DAFTAR PUSTAKA
Bejo, Agus. 2005. C & AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroler ATMega8535 . Edisi Pertama. Yogyakarta: Penerbit Gava Media.
Clayton George, Winder Steve. 2004. Operational Amplifiers, Edisi Kelima, Penerbit Erlangga, Jakarta.
Heryanto, M.Ary dan Wisnu Adi. 2008.Pemrograman Untuk Mikrokontroler ATMEGA 8535.Yogyakarta: ANDI.
Malvino, A. P. 1992. Prinsip-prinsip Elektronika. Jakarta: Erlangga.
Malvino, Albert paul, 2003. Prinsip-prinsip Elektronika, Jilid 1 & 2, Edisi Pertama, Penerbit: Salemba Teknika, Jakarta.
BAB III
PERANCANGAN ALAT DAN PROGRAM
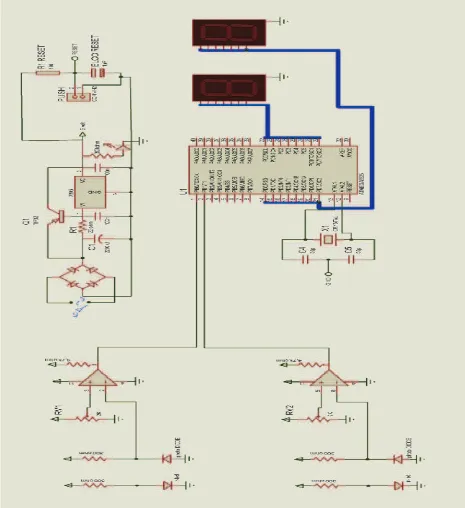
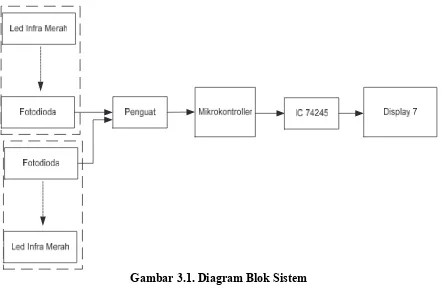
3.1 Diagram Blok Rangkaian
Gambar 3.1. Diagram Blok Sistem
Dari diagram blok di atas menggambarkan bahwa sistem yang penulis rancang akan menghitung cacahan nilai objek yang lewat. System teridiri dari led infra merah dan fotodioda untuk mendeteksi obyek yang lewat
fotodioda akan menjadi sangat kecil sehingga tidak akan mengeluarkan tegangan atau dalam kondisi low (0 volt), kondisi low tersebut akan diteruskan oleh komparator yang memastikan sinyal yang dikirim ke mikrokontroller benar-benar low (0 volt), setelah masuk ke mikro, maka sinyal tersebut akan diolah untuk menaikkan nilai pada seven segment sebesar 1 digit, begeti seterusnya
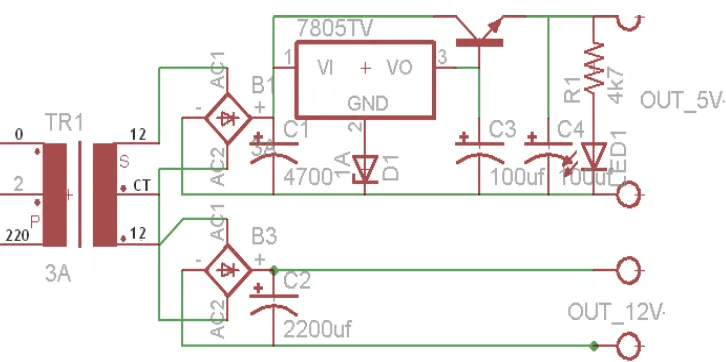
3.2 Rangkaian Power Supply
Gambar 3.2. Rangkaian Power Supply
penguat arus apabila terjadi kekurangan arus pada rangkaian, sehingga regulator tegangan (LM7805CT) tidak akan panas ketika rangkaian butuh arus yang cukup besar. Tegangan 12 volt DC langsung diambil dari keluaran jembatan dioda.
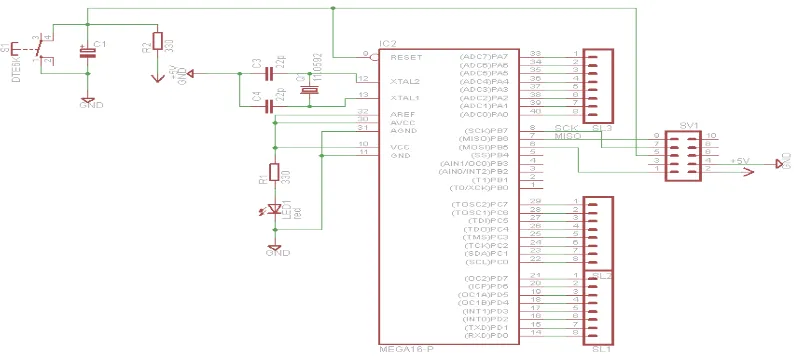
3.3 Rangkaian Mikrokontroler ATMega8535
ATmega8535 adalah mikrokontroler CMOS 8-bit daya-rendah berbasis arsitektur RISC yang ditingkatkan. Kebanyakan instruksi dikerjakan pada satu siklus clock, ATmega8535 mempunyai throughput mendekati 1 MIPS per MHz membuat disainer sistem untuk mengoptimasi komsumsi daya versus kecepatan proses.
Gambar 3. 3. Rangkaian Skematik Minimum Mikrokontroler ATMega 8535
Rangkaian skematik dan layout PCB sistem minimum Mikrokontroler ATMega 8535 dapat dilihat pada gambar di atas. Pin 12 dan 13 dihubungkan ke XTAL 12 MHz dan dua buah kapasitor 30 pF. XTAL ini akan mempengaruhi kecepatan mikrokontroler ATMega8535 dalam mengeksekusi setiap perintah dalam program. Pin 9 merupakan masukan reset (aktif rendah). Pulsa transisi dari tinggi ke rendah akan me-reset mikrokontroler ini.
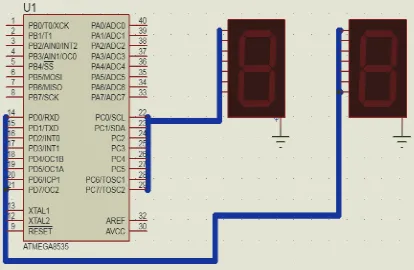
3.5 Rangkaian penampil seven segment
Seven segment adalah susunan dari beberapa led yang kemudian disusun sedemikian rupa sehingga dapat menampilkan angka-angka desimal, rangkaian seven segment yang dihubungkan dengan mikrokontroller dapat dilihat pada gambar berikut:
Gambar 3.5. Rangkaian Penampil Seven Segment
Pada rangkaian diatas, masing-masing pin seven segment di hubungkan langsung dengan pin-pin pada mikrokontroller, sedangkan jenis 7-segment nya sendiri adalah common-cathoda, yang artinya apabila diberi logika low atau tegangan 0 volt, maka segment pada 7-segment akan hidup
3.6 Flowchart Program
Penjelasan Flowchart :
- Pertama-tama mikrokontroler menginisialisasi port-port yang akan digunakan untuk keperluan pembacaan sensor dan port untuk menampilkan ke seven segment.
- Setelah selesai inisilisasi maka sensor fotodioda sudah dapat mengirimkan sinyal yang akan dihasilkan sebelum menuju ke mikrokontroller
- Sinyal dari penguat akan diteruskan ke pin input yang dimiliki oleh mikrokontroler ATMega 8535.
BAB IV
PENGUJIAN RANGKAIAN DAN ANALISA PROGRAM
4.1 Pengujian Rangkaian
4.1.1 Pengujian Rangkaian Power Supply
Pengujian rangkaian power supply ini bertujuan untuk mengetahui tegangan yang dikeluarkan oleh rangkaian tersebut, dengan mengukur tegangan keluaran dari power supply menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Dengan begitu dapat dipastikan apakah terjadi kesalahan terhadap rangkaian atau tidak. Jika diukur, hasil dari keluaran tegangan tidak murni sebesar +9 Volt dan +12 Volt, tetapi +8.97Volt dan +12.03 Volt. Hasil tersebut dikarenakan beberapa faktor, diantaranya kualitas dari tiap-tiap komponen yang digunakan nilainya tidak murni. Selain itu, tegangan jala-jala listrik yang digunakan tidak stabil.
