DIGITASI OTOMATIS OBJEK BANGUNAN PADA CITRA SATELIT
MENGGUNAKAN METODE K MEANS CLUSTERING
SKRIPSI
BOHO SURIANTO NAIBAHO
091402047
PROGRAM STUDI S1 TEKNOLOGI INFORMASI
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA
MEDAN
2014
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat memperoleh ijazah Sarjana Teknologi Informasi
BOHO SURIANTO NAIBAHO 091402047
PROGRAM STUDI S1 TEKNOLOGI INFORMASI
FAKULTAS ILMU KOMPUTER DAN TEKNOLOGI INFORMASI
UNIVERSITAS SUMATERA UTARA
MEDAN
PERSETUJUAN
Judul : DIGITASI OTOMATIS OBJEK BANGUNAN
PADA CITRA SATELIT MENGGUNAKAN METODE K MEANS CLUSTERING
Kategori : SKRIPSI
Nama : BOHO SURIANTO NAIBAHO
Nomor Induk Mahasiswa : 091402047
Program Studi : SARJANA (S1) TEKNOLOGI INFORMASI
Departemen : TEKNOLOGI INFORMASI
Fakultas : ILMU KOMPUTER DAN TEKNOLOGI
INFORMASI
Diluluskan di Medan, Juli 2014
Komisi Pembimbing :
Pembimbing 2 Pembimbing 1
Baihaqi Siregar, S.Si.MT NIP. 19790108 201212 1 002
Dr. Syahril Efendi, S.Si.M.IT NIP. 19671110 199602 1 001
Diketahui/Disetujui oleh
Program Studi Teknologi Informasi Ketua,
M. Anggia Muchtar, ST.,MM.IT NIP. 19800110 200801 1 010
PERNYATAAN
DIGITASI OTOMATIS OBJEK BANGUNAN PADA CITRA SATELIT MENGGUNAKAN METODE K MEANS CLUSTERING
SKRIPSI
Saya mengakui bahwa skripsi ini adalah hasil kerja saya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2014
UCAPAN TERIMA KASIH
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa dan Maha Penyayang, dengan segala rahmat dan karuniaNya penulisan tugas akhir ini berhasil diselesaikan dalam waktu yang telah ditetapkan. Selama penyelesaian tugas akhir ini, banyak bantuan dan kerja sama serta doa dan dukungan dari berbagai pihak, oleh karena itu penulis sampaikan ucapan terima kasih sedalam-dalamnya dan penghargaan kepada :
1. Kedua orang tua dan sanak saudara penulis yang telah memberikan dukungan dan motivasi baik materil dan spiritual, ayahanda R. Naibaho dan Ibunda K. Sinurat yang selalu sabar dalam mendidik dan membesarkan penulis.
2. Bapak Dr. Syahril Efendi, S.Si.M.IT dan Bapak Baihaqi Siregar, S.Si.MT selaku pembimbing yang telah banyak meluangkan waktu dan pikirannya, memotivasi dan memberikan kritik dan saran kepada penulis.
3. Bapak Ade Candra,S.T.M.Kom dan Bapak Romi Fadillah Rahmat, B.Comp.Sc.M.Sc yang telah bersedia menjadi dosen pembanding yang telah memberikan kritik dan saran kepada penulis.
4. Ketua dan Sekretaris Program Studi Teknologi Informasi, Bapak M. Anggia Muchtar, ST.,MM.IT dan Bapak M. Fadly Syahputra, B.Sc.,M.Sc.IT.
5. Dekan dan Pembantu Dekan Fakultas Ilmu Komputer dan Teknologi Informasi Universitas Sumatera Utara, semua dosen serta pegawai di Fakultas Ilmu Komputer dan Teknologi Informasi.
Semoga segala kebaikan dan bantuannya dibalas oleh Tuhan Yang Maha Esa dan semoga tugas akhir ini dapat bermanfaat bagi semua pihak yang memerlukannya.
ABSTRAK
Perkembangan ilmu pengetahuan dan teknologi di bidang sistem informasi geografis semakin memberikan kemudahan dalam melakukan pendataan objek spasial. Digitasi adalah salah satu contoh perkembangan tersebut. Citra direkam dengan menggunakan satelit, kemudian disimpan dalam format file gambar. Citra ini nantinya akan dianalisis oleh praktisi pemetaan untuk berbagai macam kebutuhan, sebagai contoh : pendataan IMB maupun perencanaan tata ruang kota. Namun, citra ini masih berupa gambar hasil photo yang banyak terdapat objek-objek yang tidak diperlukan sesuai kebutuhan. Oleh karena itu, diperlukan proses digitasi untuk memperoleh informasi sesuai kebutuhan. Pada penelitian ini dirancang sebuah metode untuk melakukan digitasi secara otomatis yang disebut k means clustering. K means clustering yang dirancang dalam penelitian ini digabungkan dengan teknik morfologi gambar untuk mendapat hasil ekstraksi yang lebih baik. Berdasarkan pengujian terhadap tujuh jenis data citra, hasil digitasi dengan metode k means clustering memperoleh nilai kualitas rata-rata 0.8623 dimana nilai maksimal adalah 1.
AUTOMATIC DIGITIZATION ON BUILDINGS OBJECT FROM
SATELLITE IMAGERY USING K MEANS CLUSTERING
ABSTRACT
Developments in science and technology in the field of geographic information systems increasingly provide ease of data collection of spatial objects . Digitization is one example of these developments . Using satellite imagery recorded , then stored in an image file format . This imagery will be analyzed by mapping practitioners for a variety of needs , for example : IMB data collection and spatial planning . However , this image is a photo image that there are many objects that are not required as needed. Therefore, the digitization process is required to obtain the information as needed. In this study designed a method to automatically digitized called k means
clustering. K means clustering is designed in this study combined with the technique
of morphological image to get a better extraction results . Based on testing of the seven types of image data , the results of digitization with k means clustering method to get the value of average quality is 0.8623 where the maximum value is 1.
Keywords: k means clustering, digitization, satellite imagery
DAFTAR ISI
PERSETUJUAN ... I
PERNYATAAN ...II
UCAPAN TERIMA KASIH ... III
ABSTRAK ... IV ABSTRACT ... V
DAFTAR ISI ... VI
DAFTAR TABEL ... VIII
DAFTAR GAMBAR ... IX
BAB 1 PENDAHULUAN ... 1
1.1 LATAR BELAKANG ... 1
1.2 RUMUSAN MASALAH ... 2
1.3 BATASAN MASALAH ... 2
1.3 TUJUAN PENELITIAN ... 2
1.4 MANFAAT PENELITIAN ... 2
1.5 METODOLOGI PENELITIAN ... 2
1.6 SISTEMATIKA PENULISAN ... 3
BAB 2 LANDASAN TEORI ... 5
2.1.SISTEM INFORMASI GEOGRAFIS ... 5
2.2.PENGERTIAN GARIS LINTANG DAN GARIS BUJUR ... 9
2.3. CITRA SATELIT ... 10
2.4.DIGITASI ... 11
2.5.KARAKTERISTIK CITRA SATELIT QUICKBIRD ... 12
2.6 DATA VEKTOR ... 12
2.8.1 Clustering ... 14
2.8.2Algoritma k means clustering ... 15
2.8.3 Kelebihan dan Kelemahan algoritma K-means ... 19
2.9MEDIAN FILTERING ... 20
BAB 3 ANALISIS DAN PERANCANGAN SISTEM ... 23
3.1 DATA YANG DIGUNAKAN ... 23
3.2 ANALISIS SISTEM ... 23
3.3 GENERAL ARCHITECTURE ... 41
3.4 PERANCANGAN TAMPILAN ANTARMUKA ... 42
BAB 4 IMPLEMENTASI DAN PENGUJIAN ... 44
4.1 IMPLEMENTASI SISTEM ... 44
4.1.1Spesifikasi hardware dan software yang digunakan ... 44
4.1.2Implementasi perancangan antarmuka ... 44
4.2 PENGUJIAN SISTEM ... 45
4.2.1Rencana pengujian sistem ... 46
4.2.2Kasus dan hasil pengujian sistem ... 46
4.2.3Pengujian kinerja sistem ... 48
4.2.4 Evaluasi Hasil ... 53
BAB5 KESIMPULANDANSARAN ... 65
5.1KESIMPULAN ... 65
5.2SARAN ... 65
DAFTAR PUSTAKA ... 66
DAFTAR TABEL
Hal.
