yang kompleks berdasarkan perhitungan matematis. Sebuah modul PID memungkinkan pengendalian proses untuk mengambil posisi di luar CPU. Pengaturan ini mencegah CPU dari beban perhitungan yang terlalu rumit. Prosesor mikro dalam modul PID memproses data, membandingkan data untuk mengatur poin yang diberikan oleh CPU dan menentukan sinyal output yang sesuai. (Petruzella 2005)
Programmable Logic Controller
Programmable Logic Controller (PLC) banyak digunakan dalam setiap aspek industri untuk memperluas dan meningkatkan produksi, dimana sistem otomatis yang terdahulu menggunakan ratusan atau ribuan relay, sedangkan dengan sebuah PLC dapat diprogram sebagai pengganti perangkat tersebut. Perangkat PLC telah berkembang selama bertahun-tahun yang memiliki kemampuan kendali yang bertahap seperti, kontrol gerak, kontrol proses dan sistem kontrol distribusi serta jaringan kompleks kini telah ditambahkan fungsi dari PLC. Selain untuk menghemat biaya dalam industri, mengunakan PLC memiliki keuntungan sebagai berikut :
1. Peningkatan keandalan, yaitu setelah program telah ditulis dan diuji program tersebut dapat dengan mudah didownload ke PLC lain. Karena semua logika yang terkandung dalam memori PLC, jadi dapat meminimalisasi kesalahan logika pengkabelan.
2. Fleksibilitas tinggi, yaitu lebih mudah untuk membuat dan mengubah program dalam PLC daripada mengubah system pengkabelan.
3. Biaya rendah, yaitu PLC pada awalnya dirancang untuk menggantikan kontrol logika relay. Pada pengaplikasian terlihat bahwa kontrol relay menjadi tertingal kecuali untuk aplikasi daya. Apabila pada suatu aplikasi memiliki lebih dari setengah lusin relay kontrol, maka lebih hemat jika menginstal PLC.
4. Kemampuan berkomunikasi, yaitu PLC dapat berkomunikasi dengan kontroler lain atau peralatan komputer untuk melakukan fungsi seperti kontrol pengawasan, pengumpulan data, perangkat monitoring dan parameter proses serta fungsi download dan upload program.
10
6. Mudah dalam perwatan dan perbaikan. Yaitu PLC memiliki alat diagnosa dan fungsi override (berisi status untuk menahan perubahan dari kondisi bit-bit input maupun output, sehingga status input dan output tidak akan berubah dari kondisi semula) yang memungkinkan pengguna untuk dengan mudah melacak perangkat lunak dan perangkat keras untuk memperbaiki masalah. Untuk menemukan dan memperbaiki masalah, pengguna dapat menampilkan program pengendalian pada monitor dan melihatnya secara langsung. (Petruzella 2005)
SCADA (Supervisory Control And Data Acquisition)
SCADA merupakan kombinasi telemetri dan akuisisi data. SCADA melakukan pengumpulan informasi dan mentransfer kembali ke pusat kendali serta melaksanakan setiap analisis dan kontrol yang diperlukan. Kemudian menampilkan informasi pada sejumlah layar operator atau display. Tindakan pengendalian yang diperlukan dapat disampaikan kembali ke proses. Terdiri dari dua perangkat yaitu : 1. Perangkat keras SCADA, merupakan sebuah sistem SCADA yang terdiri dari sejumlah Remote Terminal Unit (RTU) yang mengumpulkan data di lapangan (plant) serta mengirim data kembali ke pusat kendali melalui sistem komunikasi. Pusat kendali menampilkan data yang diperoleh dan juga memungkinkan operator untuk melakukan tugas-tugas remote control. Pada sistem SCADA yang lebih kompleks pada dasarnya ada lima tingkat atau hierarki : (a) perangkat instrument dan perangkat kontrol (sensor) yang berada di plant, (b) Remote Terminal Unit (RTU), (c) sistem komunikasi, (d) pusat kendali, (e) sistem komputer sebagai pengolah data.
2. Perangkat lunak SCADA, Software SCADA dibagi menjadi dua jenis, yaitu berlisensi atau terbuka (open source). Perusahaan mengembangkan perangkat lunak berlisensi untuk berkomunikasi dengan perangkat keras yang mereka miliki. Sistem ini dijual sebagai solusi kunci terhadap perangkat keras tersebut. Masalah utama dengan sistem ini adalah ketergantungan besar pada pemasok sistem. Sistem perangkat lunak terbuka telah mendapatkan popularitas karena interoperabilitas yang mereka bawa ke sistem. Interoperabilitas adalah kemampuan untuk mencampur peralatan produsen yang berbeda pada sistem yang sama. Perangkat lunak SCADA terdiri dari bebrapa fitur utama yang meliputi : (a) antarmuka pengguna, (b) tampilan layar (display), (c) alarm peringatan, (d) tren data, (e) antarmuka RTU dan PLC, (f) Skala, (g) akses menuju data, (h) basis data, (i) jaringan, (j) toleransi kesalahan, (k) client/server dalam pendistribusian. (Clarke et al. 2004)
11
3 METODE
Kerangka Penelitian
Pengukuran Nephelometric Turbidity Unit (NTU) pada penelitian ini dilakukan dengan mengunakan prinsip kekeruhan air pada perbandingan intensitas cahaya yang disebabkan oleh suatu larutan standard dalam kondisi yang sama, semakin rendah intensitas cahaya yang terserap makin tinggi kekeruhannya.