4.1.2 Pengujian Rangkaian Sensor dan Penguat
Untuk menguji rangkaian ini adalah dengan cara memancerkan sinar infra merah ke photodioda secara langsung dang melihat hasil outputnya. Pada rangkaian penerima, Fotodioda dioperasikan pada bias balik, dimana fotodioda ini akan memiliki hambatan besar jika tidak terkena sinar infra merah, dan hambatannya akan berubah menjadi kecil jika terkena sinar infra merah tergantung dari besarnya intensitas yang mengenainya. Semakin besar intensitasnya, maka hambatannya semakin kecil. Pada rangkaian, output dari fotodioda diumpankan sistem komparator lm324.
Jika ada sinar infra merah yang mengenai fotodioda, maka hambatan pada fotodioda akan kecil, sehingga tegangan V- akan kecil. Misal tahanan photodiode mengecil menjadi 10 kOhm. Maka dengan teorema pembagi tegangan:
V- = Rrx/(Rrx + R2) x Vcc
V- = 10 / (10+10) x Vcc
V- = (1/2) x 5 Volt
V- = 2.5 Volt
Sedangkan jika tahanan photodiode besar ,maka tegangan V- akan besar (mendekati nilai Vcc). Misal tahanan photodiode menjadi 150 kOhm. Maka dengan teorema pembagi tegangan:
V- = Rrx/(Rrx + R2) x Vcc
V- = 150 / (150+10) x Vcc
V- = (150/160) x 5 Volt
V- = 4.7 Volt
Sekarang kita akan melihat trimpot. Trimpot adalah komponen pembagi tegangan dengan mengubah nilai resistansi yang ada di dalamnya. Dalam rangkaian ini maka nilai trimpot akan berkisar antara 5 Volt sampai 0 Volt. Nilai tegangan trimpot ini akan mempengaruhi nilai V+yang diterima komparator sebagai nilai referensi komparator.
Misal kita mengatur besar V+ dengan cara memutar putaran pada trimpot hingga dihasilkan tegangan sebesar 3.5 Volt.Pada saat intensitas infrared besar yang mengakibatkan tahanan Photodiode mengecil menjadi 10 kOhm dan mengakibatkan V- = 2.5 Volt maka output komparator menjadi 5 Volt.Pada saat intensitas infrared kecil yang mengakibatkan tahanan Photodiode membesar menjadi 150 kOhm dan mengakibatkan V- = 4.7 Volt maka output komparator menjadi 0 Volt.
Penghubungan Output komparator dengan Vcc bertujuan sebagai rangkaian PullUp. Hal ini dikarenakan arus yang keluar dari komparator begitu kecil sehingga walaupun memiliki nilai tegangan sebesar 5 Volt tidak dapat diterima beban (dalam rangkaian diatas beban adalah LED). Dengan penambahan Vcc,ketika tegangan output dari komparator berniali 0 Volt maka arus dari Vcc lebih banyak memilih mengalir menuju output komparator yang bernilai 0 Volt dan tanpa beban.ketika tegangan output dari komparator bernilai 5 Volt maka arus dari Vcc akan banyak mengalir menuju LED kemudian ke ground yang mengakibatkan LED menyala
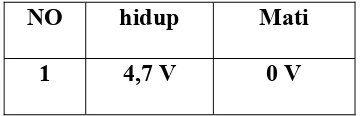
LED akan menyala jika sensor menerima sinar infra merah, dan akan mati jika sensor tidak menerima sinar infra merah.
NO hidup Mati
1 4,7 V 0 V
Tabel 4.1. Tegangan Fotodioda
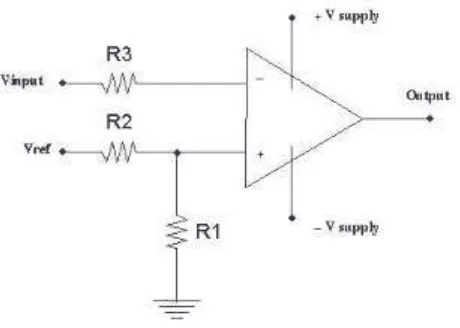
Secara sngkat, maka prinsip kerja dari komparator dapat dijelaskan sebagai berikut:
Gambar 4.1. Komparator Sederhana
Vref di hubungkan ke +V supply, kemudian R1 dan R2 digunakan sebagai pembagi tegangan, sehingg nilai tegangan yang di referensikan pada masukan + op-amp adalah sebesar :
V = [R1/(R1+R2) ] * Vsupply
Op-amp tersebut akan membandingkan nilai tegangan pada kedua masukannya, apabila masukan (-) lebih besar dari masukan (+) maka, keluaran op-amp akan menjadi sama dengan – Vsupply, apabila tegangan masukan (-) lebih kecil dari masukan (+) maka keluaran op-amp akan menjadi sama dengan + Vsupply.
Jadi dalam hal ini jika Vinput lebih besar dari V maka keluarannya akan menjadi – Vsupply, jika sebaliknya, Vinput lebih besar dari V maka keluarannya akan menjadi + Vsupply.
+Vin ≥−Vin maka Vo = Vsat+
+Vin < −Vin maka Vo = Vsat−
Keterangan:
+Vin = Amplitudo sinyal input tak membalik (V)
−Vin = Amplitudo sinyal input membalik (V)
Vsat+ = Tegangan saturasi + (V)
Vsat− = Tegangan saturasi - (V)
Vo = Tegangan output (V)
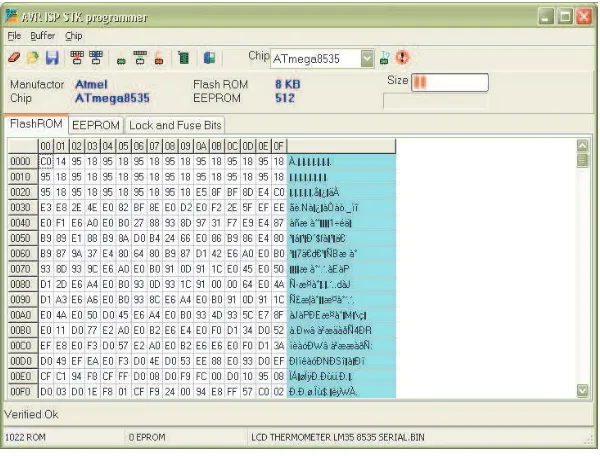
4.1.3 Pengujian Rangkaian Mikrokontroler ATMega8535
Gambar 4.2. Informasi Signature Mikrokontroler
ATMega menggunakan kristal dengan frekuensi 8 MHz, apabila Chip Signature sudah dikenali dengan baik dan dalam waktu singkat, bisa dikatakan rangkaian mikrokontroler bekerja dengan baik dengan mode ISP-nya.
4.1.4 Pengujian rangkaian Ic 74245
IC TTL 74xx245 yang menurut data Sheet adalah ‘ Octal Bus Tranceiver, 3 State’ yang diberi seri ‘74xx245’. Yaitu IC TTL yang dapat digunakan sebagai masukan dan keluaran pada kaki yang sama, tiga kondisi tersebut adalah: Masukan, Keluaran, Pengunci, dan tidak membalikkan keadaan logika pada input ke output.
mikrokontroler yaitu pada kaki ‘ A ‘ dan output menuju kekaki ‘ B ‘ yang terhubung dengan kaki pada 7-Segment. Dengan keadaan ini, maka kaki ‘DIR’ akan terus berlogika Hight (1) sehingga dapat langsung dihubungkan ke VCC. Dan kaki‘ E ‘ dihubungkan ke kaki mikrokontroler yang berfungsi sebagai kontrol keaktifan dotmatriks.
Untuk mengetahui karakteristik dari IC 74ls245 dilakukan pengujian untuk mendapatkan cara kerja dan karakter dari IC74lc245 sehingga kemampuan dan hasil yang diharapkan dapat lebih maksimal. Dalam pengujian IC 74xx245 dilakukan penyusunan seperti pada gambar .
