RANCANGAN
QUADCOPTER
UNTUK SISTEM PEMANTAU
UDARA BERBASIS MIKROKONTROLLER ATMEGA 328
SKRIPSI
LAMHOT SIHALOHO
100801037
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN 2014
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat untuk
memperoleh gelar Sarjana Sains
LAMHOT SIHALOHO
100801037
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
i
Judul : Rancangan Quadcopter Untuk Sistem Pemantau Udara Berbasis Mikrokontroller ATmega 328
Kategori : Skripsi
Nama : Lamhot Sihaloho
Nomor Induk Mahasiswa : 100801037
Program Studi : Sarjana (S1) Fisika
Departemen : Fisika
Fakultas : Matematika Dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
Disetujui di Medan, September 2014
Disetujui Oleh
Pembimbing II Pembimbing I
Dr. Bisman P. M. Eng, Sc Dr. Nasruddin MN, M. Eng, Sc NIP. 195609181985011002 NIP. 195507061981021002
Departemen Fisika FMIPA USU Ketua,
Dr. Marhaposan Situmorang NIP. 195510301980031003
RANCANGAN
QUADCOPTER
UNTUK SISTEM PEMANTAU
UDARA BERBASIS MIKROKONTROLLER ATMEGA 328
SKRIPSI
Saya menyatakan bahwa skripsi ini adalah hasil kerja saya sendiri, yang di dalammya terdapat beberapa kutipan dan ringkasan sebagai referensi yang masing- masing disebutkan sumbernya.
Medan, September 2014
iii
Puji dan syukur penulis panjatkan kehadirat Tuhan yang Maha Esa yang telah memberikan Rahmat, Karunia dan Bimbingan-Nya sehingga penulis dapat menyelesaikan tugas akhir ini yang berjudul Rancangan Quadcopter Untuk Sistem Pemantau Udara Berbasis Mikrokontroller ATmega 328. Laporan tugas akhir ini diajukan untuk memenuhi salah satu syarat mencapai gelar sarjana fisika. Penelitian skripsi ini dilakukan di Laboratorium Fisika Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara, sesuai dengan waktu yang ditetapkan.
Penulis juga menyampaikan banyak terima kasih kepada :
1. Bapak Dr. Nasruddin MN, M. Eng, Sc selaku dosen pembimbing I di USU yang telah memebrikan bimbingan, waktu dan tenaga dalam
penyelesaian tugas akhir ini.
2. Bapak Dr. Bisman P. M. Eng, Sc selaku dosen pembimbing II di USU yang telah memberikan bimbingan, waktu dan tenaga dalam penyelesaian tugas akhir ini.
3. Bapak Dr. Sutarman, M. Sc sebagai dekan Fakultas Matematika dan Ilmu Pengetahuan Alam (MIPA) USU. Bapak Dr. Marhaposan Situmorang selaku Ketua Departemen Fisika FMIPA USU, Bapak Drs. Syahrul Humaidi, M. Sc selaku sekretaris Departemen Fisika FMIPA USU beserta seluruh staf pengajar dan pegawai Departemen Fisika FMIPA USU.
4. Bapak saya J. Sihaloho dan Ibu T. Siagian, kak Mariati Sihaloho, kak Paskaria Sihaloho, kak Jojor Maria Sihaloho, dan adik Fransisca Anjeli Sihaloho, beserta keluarga besar yang memberikan dukungan, doa dan semangat dalam penyelesaian tugas akhir ini.
5. Fitry Totryanti Silaban yang selalu mendukung, memotivasi, mendoakan dan selalu memberi semangat kepada saya selama penyelesaian tugas akhir ini.
ini.
7. Seluruh adik-adik saya di Jurusan Fisika mulai dari angkatan 2011 sampai 2013 yang selalu memberikan semangat kepada saya dalam penyelesaian skripsi ini.
v
RANCANGAN
QUADCOPTER
UNTUK SISTEM PEMANTAU
UDARA BERBASIS MIKROKONTROLLER ATMEGA 328
ABSTRAK
Telah dirancang sebuah sistem pemantau udara (quadcopter) untuk pemantau yang dapat mengendalikan objek terbang di udara. Sistem quadcopter tersebut memiliki ukuran 30 cm x 30 cm terdiri dari empat buah baling baling (panjang 20.32 cm). Dalam menjaga keseimbangan quadcopter selama bermanufare di udara, digunakan sensor accelerometer MMA7260Q. Remote control memberikan perintah dan ditangkap receiver pada quadcopter, perintah atau data yang diterima oleh receiver diproses oleh mikrokontroller ATmega 328. ATmega 328 membaca data yang diberikan dan memberikan sinyal pada setiap komponen untuk melaksanakan perintah. Quadcopter menggunakan cctv wireless yang dapat merekam objek dan dilengkapi dengan sistem pengiriman dengan pemancar Rf433. Kemudian data yang dikirim ditangkap oleh receiver pada PC. Untuk menghubungkan antara penerima (receiver) dengan Personal Computer (PC) dibutuhkan converter, hal ini dibutuhkan karena pada Personal Computer (PC) tidak mempunyai konektor AV (audio video), oleh sebab itu dibutuhkan easy
capture . Dari hasil pengujian motor, quadcopter mendapatkan respon untuk
terangkat dimulai dari pulsa 77 dengan rata-rata nilai Revolution Per
Minute (RPM) 122.75 dan rata-rata Pulse Width Modulation (PWM) 13.47 Hz.
