MEREKABENTUK DAN MEMBANGUNKAN SISTEM GERUDI BERPANDUKAAN KOORDINAT
MOHAMAD AZLI CHE AZHAR
i
“Saya akui bahawa saya telah membaca karya ini dan pada pandangan saya karya ini adalah memadai dari skop dan kualiti untuk tujuan penganugerahan
Ijazah Sarjana Muda Kejuruteraan Elektrik (Kawalan, Instrumentasi dan Automasi)”
Tandatangan : _______________________ Nama Penyelia : ENCIK MASLAN ZAINON
ii
MEREKABENTUK DAN MEMBANGUNKAN SISTEM GERUDI BERPANDUKAN KOORDINAT
MOHAMAD AZLI CHE AZHAR
Laporan ini dihantar bagi memenuhi keperluan penganugerahan Ijazah Sarjana Muda Kejuruteraan Elektrik
(Kawalan, Instrumentasi dan Automasi)
Fakulti Kejuruteraan Elektrik
Universiti Teknikal Malaysia Melaka (UTeM)
iii
PENGAKUAN
“Saya akui bahawa laporan ini adalah hasil kerja saya sendiri kecuali ringkasan dan petikan yang tiap-tiap satunya saya jelaskan sumbernya”
Tandatangan : _______________________ Nama Penyelia : MOHAMAD AZLI CHE AZHAR
iv
DEDIKASI
Istimewa untuk ibunda, Nahariah bt. Mohd Noor, ayahanda,
v
PENGHARGAAN
vi
ABSTRAK
vii
ABSTRACT
viii
ISI KANDUNGAN
BAB PERKARA HALAMAN
PENGESAHAN PENYELIA i
TAJUK PROJEK ii
PENGAKUAN iii
DEDIKASI iv
PENGHARGAAN v
ABSTRAK vi
ABSTRACT vii
ISI KANDUNGAN viii
SENARAI GAMBARAJAH xi
SENARAI JADUAL xiii
SENARAI LAMPIRAN xiv
SENARAI SINGKATAN
I PENGENALAN
1.1 Pengenalan 1
1.2 Huraian projek 2
1.3 Penyataan masalah 3
1.4 Objektif projek 3
1.5 Skop projek 4
ix
II KAJIAN ILMIAH
2.1 Kajian Pertama: Gerudi Automatik 5
2.2 Kajian Kedua: Stesen Gerudi Automatik 7
2.3 Teori 9
2.3.1 Motor Stepper 9
2.3.1.1 Operasi Motor Stepper 10
2.3.2 Suis Penghad 12
2.3.3 Soket Selari (Parallel Port) 13
2.3.3.1 Kegunaan Soket Selari 13 2.3.3.2 Sambungan Soket Selari 15
2.3.4 Optocoupler 18
2.3.5 Perisian Visual Basic 6.0 19
2.3.5.1 Kelebihan Perisian Visual Basic 6.0 19
III METODOLOGI PROJEK
3.1 Metodologi Projek 20
3.2 Pembangunan Projek 22
3.2.1 Kajian Ilmiah dan Rekabentuk Projek 22
3.2.2 Pembangunan Perisian 24
3.2.3 Pembangunan Perkakasan 27
3.2.4 Menggabungkan Perisian dan Perkakasan 28
3.2.5 Pengujian dan Troubleshooting 30
IV HASIL PROJEK
4.1 Perkakasan Projek 31
4.1.1 Pendawaian Perkakasan Projek 37
4.2 Litar Kawalan 38
4.2.1 Litar Kawalan Geganti 38
x
4.3 Pengantaramuka Grafik Pengguna (GUI) 44
4.3.1 Atucara Visual Basic 6.0 46
4.4 Konsol Tangan 52
4.5 Pengawal Atucara Logik (PLC) 54
4.5.1 Penentuan Masukan 55
4.5.2 Penentuan Keluaran 55
4.5.3 Atucara PLC 56
4.6 Hasil Projek 58
4.7 Kos Projek 60
4.7.1 Kos Komponen Elektrik dan Elektronik 60
4.7.2 Kos Kerangka Projek 61
4.7.3 Kos Lain-lain 61
4.7.4 Kos Keseluruhan 62
4.8 Pengujian dan Troubleshooting 62
4.8.1 Ujian Pendawaian Litar Kawalan 63 4.8.2 Ujian Pendawaian Antara Litar Kawalan dan PLC 64
4.8.3 Ujian Simulasi Atucara PLC 66
V PERBINCANGAN
5.1 Perbincangan 69
5.2 Masalah yang Dihadapi 70
5.2.1 Masalah Mekanikal 70
5.2.2 Masalah Elektrikal 72
5.3 Cadangan Penambahbaikan 73
KESIMPULAN 74