Gambar 4.4. Rangkaian skematik pengujian 74LS245
arus yang diperlukan untuk menyalurkan ke pengendali 7-segment yaitu mikrokontroler adalah hasil jumlah dari arus seluruh titik. Sehingga total arus pada 7-segment menyala semua adalah:
Arus dalam satu titik = 15 mA
Arus dalam satu 7-segment (8 buah aktif/menyala) = 15 x 8 = 120 mA.
Sehingga apabila arus yang mengalirkan ke mikrokontroler sebesar 120 mA, maka mikrokontroler akan mengalami drop tegangan dan tentu saja arus sebesar 120 mA tidak diperbolehkan mengalir langsung ke mikrokontroler yang hanya mampu mengalirkan arus maksimal sebesar 20 mA. maka diperlukan sebuah driver 7-segment yang berfungsi untuk menyalurkan arus yang lebih besar.
4.1.5 Pengujian Rangkaian Display 7-Segment
Pengetesan ini bertujuan untuk mengetahui apakah 7-segment tersebut dapat menampilkan hidup sesuai dengan proses yang diharapkan. Listing program Pengetesan 7-segment:
void_main(void)
{
PORTC=0x10;
PORTD =0x10;
Jika program ini dijalankan, maka pada seven segment akan menghidupkan led pada seven segment sehingga akan memunculkan bilangan angka digit “8” dan dapat dikatakan bahwa seven segment dapat berjalan dengan baik.
4.1.6 Pengujian Rangkaian Keseluruhan
Secara elektronis rangkaian telah bekerja dengan baik, respon dari fotodioda dapat memberikan nilai low apabila tidak mendapat pancaran infra merah dan akan megeluarkan nilai high apabila mendapat pancaran infra merah. output dari mikrokontroler dapat mengirimkan data ke 7-segment. Tampilan pada 7-segment dapat menampilkan bilangan digit 0-9
4.1.7 Analisa Program Keseluruhan
Listing program dari rangkain sistem pencacah nilai counter up adalah sebagai berikut:
/*******************************************************
This program was created by the CodeWizardAVR V3.04 Evaluation Automatic Program Generator
© Copyright 1998‐2013 Pavel Haiduc, HP InfoTech s.r.l. http://www.hpinfotech.com
Date : 07/06/2013 Author :
Company : Comments:
Chip type : ATmega8535 Program type : Application
AVR Core Clock frequency: 1,000000 MHz Memory model : Small
External RAM size : 0 Data Stack size : 128
*******************************************************/
#include <mega8535.h> #include <delay.h>
// Declare your global variables here
unsigned char bil[10]={0x11,0xd7,0x32,0x52,0xd4,0x58,0x18,0xd3,0x10,0x50}; int a,b;
// Declare your local variables here
// Input/Output Ports initialization // Port A initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRA=(0<<DDA7) | (0<<DDA6) | (0<<DDA5) | (0<<DDA4) | (0<<DDA3) | (0<<DDA2) | (0<<DDA1) | (0<<DDA0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTA=(0<<PORTA7) | (0<<PORTA6) | (0<<PORTA5) | (0<<PORTA4) | (0<<PORTA3) | (0<<PORTA2) | (0<<PORTA1) | (0<<PORTA0);
// Port B initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) | (0<<DDB3) | (0<<DDB2) | (0<<DDB1) | (0<<DDB0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) | (0<<PORTB4) | (0<<PORTB3) | (0<<PORTB2) | (0<<PORTB1) | (0<<PORTB0);
// Port C initialization
// Function: Bit7=Out Bit6=Out Bit5=Out Bit4=Out Bit3=Out Bit2=Out Bit1=Out Bit0=Out DDRC=(1<<DDC7) | (1<<DDC6) | (1<<DDC5) | (1<<DDC4) | (1<<DDC3) | (1<<DDC2) | (1<<DDC1) | (1<<DDC0);
PORTC=(1<<PORTC7) | (1<<PORTC6) | (1<<PORTC5) | (1<<PORTC4) | (1<<PORTC3) | (1<<PORTC2) | (1<<PORTC1) | (1<<PORTC0);
// Port D initialization
// Function: Bit7=Out Bit6=Out Bit5=Out Bit4=Out Bit3=Out Bit2=Out Bit1=Out Bit0=Out DDRD=(1<<DDD7) | (1<<DDD6) | (1<<DDD5) | (1<<DDD4) | (1<<DDD3) | (1<<DDD2) | (1<<DDD1) | (1<<DDD0);
// State: Bit7=0 Bit6=0 Bit5=0 Bit4=0 Bit3=0 Bit2=0 Bit1=0 Bit0=0
PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) | (0<<PORTD4) | (0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) | (0<<PORTD0);
// Timer/Counter 0 initialization // Clock source: System Clock // Clock value: Timer 0 Stopped // Mode: Normal top=0xFF // OC0 output: Disconnected
TCCR0=(0<<WGM00) | (0<<COM01) | (0<<COM00) | (0<<WGM01) | (0<<CS02) | (0<<CS01) | (0<<CS00);
TCNT0=0x00; OCR0=0x00;
// Clock value: Timer1 Stopped // Mode: Normal top=0xFFFF // OC1A output: Disconnected // OC1B output: Disconnected // Noise Canceler: Off
// Input Capture on Falling Edge // Timer1 Overflow Interrupt: Off // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off
TCCR1A=(0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) | (0<<WGM11) | (0<<WGM10);
TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (0<<WGM12) | (0<<CS12) | (0<<CS11) | (0<<CS10);
// Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer2 Stopped // Mode: Normal top=0xFF // OC2 output: Disconnected ASSR=0<<AS2;
TCCR2=(0<<WGM20) | (0<<COM21) | (0<<COM20) | (0<<WGM21) | (0<<CS22) | (0<<CS21) | (0<<CS20);
TCNT2=0x00; OCR2=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=(0<<OCIE2) | (0<<TOIE2) | (0<<TICIE1) | (0<<OCIE1A) | (0<<OCIE1B) | (0<<TOIE1) | (0<<OCIE0) | (0<<TOIE0);
// External Interrupt(s) initialization // INT0: Off
// INT1: Off // INT2: Off
MCUCR=(0<<ISC11) | (0<<ISC10) | (0<<ISC01) | (0<<ISC00); MCUCSR=(0<<ISC2);
// USART initialization // USART disabled
UCSRB=(0<<RXCIE) | (0<<TXCIE) | (0<<UDRIE) | (0<<RXEN) | (0<<TXEN) | (0<<UCSZ2) | (0<<RXB8) | (0<<TXB8);
// Analog Comparator initialization // Analog Comparator: Off
// The Analog Comparator's positive input is // connected to the AIN0 pin
// The Analog Comparator's negative input is // connected to the AIN1 pin
ACSR=(1<<ACD) | (0<<ACBG) | (0<<ACO) | (0<<ACI) | (0<<ACIE) | (0<<ACIC) | (0<<ACIS1) | (0<<ACIS0);
SFIOR=(0<<ACME);
// ADC initialization // ADC disabled
ADCSRA=(0<<ADEN) | (0<<ADSC) | (0<<ADATE) | (0<<ADIF) | (0<<ADIE) | (0<<ADPS2) | (0<<ADPS1) | (0<<ADPS0);
SPCR=(0<<SPIE) | (0<<SPE) | (0<<DORD) | (0<<MSTR) | (0<<CPOL) | (0<<CPHA) | (0<<SPR1) | (0<<SPR0);
// TWI initialization // TWI disabled
TWCR=(0<<TWEA) | (0<<TWSTA) | (0<<TWSTO) | (0<<TWEN) | (0<<TWIE); a=0;
b=0;
PORTD=bil[b]; PORTC=bil[a];
while (1) {
if (PINB.0==0)
{while (PINB.0==0); delay_ms(200); a++;
if (a==10) {
b++;
a=0; }
PORTC=bil[a]; }
if (PINB.1==0)
{while (PINB.0==0); delay_ms(200); a‐‐;
if (a==0) { b‐‐;
if(b<=0) b=0; PORTD=bil[b]; a=10;
}
PORTC=bil[a]; }
while (a==9 && b==9) {
PORTC=bil[a]; PORTD=bil[b]; delay_ms(500); PORTC=0xFF; PORTD=0xFF; delay_ms(500); }
} }
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari perancangan dan pengujian yang telah dilakukan dapat disimpulkan :
1. Fotodioda akan mengalami konduksi jika menerima sinyal infra merah dan sebaliknya. Hal ini dapat terlihat jika fotodioda menerima sinyal infra merah maka output penguat sebesar 4,5 v dan jika terhalangi (tidak menerima sinyal) maka output penguat 0 v 2. Peralatan akan mengcounter pada saat fotodioda terhalangi (obyek melintas) yaitu jika
fotodioda terhalangi maka akan terjadi menghitung naik dan jika fotodioda yang dikondisikan sebagai down terhalangi maka akan terjadi menghitung turun
3. Bahasa pemrograman Visual Basic dapat digunakan sebagai perangkat lunak (software) yang berfungsi sebagai pengendali kerja sistem, karena dapat mengendalikan perangkat keras (hardware).