Tabel 2.1. Karakteristik citra quickbird ... 13
Tabel 2.2 Penelitian Terdahulu ... 22
Tabel 4.1 Rencana Pengujian Sistem ... 46
Tabel 4.2 Hasil Pengujian Komponen ... 46
Tabel 4.2 Hasil Pengujian Komponen (Lanjutan) ... 47
Tabel 4.2 Hasil Pengujian Komponen (Lanjutan) ... 48
Tabel 4.3 Data Hasil Pengolahan K Means Clustering ... 49
Tabel 4.4. Tabel Hasil Median Filtering ... 50
Tabel 4.5. Hasil Pengenalan Koordinat ... 52
Tabel 4.6. Hasil Translasi Koordinat ... 52
DAFTAR GAMBAR
Hal. GAMBAR 2.1. DIAGRAM ALIR ALGORITMA K MEANS CLUSTERING ... 17 GAMBAR 2.2. HASIL DARI PROSES CLUSTERING DENGAN
MENGGUNAKAN ALGORITMA K-MEANS CLUSTERING... 19 GAMBAR 2.3. BLOCK DIAGRAM ALUR KERJA MEDIAN FILTER…………20 GAMBAR 2.4. CONTOH PENERAPAN MEDIAN FILTER ...21 GAMBAR 3.1 MATRIKS UNTUK MEDIAN FILTERING 4X4 ... 24 GAMBAR 3.2. PROSES SELEKSI PIKSEL YANG TERHUBUNG ... 25 GAMBAR 3.3. METODE FILLGRID UNTUK MENCARI PIKSEL BERNILAI 1 26 GAMBAR 3.4. PRIORITAS PENCARIAN PIKSEL BERNILAI 1 ... 26 GAMBAR 3.6 FLOWCHART TAHAPAN MEDIAN FILTERING ... 28 GAMBAR 3.7. FLOWCHART TAHAPAN PENGENALAN CIRI BANGUNAN .... 29 GAMBAR 3.7. FLOWCHART TAHAPAN PENGENALAN CIRI BANGUNAN
(LANJUTAN) ... 30 GAMBAR 3.7. FLOWCHART TAHAPAN PENGENALAN CIRI BANGUNAN
(LANJUTAN) ... 31 GAMBAR 3.7. FLOWCHART TAHAPAN PENGENALAN CIRI BANGUNAN
(LANJUTAN) ... 34 GAMBAR 3.7. FLOWCHART TAHAPAN PENGENALAN CIRI BANGUNAN
(LANJUTAN) ... 35 GAMBAR 3.7. FLOWCHART TAHAPAN PENGENALAN CIRI BANGUNAN
(LANJUTAN) ... 36
GAMBAR 3.7. FLOWCHART TAHAPAN PENGENALAN CIRI BANGUNAN
(LANJUTAN) ... 37
GAMBAR 3.8 FLOWCHART TAHAPAN PENGENALAN KOORDINAT ... 38
GAMBAR 3.9 FLOWCHART TAHAPAN PENYUSUNAN POLYGON BANGUNAN ... 39
GAMBAR 3.9 FLOWCHART TAHAPAN PENYUSUNAN POLYGON BANGUNAN (LANJUTAN) ... 40
GAMBAR 3.10 GENERAL ARCHITECTURE ... 41
GAMBAR 3.11 RANCANGAN JENDELA UTAMA (MAIN WINDOW) ... 43
GAMBAR 4.1 TAMPILAN JENDELA UTAMA (MAIN WINDOW) ... 45
GAMBAR 4.2 CITRA SATELIT ... 48
GAMBAR 4.3. HASIL SEGMENTASI DENGAN METODE K MEANS CLUSTERING ... 49
GAMBAR 4.4. HASIL MEDIAN FILTERING ... 51
GAMBAR 4.5. HASIL GAMBAR ULANG. ... 51
GAMBAR 4.6 OBJEK BANGUNAN YANG TELAH DIKENALI KOORDINATNYA DIBUKA DENGAN APLIKASI SISTEM INFORMASI GEOGRAFIS. ... 53
GAMBAR 4.7. HASIL DIGITASI SECARA MANUAL ... 54
GAMBAR 4.8. BENTUK PENGUJIAN AKURASI DAN KETEPATAN ... 54
GAMBAR 4.9. CITRA 2 ... 56
GAMBAR 4.10. HASIL DIGITASI OTOMATIS CITRA 2 ... 56
GAMBAR 4.11. HASIL DIGITASI MANUAL CITRA 2 ... 57
GAMBAR 4.12. CITRA 3 ... 57
GAMBAR 4.13. HASIL DIGITASI OTOMATIS CITRA 3. ... 58
GAMBAR 4.14. HASIL DIGITASI MANUAL CITRA 3. ... 58
GAMBAR 4.16. HASIL DIGITASI OTOMATIS CITRA 4. ... 59
GAMBAR 4.17. HASIL DIGITASI MANUAL CITRA 4. ... 60
GAMBAR 4.18. CITRA 5. ... 60
GAMBAR 4.19. HASIL DIGITASI MANUAL CITRA 5. ... 61
GAMBAR 4.20. HASIL DIGITASI OTOMATIS CITRA 5 ... 61
GAMBAR 4.21. HASIL DIGITASI OTOMATIS CITRA 6 ... 62
GAMBAR 4.22. HASIL DIGITASI OTOMATIS CITRA 6 ... 62
GAMBAR 4.23. HASIL DIGITASI OTOMATIS CITRA 6 ... 62
GAMBAR 4.24. CITRA 7 ... 63
GAMBAR 4.25. HASIL DIGITASI OTOMATIS CITRA 7 ... 63
GAMBAR 4.26. HASIL DIGITASI MANUAL GAMBAR 7 ... 64
ABSTRAK
Perkembangan ilmu pengetahuan dan teknologi di bidang sistem informasi geografis semakin memberikan kemudahan dalam melakukan pendataan objek spasial. Digitasi adalah salah satu contoh perkembangan tersebut. Citra direkam dengan menggunakan satelit, kemudian disimpan dalam format file gambar. Citra ini nantinya akan dianalisis oleh praktisi pemetaan untuk berbagai macam kebutuhan, sebagai contoh : pendataan IMB maupun perencanaan tata ruang kota. Namun, citra ini masih berupa gambar hasil photo yang banyak terdapat objek-objek yang tidak diperlukan sesuai kebutuhan. Oleh karena itu, diperlukan proses digitasi untuk memperoleh informasi sesuai kebutuhan. Pada penelitian ini dirancang sebuah metode untuk melakukan digitasi secara otomatis yang disebut k means clustering. K means clustering yang dirancang dalam penelitian ini digabungkan dengan teknik morfologi gambar untuk mendapat hasil ekstraksi yang lebih baik. Berdasarkan pengujian terhadap tujuh jenis data citra, hasil digitasi dengan metode k means clustering memperoleh nilai kualitas rata-rata 0.8623 dimana nilai maksimal adalah 1.
AUTOMATIC DIGITIZATION ON BUILDINGS OBJECT FROM
SATELLITE IMAGERY USING K MEANS CLUSTERING
ABSTRACT
Developments in science and technology in the field of geographic information systems increasingly provide ease of data collection of spatial objects . Digitization is one example of these developments . Using satellite imagery recorded , then stored in an image file format . This imagery will be analyzed by mapping practitioners for a variety of needs , for example : IMB data collection and spatial planning . However , this image is a photo image that there are many objects that are not required as needed. Therefore, the digitization process is required to obtain the information as needed. In this study designed a method to automatically digitized called k means
clustering. K means clustering is designed in this study combined with the technique
of morphological image to get a better extraction results . Based on testing of the seven types of image data , the results of digitization with k means clustering method to get the value of average quality is 0.8623 where the maximum value is 1.
Keywords: k means clustering, digitization, satellite imagery
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Ekstraksi terhadap objek pada citra satelit, umumnya menggunakan metode digitasi. Digitasi merupakan proses konversi dari peta analog menjadi peta digital, cara kerjanya adalah dengan mengkonversi fitur-fitur spasial yang ada pada peta menjadi kumpulan koordinat x,y (Puntodewo,2003). Proses digitasi dapat dilakukan dengan menggunakan digitizer, yaitu sebuah peranti elektronik untuk ”menjiplak” gambar
atau dengan menjiplak gambar secara manual menggunakan aplikasi digitasi seperti AutoCAD, ArcGis, ArcInfo (Yulianto, 2003).
Digital image processing merupakan proses pengambilan atribut-atribut pada
gambar dengan input dan output yang berupa gambar (Gonzalez dan Woods, 2002).
Digital image processing mempunyai banyak macam aplikasi pada berbagai bidang,
seperti: penajaman gambar, identifikasi objek pada gambar, pengurangan noise,
konversi gambar berwarna ke graysca!e dan sebaliknya, kompresi data pada gambar, dan sebagainya (Gonzalez dan Woods, 2002).
Perkembangan ilmu pengetahuan dan teknologi di bidang Sistem Informasi Geografis dan Image Processing semakin memberikan kemudahan dalam melakukan ekstraksi atau pengenalan pola pada citra. Penelitian terhadap ekstraksi objek pada citra satelit telah dilakukan sejak beberapa tahun terakhir, baik dengan pendekatan garis maupun dengan pendekatan warna.
Penelitian sebelumnya Urban-area and building detection using SIFT
keypoints and graph theory (B. Sirmacek dan C. Unsalan) membahas tentang deteksi
Image (Chungan Lin dan Ramakant Nevatia) membahas tentang pendeteksian serta penggambaran bangunan 3D (3 Dimensi) dari citra satelit.
Pada penelitian ini akan diterapkan algortima K Means Clustering dalam membangun sebuah aplikasi ekstraksi objek bangunan pada citra satelit. Kelebihan dari algoritma K MeansClustering yaitu mampu mengelompokkan objek dengan data yang banyak dengan sangat cepat. Algoritma K Means merupakan algoritma optimasi dengan cara mengelompokkan data berdasarkan fitur-fitur ke dalam K kelompok data, dengan cara meminimalisasi jarak centroid terhadap klaster data.
1.2 Rumusan Masalah
Berdasarkan uraian pada latar belakang maka dapat diambil rumusan masalah yaitu bagaimana melakukan identifikasi objek bangunan pada citra satelit secara otomatis. 1.3 Batasan Masalah
Permasalahan pada penelitian ini dibatasi oleh hal sebagai berikut :
1 Menggunakan metode K Means Clustering dengan 2 kluster yaitu kluster warna hitam dan kluster warna putih.
2 Jenis citra yang digunakan yaitu citra dari satelit Quickbird. 1.3 Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah untuk melakukan identifikasi objek bangunan pada citra satelit dengan keluaran berupa data vektor berekstensi .shp (shapefile). 1.4 Manfaat Penelitian
Penelitian ini diharapkan akan memberikan manfaat, sebagai berikut :
1 Membantu mempercepat proses ekstraksi objek bangunan pada citra satelit yang biasa dilakukan secara manual.
2 Menyumbangkan metode yang dapat digunakan dalam mengekstraksi objek bangunan pada citra satelit untuk keperluan Sistem Informasi Geografis.