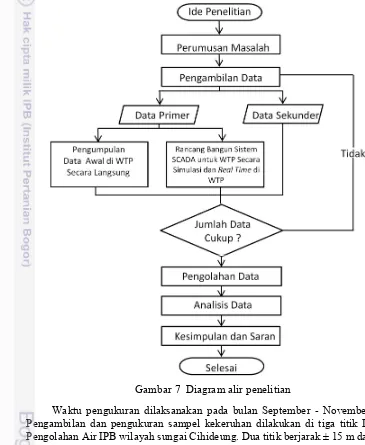
Pengumpulan data sekunder juga dilakukan pada penelitian ini. Langkah-langkah penelitian selengkapnya dapat dilihat pada Gambar 6 dalam bentuk diagram alir.
Waktu pengukuran dilaksanakan pada bulan September - November 2015. Pengambilan dan pengukuran sampel kekeruhan dilakukan di tiga titik Instalasi Pengolahan Air IPB wilayah sungai Cihideung. Dua titik berjarak ± 15 m dari input air baku sungai menuju pompa dosis. satu titik berikutnya berjarak ± 2 m dari
12
pompa dosis menuju air baku hasil flokulasi (pengendapan cepat) seperti terlihat pada Gambar 8.
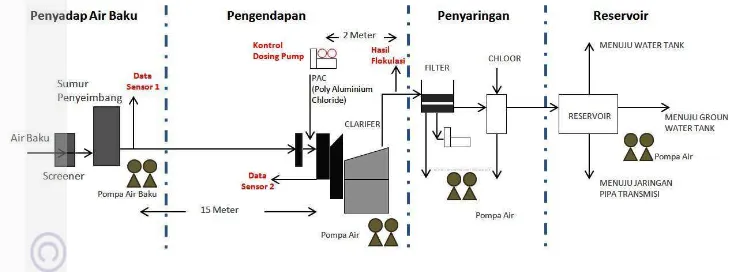
Proses pengolahan air baku dari sungai dimulai dari air sungai masuk melalui penyaring menuju sumur penyeimbang, lalu dipompakan untuk diberi perlakuan zat koagulan (PAC) dan dialirkan menuju bak pengendap cepat. Hasil pengendapan ini digunakan untuk proses filtrasi (penyaringan) mengunakan pasir kwarsa dalam tiga tahap.
Hasil penyaringan diberikan perlakuan klorinasi untuk sterilisasi air bersih untuk dialirkan menuju penampungan air sementara. Air dari penampungan merupakan hasil sistem proses Instalasi Pengolahan Air bersih yang siap didistribusikan menuju bak penampung pada masing-masing pemilik kepentingan. Daftar bahan dan peralatan yang dipergunakan disajikan dalam Tabel 2.