5.2 Saran
Setelah melakukan penulisan ini diperoleh beberapa hal yang dapat dijadikan saran untuk dapat dilakukan perancangan lebih lanjut, yaitu:
1. Agar dilakukan peningkatan kemampuan pada alat ini, sehingga semakin cerdas dengan mengkombinasikan dengan komponen yang lain, sehingga system kerjanya akan lebih baik lagi.
LANDASAN TEORI
2.1 Mikrokontroler ATMega8535
Mikrokontroler adalah suatu alat atau komponen pengontrol atau pengendali yang
berukuran mikro atau kecil. Sebelum ada mikrokontroler, telah ada terlebih dahulu
muncul mikroprosesor. Bila dibandingkan dengan mikroprosesor, mikrokontroler jauh
lebih unggul karena terdapat berbagai alasan, diantaranya :
1. Tersedianya I/O
I/O dalam mikrokontroler sudah tersedia sementara pada mikroprosesor
dibutuhkan IC tambahan untuk menangani I/O tersebut. IC I/O yang dimaksud adalah PPI
8255.
2. Memori Internal
Memori merupakan media untuk menyimpan program dan data sehingga mutlak harus
ada. Mikroprosesor belum memiliki memori internal sehingga memerlukan IC memori
eksternal. Dengan kelebihan-kelebihan di atas, ditambah dengan harganya yang relatif
murah sehingga banyak penggemar elektronika yang kemudian beralih kemikrokontroler.
Namun demikian, meski memiliki berbagai kelemahan, mikroprosesor tetap digunakan
sebagai dasar dalam mempelajari mikrokontroler. Inti kerja dari keduanya adalah sama,
yakni sebagai penguat suatu sistem.
Mikrokontroler adalah otak dari suatu sistem elektronika seperti halnya mikroprosesor
sebagai otak komputer. Namun mikrokontroler memiliki nilai tambah karena didalamnya
sudah terdapat memori dan sistem input/output dalam suatu kemasan IC. Mikrokontroler
memiliki arsitektur CISC (seperti komputer).
Secara umum, AVR dapat dikelompokkan menjadi 4 kelas, yaitu keluarga ATTiny,
keluarga AT90Sxx, keluarga ATMega dan AT89RFxx. Pada dasarnya yang membedakan
masing-masing kelas adalah memori, peripheral, dan fungsinya. Dari segi arsitektur dan
instruksi yang digunakan, mereka bisa dikatakan hampir sama. Oleh karena itu,
dipergunakan salah satu AVR produk Atmel, yaitu ATMega 8535. Selain mudah didapatkan
dan lebih murah ATMega 8535 juga memiliki fasilitas yang lengkap. Untuk tipe AVR
ada 3 jenis yaitu ATTiny, AVR klasik, dan ATMega. Perbedaannya hanya pada fasilitas
dan I/O yang tersedia serta fasilitas lain seperti ADC, EEPROM, dan lain sebagainya.
Salah satu contohnya adalah ATMega 8535. Memiliki teknologi RISC dengan kecepatan
maksimal 16 MHz membuat ATMega 8535 lebih cepat bila dibandingkan dengan varian
MCS51. Dengan fasilitas yang lengkap tersebut menjadikan ATMega 8535 sebagai
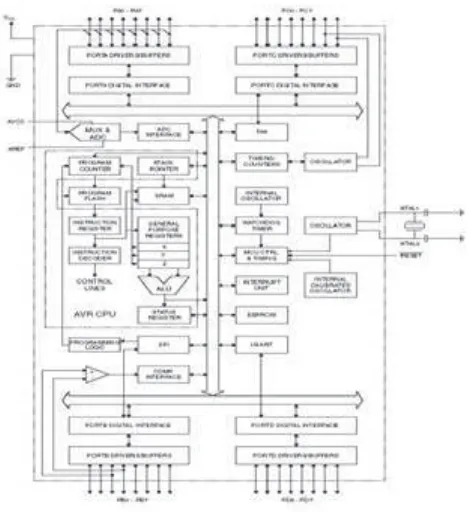
mikrokontroler yang powerfull. Adapun blok diagramnya sebagai berikut :
sebagai berikut :
1. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C, Port D.
2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan.
4. CPU yang terdiri atas 32 buah register.
5. Watchdog Timer dengan osilator internal.
6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kb dengan kemampuan Read While Write.
8. Unit interupsi internal dan eksternal.
9. Port antarmuka SPI.
10.EEPROM sebesar 512 byte yang dapat diprogram saat operasi.
11.Antarmuka komparator analog..
12.Port USART untuk komunikasi serial.
Kapabiltas detail dari ATMega 8535 adalah sebagai berikut :
1. Sistem mikroprosesor 8 bit bebrbasis RISC dengan kecepatan maksimal 16 MHz.
2. Kapabiltas memori flash 8 Kb, SRAM sebesar 512 byte, dan EEPROM
(Electrically Erasable Programmable Read Only Memory) sebesar 512 byte.
3. ADC internal dengan fidelitas 10 bit sebanyak 8 channel.
4. Portal komunikasi serial (USART) dengan kecepatan maksimal 2,5 Mbps.
5. Enam pilihan mode sleep menghemat penggunaan daya listrik.
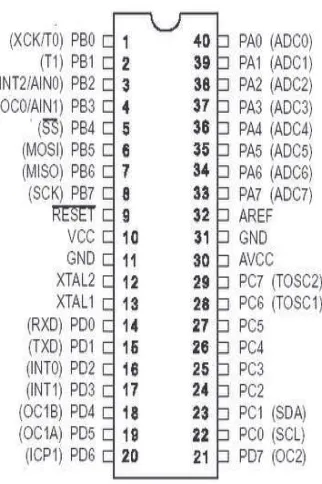
2.2 Konfigurasi PIN ATMega8535
Mikrokontroler ATMega8535 mempunyai jumlah pin sebanyak 40 buah, dimana 32
tegangan, reset, serta tegangan referensi untuk ADC.
Berikut ini adalah susunan pin-pin dari ATMega8535;
VCC merupakan pin yang berfungsi sebagai pin masukkan catu daya
GND merupakan pin ground
Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC
Port B (PB0..PB7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
Timer/Counter, Komparator Analog, dan SPI
Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI,
Komparator Analog, dan Timer Oscilator
Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu
Komparator Analog, Interupsi Iksternal dan komunikasi serial USART
Reset merupakan pin yang digunakan untuk mereset mikrokontroler
XTAL1 dan XTAL2 merupakan pin masukkan clock eksternal (osilator
Fotodioda biasanya digunakan untuk mendeteksi cahaya. Potodioda adalah piranti
semikonduktor yang mengandung sambungan p-n, dan biasanya terdapat lapisan intrinsik
antara lapisan n dan p. Piranti yang memiliki lapisan intrinsik disebut p-i-n atau PIN
potodioda. Cahaya diserap di daerah pengambungan atau daerah intrinsik menimbulkan
pasangan elektron-hole, kebanyakan pasangan tersebut menghasilkan arus yang berasal dari
cahaya.
Mode operasi
Fotodioda dapat dioperasikan dalam 2 mode yang berbeda:
1. Mode potovoltaik: seperti solar sel, penyerapan pada potodioda menghasilkan
tegangan yang dapat diukur. Bagaimanapun, tegangan yang dihasilkan dari tenaga
cahaya ini sedikit tidak linier, dan range perubahannya sangat kecil
2. Mode potokonduktivitas : disini, potodioda diaplikasikan sebagai tegangan revers
(tegangan balik) dari sebuah dioda (yaitu tegangan pada arah tersebut pada dioda
tidak akan menhantarkan tanpa terkena cahaya) dan pengukuran menghasilkan arus
poto. ( hal ini juga bagus untuk mengaplikasikan tegangan mendekati nol).