1.5 Metodologi Penelitian
Metodologi penelitian yang digunakan pada penelitian ini adalah:
1. Studi Literatur
Studi literatur dilakukan dengan cara mengumpulkan bahan referensi yaitu dari buku, artikel, paper, jurnal, makalah, maupun situs-situs dari internet. Studi literatur yang dilakukan berkaitan dengan perbaikan citra, pengenalan pola gambar, metode k-means Klustering.
2. Pengumpulan Data
Pada tahap ini dilakukan pengumpulan data dan informasi yang akan diperlukan dalam penelitian.
3. Analisis dan Perancangan
Pada tahap ini dilakukan analisis terhadap studi literatur untuk mengetahui penyelesaian permasalahan ekstraksi objek bangunan pada citra satelit. Setelah itu dilakukan perancangan sistem berdasarkan analisis yang telah dibuat sebelumnya.
4. Implementasi
Pada tahap ini dilakukan penerapan hasil dari analisis dan perancangan.
5. Pengujian
Pada tahap ini dilakukan pengujian aplikasi yang telah dibuat untuk mengetahui apakah aplikasi tersebut sudah berjalan dengan benar dan sesuai dengan perancangan yang telah dilakukan sebelumnya.
6. Penyusunan Laporan
Pada tahap ini dilakukan penyusunan dokumentasi dari hasil analisis dan implementasi dari aplikasi yang telah dibuat.
1.6 Sistematika Penulisan
Sistematika penulisan skripsi ini dibagi menjadi lima bagian utama, yaitu: Bab 1: Pendahuluan
Bab 2: Landasan Teori
Bab ini membahas teori-teori yang digunakan untuk menyelesaikan permasalahan yang akan dibahas pada penelitian ini.
Bab 3: Analisis dan Perancangan
Bab ini berisi analisis dan penerapan k means klustering untuk ekstraksi objek bangunan pada citra satelit. Bab ini juga berisi perancangan sistem dan perancangan interface dari aplikasi yang akan dibuat.
Bab 4: Implementasi dan Pengujian
Pada bab ini dibahas implementasi dari aplikasi yang akan dibuat. Setelah itu dilakukan pengujian untuk memastikan apakah hasil yang didapat sesuai dengan target yang diharapkan atau tidak.
Bab 5: Kesimpulan dan Saran
Bab ini berisikan kesimpulan dan penelitian yang telah dilakukan beserta saran-saran yang berguna untuk penelitian selanjutnya.
BAB 2
LANDASAN TEORI
2.1. Sistem Informasi Geografis
Sistem Informasi Geografi (SIG) atau Geographic Information System (GIS) adalah suatu sistem informasi yang dirancang untuk bekerja dengan data yang bereferensi spasial atau berkoordinat geografi atau dengan kata lain suatu SIG adalah suatu sistem basis data dengan kemampuan khusus untuk menangani data yang bereferensi keruangan (spasial) bersamaan dengan seperangkat operasi kerja (Barus dan Wiradisastra, 2000). Sementara menurut Heywood (2002) Sistem Informasi Geografi (SIG) adalah sistem komputer yang dapat menyimpan dan menggunakan
data untuk menggambarkan tempat – tempat dipermukaan bumi. Disamping itu, SIG
juga dapat menggabungkan data, mengatur data dan melakukan analisis data yang akhirnya akan menghasilkan keluaran yang dapat dijadikan acuan dalam pengambilan keputusan pada masalah yang berhubungan dengan geografi.
Dengan memperhatikan pengertian Sistem Informasi, maka SIG merupakan suatu kesatuan formal yang terdiri dari berbagai sumber daya fisik dan logika yang berkenaan dengan objek-objek yang terdapat di permukaan bumi. SIG bertujuan untuk menyimpan dan memanipulasi informasi-informasi geografis. SIG dirancang untuk mengumpulkan, menyimpan dan menganalisa objek serta fenomena yang posisi geografisnya merupakan karakteristik yang penting untuk dianalisis (Fathansyah, 2005).
Ciri utama data yang bisa dimanfaatkan dalam Sistem Informasi Geografis adalah data yang telah terikat dengan lokasi dan merupakan data dasar yang belum dispesifikasi (Dulbahri, 1993).
Barus dan Wiradisastra (2000) juga mengungkapkan bahwa SIG adalah alat yang handal untuk menangani data spasial, dimana dalam SIG data dipelihara dalam bentuk digital sehingga data ini lebih padat dibanding dalam bentuk peta cetak, tabel atau dalam bentuk konvensional lainnya yang akhirnya akan mempercepat pekerjaan dan meringankan biaya yang diperlukan.
Aronoff (1989) menjelaskan model data vektor yang digunakan untuk merepresentasikan fitur-fitur spasial permukaan bumi, antara lain :
a. Model Data Spaghetti
Pada model vektor data spaghetti ini, data spasial ditranslasikan garis per garis ke dalam sistem koordinat kartesian XY. Sebuah titik diencoding sebagai satu pasangan koordinat XY, sebuah garis sebagai deretan pasangan koordinat XY dan area direpresentasikan oleh poligon tertutup sempurna. Perekaman batas antara poligon yang berdampingan dengan merekam titik-titik setiap segmen tersebut pada setiap poligon.
Model spaghetti sangat sederhana dan mudah dimengerti, dimana model data tersebut secara nyata merupakan peta yang diekspresikan pada koordinat kartesian walaupun model spaghetti tidak merekam relasi spasial antar fitur geografis. Misalnya untuk analisis poligon yang berdampingan harus dilakukan searching semua fitur geografis kemudian baru dihitung apakan fitur-fitur tersebut saling berdampingan atau tidak. Hal ini menyebabkan model spaghetti tidak efisien untuk analisis data spasial dalam jumlah besar.
b. Model Data Topological
Model topologi banyak digunakan untuk encoding relasi spasial pada SIG. Topologi merupakan metode matematis untuk mendefinisikan relasi spasial antar fitur geografis. Bentuk dasar model ini yaitu :
• Arc berupa susunan titik (point) yang berawal dan berakhir pada node;
• Node merupakan titik pertemuan antar dua arc atau lebih dan node juga terletak pada ujung arc;
• Poligon terdiri dari rantai tertutup arc yang merepresentasikan batas area.
Topologi direkam pada 3 (tiga) data tabel untuk arc, node, dan poligon, sedangkan data koordinat disimpan pada tabel tersendiri. Titik dan polygon disimpan pada layer yang sama, sedang garis disimpan pada layer berbeda, dimana set topologi dan tabel koordinat saling terkait dengan setiap layer data.
c. Triangulated Irregular Network (TIN)
TIN adalah model data topologi berbasis vektor untuk merepresentasikan data permukaan bumi (terrain) dalam bentuk rangkaian segitiga yang berhubungan. Pada setiap titik direkam lokasi geografis dalam koordinat XY dan elevasi dalam koordinat Z. TIN direpresentasikan pada tabel Node (menyebutkan nama segitiga dan node yang menyusunnya), tabel Edge (menyebutkan daftar tiga segitiga yang berbatasan), tabel koordinat XY dan tabel koordinat Z (menyimpan nilai koordinat tiap node).
Komponen Sistem Informasi Geografis
Menurut Prahasta (2005) Komponen-komponen pendukung SIG terdiri dari lima komponen yang bekerja secara terintegrasi yaitu perangkat keras (hardware), perangkat lunak (software), data, manusia, dan metode yang dapat diuraikan sebagai berikut:
1. Perangkat Keras (hardware)
Perangkat keras SIG adalah perangkat-perangkat fisik yang merupakan bagian dari sistem komputer yang mendukung analisis goegrafi dan pemetaan. Perangkat keras SIG mempunyai kemampuan untuk menyajikan citra dengan resolusi dan kecepatan yang tinggi serta mendukung operasioperasi basis data dengan volume data yang besar secara cepat. Perangkat keras SIG terdiri dari beberapa bagian untuk menginput data, mengolah data, dan mencetak hasil proses. Berikut ini pembagian berdasarkan proses :
Input data: mouse, digitizer, scanner
Olah data: harddisk, processor, RAM, VGA Card
2. Perangkat Lunak (software)
Perangkat lunak digunakan untuk melakukan proses menyimpan, menganalisa, memvisualkan data-data baik data spasial maupun non-spasial. Perangkat lunak yang harus terdapat dalam komponen software SIG adalah:
Alat untuk memasukkan dan memanipulasi data SIG
Data Base Management System (DBMS)
Alat untuk menganalisa data-data
Alat untuk menampilkan data dan hasil analisa
3. Data
Pada prinsipnya terdapat dua jenis data untuk mendukung SIG yaitu :
Data Spasial
Data spasial adalah gambaran nyata suatu wilayah yang terdapat di permukaan bumi. Umumnya direpresentasikan berupa grafik, peta, gambar dengan format digital dan disimpan dalam bentuk koordinat x,y (vektor) atau dalam bentuk image (raster) yang memiliki nilai tertentu.
Data Non Spasial (Atribut)
Data non spasial adalah data berbentuk tabel dimana tabel tersebut berisi informasi- informasi yang dimiliki oleh obyek dalam data spasial. Data tersebut berbentuk data tabular yang saling terintegrasi dengan data spasial yang ada.