Gambar 8 Titik pengambilan sampel air baku
Tabel 2 Bahan dan peralatan pengukuran kekeruhan air
No. Spesifikasi
1. Spesifikasi Bahan
Air Baku untuk Instalasi Pengolahan Air
Air Baku hasil pencampuran dengan Poly Aluminium Chloride (PAC) 2. Spesifikasi Peralatan
Sensor kekeruhan dengan metode through-beam analog output 0 sampai 10 Volt
Catu Daya [ DC 10V]
PLC Modul [ SIMATIC S7-1200 CPU 1214 6ES7 214-1AG40-0XB0]
Catu Daya [ HILED : HL250L-H1V24]
Pompa Air Submersible [DC 12V 5800Rpm 60 Watt 70l/m]
Catu Daya [ Input AC 220V Output DC 0-12V]
Portable Microprocessor Turbidity Meter [ HI 93703 HANNA Instrument]
13 Pengukuran Nephelometric Turbidity Unit (NTU)
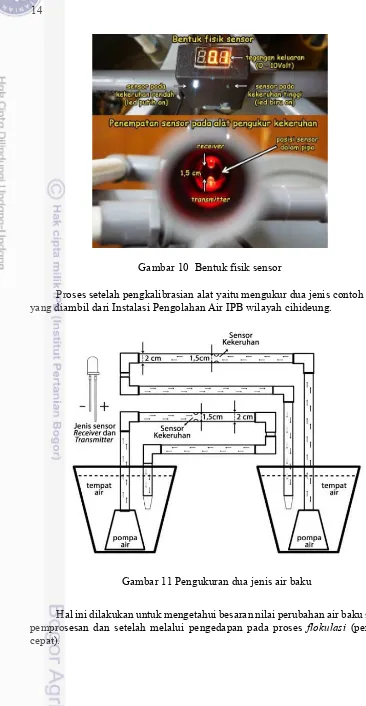
Pengambilan sampel air baku dari sungai Cihideung pada Instalasi Pengolahan Air IPB dilakukan dengan metode sampling untuk pengambilan air baku, yaitu dengan cara meghisap air melalui pompa submersible. Air baku dilewatkan melalui pipa pvc yang telah ditempatkan sensor optik dengan metode through-beam sensor. Sensor optik ditempatkan pada jarak 1,5cm untuk pemasangan sensor pengirim dan penerima pada diameter pipa sebesar 2cm. Sedangkan kecepatan pompa air pada putaran 5800rpm atau sebesar 70l/m pada saat awal menghidupkan peralatan. Pada jangka waktu 2 menit kecepatan pompa air diturunkan menjadi 2900rpm atau dengan kapasitas 35l/m. Melalui perlakuan laju alir 35l/m dengan metode through-beam sensor diperoleh hasil keluaran analog perubahan nilai dari 0 sampai 10 Volt hasil keluaran sensor sesuai dengan kualitas air baku yang diukur. Melalui hasil keluaran sensor tersebut maka dapat dilakukan pengukuran keadaan air baku untuk menentukan nilai kekeruhannya sesuai standar NTU dan dengan pengkalibrasian hasil pengukuran melalui alat Portable Microprocessor Turbidity Meter.
Percobaan pengukuran air baku dengan sensor yang mengunakan metode through-beam dapat dilihat pada Gambar 9 untuk kalibrasi sensor sedangkan pada Gambar 10 merupakan bentuk fisik dan penempatan sensor pengirim dan penerima. Sedangkan Gambar 11 merupakan bagan alir sistem kerja sensor yang telah dipasang pada PLC sebagai kontroller dan membaca data masukan sebagai bahan pengambil keputusan dalam memberikan dosis PAC sesuai dengan kebutuhan instalasi pengolahan air.
14
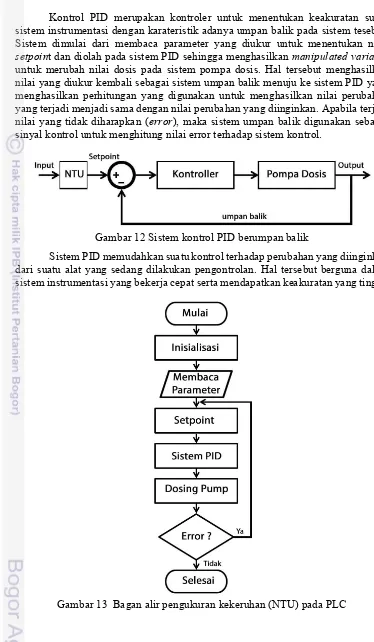
Proses setelah pengkalibrasian alat yaitu mengukur dua jenis contoh air baku yang diambil dari Instalasi Pengolahan Air IPB wilayah cihideung.
Hal ini dilakukan untuk mengetahui besaran nilai perubahan air baku sebelum pemprosesan dan setelah melalui pengedapan pada proses flokulasi (pengendap cepat).
Gambar 10 Bentuk fisik sensor
15
Sistem Kontrol PID
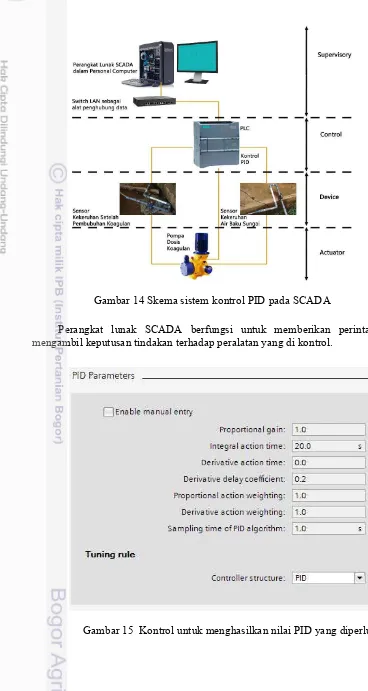
Kontrol PID merupakan kontroler untuk menentukan keakuratan suatu sistem instrumentasi dengan karateristik adanya umpan balik pada sistem tesebut. Sistem dimulai dari membaca parameter yang diukur untuk menentukan nilai setpoint dan diolah pada sistem PID sehingga menghasilkan manipulated variable untuk merubah nilai dosis pada sistem pompa dosis. Hal tersebut menghasilkan nilai yang diukur kembali sebagai sistem umpan balik menuju ke sistem PID yang menghasilkan perhitungan yang digunakan untuk menghasilkan nilai perubahan yang terjadi menjadi sama dengan nilai perubahan yang diinginkan. Apabila terjadi nilai yang tidak diharapkan (error), maka sistem umpan balik digunakan sebagai sinyal kontrol untuk menghitung nilai error terhadap sistem kontrol.