Ketergantungan arus poto pada kekuatan cahaya dapat sangat linier
3.
Karakteristik bahan potodioda:
1. Silikon (Si) : arus lemah saat gelap, kecepatan tinggi, sensitivitas yang bagus antara
400 nm sampai 1000 nm ( terbaik antara 800 sampai 900 nm).
2. Germanium (Ge): arus tinggi saat gelap, kecepatan lambat, sensitivitas baik antara
600 nm sampai 1800 nm (terbaik 1400 sampai 1500 nm).
3. Indium Gallium Arsenida (InGaAs): mahal, arus kecil saat gelap, kecepatan tinggi
Gambar 2.3. Gambar Photo Dioda
2.4 LED (Light Emiting Dioda)
Light Emitting Dioda (LED), merupakan komponen yang dapat mengeluarkan
emisi cahaya. LED merupakan produk temuan lain setelah dioda. Strukturnya sama
dengan dioda, tetapi belakangan ditemukan bahwa elektron yang menerjang sambungan
p-n juga melepaskan energi panas dan energi cahaya. Karakteristik LED sama dengan
karakteristik dioda penyearah, bedanya jika dioda membuang energi dalam bentuk
panas, sedangkan LED membuang energi dalam bentuk cahaya.
Keuntungan menggunakan LED adalah struktur solid, ukurannya kecil, masa pakai
tahan lama dan tidak terpengaruh oleh on / off pensaklaran, mudah dipakai dan mudah
didapat. Karena tahan lama dan tidak terpengaruh oleh on / off pensaklaran, maka LED
banyak digunakan sebagai display atau indikator baik itu pada audio atau
mesin-mesin kontrol. Sedangkan kerugian penggunaan LED adalah intensitas cahayanya
yang lemah, sehingga tidakdapat dipakai sebagai sumber cahaya besar.
Anoda Katoda
Gambar 2.4. Simbol LED
Radiasi cahaya yang dipancarkan LED tergantung dari materi dan susunan dioda
sinar infra merah, Ga As P (Galium Arsenide Phospide) meradiasikan warna merah
dan kuning, Ga P (Galium Phospide) meradiasikan warna merah dan kuning.
Seperti halnya sebuah dioda, salah satu karakteristik LED adalah harga
ketergantungan antara I terhadap V. Grafik antara V-I untuk LED sama dengan
grafik V-I untuk dioda penyearah. Perbedaannya terletak pada pengertian tegangan
dan arus yang lewat. Harga arus I yang melewati LED menentukan intensitas cahaya yang
dipancarkan, atau dengan kata lain arus LED sebanding dengan intensitas cahaya yang
dihasilkan. Jika arus yang melewati LED besar, maka intensitas cahaya yang dihasilkan
juga terang, sebaliknya jika arus yang lewat kecil maka nyala LED akan redup atau LED
tidak akan menyala sama sekali.
2.5 LED Infra Merah
Beberapa ragam indikator status LED yang tampak (visible) adalah merah, hijau,
kuning. Selain itu juga terdapat LED dengan cahaya tak tampak (invisible) seperti LED
infra merah. Infra merah adalah sinar dengan panjang gelombang ( ) lebih besar dari 800
nm dan tidak dapat dilihat oleh mata.
dan dalam sistem keamanan. LED infra merah digunakan ketika diperlukan daya
penekanan optis yang tinggi. LED ini mempunyai intensitas sinar lebih besar dibanding
LED dengan cahaya tampak. LED infra merah merupakan padanan spectral terbaik
untuk kebanyakan fototransistor sebagai elemen penerima sinar penginderaan
photoelektronik.
Rangkaian sensor infra merah menggunakan foto transistor dan led infra merah yang
dihubungkan secara optik. Foto transistor akan aktif apabila terkena cahaya dari led infra
merah. Antara Led dan foto transistor dipisahkan oleh jarak. Jauh dekatnya jarak
memengaruhi besar intensitas cahaya yang diterima oleh foto transistor. Apabila antara Led
dan foto transistor tidak terhalang oleh benda, maka foto transistor akan aktif. Transistor BC
547 akan tidak aktif karena tidak ada arus yang mengalir ke basis transistor BC 547. Karena
transistor tersebut tidak aktif, maka tidak ada arus yang mengalir dari kolektor ke emitor
sehingga menyebabkan transistor BD 139 tidak aktif dan outputnya berlogik ‘1’ dan Led
padam. Apabila antara Led dan foto transistor terhalang oleh benda, foto transistor akan
tidak aktif, sehingga transistor BC 547 akan aktif karena ada arus mengalir ke basis
transistor BC 547. Dengan transistor dalam keadaan on, maka arus mengalir dari kolektor ke
emitor sehingga menyebabkan transistor BD 139 on dan outputnya berlogik ‘0’ serta Led
menyala.
Infra merah (infra red) ialah sinar elektromagnet yang panjang gelombangnya lebih
daripada cahaya nampak yaitu di antara 700 nm dan 1 mm. Sinar infra merah merupakan
cahaya yang tidak tampak. Jika dilihat dengan dengan spektroskop cahaya maka radiasi
cahaya infra merah akan nampak pada spectrum elektromagnet dengan panjang gelombang
di atas panjang gelombang cahaya merah. Dengan panjang gelombang ini maka cahaya
IC ini adalah chip yang dirancang untuk komunikasi dua arah antara data bus yaitu
untuk mengirimkan data dari bus A ke bus B atau dari bus B ke bus A, yang
dikendalikan oleh masukan Direction (DIR). Sedangkan input enable G berfungsi untuk
menyekat data (disable).
IC 74LS245 ini mempunyai 20 buah pin. Adapun konfigurasi pinnya adalah
sebagai berikut:
Gambar 2.6. Pin diagram IC 74LS245
Rangakain internal dan tabel kebenaran dari IC ini diperlihatkan pada gambar di
bawah ini :
X = logika 0 atau logika 1.
Tabel 2.1. Tabel kebenaran IC 74245
Tranceiver bus berdelapan ini sudah dirancang untuk komunikasi dua arah tak sinkron
antara bus-bus data. Peranti pun memungkinkan transmisi data dari bus A ke bus B atau dari
G DIR OPERASI
0
0
1 0
1
X
Data B ke bus A
Data A ke bus B
Buffer juga membenarkan nilai tegangan input TTL. Untuk lebih lengkapnya pada gambar
2.8 ditunjukkan diagram rangkaian dari IC 74 LS245.
(A1) 2
Gambar 2.7. Rangkaian internal IC 74245
2.7 Seven Segmen
Seven segmen merupakan komponen elektronika yang banyak digunakan untuk
menampilkan angka. Seven segmen ini sebenarnya merupakan LED yang disusun sedemikian
rupa sehingga membentuk suatu pola tertentu, dimana jika LED –LED tersebut dinyalakan
dengan kombinasi tertentu, maka akan terbentuk suatu angka tertentu. Seven segmen
mempunyai 7 buah segmen ditambah 1 segmen yang berfungsi sebagai desimal point. Gambar
susunan dari seven segmen ditunjukkan pada gambar berikut ini :
seterusnya sesuai gambar di atas. Dp merupakan singkatan dari desimal point. Seven segmen ada
2 tipe, yaitu common anoda dan common katoda. Pada seven segmen tipe common anoda,
anoda dari setiap LED dihubungkan menjadi satu kemudian dihubungkan ke sumber tegangan
positip dan katoda dari masing-masing LED berfungsi sebagai input dari seven segmen, seperti
ditunjukkan pada gambar berikut ini :
Gambar 2.9. Konfigurasi Seven Segmen Tipe Common Anoda
Sesuia dengan gambar di atas, maka untuk menyalakan salah satu segmen, maka
katodanya harus diberi tegangan 0 volt atau logika low. Misalnya jika segmen a akan
dinyalakan, maka katoda pada segmen a harus diberi tegangan 0 volt atau logika low, dengan
demikian maka segmen a akan menyala. Demikian juga untuk segmen lainnya.