4. Manusia
Manusia merupakan inti elemen dari SIG karena manusia adalah perencana dan pengguna dari SIG. Pengguna SIG mempunyai tingkatan seperti pada sistem informasi lainnya, dari tingkat spesialis teknis yang mendesain dan mengelola sistem sampai pada pengguna yang menggunakan SIG untuk membantu pekerjaannya sehari-hari.
5. Metode
Metode yang digunakan dalam SIG akan berbeda untuk setiap permasalahan. SIG yang baik tergantung pada aspek desain dan aspek realnya.
2.2. Pengertian Garis Lintang dan Garis Bujur
Garis lintang (latitude) dan garis bujur (longitude) adalah garis-garis khayal di permukaan bumi yang dilukis di atas peta, atlas atau bola dunia untuk membantu menunjukkan kedudukan suatu tempat. Letak dan posisi tempat dirujuk oleh titik persilangan (koordinat) antara garis lintang dengan garis bujur. Nilai garis lintang dinyatakan terlebih dahulu, kemudian diikuti oleh nilai garis bujur (Hartono, 2007).
Garis lintang adalah garis-garis paralel pada bola dunia yang sejajar dengan
Garis Ekuator. Garis lintang diukur dalam kiraan (˚) dari Garis Khatulistiwa atau
Ekuator (0˚) tanpa sudut. Garis-garis lintang utama di dunia terdiri dari Garis Khatulistiwa, Garis Sartan, Garis Jadi, Garis Artik, dan Garis Anartik. Semua garis lintang berbentuk lingkaran cincin, kecuali Kutub Utara (90˚LU) dan Kutub Selatan
(90˚LS) yang berbentuk titik untuk menggambarkan poros bumi. Jadi Lintang Utara (LU) berarti semua posisi atau tempat yang terletak di sebelah Utara Ekuator, sedangkan Lintang Selatan (LS) berarti semua tempat yang terletak di sebelah Selatan Ekuator (Hartono, 2007).
Garis bujur adalah garis-garis setengah lingkaran yang dilukis di sekeliling bola dunia dari bagian atas sampai ke bawah tegak lurus dengan garis lintang sehingga seolah-olah menghubungkan Kutub Utara dan Kutub Selatan. Hal ini juga berarti semua garis bujur bertemu antara satu sama lain di Kutub Utara dan Kutub Selatan karena setiap garis berawal dan berakhir di keduanya. Garis bujur utama (Prime
Meridien) adalah garis bujur 0˚ yang melewati kota Greenwich sebagaimana
disepakati bersama secara internasional. Garis-garis bujur di sebelah timur Meridian
diberi nilai 1˚BT hingga 180˚BT, begitu pula dengan garis-garis bujur di sebelah barat
Meridian diberi nilai 1˚BB sampai 180˚BB. Garis bujur 180˚BT dan 180˚BB adalah
2.3. Citra Satelit
Menurut Hornby (Sutanto, 1994), citra merupakan gambaran yang terekam oleh kamera atau oleh sensor lainnya. Sedangkan Simonett mengutarakan dua pengertian tentang citra yaitu : Gambaran obyek yang dibuahkan oleh pantulan atau pembiasan sinar yang difokuskan oleh sebuah lensa atau sebuah cermin. Gambaran rekaman suatu obyek (biasanya berupa gambaran pada foto) yang dibuahkan dengan cara optik, elektro-optik, optik mekanik, atau elektronik. Pada umumnya ia digunakan bila radiasi elektromagnetik yang dipancarkan atau
dipantulkan dari suatu obyek tidak langsung direkam pada film.”
(Sutanto, 1994).
Menurut Lintz Jr. dan Simonett dalam Sutanto (1994), ada tiga rangkaian kegiatan yang diperlukan dalam pengenalan obyek yang tergambar pada citra, yaitu:
1. Deteksi, adalah pengamatan adanya suatu objek, misalnya pada gambaran sungai terdapat obyek yang bukan air.
2. Identifikasi, adalah upaya mencirikan obyek yang telah dideteksi dengan menggunakan keterangan yang cukup. Misalnya berdasarkan bentuk, ukuran, dan letaknya, obyek yang tampak pada sungai tersebut disimpulkan sebagai perahu motor.
3. Analisis, yaitu pengumpulan keterangan lebih lanjut. Misalnya dengan mengamati jumlah penumpangnya, sehingga dapat disimpulkan bahwa perahu tersebut perahu motor yang berisi dua belas orang.
Berdasarkan resolusi yang digunakan, citra hasil penginderaan jarak jauh bisa dibedakan atas (Jaya, 2002):
Resolusi spasial Merupakan ukuran terkecil dari suatu bentuk (feature) permukaan bumi yang bisa dibedakan dengan bentuk permukaan disekitarnya, atau sesuatu yang ukurannya bisa ditentukan. Kemampuan ini memungkinkan kita untuk mengidentifikasi (recognize) dan menganalisis suatu objek di bumi selain mendeteksi (detectable) keberadaannya.
Resolusi spektral Merupakan dimensi dan jumlah daerah panjang gelombang yang sensitif terhadap sensor
Resolusi radiometrik Merupakan ukuran sensitifitas sensor untuk membedakan aliran radiasi (radiation flux) yang dipantulkan atau diemisikan suatu objek oleh permukaan bumi.
Resolusi Temporal Merupakan frekuensi suatu sistem sensor merekam suatu areal yang sama (revisit). Seperti Landsat TM yang mempunyai ulangan setiap 16 hari, SPOT 26 hari dan lain sebagainya
Citra, sebagai dataset, bisa dimanipulasi menggunakan algoritma (persamaan matematis). Manipulasi bisa merupakan pengkoreksian error, pemetaan kembali data terhadap suatu referensi geografi tertentu, ataupun mengekstrak informasi yang tidak langsung terlihat dari data. Data dari dua citra atau lebih pada lokasi yang sama dikombinasikan secara matematis untuk membuat composite dari beberapa dataset. Produk data ini, disebut derived products, bisa dihasilkan dengan beberapa penghitungan matematis atas data numerik mentah (DN) (Puntodewo, 2003)
2.4. Digitasi
Menurut Khomsin (2004) digitasi adalah proses untuk mengubah informasi grafis yang tersedia dalam kertas ke formal digital. Dalam prosesnya, digitasi memerlukan waktu, tenaga, biaya, dan menuntut adanya tenaga ahli yang cukup menguasai tekniknya sedangkan menurut Puntodewo (2003) digitasi citra adalah proses mengkonversi fitur-fitur spasial pada peta menjadi kumpulan koordinat x,y.
Proses digitasi secara umum dibagi dalam dua macam (Puntodewo, 2003): 1. Digitasi menggunakan digitizer.
Dalam proses digitasi ini memerlukan sebuah meja digitasi atau digitizer. 2. Digitasi onscreen di layar monitor
Digitasi onscreen paling sering dilakukan karena lebih mudah dilakukan, tidak memerlukan tambahan peralatan lainnya, dan lebih mudah untuk dikoreksi apabila terjadi kesalahan.
2.5. Karakteristik Citra Satelit Quickbird
Sensor satelit QuickBird DigitalGlobe berhasil diluncurkan 18 Oktober 2001 di Vandenberg Air Force Base, California, USA. (Digital Globe, 2014).
Menggunakan state-of-the-art BGIS 2000 sensor (PDF), satelit QuickBird mengumpulkan data gambar dari 0.65m tingkat resolusi detail piksel. Satelit ini merupakan sumber yang sangat baik dari data lingkungan berguna untuk analisis perubahan penggunaan lahan, pertanian dan iklim hutan (Digital Globe, 2014)..
Selama bulan Juni 2014 DigitalGlobe mendapat izin dari Departemen Perdagangan AS untuk mengumpulkan dan menjual citra di resolusi terbaik yang tersedia. Selain itu, enam bulan setelah WorldView-3 beroperasi DigitalGlobe akan diijinkan untuk menjual citra sampai dengan 25 cm pankromatik dan multispektral 1,0 m GSD (Digital Globe, 2014).Karakteristik citra quickbird seperti pada tabel 2.1. 2.6 Data Vektor
Dalam data vektor bumi direpresentasikan sebagai suatu mosaik garis (arcline),
polygon (daerah yang dibatasi oleh garis yang berawal dan berakhir pada titik yang
sama), titik (Edy Irwansyah, 2013).
Model data vektor merupakan model data yang paling banyak digunakan, model mi berbasiskan pada titik (points) dengan nilai koordinat (x,y) untuk
membangun obyek spasialnya. Obyek yang dibangun terbagi menjadi tiga bagian lagi yaitu berupa titik (point), garis (line), dan area (polygon) (Edy Irwansyah, 2013).
1. Titik-titik.
Entity titik meliputi semua objek grafis atau geografis yang dikaitkan dengan koordinat. Di samping koordinat-koordinat, data atau informasi yang
diasosiasikan dengan „titik‟ tersebut juga harus disimpan untuk menunjukkan
jenis titik yang bersangkutan. 2. Garis-garis atau kurva.
Entity garis dapat didefinisikan sebagai semua unsur-unsur linier yang dibangun dengan menggunakan segmen-segmen garis lurus yang dibentuk oleh dua titik koordinat atau lebih.