Sistem PID memudahkan suatu kontrol terhadap perubahan yang diinginkan dari suatu alat yang sedang dilakukan pengontrolan. Hal tersebut berguna dalam sistem instrumentasi yang bekerja cepat serta mendapatkan keakuratan yang tinggi.
Gambar 12 Sistem kontrol PID berumpan balik
16
Perangkat lunak SCADA berfungsi untuk memberikan perintah serta mengambil keputusan tindakan terhadap peralatan yang di kontrol.
Gambar 14 Skema sistem kontrol PID pada SCADA
17 Melalui sistem PID yang teritegrasi dalam modul PLC input air baku sungai digunakan sebagai sinyal awal nilai dugaan kekeruhan menjadi setpoint, sedangkan sensor kekeruhan setelah pembubuhan koagulan digunakan sebagai sinyal kontrol berumpan balik melalui proses sistem kontrol PID.
Respon cepat dan akurat yang dihasilkan pada sistem kontrol dilakukan dengan seting parameter PID yang diperlukan yaitu nilai Kp, Ki dan Kd pada sistem kontrol PID melalui perangkat lunak SCADA
Kompilasi Data dari Dokumen Publik
Data yang dikumpulkan merupakan data sekunder dari dokumen Instalasi Pengolahan Air IPB yaitu, data hasil pengukuran kualitas air baku yang diutamakan pada parameter NTU. Dokumen publik yang dimaksud adalah dokumen hukum yang berlaku mengenai persyaratan air serta standar SNI untuk pengelolaan Instalasi Pengolahan Air. Data tersebut adalah hasil pengukuran kualitas air baku yang diutamakan pada parameter NTU. Pengambilan sampel dilakukan di Instalasi Pengolahan Air IPB.
Analisis Data
Analisis data dilakukan untuk mendapatkan korelasi antara nilai awal kualitas air baku sebelum pembubuhan PAC dengan kualitas air baku setelah pembubuhan PAC sesuai dosis pengunaan PAC untuk kebutuhan pengolahan air. Analisis yang digunakan merupakan analisis sistem kontrol PID (Proportional, Integral dan Derivative) sederhana dengan bantuan komputer menggunakan program olah data Matlab.
Sistem kontrol PID memiliki tiga cara dalam pengaturan yaitu kontrol P (Proportional), D (Derivative) dan I (Integral), Sistem kontrol tersebut memiliki kelebihan dan kekurangan, pada penerapan sistem kontrol PID dapat bekerja secara mandiri maupun secara gabungan. Mendapatkan sinyal keluaran dari sistem PID yang diinginkan harus dilakukan pengaturan terhadap parameter P,I dan D pada saat perancangan sistem tersebut.
Suatu sistem kontrol PID dapat bekerja sampai mendekati ideal dalam suatu plant, maka diperlukan analisa hasil uji coba pada sistem dengan sistem trial dan error melalui software Matlab. Dalam penelitian ini menggunakan fungsi alih :
( ) ( ) =
+ +
+ (5 + ) + (8 + ) + (2)
18
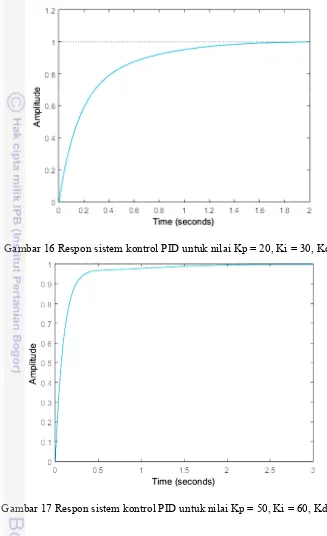
Dari hasil percobaan terhadap perubahan nilai Kp, Ki dan Kd maka dicari nilai perubahan pada grafik yang menunjukan kondisi ideal suatu sistem kontrol PID, yaitu dengan menyeimbangkan nilai Kp, Ki dan Kd. Berikut grafik respon sistem PID terhadap perubahan nilai Kp, Ki dan Kd.
19
20
Dari beberapa percobaan yang dilakukan maka untuk mendapatkan kondisi ideal dalam merancang kontrol PID memerlukan peningkatan beberapa kondisi Kp, Ki dan Kd. Hal tersebut dilakukan dengan cara : (a) menambahkan Kp untuk meningkatkan rise time (waktu naik), (b) menambahkan Kd untuk mengurangi overshoot (melampaui), (c) menambahkan Ki untuk mengurangi error steady state (perbedaan antara masukan dan keluaran sistem terhadap masukan uji tertentu pada saat waktu mendekati tak hingga, t → ∞).