Pada seven segmen tipe common kaoda, kaoda dari setiap LED dihubungkan menjadi
satu kemudian dihubungkan ke ground dan anoda dari masing-masing LED berfungsi sebagai
Sesuia dengan gambar di atas, maka untuk menyalakan salah satu segmen, maka
anodanya harus diberi tegangan minimal 3 volt atau logika high. Misalnya jika segmen a
akan dinyalakan, maka anoda pada segmen a harus diberi tegangan minimal 3 volt atau
logika high, dengan demikian maka segmen a akan menyala. Demikian juga untuk segmen
lainnya.
2.8 Op-Amp (Penguat Operasional)
Penguat operasional (Op-Amp) adalah suatu blok penguat yang mempunyai dua
masukan dan satu keluaran. Penguat operasional (Op-Amp) dikemas dalam suatu
rangkaian terpadu (integrated circuit-IC). Salah satu tipe operasional amplifier (Op-Amp)
yang populer adalah LM324. IC LM324 merupakan operasional amplifier yang dikemas
dalam bentuk dual in-line package (DIP). Kemasan IC jenis DIP memiliki tanda bulatan
atau strip pada salah satu sudutnya untuk menandai arah pin atau kaki nomor 1 dari IC
tersebut. Penomoran IC dalam kemasan DIP adalah berlawanan arah jarum jam dimulai
dari pin yang terletak paling dekat dengan tanda bulat atau strip pada kemasan DIP
tersebut. IC LM324 memiliki kemasan DIP 14 pin seperti terlihat pada gambar berikut:
LM324 adalah quad op amp sirkuit terpadu, yang menggunakan 14-pin dual-garis
plastik paket, bentuk seperti yang ditunjukkan. Ini berisi empat set op amp internal bentuk
yang sama persis, di samping pembagian kekuasaan, penguat independen empat. Penguat
operasional untuk setiap kelompok simbol yang digunakan untuk menunjukkan bahwa ia
memiliki 5 mengarah ke kaki, yang "+", "-" dua sinyal input, "V +", "V-" positif, negatif
sisi power supply, "Vo" untuk output. Dua sinyal input dalam, Vi-(-) untuk input pembalik,
kata operasional amplifier keluaran Vo dari sinyal dengan bit bertentangan input; Vi + (+)
untuk input fase yang sama, kata operasional amplifier keluaran Vo dari fase sinyal dengan
input yang sama.
2.8.1 Op-Amp Ideal
Op-amp pada dasarnya adalah sebuah differensial amplifier (penguat diferensial)
yang memiliki dua masukan. Input (masukan) op-amp ada yang dinamakan input
inverting dan non inverting. Op-amp ideal memiliki open loop gain (penguatan loop
terbuka) yang tak terhingga besarnya. Seperti misalnya op-amp LM324 yang sering
digunakan oleh banyak praktisi elektronika, memiliki karakteristik tipikal open loop gain
besar. Penguatan yang sebesar ini membuat op-amp menjadi tidak stabil dan
penguatannya menjadi tidak terukur (infinite).
Disinilah peran rangkaian negative feedback (umpan balik negatif) diperlukan
sehingga op-amp dapat dirangkai menjadi aplikasi dengan nilai penguatan yang terukur
(finite).
Ada dua aturan penting dalam melakukan analisa rangkaian op-amp berdasarkan
karakteristik op-amp ideal. Aturan ini dalam beberapa literatur dinamakan golden rule
yaitu:
Inilah dua aturan penting amp ideal yang digunakan untuk menganalisa rangkaian
op-amp.
2.8.2 Karakteristik Ideal Op-Amp
Untuk rangkaian instrumentasi yang membutuhkan penguatan yang stabil dan
mendekati nilai pada teori harus dilakukan kompensasi sehingga didapatkan performance
yang mendekati keadaan ideal. Penguat operasional banyak digunakan dalam berbagai
aplikasi karena beberapa keunggulan yang dimilikinya, seperti penguatan yang tinggi,
impedansi masukan yang tinggi, impedansi keluaran yang rendah dan lain sebagainya.
Berikut ini adalah karakteristik dari Op Amp ideal:
1. Penguatan tegangan lingkar terbuka (open-loop voltage gain) AVOL = -∞
Penguatan tegangan lingkar terbuka (open loop voltage gain) adalah penguatan
diferensial Op Amp pada kondisi dimana tidak terdapat umpan balik (feedback).
Secara ideal, penguatan tegangan lingkar terbuka adalah:
AVOL = Vo / Vid = -∞
AVOL = Vo/(V1-V2) = -∞
Tanda negatif menandakan bahwa tegangan keluaran VO berbeda fasa dengan
tegangan masukan Vid. Konsep tentang penguatan tegangan tak berhingga tersebut
sukar untuk divisualisasikan dan tidak mungkin untuk diwujudkan. Suatu hal yang
perlu untuk dimengerti adalah bahwa tegangan keluaran VO jauh lebih besar
daripada tegangan masukan Vid. Dalam kondisi praktis, harga AVOL adalah antara
5000 (sekitar 74 dB) hingga 100000 (sekitar 100 dB). Tetapi dalam penerapannya
Karena itu Op Amp baik digunakan untuk menguatkan sinyal yang amplitudonya
sangat kecil.
2. Tegangan ofset keluaran (output offset voltage) VOO = 0
Tegangan ofset keluaran (output offset voltage) VOO adalah harga tegangan
keluaran dari Op Amp terhadap tanah (ground) pada kondisi tegangan masukan Vid
= 0. Secara ideal, harga VOO = 0 V. Op Amp yang dapat memenuhi harga tersebut
disebut sebagai Op Amp dengan CMR (common mode rejection) ideal. Tetapi
dalam kondisi praktis, akibat adanya ketidakseimbangan dan ketidakidentikan
dalam penguat diferensial dalam Op Amp tersebut, maka tegangan ofset VOO
biasanya berharga sedikit di atas 0 V. Apalagi apabila tidak digunakan umpan balik
maka harga VOO akan menjadi cukup besar untuk menimbulkan saturasi pada
keluaran. Untuk mengatasi hal ini, maka perlu diterapakan tegangan koreksi pada
Op Amp. Hal ini dilakukan agar pada saat tegangan masukan Vid = 0, tegangan
keluaran VO juga = 0.
3. Hambatan masukan (input resistance) RI = ∞
Hambatan masukan (input resistance) Ri dari Op Amp adalah besar hambatan di
antara kedua masukan Op Amp. Secara ideal hambatan masukan Op Amp adalah
tak berhingga. Tetapi dalam kondisi praktis, harga hambatan masukan Op Amp
adalah antara 5 kW hingga 20 MW, tergantung pada tipe Op Amp. Harga ini
biasanya diukur pada kondisi Op Amp tanpa umpan balik. Apabila suatu umpan
balik negatif (negative feedback) diterapkan pada Op Amp, maka hambatan
masukan Op Amp akan meningkat. Dalam suatu penguat, hambatan masukan yang
besar adalah suatu hal yang diharapkan. Semakin besar hambatan masukan suatu
amplitudonya sangat kecil. Dengan hambatan masukan yang besar, maka sumber
sinyal masukan tidak terbebani terlalu besar.
4. Hambatan keluaran (output resistance) RO = 0
Hambatan Keluaran (output resistance) RO dari Op Amp adalah besarnya hambatan
dalam yang timbul pada saat Op Amp bekerja sebagai pembangkit sinyal. Secara
ideal harga hambatan keluaran RO Op Amp adalah = 0. Apabula hal ini tercapai,
maka seluruh tegangan keluaran Op Amp akan timbul pada beban keluaran (RL),
sehingga dalam suatu penguat, hambatan keluaran yang kecil sangat diharapkan.
Dalam kondisi praktis harga hambatan keluaran Op Amp adalah antara beberapa
ohm hingga ratusan ohm pada kondisi tanpa umpan balik. Dengan diterapkannya
umpan balik, maka harga hambatan keluaran akan menurun hingga mendekati
kondisi ideal.