Tabel 2.1. Karakteristik Citra Quickbird
Launch Date October 18, 2001 Launch Vehicle Boeing Delta II
Launch Location Vandenberg Air Force Base, California, USA Orbit Altitude 450 Km / 482 Km - (Early 2013)
Orbit Inclination 97.2°, sun-synchronous
Speed 7.1 Km/sec (25,560 Km/hour)
Equator Crossing Time 10:30 AM (descending node)
Orbit Time 93.5 minutes
Revisit Time 1-3.5 days, depending on latitude (30° off-nadir) Swath Width (Nadir) 16.8 Km / 18 Km - (Early 2013)
Metric Accuracy 23 meter horizontal (CE90)
Digitization 11 bits
Resolution
Pan: 65 cm (nadir) to 73 cm (20° off-nadir)
MS: 2.62 m (nadir) to 2.90 m (20° off-nadir)
Image Bands
Pan: 450-900 nm
Blue: 450-520 nm
Green: 520-600 nm
Red: 630-690 nm
Near IR: 760-900 nm
3. Poligon/luasan beserta atribut-atributnya.
Keuntungan utama dari format data vektor adalah ketepatan dalam merepresentasikan fitur titik, batasan dan garis lurus. Hal ini sangat berguna untuk analisa yang membutuhkan ketepatan posisi, misalnya pada basis data batas-batas katasder. Kelemahan data vektor yang utama adalah ketidakmampuannya dalam mengakomodasi perubahan gradual (Puntodewo, 2003).
2.8 K Means Clustering
Pendeteksian objek pada suatu citra memerlukan suatu proses segmentasi. Segmentasi akan membagi citra menjadi beberapa bagian atau objek, bagian yang menjadi hasil dari segmentasi citra ini sangat bergantung pada apa yang diinginkan. Tujuan segmentasi yang ideal adalah mengidentifikasikan komponen dari suatu citra dan menggolongkan piksel-piksel didalamnya ke komponen yang telah ditentukan.
2.8.1 Clustering
Clustering adalah membagi data ke dalam grup-grup yang mempunyai obyek
yang karakteristiknya sama (Berkhin dan Pavel). Garcia Molina dan Hector menyatakan clustering adalah mengelompokkan item data ke dalam sejumlah kecil grup sedemikian sehingga masing-masing grup mempunyai sesuatu persamaan yang esensial.
Clustering memegang peranan penting dalam aplikasi data mining, misalnya
eksplorasi data ilmu pengetahuan, pengaksesan informasi dan text mining, aplikasi basis data spasial, dan analisis web. Clustering diterapkan dalam mesin pencari di Internet. Web mesin pencari akan mencari ratusan dokumen yang cocok dengan kata kunci yang dimasukkan. Dokumen-dokumen tersebut dikelompokkan dalam cluster-cluster sesuai dengan kata-kata yang digunakan.
Tan, dkk. membagi clustering dalam dua kelompok, yaitu hierarchical and
partitional clustering. Partitional Clustering disebutkan sebagai pembagian
obyek-obyek data ke dalam kelompok yang tidak saling overlap sehingga setiap data berada tepat di satu cluster. Hierarchical clustering adalah sekelopok cluster yang bersarang seperti sebuah pohon berjenjang (hirarki).
William membagi algoritma clustering ke dalam kelompok besar seperti berikut:
1. Partitioning algorithms: algoritma dalam kelompok ini membentuk bermacam partisi dan kemudian mengevaluasinya dengan berdasarkan beberapa kriteria.
2. Hierarchy algorithms: pembentukan dekomposisi hirarki dari sekumpulan data
menggunakan beberapa kriteria.
3. Density-based: pembentukan cluster berdasarkan pada koneksi dan fungsi
densitas.
4. Grid-based: pembentukan cluster berdasarkan pada struktur multiple-level
granularity
5. Model-based: sebuah model dianggap sebagai hipotesa untuk masing-masing
cluster dan model yang baik dipilih diantara model hipotesa tersebut.
2.8.2 Algoritma k means clustering
Algoritma K-Means diperkenalkan oleh James B MacQueen pada tahun 1967 dalam proceedings of the 5 th berkeley symposium on Mathematical Statistics and Probability (Johnson & Wichern, 1992).
Algoritma K-Means adalah metode clustering berbasis jarak yang membagi data ke dalam sejumlah cluster. Algoritma ini hanya bekerja pada atribut numerik.
Dasar pengelompokan dalam metode ini adalah menempatkan objek berdasarkan rata-rata (mean) klaster terdekat. Untuk itu digunakan Algoritma K-Means yang di dalamnya memuat aturan sebagai berikut :
1 Jumlah cluster perlu diinputkan.
2 Hanya memiliki atribut bertipe numerik.
Algoritma K-Means pada dasarnya melakukan 2 proses yakni proses pendeteksian lokasi pusat tiap cluster dan proses pencarian anggota dari tiap-tiap cluster.
Algoritma K-Means, melakukan tiga langkah utama dalam melakukan pengelompokan :
1 Menentukan koordinat titik pusat untuk masing-masing klaster. Jumlah klaster K sudah ditentukan sebelumnya, sehingga terdapat K koordinat titik pusat. Inisialisasi koordinat titik pusat dapat dilakukan secara sekuensial dengan mengambil sejumlah data pertama sebagai titik pusat, atau secara acak (random) pada sembarang nomor urut data
2 Menghitung jarak setiap objek terhadap semua titik pusat klaster
3 Mengelompokkan objek berdasarkan jarak minimum atau jarak ke titik pusat terdekat Langkah 1-3 di atas dilakukan dalam perulangan (iterasi) sampai tidak ditemukan lagi objek yang berpindah klaster akibat perhitungan kembali titik-titik pusat klaster pada iterasi terakhir
Secara sederhana algoritma K-Means dapat digambarkan dalam diagram alir pada gambar 1.
Start
Tentukan Jumlah Klaster K
Tentukan asumsi titik pusat klaster
(centroid)
Hitung Jarak Objek Ke Centroid
Kelompokkan Objek berdasarkan jarak
minimum
Adakah objek yang
berpindah? End
Gambar 2.1. Diagram Alir algoritma K Means Clustering
Algoritma K- Means memerlukan 3 komponen yaitu: 1. Jumlah Klaster
K-Means merupakan bagian dari metode non-hirarki sehingga dalam metode ini jumlah I harus ditentukan terlebih dahulu. Jumlah klaster I dapat ditentukan melalui pendekatan metode hirarki. Namun perlu diperhatikan bahwa tidak terdapat aturan khusus dalam menentukan jumlah klaster I, terkadang jumlah klaster yang diinginkan tergantung pada subjektif seseorang.
2. Klaster Awal
Berdasarkan Hartigan (1975), pemilihan klaster awal dapat ditentukan berdasarkan interval dari jumlah setiap observasi.
Berdasarkan Rencher (2002), pemilihan klaster awal dapat ditentukan melalui pendekatan salah satu metode hirarki.
Oleh karena adanya pemilihan klaster awal yang berbeda ini maka kemungkinan besar solusi klaster yang dihasil akan berbeda pula.
3. Ukuran Jarak
Dalam hal ini, ukuran jarak digunakan untuk menempatkan observasi ke dalam klaster berdasarkan sentrid terdekat. Ukuran jarak yang digunakan dalam metode K-Means adalah jarak Euclid.
Adapun algoritma K-means dalam pembentukan klaster sebagai berikut:
Misalkan diberikan matriks data X = {xij} berukuran dengan i=1,2,3,..n,
j=1,2,3,…p dan asumsikan jumlah klaster awal K
1. Tentukan sentroid.
Hitung jarak setiap objek ke setiap centroid dengan menggunakan jarak euclid atau dapat ditulis sebagai berikut:
√
Setiap objek disusun ke sentroid terdekat dan kumpulan objek tersebut akan membentuk klaster.
2. Tentukan sentroid baru dari klaster yang baru terbentuk, di mana sentroid baru itu diperoleh dari rata-rata setiap objek yang terletak pada klaster yang sama.
3. Ulangi langkah 3, jika sentroid awal dan baru tidak sama.
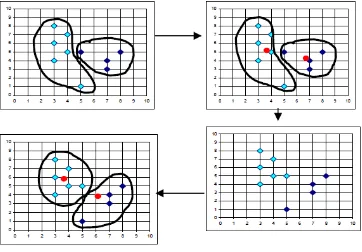
Hasil dari proses clustering yang menggunakan Metode K-Means Clustering dapat digambarkan seperti di gambar 2.2.
Gambar 2.2. Hasil dari proses clustering dengan menggunakan algoritma K-Means
Clustering.
2.8.3 Kelebihan dan Kelemahan algoritma K-means
Algoritma K-means dinilai cukup efisien, yang ditunjukkan dengan kompleksitasnya O(tkn), dengan catatan n adalah banyaknya obyek data, k adalah jumlah cluster yang dibentuk, dan t banyaknya iterasi. Biasanya, nilai k dan t jauh lebih kecil daripada nilai n. Selain itu, dalam iterasinya, algoritma ini akan berhenti dalam kondisi optimum lokal (William dan Graham).
Memperhatikan input dalam algoritma K-Means, dapat dikatakan bahwa algoritma ini hanya mengolah data kuantitatif. Hal tersebut juga diungkapkan oleh Berkhin , bahwa algoritma K-means hanya dapat mengolah atribut numerik.
Sebuah basis data, tidak mungkin hanya berisi satu macam type data saja, akan tetapi beragam type. William menyatakan sebuah basis data dapat berisi data-data dengan type sebagai berikut: symmetric binary, asymmetric binary, nominal, ordinal,
interval dan ratio. Sedangkan Pal dan Mitra menyebutkan sebuah basis data dapat
berisi data-data teks, simbol, gambar dan suara(Pal, Shankar K dan Mitra). 2.9 Median Filtering
Konsep dasarnya adalah dengan menemukan nilai pixel yang memiliki nilai intensitas dari suatu pixel yang berbeda dengan nilai pixel yang ada di daerah sekitarnya, dan menggantinya dengan nilai yang lebih cocok. (Davies, 1990).