Uji coba untuk model sistem kontrol PID juga dapat dilakukan dengan Matlab Simulink untuk mendapatkan respon sistem kontrol PID yang ideal seperti hasil uji coba model Matlab diatas.
Gambar 20 Respon sistem kontrol PID untuk nilai Kp = 80, Ki = 90, Kd = 5
21
4 HASIL DAN PEMBAHASAN
Analisis Korelasi Tegangan (V) Pada Kekeruhan Air Baku
Korelasi linear antara tegangan yang dihasilkan dan kekeruhan air baku menunjukan semakin besar nilai tegangan yang dihasilkan, maka semakin besar nilai kekeruhannya (NTU). Hal tersebut ditimbulkan karena perubahan nilai tegangan pada sensor dipengaruhi oleh jumlah intensitas cahaya yang masuk pada saat air mengalir melalui sensor tersebut. Semakin baik kualitas air maka intensitas cahaya yang masuk semakin banyak pada saat pembacaan sensor. Hal sebaliknya berlaku pada hasil keluaran untuk nilai kekeruhan tertinggi. Hasil pengukuran kalibrasi tersebut dapat dilihat pada Gambar 21.
Hasil kalibrasi menghasilkan perumusan untuk menghitung besaran nilai tegangan yang dihasilkan terhadap nilai NTU yang ditentukan.
= 3,7736 − 1,7941 (3)
Grafik proses kalibrasi menunjukan bahwa semakin besar nilai kekeruhan yang diperoleh maka linearitas dalam pengukuran semakin menyimpang. Hal tersebut terjadi karena sistem dalam sensor kekeruhan yang digunakan memiliki akurasi dari 3 sampai 30 NTU untuk skala tegangan output 0 sampai 10 Volt. Melalui metode yang sama pada saat kalibrasi sensor pengukuran berikutnya dilakukan dengan membandingkan 2 jenis air, yaitu air baku dari sungai dan air baku setelah penambahan PAC. Hasil pengukuran dapat dilihat pada Tabel 3.
22
Data pada Tabel 3 diperoleh dari operasional Instalasi Pengolahan Air IPB pada sungai Cihideung untuk tipe konvensional yaitu dengan dosis koagulan (PAC) sebesar 75% pada skala 0-100% dengan campuran bahan koagulan PAC 14kg/200 Liter air untuk pemakaian selama 7 jam.
Hasil pengukuran menunjukan untuk dosis PAC yang sama pada tiap perlakuan air menghasilkan nilai NTU air baku yang cukup untuk proses selanjutnya yaitu penyaringan melalui pasir kwarsa pada tabung filtrasi sistem Instalasi Pengolahan Air.
Data pengukuran selanjutnya dilakukan dengan memberlakukan sistem pembubuhan dosis koagulan yang berbeda pada setiap perlakuan input air baku. Hal tersebut dihasilkan melalui sistem kontrol PID yang bekerja dengan menginisialisasi nilai dugaan awal air baku menjadi setpoint dan mengolah data melalui sistem PID yang menghasilkan nilai manipulated variable (perubahan yang terjadi) untuk memerintahkan besar kecilnya nilai dosis koagulan.
Hasil dari pembubuhan koagulan tersebut diukur kembali menjadi nilai umpan balik sebagai data masukan sistem PID untuk memberikan keputusan apakan nilai perubahan yang terjadi telah sama dengan nilai perubahan yang diinginkan sehingga menghasilkan keputusan yang akurat dalam pemberian koagulan berdasarkan nilai perubahan NTU.
Hasil pengukuran NTU dalam perhitungan skala input dan output NTU menghasilkan dosis yang berbeda pada tiap perlakuan kekeruhan air baku. Data masukan air baku berasal dari sistem sensor awal sebagai air baku dari sungai, sedangkan sistem sensor kedua diperoleh dari pengukuran air baku setelah proses pembubuhan koagulan.
Data pengukuran pada Instalasi Pengolahan Air IPB di wilayah sungai Cihideung dapat dilihat pada Tabel 4.
Tabel 3 Hasil pengukuran kekeruhan untuk dua jenis air baku
23
Nilai kekeruhan yang diperoleh dari hasil perubahan dosis PAC diukur setelah melalui proses flokulasi (proses pengendapan cepat melalui membran yang digunakan pada proses tersebut).
Seperti terlihat pada Tabel 4 input dan output NTU terhadap perubahan dosis PAC yang diberikan pada input air baku sebanding dengan kenaikan NTU input terhadap perubahan persentasi pompa dosis yang menghasilkan penurunan yang cukup untuk proses filtrasi (proses penyaringan air setelah proses flokulasi melalui pasir kwarsa).