5. Lebar pita (band width) BW = ∞
Lebar pita (band width) BW dari Op Amp adalah lebar frekuensi tertentu dimana
tegangan keluaran tidak jatuh lebih dari 0,707 dari harga tegangan maksimum pada
saat amplitudo tegangan masukan konstan. Secara ideal, Op Amp memiliki lebar
pita yang tak terhingga. Tetapi dalam penerapannya, hal ini jauh dari kenyataan.
Sebagian besar Op Amp serba guan memiliki lebar pita hingga 1 MHz dan biasanya
diterapkan pada sinyal dengan frekuensi beberapa kiloHertz. Tetapi ada juga Op
Amp yang khusus dirancang untuk bekerja pada frekuensi beberapa MegaHertz. Op
Amp jenis ini juga harus didukung komponen eksternal yang dapat
6. Waktu tanggapan (respon time) = 0 detik
Waktu tanggapan (respon time) dari Op Amp adalah waktu yang diperlukan oleh
keluaran untuk berubah setelah masukan berubah. Secara ideal harga waktu respon
Op Amp adalah = 0 detik, yaitu keluaran harus berubah langsung pada saat
masukan berubah. Tetapi dalam praktiknya, waktu tanggapan dari Op Amp
memang cepat tetapi tidak langsung berubah sesuai masukan. Waktu tanggapan Op
Amp umumnya adalah beberapa mikro detik hal ini disebut juga slew rate.
Perubahan keluaran yang hanya beberapa mikrodetik setelah perubahan masukan
tersebut umumnya disertai dengan oveshoot yaitu lonjakan yang melebihi kondisi
steady state. Tetapi pada penerapan biasa, hal ini dapat diabaikan.
7. Karakteristik tidak berubah dengan suhu
Sebagai mana diketahui, suatu bahan semikonduktor yang akan berubah
karakteristiknya apabila terjadi perubahan suhu yang cukup besar. Pada Op Amp
yang ideal, karakteristiknya tidak berubah terhadap perubahan suhu. Tetapi dalam
prakteknya, karakteristik sebuah Op Amp pada umumnya sedikit berubah,
walaupun pada penerapan biasa, perubahan tersebut dapat diabaikan.
2.8.3 Non-Inverting Amplifier
Prinsip utama rangkaian penguat non-inverting adalah seperti yang diperlihatkan pada
gambar di bawah berikut ini. Seperti namanya, penguat ini memiliki masukan yang dibuat
melalui input non-inverting. Dengan demikian tegangan keluaran rangkaian ini akan satu
fasa dengan tegangan inputnya. Untuk menganalisa rangkaian penguat op-amp non
Gambar 2.12. Penguat Non-1nverter
Dengan menggunakan aturan 1 dan aturan 2, kita uraikan dulu beberapa fakta yang ada,
antara lain :
vin = v+
v+ = v- = vin ... lihat aturan 1.
Dari sini ketahui tegangan jepit pada R2 adalah vout – v- = vout – vin, atau iout = (vout-vin)/R2.
Lalu tegangan jepit pada R1 adalah v- = vin, yang berarti arus iR1 = vin/R1.
Hukum kirchkof pada titik input inverting merupakan fakta yang mengatakan bahwa :
iout + i(-) = iR1
Aturan 2 mengatakan bahwa i(-) = 0 dan jika disubsitusi ke rumus yang sebelumnya, maka
diperoleh
iout = iR1 dan Jika ditulis dengan tegangan jepit masing-masing maka diperoleh
(vout – vin)/R2 = vin/R1 yang kemudian dapat disederhanakan menjadi :
vout = vin (1 + R2/R1)
Jika penguatan G adalah perbandingan tegangan keluaran terhadap tegangan masukan,
maka didapat penguatan op-amp non-inverting :
Impendasi untuk rangkaian Op-amp non inverting adalah impedansi dari input
non-inverting op-amp tersebut. Dari datasheet, LM324 diketahui memiliki impedansi input Zin
PENDAHULUAN
1.1 Latar Belakang Masalah
Perkembangan teknologi semakin hari semakin cepat, begitu juga dengan kebutuhan
manusia terhadap suatu peralatan yang canggih semakin meningkat. Peralatan yang canggih
dan dapat mempermudah pekerjaan manusia sangat dibutuhkan. Diantara beberapa
peralatan yang sangat dibutuhkan manusia belakangan ini salah satunya adalah suatu
peralatan yang dapat membuat suatu ruangan yang peralatan listriknya aktif secara otomatis.
Peralatan ini juga dapat menghitung jumlah benda dalam suatu ruangan secara otomatis.
Selain fungsi yang tersebut diatas, peralatan lain yang juga dibutuhkan adalah peralatan
pengaman. Pada peralatan ini juga dipasang sebuah inframerah yang berfungsi sebagai
sensor yang akan aktif ketika ada mobil yang memasuki ruangan. Berdasarkan penjelasan di
atas, penulis ingin merancang sebuah peralatan yang dapat membuat peralatan listrik
bekerja secara otomatis dalam suatu ruangan dan pengaman ruangan tersebut.
Penelitian ini bertujuan untuk membuat alat deteksi benda yang bergerak
penerimaan ATmega8535 berbasis mikrokontroler sensor phototransistor. Mikrokontroler
Atmega8535 berfungsi sebagai tempat untuk mengolah menerima tegangan dari sensor
fototransistor yang akan diubah menjadi bentuk data informasi yang akan ditampilkan pada
seven segmen. Alat dapat dirancang dengan memaanfaatkan dua sensor fototransistor dan
infra-merah sebagai dua sumber cahaya atau sinyal.
Adapun yang menjadi batasan masalah dalam laporan Tugas Akhir ini adalah
sebagai berikut:
Membahas prinsip kerja dari led inframerah ke fotodioda
Alat uji ini hanya difungsikan sebagai alat monitoring yang mampu menangkap
suatu obyek yang bergerak dalam suatu ruangan dan hasilnya ditampilkan di seven
segmen
1.3 Tujuan Penulisan
Adapun tujuan yang ingin dicapai dalam pembuatan alat tugas akhir ini adalah:
Merancang suatu sistem alat hitung obyek dalam suatu area perpakiran
memanfaatkan sensor inframerah yang ditampilkan diseven segmen sebagai display
Melakukan pengujian dan analisis terhadap rangkaian yang dirancang
1.4 Manfaat Penulisan
Manfaat penelitian rancangan alat ini adalah untuk memonitoring suatu tempat yang
membutuhkan tempat perpakiran seperti perkantoran, perhotelan, supermarket, dan
lain-lain.
1.5 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman maka penulis membuat
sistematika pembahasan bagaimana sebenarnya prinsip kerja dari alat hitung jumlah yang
Dalam bab ini berisikan mengenai latar belakang, tujuan penulisan, batasan masalah,
manfaat penelitian, serta sistematika penulisan.
BAB II LANDASAN TEORI
Dalam bab ini berisi tentang teori dasar yang perlu dketahui untuk mempermudah
dalam pemahaman prinsip kerja dari rangkaian pada sistem.
BAB III PERANCANGAN DAN SISTEM KERJA RAGKAIAN
Pada bab ini akan akan dibahas perancangan dan sistem kerja rangkaian, diagram
blok .
BAB IV PENGUJIAN ALAT DAN PROGRAM
Pada bab ini berisi tentang pengujian sistem dan analisa rangkaian dari system alat
proyek ini.
BAB V KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang berisi tentang kesimpulan dari pembahasan yang
Peralatan ini merancang suatu alat hitung obyek dalam suatu area perpakiran
memanfaatkan sensor inframerah yang ditampilkan diseven segmen sebagai display. Sistem
yang penulis rancang akan menghitung cacahan nilai objek yang lewat. Sistem teridiri dari
led infra merah dan fotodioda untuk mendeteksi obyek yang lewat. Saat tidak ada objek
yang lewat, maka sinar infra merah akan mengenai fotodioda, Sensor fotodioda akan
bernilai high (>2,5 v), sedang konparator akan memastikan tegangan yang keluar setelah
masuk dari fotodioda bernilai 5 v, setelah dari komparator, maka sinyal high akan masuk ke
mikrokontroller dan kemudian akan diolah memberikan logika high pada mikrokontroller,
sedangkan jika ada obyek yang lewat, maka sinar inframerah akan terhalangi dan fotodioda
tidak terkena pancaran sinar inframerah, maka arus balik ( Iλ ) fotodioda akan menjadi
sangat kecil sehingga tidak akan mengeluarkan tegangan atau dalam kondisi low (0 volt),
kondisi low tersebut akan diteruskan oleh komparator yang memastikan sinyal yang dikirim
ke mikrokontroller benar-benar low (0 volt), setelah masuk ke mikro, maka sinyal tersebut
akan diolah untuk menaikkan nilai pada seven segment sebesar 1 digit, begeti seterusnya.