Sesuai dengan namanya, median filter merupakan suatu metode yang menitik beratkan pada nilai median atau nilai tengah dari jumlah total nilai keseluruhan pixel yang ada di sekelilingnya. Dimisalkan terdapat data A=1, B=5, C=2, D=9, dan E=7, maka median filter akan mencari nilai tengah dari semua data yang telah diurutkan terlebih dahulu dari yang paling kecil hingga pada data yang paling besar dan kemudian diambil nilai tengahnya (1, 2, 5, 7, 9). Median dari deret tersebut adalah 5.
Pemrosesan median filter ini dilakukan dengan cara mencari nilai tengah dari nilai pixel tetangga yang mempengaruhi pixel tengah. Teknik ini bekerja dengan cara mengisi nilai dari setiap pixel dengan nilai median tetangganya. Proses pemilihan median ini diawali dengan terlebih dahulu mengurutkan nilai-nilai pixel tetangga, baru kemudian dipilih nilai tengahnya (Gambar 2.3).
Gambar 2.3. Block Diagram Alur Kerja Median Filter
Pengurutan akan menghasilkan nilai dari yang terkecil sampai nilai yang terbesar
sesuai dengan P(1) < P(2) < P(3) < P(n), sedangkan nilai m sesuai dengan rumus dimana n bernilai ganjil.
Gambar 2.4. Contoh Penerapan Median Filter
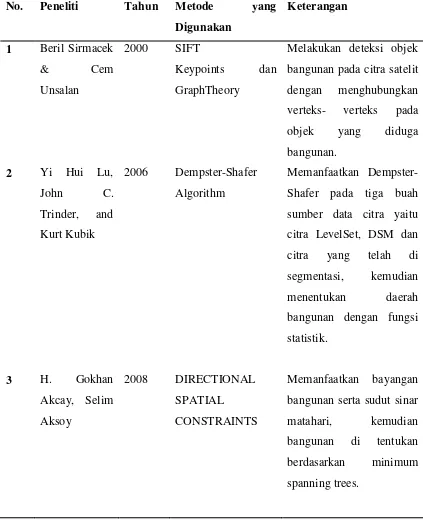
Tabel 2.2 Penelitian Terdahulu
Keypoints dan GraphTheory
Melakukan deteksi objek bangunan pada citra satelit dengan menghubungkan verteks- verteks pada objek yang diduga
2006 Dempster-Shafer Algorithm segmentasi, kemudian menentukan daerah bangunan dengan fungsi statistik.
3 H. Gokhan
Akcay, Selim Aksoy
2008 DIRECTIONAL SPATIAL
CONSTRAINTS
Memanfaatkan bayangan bangunan serta sudut sinar matahari, kemudian bangunan di tentukan berdasarkan minimum spanning trees.
BAB 3
ANALISIS DAN PERANCANGAN SISTEM
Bab ini membahas analisis metode K-Means Clustering pada sistem dan membahas tahap-tahap yang dilakukan pada sistem yang akan dibangun.
3.1 Data Yang Digunakan
Data yang digunakan dalam penelitian ini adalah data citra hasil rekaman satelit Quickbird yang didapat dari internet.
3.2 Analisis Sistem
Analisis diperlukan sebagai dasar perancangan sistem. Pada penelitian ini, terdapat lima tahap proses yaitu tahap segmentasi menggunakan metode k-means clustering, tahap median filtering, tahap pengenalan ciri bangunan, tahap pengenalan koordinat, dan penyusunan polygon bangunan.
Adapun tahapan dari segmentasi menggunakan metode k-means clustering
yaitu sebagai berikut:
1. Masukkan file citra quickbird. 2. Inisialisasi jumlah klaster.
3. Mulai pembacaan data dan kembalikan sebagai byte array array dua dimensi.
4. Dengan menggunakan persamaan (3.1), hitung jarak setiap objek ke setiap centroid
√ (3.1)
6. Hitung sentroid baru dari klaster yang baru terbentuk, di mana sentroid baru itu diperoleh dari rata-rata setiap piksel yang terletak pada klaster yang sama 7. Hasil dari tahapan segmentasi yaitu citra baru dengan dua klaster, yaitu klaster
putih untuk bangunan dan klaster hitam untuk objek lainnya.
Adapun median filtering yang digunakan adalah median filtering dengan matriks 4x4, tahapan dari median filtering yaitu sebagai berikut :
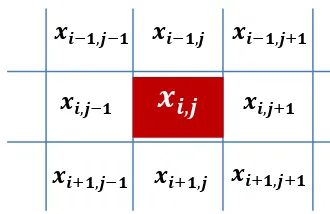
1. Untuk setiap piksel X,Y pada citra, buat sebuah matriks berukuran 4x4 seperti gambar 3.1
[
]
Gambar 3.1 Matriks untuk median filtering 4x4
2. Urutkan setiap nilai pada matriks seperti gambar 3.1 secara ascending
3. Ganti nilai pada piksel X,Y dengan nilai tengah (median) dari matriks seperti gambar 3.1.
Adapun tahapan dari pengenalan ciri bangunan yaitu sebagai berikut:
1. Inisialisasi jumlah minimum panjang, dan minimum lebar toleransi objek bangunan.
2. Deklarasikan array integer dua dimensi dengan panjang sesuai dengan panjang citra, serta lebar sesuai lebar citra.
3. Untuk setiap piksel citra, representasikan piksel warna putih dengan nilai 1 pada array, kemudian piksel warna hitam dengan nilai 0.
4. Lakukan seleksi untuk setiap piksel yang terhubung, seperti pada gambar 3.2 5. Hapus setiap piksel yang tidak memenuhi minimum panjang dan lebar
terhubung secara bertikal maupun horizontal.
6. Hasil dari tahapan pengenalan ciri bangunan yaitu citra baru dengan pola bangunan yang lebih rapi.
Panjang Piksel yang terhubung horizontal >= nilai minimum lebar bangunan {
}
Gambar 3.2. Proses seleksi piksel yang terhubung
Adapun tahapan dari pengenalankoordinat yaitu sebagai berikut:
1. Lakukan pengenalan koordinat asli pada citra, dengan cara mengklik pada citra 2. Simpan nilai koordinat x,y pada sebuah array list.
3. Hitung jarak koordinat asli hasil inputan dengan koordinat citra pada monitor dengan persamaan (3.2) dan persamaan (3.3)
Px = ∑ (3.2)
5. Hasil dari tahapan pengenalan koordinat yaitu citra baru dengan koordinat lintang dan bujur.
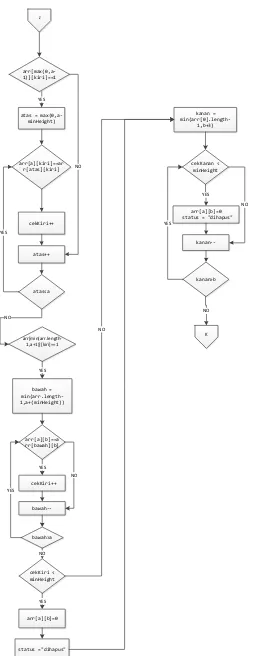
Adapun tahapan dari penyusunan polygon bangunan bertujuan untuk membentuk urutan koordinat agar dapat di simpan sebagai tipe data vektor berbentuk polygon. Tahapan penyusunan polygon bangunan menggunakan metode Fillgrid, yaitu sebagai berikut:
1. Untuk setiap array bernilai 1, temukan array bernilai 1 yang berdekatan dengannya, seperti pada gambar 3.3.
Gambar 3.3. Metode Fillgrid untuk mencari piksel bernilai 1
2. Cari piksel bernilai 1 dengan prioritas seperti pada gambar 3.4.
Gambar 3.4. Prioritas pencarian piksel bernilai 1
3. Setelah ditemukan piksel bernilai 1, pindahkan pointer pencarian ke piksel yang baru tersebut.
4. Apabila ada lebih dari satu piksel sekitar yang bernilai 1, pindahkan pointer sesuai dengan prioritas pencarian pada gambar 3.3, kemudian set nilai Boolean cabang true, dan simpan piksel cabang yang lain ke dalam array list bernama data cabang.
5. Apabila tidak ada lagi piksel bernilai 1 disekitar, dan Boolean cabang = true, kembalikan lagi pointer ke percabangan yang disimpan pada array list data cabang.
6. Ulangi mulai dari langkah 1, hingga tidak ada lagi piksel bernilai 1 pada sekitar atau piksel bernilai 1 berikutnya adalah piksel titik mulai.
7. Hasil dari tahapan penyusunan polygon bangunan adalah polygon bangunan yang siap untuk disimpan sebagai data vektor geografis.