Tabel 4 Persentase pompa dosis hasil sistem kontrol PID
No. dari sungai Air baku
24
Data dari sistem SCADA diperoleh dari input air baku dan data sinyal kontrol setelah proses pumbubuhan PAC seperti terlihat pada Gambar 24.
Analisa Sistem Sensor dan Penguat Operasional
Hubungan antara air baku sungai dan air baku bercampur PAC pada pengukuran kekeruhan di instalasi pengolahan air menunjukkan adanya korelasi dengan nilai kekeruhan yang dihasilkan turun setelah pencampuran air baku dengan PAC melalui proses flokulasi sebesar 4-11 NTU untuk setiap perlakuan air baku dengan dosis yang sama.
Proses pengukuran yang dilakukan pada air baku mendapatkan hasil keluaran tegangan yang berbeda untuk dikonversi menjadi nilai NTU tertentu berawal dari sinyal perubahan tinggi rendahnya kekeruhan yang dibaca melalui sensor dengan metode jembatan wheatstone yang bekerja pada model throughbeam melalui detektor optik. Sinyal keluaran perubahan tegangan tersebut masih sangat kecil sehingga diperlukan penguat operasional yang bekerja sebagai komparator tegangan seperti terlihat pada Gambar 22.
(a) (b)
Gambar 24. Bentuk fisik pemasangan sensor pada instalasi pengolahan air (a) sensor pada aliran masuk air baku,
(b) sensor setelah pembubuhan PAC
25 Metode jembatan wheatstone pada sensor menyeimbangkan nilai tegangan keluar (V-Out 1) dari percabangan menjadi nol pada saat awal, yaitu D1 memancarkan cahaya yang diterima oleh D2 dengan hambatan air baku yang memiliki nilai 1 sampai 2 NTU. Setelah air baku berubah menjadi bernilai 30NTU maka D2 terhambat dalam menerima cahaya dari D1. Hal tersebut membuat nilai tegangan keluar (V-Out 1) menjadi tinggi. Perubahan nilai keluaran dari V-Out 1 ini masih rendah, maka diteruskan ke penguat operasional.
Seperti terlihat pada Gambar 22 dimana tegangan masuk pada percabangan nomer 7 (+) dan 4 (-) adalah nilai perubahan tegangan dari sensor sedangkan tegangan masuk pada percabangan nomer 6 (-) dan 5 (+) sebagai tegangan masuk penyeimbang, yaitu nilai R11 dapat berubah sebagai pengatur keseimbangan. Pada sinyal V-Out 2 dan 3 diberikan lampu led sebagai penanda sinyal untuk uji kekeruhan tinggi dan rendah. Kemampuan penguat opeasional sebagai komparator tegangan ini bekerja bersarkan rumus :
= ( )< ( ) (4)
= ( )> ( ) (5)
Dari rumus tersebut maka apabila nilai kekeruhan rendah maka D3 menyala, hal tersebut terjadi karena ( )< ( ) pada tegangan masuk Op-Amp 1 sehingga
logika keluaran V-Out 2 menjadi rendah. Hal tersebut berlaku terbalik pada Op-Amp 2, yaitu apabila tegangan masuk pada ( )> ( ) maka D4 menyala sebagai
tanda nilai kekeruhan tinggi. Hal ini sesuai dengan peryataan apabila pada suatu penguat operasional nonlinear membutuhkan tegangan keluaran rendah maka tegangan masuk positif (Vp) harus lebih kecil dari tegangan masuk negative (Vn). Hal tersebut berlaku sebaliknya apabila tegangan masuk positif (Vp) lebih besar dari tegangan masuk negative (Vn) maka tegangan keluaran menjadi tinggi. (Franco 2015)
Analisa Sistem SCADA
Nilai yang diperhitungkan sebagai sinyal masukan pada sistem SCADA adalah nilai perubahan sensor analog dari nilai 0V sampai 10V. Op-Amp 3 bekerja sebagai komparator tegangan yang menguatkan sinyal perubahan dari nilai kekeruhan rendah sampai tinggi yang dinotasikan dalam satuan Volt sebagai sinyal keluaran analog. Pada nilai perubahan tegangan tersebut dideteksi oleh perangkat PLC sebagai sinyal masukan untuk membentuk pola sistem kontrol PID. Hasil sistem kontrol tersebut dinotasikan dalam satuan persen sebagai tolak ukur dalam pemberian dosis PAC pada proses kerja instalasi pengolahan air.
26
terjadi perubahan nilai NTU pada air baku sungai maka sensor kedua akan menstabilkan perubahannya.