Berdasarkan penjelasan di atas, penulis ingin merancang sebuah peralatan yang dapat
membuat peralatan listrik bekerja secara otomatis dalam suatu area. Untuk itu penulis
menyusun sebuah Karya Akhir yang berjudul “RANCANG BANGUN ALAT HITUNG
JUMLAH KENDARAAN MEMANFAATKAN SENSOR INFRAMERAH SEBAGAI
INPUT PADA GERBANG PARKIR BERBASIS MIKROKONTROLER
MEMANFAATKAN SENSOR INFRAMERAH SEBAGAI INPUT PADA
GERBANG PARKIR BERBASIS MIKROKONTROLER ATMEGA8535
TUGAS AKHIR
MARLENI
102408002
PROGRAM STUDI D3 FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN PENGETAHUAN ALAM
UNIVERSITAS SUMATERA UTARA
Judul : RANCANG BANGUN ALAT HITUNG JUMLAH KENDARAAN
MEMANFAATKAN SENSOR INFRAMERAH SEBAGAI INPUT
PADA GERBANG PARKIR BERBASIS MIKROKONTROLER
ATMEGA8535
Kategori : TUGAS AKHIR
Nama : MARLENI
No.Induk Mahasiswa : 102408002
Program Studi : D3 FISIKA
Departemen : FISIKA
Fakultas : MATEMATIKA DAN ILMU PENGETAHUAN ALAM (FMIPA)
UNIVERSITAS SUMATERA UTARA.
Diluluskan di
Medan, 29 Juli 2012
Diketahui/ Disetujui oleh
Ketua Program Studi D3 Fisika Pembimbing
(Dr.Susilawati M.Si) (Junedi Ginting S.Si, M.Si)
RANCANG BANGUN ALAT HITUNG JUMLAH KENDARAAN
MEMANFAATKAN SENSOR INFRAMERAH SEBAGAI INPUT PADA GERBANG
PARKIR BERBASIS MIKROKONTROLER ATMEGA8535
TUGAS AKHIR
Saya mengakui bahwa Laporan Tugas Akhir ini adalah hasil kerja saya sendiri, kecuali
beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Juli 2013
Syukur Alhamdulillah berkat rahmat dan karunia-NYA penulis dapat
menyelesaikan Tugas Akhir ini. Salawat dan salam kepada Rasulullah Muhammad SAW.
Laporan Tugas Akhir ini merupakan salah satu syarat yang harus dipenuhi untuk
menyelesaikan pendidikan DIII pada program studi DIII Fisika Fakultas Matematika dan
Ilmu Pengetahuan Aalam (FMIPA). Atas bantuanya dan motivasi yang di berikan, maka
penulis mengucapkan banyak terima kasih kepada : Bapak Junedi Ginting S.Si, M.Si selaku
pembimbing, Bapak Dr. Sutarman, M.Sc selaku Dekan FMIPA USU, Dr. Susilawati, M.Si
selaku ketua jurusan program studi DIII Fisika dan Seluruh Dosen yang telah memberikan
ilmu pengetahuan selama perkuliahan, yang membuka cakrawala berfikir serta pegawai tata
usaha yang ikut mensukseskan proses belajar mengajar. Rekan-rekan di Fisika
Instrumentasi terima kasih atas motivasi, kritik dan sarannya terhadap laporan Tugas
Akhir ini. Akhirnya terima kasih kepada Ayahanda dan Ibunda yang telah memberikan
didikan terbaik bagi penulis. Penulis menyadari bahwa dalam penyusunan laporan Tugas
Akhir ini masih terdapat kekurangan dan masih jauh kesempurnaan. Oleh karna itu penulis
sangat terbuka terhadap saran maupun kritikan dalam sebuah diskusi yang membangun dari
pembaca
Semoga laporan Tugas Akhir ini bermanfaat bagi setiap orang yang membacanya
Peralatan ini merancang suatu alat hitung obyek dalam suatu area perpakiran
memanfaatkan sensor inframerah yang ditampilkan diseven segmen sebagai display. Sistem
yang penulis rancang akan menghitung cacahan nilai objek yang lewat. Sistem teridiri dari
led infra merah dan fotodioda untuk mendeteksi obyek yang lewat. Saat tidak ada objek
yang lewat, maka sinar infra merah akan mengenai fotodioda, Sensor fotodioda akan
bernilai high (>2,5 v), sedang konparator akan memastikan tegangan yang keluar setelah
masuk dari fotodioda bernilai 5 v, setelah dari komparator, maka sinyal high akan masuk ke
mikrokontroller dan kemudian akan diolah memberikan logika high pada mikrokontroller,
sedangkan jika ada obyek yang lewat, maka sinar inframerah akan terhalangi dan fotodioda
tidak terkena pancaran sinar inframerah, maka arus balik ( Iλ ) fotodioda akan menjadi
sangat kecil sehingga tidak akan mengeluarkan tegangan atau dalam kondisi low (0 volt),
kondisi low tersebut akan diteruskan oleh komparator yang memastikan sinyal yang dikirim
ke mikrokontroller benar-benar low (0 volt), setelah masuk ke mikro, maka sinyal tersebut
akan diolah untuk menaikkan nilai pada seven segment sebesar 1 digit, begeti seterusnya.
Berdasarkan penjelasan di atas, penulis ingin merancang sebuah peralatan yang dapat
membuat peralatan listrik bekerja secara otomatis dalam suatu area. Untuk itu penulis
menyusun sebuah Karya Akhir yang berjudul “RANCANG BANGUN ALAT HITUNG
JUMLAH KENDARAAN MEMANFAATKAN SENSOR INFRAMERAH SEBAGAI
INPUT PADA GERBANG PARKIR BERBASIS MIKROKONTROLER
PERSETUJUAN i
3.2. Rangkaian Power Supplay (PSA) 24
3.3. Rangkaian Mikrokontroler ATMega853 25
3.4. Rangkaian Sensor dan Penguat 26
4.1. Pengujian Rangkaian 31
4.1.1. Pengujian Rangkaian Power Supplay 31
4.1.2. Pengujian Rangkaian Sensor dan Penguat 31
4.1.3. Pengujian Rangkaian Mikrokontroler ATMega8535 35
4.1.4. Pegujian Rangkaian IC 74245 36
4.1.5. Pegujian Rangkaian Display 7-Segment 39
Tabel 2.1 Kebenaran IC74245 12
Tabel 4.1 Tegangan Fotodioda 33
Gambar 2.1 Blok Diagram ATMega8535 5
Gambar 2.2 Konfigurasi PIN ATMega 7
Gambar 2.3 Fotodioda 9
Gambar 2.4 Simbol Led 9
Gambar 2.5 Spektrum Sinar Led 10
Gambar 2.6 Pin Diagram IC 74LS245 12
Gambar 2.7 Rangkaian Interval IC 74245 13
Gambar 2.8 Susunan Seven Segment 13
Gambar 2.9 Konfigurasi Seven Segment Tipe Common Anoda 14
Gambar 2.10 Konfigurasi Seven Segment Tipe Common Katoda 14
Gambar 2.11 Konfigurasi Pin IC Op-Amp LM3245 15
Gambar 2.12 Penguat Non-Inverter 21
Gambar 3.1 Diagram Blok Sistem 23
Gambar 3.2 Rangkaian Power Supplay (PAS) 24
Gambar 3.3 Rangkaian Skematik Minimum Mikrokontroler
ATMega8535 25
Gambar 3.4 Rangkaian Sensor dan Penguat 27
Gambar 3.5 Rangkaian Penampil Seven Segment 27
Gambar 3.6 Flowchart Program 29
Gambar 4.1 Komparator Sederhana 34
Gambar 4.2 Informasi Signature Mikrokontroler 36
Gambar 4.3 Bentuk DIP IC 74xx245 37