Start
mean = 255 *bins-1/index NO
Lowerbounds[i]=Math.max((mean + classes.get(i).getMean())/2,
currentBound);
Upperbounds[i]= Math.min((mean + classes.get(i).getMean())/2,
Start
b = a+1 matriks[a]>matriks[b]
temp = matriks[a]
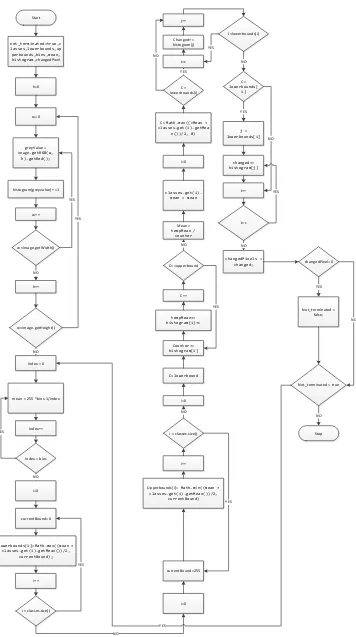
Gambar 3.6 Flowchart tahapan median filtering
A
w++
w<image.getWidth()
b=0
NO
a=0
cekKanan=0; cekKiri=0;
arr[b][a]=1
arr[b][max(0,a-1)]=1
YES
kiri = max(0,a-minWidth)
YES
arr[b][a]=arr[b][kiri] && arr[b][kiri+1]=1
cekKiri++
YES
B
NO NO
YES
Gambar 3.7. Flowchart tahapan pengenalan ciri bangunan (lanjutan)
cekKanan+cekKiri+1 <
Gambar 3.7. Flowchart tahapan pengenalan ciri bangunan (lanjutan)
status = "dihapus" cekAtas + cekBawah <
minWidth
YES
arr[b][a]=0;
status = "dihapus"
arr[b][a]=0
y--y>b
a++
NO
a<arr[b].length
b++
NO
b<arr.length
J NO
G
E F
I
YES H
cekAtas < minHeight
NO
Gambar 3.7. Flowchart tahapan pengenalan ciri bangunan (lanjutan)
J cekAtas + cekBawah
J status = "dihapus"
YES
Gambar 3.7. Flowchart tahapan pengenalan ciri bangunan (lanjutan)
status = "hapus"
a++
a<arr.length
b++
NO
b<arr[0].length
y=0
YES
x=0
arr[y][x]!=1
hasil.setRGB(x,y, 0)
YES
x++
x<arr[y].length
YES
y++
NO
y<arr.length
YES
Stop NO
K L M
NO
NO
Start
x,y,data,dataDigit,
lon,lat
Datadigit.add(x, y,lon,lat)
x=0
Gambar 3.8 Flowchart tahapan pengenalan koordinat
arr[tempY][min(tem
Gambar 3.9 Flowchart tahapan penyusunan polygon bangunan (lanjutan)
3.3 General Architecture
Menurut Presman (2010), desain arsitektur dari suatu sistem merepresentasikan struktur data dan komponen program yang diperlukan dalam membangun sebuah sistem. Desain arsitektur sangat penting dalam menggambarkan proses dan interaksi antar komponen dalam suatu sistem. Rancangan keseluruhan sistem yang akan dibuat dalam bentuk arsitektur umum yang dapat dilihat pada gambar 3.10.
Citra Quickbird
Citra Quickbird
Segmentasi
Baca File Citra dan kembalikan sebagai array integer dalam
histogram[]
Lakukan segmentasi menggunakan metode
k-means clustering Tentukan jumlah cluster
kemudian simpan dalam bins
Ratakan nilai piksel citra dengan menghitung nilai median dari matriks 4x4 disekitar tiap-tiap piksel
Median Filtering
Ganti nilai tiap-tiap piksel dengan nilai median tersebut
Pengenalan Ciri Bangunan
Hitung nilai minimum lebar bangunan
Hitung minimum nilai panjang bangunan
Hapus objek yang tidak sesuai kriteria panjang dan lebar bangunan
Pengenalan Koordinat
Hitung proyeksi koordinat dari layar
Translasikan koordinat layar terhadap proyeksi
Penyusunan Polygon Bangunan
Baca file hasil median filtering, kembalikan data dalam bentuk array 2 dimensi, piksel putih bernilai 1, pisel hitam bernilai 2
Metode Fillgrid
File data vektor berformat geografis hasil
Gambar 3.10 General Architecture
Penjelasan dari komponen-komponen yang terdapat pada
general architecture adalah sebagai berikut:
a. File citra quickbird digunakan sebagai masukan pada sistem.
b. citra quickbird kemudian dibaca oleh sistem dan diuraikan menjadi sebuah
d. Citra hasil segmentasi dikembalikan dan ditampilkan pada sistem.
e. Nilai piksel pada citra diratakan dengan menghitung nilai median dari matriks 4x4 pada setiap tetangga dari piksel.
f. Nilai piksel diganti dengan hasil perhitungan median.
g. Citra hasil perataan dengan median filtering dikembalikan pada sistem dan ditampilkan.
h. Citra hasil median filtering di simpan pada array integer dua dimensi bernama arr[][], dengan catatan piksel berwarna putih disimpan sebagai integer bernilai satu dan piksel berwarna hitam disimpan sebagai integer bernilai 0.
i. Array arr[][] ditelusuri dan setiap piksel yang tidak memenuhi kriteria minimal
panjang dan lebar piksel yang saling terhubung dihapus (pada citra diberi nilai piksel = 0).
j. Citra dikembalikan dalam bentuk yang lebih rapi sesuai kriteria panjang dan lebar kemudian ditampilkan di sistem.
k. Citra dikenalkan terhadap koordinat nyata dengan cara user mengklik secara sembarang pada citra dan memasukkan nilai longitude (bujur) dan latitude
(lintang).
l. Nilai koordinat nyata hasil inputan ditranslasikan terhadap koordinat citra pada layar.
m. Setiap piksel yang terhubung ditelusuri sisi-sisinya dan disusun menjadi polygon dengan memanfaatkan metode fillgrid.
3.4 Perancangan Tampilan Antarmuka
Antarmuka pengguna (user interface) merupakan media yang menjembatani komunikasi antara manusia dan komputer. Perancangan antarmuka bertujuan untuk memberikan gambaran umum tampilan dari aplikasi yang akan dibuat. Pada tampilan antarmuka aplikasi akan ditampilkan panel citra dan panel tombol.
Keterangan:
a. Panel citra terletak di bagian bawah main window berisi kanvas untuk menampilkan citra masukan maupun hasil proses oleh sistem.
Gambar 3.11 Rancangan Jendela Utama (Main Window)
b. Panel menu terletak di bagian atas main window berisi menu-menu yang
BAB 4
IMPLEMENTASI DAN PENGUJIAN
Pada bab ini akan dijelaskan implementasi dari k means clustering sesuai perancangan yang telah dijelaskan pada bab 3 serta melakukan pengujian dari sistem yang telah dibuat.
4.1 Implementasi Sistem
Sesuai dengan hasil analisis dan perancangan yang telah dibuat, k means clustering
akan diimplementasikan ke dalam sebuah sistem dengan menggunakan bahasa pemrograman Java.
4.1.1 Spesifikasi hardware dan software yang digunakan
Spesifikasi perangkat keras dan perangkat lunak yang digunakan untuk membangun sistem adalah sebagai berikut:
1. ProcessorIntel® Core™ i5-2430M CPU @ 2.40GHz
2. Kapasitas hard disk 320 GB
3. Memory RAM yang digunakan 4 GB
4. Sistem operasi yang digunakan adalah Microsoft Windows 7 Ultimate 64-bit 5. Eclipse IDE INDIGO
4.1.2 Implementasi perancangan antarmuka
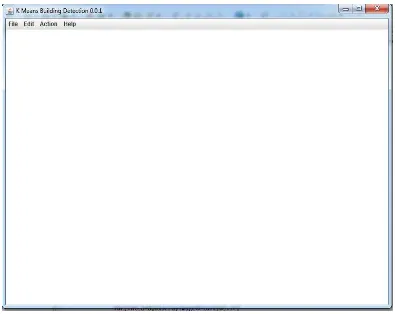
a. Jendela utama (main window)
Jendela utama merupakan jendela yang muncul ketika aplikasi dijalankan. Pada jendela ini akan ditampilkan panel menu dan panel citra. Tampilan jendela utama dapat dilihat pada gambar 4.1.
Gambar 4.1 Tampilan Jendela Utama (main window)
4.2 Pengujian Sistem
Pengujian sistem bertujuan untuk mengantisipasi kemungkinan terjadinya error yang terjadi pada komponen ataupun pada interface dari suatu program. Hal ini dilakukan dengan menguji apakah sistem tersebut telah memenuhi functional requirement dan
non-functional requirement (Sommerville, 2004).
Metode pengujian yang diterapkan pada penelitian ini adalah metode black box
atau functional testing. Pada metode black box, pengujian tidak dilakukan pada source code, tetapi hanya berfokus pada kebutuhan fungsional sistem berdasarkan input dan
4.2.1 Rencana pengujian sistem
Rancangan pengujian sistem yang akan diuji dengan teknik black box dapat dilihat pada tabel 4.1.
Tabel 4.1 Rencana Pengujian Sistem
Komponen Sistem yang Diuji Butir Uji
Jendela Utama Tombol “Open” Kanvas Citra
Tombol “K Means Clustering”
Tombol “Median Filtering”
Tombol “Gambar Ulang”
Tombol “Digitasi”
Tombol “Export”
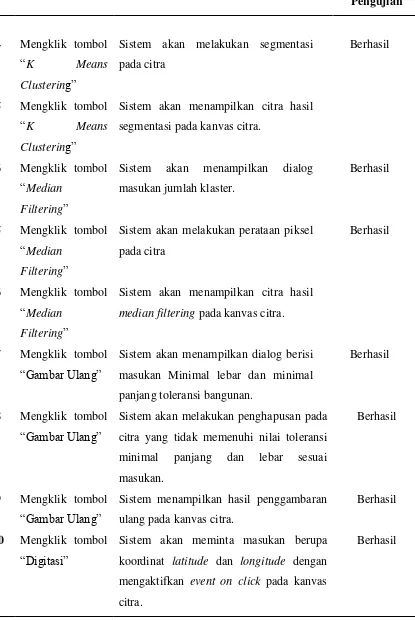
4.2.2 Kasus dan hasil pengujian sistem
Adapun kasus dan hasil pengujian sistem dengan menggunakan teknik black box
berdasarkan tabel 4.1 adalah sebagai berikut: a. Jendela Utama
Tabel 4.2 akan dijelaskan skenario pengujian sistem dalam jendela utama. Tabel 4.2 Hasil Pengujian Komponen
No. Skenario Uji Hasil yang Diharapkan Hasil
Pengujian
1. Mengklik tombol “Open”. Sistem akan menampilkan jendela pemilihan file citra dan memungkinkan pemilihan file citra.
Berhasil
2. Mengklik tombol “Open”. Sistem akan menampilkan citra dalam kanvas citra.
Berhasil
3 Mengklik tombol “K Means
Clustering”
Sistem akan menampilkan dialog masukan jumlah klaster.