RUJUKAN 75
CARTA GANTT 76
xi
SENARAI GAMBARAJAH
GAMBARAJAH TAJUK HALAMAN
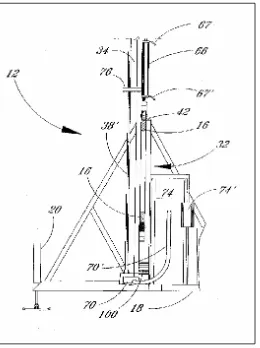
2.1 Pandangan sisi Sistem Gerudi Automatik 6
2.2 Pandangan hadapan Sistem Gerudi Automatik 7
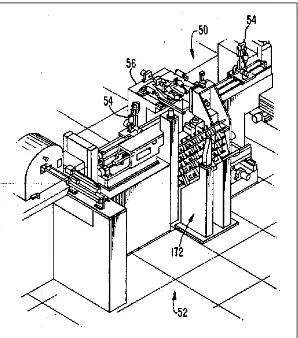
2.3 Stesen Gerudi Automatik 8
2.4 Putaran lengkap motor stepper 10
2.5 Putaran separuh langkah (half stepping) 11
2.6 Litar skematik motor stepper 12
2.7 Suis penghad 12
2.8 Soket selari 13
2.9 Optocoupler 4N35 18
3.1 Carta Alir Metodologi Projek 21
3.2 (a) Gambaran awal paksi-X 23
3.2 (b) Gambaran awal paksi-Y 23
3.2 (c) Gambaran awal paksi-Z 23
3.3 Microsoft Visual Basic 6.0 24
3.4 Soket selari komputer 25
3.5 Isyarat denyut 26
3.6 Gambaran awal litar pengantara 29
4.1 Bahagian 1 (Kerangka Utama) 32
4.2 Bahagian 2 (Meja Paksi-X) 33
4.3 Bahagian 3 (Paksi-Z) 34
4.4 Bahagian 4 (Pemegang Gerudi) 35
4.5 Perkakasan projek 36
[image:12.612.146.517.223.721.2]xii
4.7 Litar pendawaian suis penghad perkakasan 37
4.8 Litar kawalan geganti 38
4.9 Sambungan geganti dan masukan PLC 39
4.10 Sambungan keluaran PLC dengan litar stepper motor
40
4.11 Stepper motor driver 41
4.12 Litar kawalan geganti 41
4.13 Litar stepper motor driver 42
4.14 Litar soket selari 43
4.15 Litar soket selari 44
4.16 Pengantaramuka Grafik Pengguna 45
4.17 Tetingkap amaran 45
4.18 Konsol tangan 52
4.19 Litar konsol tangan 53
4.20 Konsol tangan 54
4.21 Atucara PLC 56
4.22 PLC Omron CQM1H 57
4.23 Hasil projek 58
4.24 Hasil projek 59
4.25 Hasil projek 59
4.26 Litar kawalan 63
4.27 Penyambungan wayar antara PLC dan litar kawalan. 65
4.28 Atucara PLC dengan CX-Programmer 67
xiii
SENARAI JADUAL
JADUAL TAJUK HALAMAN
2.1 Senarai pin soket selari 17
4.1 Program Visual Basic 6.0 46
4.2 Penentuan masukan PLC 55
4.3 Penentuan keluaran PLC 55
4.4 Kos komponen elektrik dan elektronik 60
4.5 Kos kerangka projek 61
4.6 Kos lain-lain 61
xiv
SENARAI LAMPIRAN
LAMPIRAN TAJUK HALAMAN
A Menggunakan Soket Selari (Parallel Port) Untuk Mengawal Data
77
B Motor Stepper 95
C Cara Mengawal Motor Stepper 103
xv
SENARAI SINGKATAN
PLC - Pengawal Atucara Logik
GUI - Pengantaramuka Grafik Pengguna
VB6 - Visual Basic 6.0
USB - Universal Serial Bus
EMF - Pembalikan Daya Elektromotif
BASIC - Beginners All-Purpose Symbolic Instruction Code
LED - Diod Pemancar Cahaya
1
BAB I
PENGENALAN
Bab ini merupakan pengenalan kepada projek yang menjelaskan mengenai pengenalan, huraian, penyataan masalah, objektif serta skop projek.
1.1 Pengenalan
2
Oleh yang demikian, projek ini menggabungkan penggunaan sistem komputer, Pengawal Atucara Logik (PLC) serta perkakasan (hardware) bagi menghasilkan satu sistem automasi yang ringkas sebagai salah satu alat pembelajaran bagi membantu proses pengajaran dan pembelajaran di pusat-pusat pendidikan. Selain itu, projek ini juga dihasilkan bagi memberikan pendedahan awal kepada para pelajar kepada teknologi automasi yang digunakan di industri pada hari ini.