Dari hasil pengujian kemiringan dapat diketahui bahwa kemiringan tergantung posisi quadcopter.
Kata Kunci : Quadcopter, Sensor accelerometer MMA7260Q, Mikrokontroller ATmega 328, PC, baling-baling.
ABSTRACT
An air monitoring system (quadcopter) that have purposed to monitoring which can control flying object through the air, have been designed. The quadcopter system has a size of 30 cm x 30 cm which consists of four propellers (have length 20.32 cm). To maintaining of quadcopter during manufaring in the air, used MMA7260Q accelerometer sensor. The remote control gives a command and the receiver,it processed by the Atmega 328 microcontroller. The Atmega 328 microcontroller will read input data and signals on every component to execute the command. Quadcopter using wireless cctv to recorded the object and was equipped by a delivery system with RF433 transmitter. Then, data which have been sent, is capture by receiver on PC. To connected the receiver with PC needed a converter , it is needed because PC does not have AV connector (audio video), so that, it would takes the easy capture. From the resulted and analyzed testing of the motor, show that quadcopter response to elevated at pulse which started from 77 with have an average value of Revolution Per Minute (RPM) is 122.7 and average value of Pulse Width Modulation (PWM) is 13.47 Hz. From the resulted of slope testing, it was knew that the slope was depended by quadcopter position.
vii 2.4.2 Konstanta Variabel 11 2.4.3 Codevision AVR 12 2.5 Baling-Baling 13 2.6 Sensor Accelerometer 14 2.6.1 Fitur-Fitur Pada Accelerometer 15 2.6.2 Parameter Accelerometer 15 2.7 Motor BLDC (Brushless Direct Current) 16
2.8 Elektronika Speed Control 17
2.9 Remote Control 18
2.10 Wireless CCTV 19
2.11 Pengukuran Sudut Kemiringan 19
2.12 Mikrikontroller ATmega 328 20
2.12.1 Fitur Mikrokontroller ATmega 328 20
3.1 Diagram Blok 24
3.2 Rangkaian Accelerometer MMA7260Q 24
3.3 Rangkaian Mikrokontroller ATmega 328 27 3.4 Rangkaian ESC (Easy Speedy Control) 28
Bab 4. Hasil dan Pembahasan 4.1 Pengujian Motor 34 4.2 Pengujian Sensor Accelerometer MMA7260Q 38 4.2.1 Hasil Pengujian Quadcopter Pada Posisi Stabil 38 4.2.2 Hasil Pengujian Quadcopter Pada Posisi Miring ke Kanan 39 4.2.3 Hasil Pengujian Quadcopter Pada Posisi Miring ke Kiri 39 4.2.4 Hasil Pengujian Quadcopter Pada Posisi Condong ke Depan 40 4.2.5 Hasil Pengujian Quadcopter Pada Posisi Condong ke Belakang 40 4.2.6 Hasil Pengujian Quadcopter Pada Posisi Serong Kanan Depan 41 4.2.7 Hasil Pengujian Quadcopter Pada Posisi Serong Kiri Depan 41
4.2.8 Hasil Pengujian Quadcopter Pada Posisi Serong Kanan Belakang 42
4.2.9 Hasil Pengujian Quadcopter Pada Posisi Serong Kiri Belakang 42
4.3 Pengujian Sistem Pemantau 44 4.4 Pengujian Mikrokontroller ATmega 328 45 Bab 5. Kesimpulan dan Saran 5.1 Kesimpulan 46
5.2 Saran 47
ix
DAFTAR TABEL
Nomor Judul Halaman
Tabel
Tabel 2.1 Panjang Gelombang dan Frekuensi Gelombang Radio 10
Tabel 2.2 Tipe Data 11
Tabel 2.3 Jenis dan Fitur Sensor Accelerometer 15 Tabel 3.1 Diskripsi Tingkat Sensitivitas Accelerometer MMA7260Q 26 Tabel 4.1 Hasil Pengukuran Pulsa Dari RC Dengan RPM
Motor Brushless 35
Tabel 4.2 Hasil Pengukuran tegangan Mikrokontroller Terhadap
Motor Brushless 36
Tabel 4.3 Hasil Pengukuran Tegangan Vin Terhadap Pulsa RC 37
Nomor Judul Halaman Gambar
Gambar 2.1 Motor Brushless 17
Gambar 2.2 Elektronika Speed Control 18 Gambar 2.3 Remote Control 18
Gambar 4.1 Grafik Hubungan Pulsa RC Terhadap Revolution Per Minute
(RPM) Pada Pengujian Motor 34
Gambar 4.2 Grafik Hubungan Tegangan (volt) Terhadap Revolution Per