Analisa Sistem PID
Data pada sensor 1 digunakan sebagai data awal yaitu setpoin untuk menentukan kekeruhan awal. Pada saat sistem telah memperoleh setpoin maka data tersebut digunakan sebagai target awal sensor 2 untuk merespon perubahan nilai kekeruhan dari sensor 1 sehingga sistem kontrol PID mendapatkan respon perubahan dari sensor 2 sebagai sinyal kontrol untuk memberikan dosis PAC sesuai dengan kebutuhan. Prosesor mikro dalam modul PID memproses data, membandingkan data untuk mengatur poin yang diberikan oleh CPU dan menentukan sinyal output yang sesuai. (Petruzella 2005). Hal tersebut dapat digambarkan sebagai berikut :
Perubahan yang terjadi = nilai kekeruhan awal (NTU)
Perubahan yang yang diinginkan = dosis koagulan yang diperlukan (%) Perubahan yang mempengaruhi = nilai kekeruhan setelah pencampuran
koagulan
Jadi yang dikontrol adalah air baku hasil pencampuran dengan koagulan (PAC). Untuk mengetahui kekeruhan air secara real time maka dipasanglah sensor kekeruhan. Program matematis dalam komputer (TIA PORTAL) diperlukan untuk melaksanakan perintah kontrol PID yang dapat berkomunikasi untuk menerima sinyal dari sensor kekeruhan. Sinyal kekeruhan awal digunakan sebagai nilai setpoint, sedangkan sinyal kekeruhan setelah proses pencampuran PAC digunakan sebagai sinyal kontrol dalam memberikan dosis koagulan dalam satuan persen (%).
Proses pada program PID dikerjakan dengan mencari nilai error untuk looping secara otomatis, yaitu dengan cara mengurangkan nilai setpoint dengan perubahan yang mempengaruhi dari sensor kekeruhan. Nilai error dimasukkan ke dalam hitungan PID dan menghasilkan suatu nilai manipulated variabel yang akan dikirim ke sistem pompa dosis dalam bentuk signal untuk menaikan atau
27 menurunkan tingkat pembubuhan koagulan dalam persentase. Sehingga air baku mendapatkan perlakuan dosis koagulan yang sesuai. Ketika nilai kekeruhan dari sensor awal sama dengan hasil pengukuran sensor setelah pencampuran koagulan (perubahan yang terjadi = perubahan yang diinginkan) maka nilai error = 0 yang artinya tujuan pengontrolan tercapai, maka sistem PID akan mengirim signal perubahan = 0, dapat diartikan perubahan nilai dosis sudah sesuai sehingga pada pompa dosis nilai variabel pompa dosis berhenti pada persentase nilai yang telah ditentukan dari hasil pengontrolan sistem PID.
Hasil sinyal output pada sistem SCADA digambarkan dalam bentuk grafik respon sistem terhadap perubahan sinyal input dan sinyal kontrol. Sumbu x merupakan respon waktu dalam detik dan sumbu y merupakan setpoin (biru muda), sinyal kontrol (hijau), persentase pompa dosis (merah).
Gambar 27 Air hasil pengendapan cepat (proses flokulasi)
28
Dari data perubahan nilai dosis PAC yang bervariasi menghasilkan nilai output NTU yang tidak berbeda dengan nilai output NTU dengan dosis PAC 75%. Hal ini memberikan keuntungan terhadap pengunaan bahan kimia PAC.
Hasil percobaan terlihat pada grafik diatas menunjukan bahwa kestabilan sistem kontrol terlihat dari nilai NTU air baku yang rendah sampai tinggi, tetapi ketika nilai NTU semakin tinggi maka pembacaan sensor sinyal kontrol mulai terganggu adanya muatan pasir, seresah tanaman, sampah kecil dan beberapa partikel lain yang ikut dalam air baku dari sungai.
Hal tersebut disebabkan oleh sistem screen (penyaring sampah pada input air baku sungai) masih meloloskan sampah yang berukuran kecil sehingga bisa melewati input air baku dengan diameter pipa 4 inchi.
Gambar 29 Hasil kontrol PID pada sistem SCADA untuk katup dosis 72 %
29
Untuk operasional nilai NTU yang berada diatas nilai 30 maka pada operasional instalasi pengolahan air mengunakan dosis yang sama dengan jumlah PAC 2 kali 14 kg dicampur dengan 200 liter air. Dalam sistem SCADA yang diterapkan untuk operasional instalasi pengolahan air dapat dilakukan sampling air baku secara terus menerus selama beroperasinya sistem pengolahan air.