1.2 Huraian Projek
3
1.3 Penyataan Masalah
Sistem gerudi berpandukan koorinat ini direka sebagai kit pembelajaran bagi memberikan pendedahan awal kepada para pelajar kepada sistem automasi yang digunakan dalam bidang industri pada hari ini. Oleh yang demikian, terdapat beberapa sebab kenapa projek ini dihasilkan. Sistem gerudi yang terdapat di kebanyakan pusat-pusat pendidikan di Malaysia pada hari ini adalah satu sistem gerudi yang ringkas yang menggunakan teknologi berpuluh-puluh tahun dahulu. Sistem gerudi ini hanya mampu digerakkan dalam satu paksi sahaja. Selain itu, sistem ini juga memerlukan khidmat operator untuk beroperasi. Sistem ini juga tidak boleh diprogramkan bagi melakukan sesuatu kerja yang hendak dilakukan. Tambahan pula, pada hari ini kit pembelajaran yang menggabungkan penggunaan komputer dan perkakasan (hardware) adalah amat sukar untuk didapati serta harganya yang mahal.
1.4 Objektif Projek
Antara objektif yang hendak dicapai dalam menghasilkan projek ini adalah:
a) Membangunkan sebuah kit pembelajaran bagi membantu proses pengajaran dan pembelajaran.
b) Membangunkan mesin gerudi yang boleh digerakkan pada paksi X,Y dan Z. c) Menggunakan perisian Visual Basic 6.0 (VB6) untuk menghasilkan
Pengantaramuka Grafik Pengguna (GUI).
d) Menggunakan Pengawal Atucara Logik (PLC) sebagai pengawal kepada proses-proses yang dilakukan oleh perkakasan (hardware).
4
1.5 Skop Projek
Skop adalah sesuatu yang amat penting dalam menghasilkan sesuatu projek. Ini adalah kerana, skop projek menghadkan sesuatu projek itu kepada tahap-tahap tertentu yang perlu dicapai. Oleh yang demikian, skop bagi projek ini adalah:
a) Membangunkan sistem gerudi berpandukan koordinat sebagai kit pembelajaran di pusat pengajian.
b) Sistem gerudi mampu menggerudi pada bahan kerja yang berasaskan kayu. c) Sistem gerudi digerakkan dalam 3 paksi dengan menggunakan stepper motor.
1.6 Jangkaan Hasil
Selepas berakhirnya projek ini, adalah dijangkakan bahawa:
a) Menyiapkan sistem gerudi berpandukan koordinat sebagai kit pembelajaran. b) Mengunakan perisian Visual Basic 6 (VB) atau Visual C++ untuk
menghasilkan Pengantaramuka Grafik Pengguna (GUI).
c) Menghubungkan komputer dengan perkakasan luaran melalui soket selari (parallel port).
5
BAB II
KAJIAN ILMIAH
Bab ini menerangkan secara ringkas beberapa kajian yang telah dijalankan sepanjang menghasilkan projek ini. Kajian-kajian ini termasuk beberapa projek yang telah dihasilkan yang mempunyai kaitan dengan projek ini serta teori-teori komponen serta peralatan yang digunakan dalam menghasilkan projek ini.
2.1 Kajian Pertama: Gerudi Automatik
6
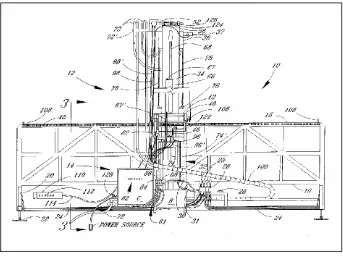
[image:22.612.218.478.337.685.2]Satu komputer yang boleh diprogram digunakan untuk mengawal pergerakan alat gerudi dari keadaan tegak ke keadaan yang berserenjang dengan permukaan yang hendak digerudi. Komputer itu kemudiannya akan mengaktifkan alat gerudi untuk menggerudi dengan kedalaman tertentu yang telah ditetapkan oleh operator sebelum menyah-aktifkan alat gerudi tersebut. Seterusnya komputer akan mengembalikan kedudukan alat gerudi kepada keadaan asal. Alat gerudi kemudiannya akan digerakkan ke kedudukan seterusnya untuk menggerudi lubang yang berikutnya. Proses penggerudian kemudiannya akan diulang sehingga kesemua lubang yang hendak digerudi siap di gerudi [8].
7
Gambarajah 2.2: Pandangan hadapan Sistem Gerudi Automatik
2.2 Kajian Kedua: Stesen Gerudi Automatik
Stesen Gerudi Automatik yang digunakan dalam sistem pembuatan yang dikawal oleh komputer. Sistem ini terdiri daripada pengapit yang memegang bahan kerja pada meja kerja yang mendatar, alat gerudi yang boleh menukar mata gerudi mengikut kesesuaian kerja, sistem pemanduan yang boleh menggerakkan alat gerudi dalam paksi mendatar dalam kawasan kerja. Selain itu, sistem ini juga mempunyai satu ruang penyimpanan pelbagai jenis serta saiz mata gerudi dan satu robot khas yang ditugaskan untuk mengambil, menyimpan serta menukarkan mata gerudi.
8