Tabel 4.2 Hasil Pengujian Komponen (lanjutan)
No. Skenario Uji Hasil yang Diharapkan Hasil Pengujian
4 Mengklik tombol
“K Means
Clustering”
Sistem akan melakukan segmentasi pada citra
Berhasil
5 Mengklik tombol
“K Means
Clustering”
Sistem akan menampilkan citra hasil segmentasi pada kanvas citra.
6 Mengklik tombol
“Median
Filtering”
Sistem akan menampilkan dialog masukan jumlah klaster.
Berhasil
5 Mengklik tombol
“Median
Filtering”
Sistem akan melakukan perataan piksel pada citra
Berhasil
6 Mengklik tombol
“Median
Filtering”
Sistem akan menampilkan citra hasil
median filtering pada kanvas citra.
7 Mengklik tombol
“Gambar Ulang”
Sistem akan menampilkan dialog berisi masukan Minimal lebar dan minimal panjang toleransi bangunan.
Berhasil
8 Mengklik tombol
“Gambar Ulang”
Sistem akan melakukan penghapusan pada citra yang tidak memenuhi nilai toleransi minimal panjang dan lebar sesuai masukan.
Berhasil
9 Mengklik tombol
“Gambar Ulang”
Sistem menampilkan hasil penggambaran ulang pada kanvas citra.
Berhasil
10 Mengklik tombol
“Digitasi”
Sistem akan meminta masukan berupa koordinat latitude dan longitude dengan mengaktifkan event on click pada kanvas citra.
Tabel 4.2 Hasil Pengujian Komponen (lanjutan)
No. Skenario Uji Hasil yang Diharapkan Hasil Pengujian
11 Mengklik pada kanvas citra
Sistem akan memunculkan dialog masukan berupa latitude dan longitude citra.
Berhasil
12 Mengklik tombol
“export”
Sistem akan menampilkan dialog berisi masukan nama database, nama username. Password, serta nama tabel.
Berhasil
13 Mengklik tombol
“export”
Sistem akan menyimpan data hasil deteksi bangunan ke dalam basisdata postgresql.
Berhasil
4.2.3 Pengujian kinerja sistem
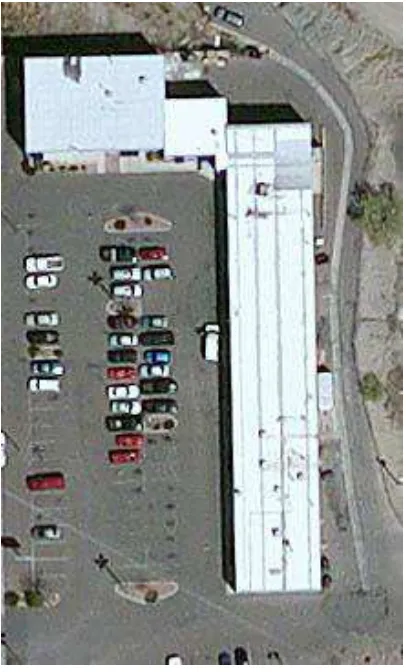
Misalkan terdapat sebuah data citra berupa file jpg seperti pada gambar 4.2.
Gambar 4.2 Citra satelit
Langkah-langkah digitasi bangunan menggunakan k means clustering untuk data pada gambar 4.2 adalah sebagai berikut:
1. Lakukan segmentasi untuk membuang objek yang bukan merupakan objek bangunan memanfaatkan metode k means clustering dengan jumlah klaster dua. Hasil segmentasi seperti pada tabel 4.3, sementara hasil proses citra seperti pada gambar 4.3.
Tabel 4.3 Data hasil pengolahan k means clustering
Loops Mean Klaster 1 Mean Klaster 2 Changed Pixel
1 103 198 8054
2 106 205 3346
3 107 209 1653
4 108 211 890
5 108 212 281
6 109 212 286
7 109 212 0
2. Lakukan perataan piksel dengan menggunakan metode median filtering. Hasil perataan piksel dengan median filtering seperti pada tabel 4.4.
Tabel 4.4. Tabel hasil median filtering
Loops Matriks 4x4 Matriks 4x4 setelah
Gambar 4.4. Hasil median filtering
3. Lakukan gambar ulang dengan menghapus piksel terhubung yang tidak memenuhi toleransi minimal jumlah piksel terhubung secara horizontal (minimum lebar) dan minimal jumlah piksel terhubung secara vertical (minimum panjang). Hasil gambar ulang seperti pada gambar 4.5.
4. Lakukan pengenalan koordinat dengan melakukan translasi koordinat terhadap koordinat hasil inputan (latitude dan longitude) yang dimasukkan. Hasil pengenalan koordinat seperti pada tabel 4.5.
Tabel 4.5. Hasil Pengenalan Koordinat
Longitude Latitude Koordinat
X Kanvas
Tabel 4.6. Hasil Translasi Koordinat
Gambar 4.6 Objek Bangunan Yang Telah Dikenali Koordinatnya Dibuka Dengan
Aplikasi Sistem Informasi Geografis. 4.2.4 Evaluasi Hasil
Evaluasi hasil dilakukan dengan membandingkan hasil digitasi dengan menggunakan system dan hasil digitasi secara manual seperti pada gambar 4.7. Evaluasi hasil dihitung berdasarkan tiga buah parameter yaitu akurasi, ketepatan, dan kualitas.
a. Kelengkapan dan ketepatan
Gambar 4.7. Hasil digitasi secara manual
Gambar 4.8. Bentuk Pengujian Akurasi dan Ketepatan
Piksel false positive piksel hasil digitasi secara otomatis oleh sistem yang tidak tepat menurut hasil digitasi secara manual. Piksel true positive
adalah piksel hasil digitasi oleh sIstem yang tepat, sedangkan piksel false
False Positive
False Negative True Positive
Digitasi Sistem
Digitasi Manual
negative merupakan setiap piksel hasil digitasi manual yang tidak di deteksi oleh sistem.
Kelengkapan =
………. (persamaan 4.3)
Ketepatan =
………. (persamaan 4.4)
TP = true positive
FN = false negative
FP = false positive
b. Kualitas
Kualitas merupakan persentase kesesuaian dari hasil akhir digitasi, yaitu persentase jumlah piksel yang di digitasi secara tepat dan akurat.
Kualitas =
………. (persamaan 4.5)
Hasil dari pengukuran evaluasi hasil seperti pada tabel 4.7. Tabel 4.7. Hasil Evaluasi Hasil
Citra Kelengkapan Ketepatan Kualitas
1 0.99025 0.98518 0.97572
2 0.98823 0.89597 0.88651
3 0.94737 0.87378 0.83334
4 0.99681 0.99797 0.99480
5 0.95712 0.69415 0.67321
6 0.96511 0.87762 0.85064
7 0.86775 0.93957 0.82188
sebesar 0.88651. Gambar 4.13 menunjukkan hasil digitasi objek bangunan citra gambar 4.12 , setelah hasil digitasi otomatis dibandingkan dengan digitasi manual seperti pada gambar 4.14, didapat nilai kelengkapan sebesar 0.94737, ketepatan sebesar 0.87378 dan kualitas sebesar 0.83334.
Gambar 4.9. Citra 2
Gambar 4.10. Hasil Digitasi otomatis citra 2
Gambar 4.11. Hasil Digitasi manual citra 2
Gambar 4.12. Citra 3
Gambar 4.13. Hasil digitasi otomatis Citra 3.
Gambar 4.14. Hasil digitasi manual Citra 3.
Gambar 4.19 menunjukkan hasil digitasi objek bangunan citra gambar 4.18, setelah hasil digitasi otomatis dibandingkan dengan digitasi manual seperti pada gambar 4.20, didapat nilai kelengkapan sebesar 0.95712, ketepatan sebesar 0.69415 dan kualitas sebesar 0.67321.
Gambar 4.15. Citra 4.
Gambar 4.17. Hasil digitasi manual citra 4.
Gambar 4.18. Citra 5.
Gambar 4.19. Hasil digitasi manual citra 5.
Gambar 4.20. Hasil digitasi otomatis citra 5
Gambar 4.21. Hasil digitasi otomatis citra 6
Gambar 4.22. Hasil digitasi otomatis citra 6
. Gambar 4.23. Hasil digitasi otomatis citra 6
Gambar 4.25 menunjukkan hasil digitasi objek bangunan citra gambar 4.24, setelah hasil digitasi otomatis dibandingkan dengan digitasi manual seperti pada gambar 4.26, didapat nilai kelengkapan sebesar 0.86775, ketepatan sebesar 0.93957 dan kualitas sebesar 0.82188.
Gambar 4.24. Citra 7
Gambar 4.26. Hasil digitasi manual gambar 7