30
5 SIMPULAN DAN SARAN
SimpulanHasil perancangan sistem SCADA pada instalasi pengolahan air menunjukkan bahwa:
a. Sistem kontrol PID merespon cepat terhadap perubahan nilai input NTU air baku, sedangkan sinyal sinyal kontrol digunakan sebagai sinyal kendali terhadap output yang dihasilkan.
b. Berdasarkan output NTU, perubahan nilai katup dosis koagulan berkorelasi positif terhadap nilai NTU input air baku. Hal ini menunjukan tingkat efisiensi terhadap pengunaan koagulan pada operasional Instalasi Pengolahan Air dibandingan dengan nilai katup dosis koagulan yang tetap terhadap perubahan nilai NTU. Hal tersebut juga terlihat dari satuan waktu dalam mengunakan koagulan PAC.
Model sistem kontrol SCADA menguntungkan dalam memperoleh hasil akhir serta dapat digunakan sebagai alat analisa pengunaan koagulan PAC untuk waktu tertentu dan berkelanjutan.
Saran
Saran yang disusun berdasarkan hasil penelitian antara lain:
1. Menganti pompa dosis yang terpasang pada Instalasi Pengolahan Air Bersih IPB menjadi pompa dosis yang dapat bekerja otomatis sesuai perintah (kendali) dari sistem PID.
2. Pengukuran konsentrasi air baku sebelum proses filtrasi perlu dilakuan untuk mengetahui penurunan nilai NTU terhadap pengaruh pemberian dosis.
31
DAFTAR PUSTAKA
Anugrah T. 2013. Efektivitas Campuran Poli(Aluminium Klorida) (PAC) dan Aluminium Sulfat (Tawas) sebagai Koagulan dalam Pengolahan Air Bersih.
Ali M. 2004. Pembelajaran Perancangan Sistem Kontrol PID Dengan Software Matlab. Jurnal Edukasi@Elektro Vol. 1, No. 1, Oktober 2004, hlm. 1 – 8. [BPLHD] Badan Pengendalian Lingkungan Hidup Daerah Jawa Barat. 2008. Status
Lingkungan Hidup 2008 tentang Daerah Aliran Sungai Cisadane.
Clarke G. Reynders D. Wright E. 2004. Practical Modern SCADA Protocols : DNP3, 60870.5 and Related Systems. Elsevier
Franco S. 2015. Design With Operational Amplifiers And Analog Integrated Circuits-Fourth Edition. San Francisco State University. McGraw-Hill series in electrical and computer engineering.
Garwood B. 1993. Handbook of Photoelectric Sensing by Banner Engineering Corp. Astrom K. Hagglund T. 1995. PID Controllers, 2nd Edition
Gregory J. 2006. Particles in Water : Properties and Processes. CRC Press Taylor and Francis Group
Laughton M. Warne D. 2003. Electrical Engineer's Reference Book. Sixteenth edition. Newnes Elsevier Science.
Lenore S. Clescerl. Arnold E. Greenberg, Andrew D. Eaton. 1999. Standard Methods for the Examination of Water and Wastewater. by American Public Health Association, American Water Works Association, Water Environment Federation
[MENKES] Kementrian Kesehatan. 1990. Peraturan Pemerintah Nomor 416 Tahun 1990 tentang Syarat-syarat Dan Pengawasan Kualitas Air.
[MENLH] Kementrian Lingkungan Hidup. 2001. Peraturan Pemerintah Nomor 82 Tahun 2001 tentang Pengelolaan Kualitas Air Dan Pengendalian Pencemaran Air.
Petruzella F. 2005. Programmable logic Controllers, Third Edition. McGraw-Hill. Pulungan A. 2012. Evalusi Pemberian Dosis Koagulan Aluminium Sulfat Cair dan
Bubuk Pada Sistem Dosing Koagulan di Instalasi Pengolahan Air Minum PT. Krakatau Tirta Industri.
Scott J. 1988. Photoelectric Sensors and Controls. Selection and Application, First Edition.
Stuart G. 2013. Designing SCADA Application Software : A Practical Approach First Edition. Elsevier.
SNI 06-6989.25-2005 mengenai Cara Uji kekeruhan Dengan Nefelometer. Bagian 25 tentang Air dan Air Limbah
SNI 6774:2008 mengenai Tata Cara Perencanaan Unit Paket Instalasi Pengolahan Air.
32
RIWAYAT HIDUP
Penulis dilahirkan di Yogyakarta pada tanggal 11 Agustus 1979 dari ayah Marsono (alm) dan ibu Suwarti. Penulis adalah putra pertama. Tahun 1997 penulis lulus dari SMUN Negeri 4 Tegal dan pada tahun yang sama penulis diterima di Program Diploma Teknilk Instrumentasi dan Kontrol, Fakultas Teknologi Pertanian, IPB. Penulis lulus pendidikan diploma pada tahun 2000. Pada tahun 2008 penulis berkesempatan untuk melanjutkan studi pada program alih jenjang strata satu Teknik Elektronika, Fakultas Teknologi Industri , ISTN. Kesempatan untuk melanjutkan ke program Pascasarjana Departemen Teknik Sipil dan Lingkungan, IPB diperoleh pada tahun 2012.