Minute (RPM) Pada Pengujian Motor 35
Gambar 4.3 Hasil Pengujian Sistem Pemantau 44
xi
DAFTAR LAMPIRAN
Nomor Judul Halaman
Lamp
1. Rangkaian Keseluruhan 50
2. Program Yang Digunakan 53
3. Data Sheet Mikrokontroller ATmega 328 64
4. Data Sheet Accelerometer MMA7260Q 67
5. Dokumentasi Perancangan Sistem Quadcopter 70
ABSTRAK
Telah dirancang sebuah sistem pemantau udara (quadcopter) untuk pemantau yang dapat mengendalikan objek terbang di udara. Sistem quadcopter tersebut memiliki ukuran 30 cm x 30 cm terdiri dari empat buah baling baling (panjang 20.32 cm). Dalam menjaga keseimbangan quadcopter selama bermanufare di udara, digunakan sensor accelerometer MMA7260Q. Remote control memberikan perintah dan ditangkap receiver pada quadcopter, perintah atau data yang diterima oleh receiver diproses oleh mikrokontroller ATmega 328. ATmega 328 membaca data yang diberikan dan memberikan sinyal pada setiap komponen untuk melaksanakan perintah. Quadcopter menggunakan cctv wireless yang dapat merekam objek dan dilengkapi dengan sistem pengiriman dengan pemancar Rf433. Kemudian data yang dikirim ditangkap oleh receiver pada PC. Untuk menghubungkan antara penerima (receiver) dengan Personal Computer (PC) dibutuhkan converter, hal ini dibutuhkan karena pada Personal Computer (PC) tidak mempunyai konektor AV (audio video), oleh sebab itu dibutuhkan easy
capture . Dari hasil pengujian motor, quadcopter mendapatkan respon untuk
terangkat dimulai dari pulsa 77 dengan rata-rata nilai Revolution Per
Minute (RPM) 122.75 dan rata-rata Pulse Width Modulation (PWM) 13.47 Hz.
Dari hasil pengujian kemiringan dapat diketahui bahwa kemiringan tergantung posisi quadcopter.
vi
DESIGNING OF QUADCOPTER FOR AIR MONITORING
SYSTEM BASED WITH ATMEGA 328 MICROCONTROLLER
ABSTRACT
An air monitoring system (quadcopter) that have purposed to monitoring which can control flying object through the air, have been designed. The quadcopter system has a size of 30 cm x 30 cm which consists of four propellers (have length 20.32 cm). To maintaining of quadcopter during manufaring in the air, used MMA7260Q accelerometer sensor. The remote control gives a command and the receiver,it processed by the Atmega 328 microcontroller. The Atmega 328 microcontroller will read input data and signals on every component to execute the command. Quadcopter using wireless cctv to recorded the object and was equipped by a delivery system with RF433 transmitter. Then, data which have been sent, is capture by receiver on PC. To connected the receiver with PC needed a converter , it is needed because PC does not have AV connector (audio video), so that, it would takes the easy capture. From the resulted and analyzed testing of the motor, show that quadcopter response to elevated at pulse which started from 77 with have an average value of Revolution Per Minute (RPM) is 122.7 and average value of Pulse Width Modulation (PWM) is 13.47 Hz. From the resulted of slope testing, it was knew that the slope was depended by quadcopter position.
Keywords: Quadcopter, MMA7260Q accelerometer sensor, Microcontroller ATmega 328, PC, Propeller.
1.1Latar Belakang
Perkembangan sistem ilmu pengetahuan dan teknologi semakin pesat di abad ke-21 ini, khususnya dalam bidang penerbangan. Pada dekade terakhir dunia penerbangan mengalami perkembangan pesat dengan hadirnya kendaraan udara tak berawak atau yang sering disebut dengan Unmanned Aerial Vehicle (UAV). Penggunaan UAV ini bisa dikategorikan secara luas, terutama dalam bidang kemiliteran, pemantauan hutan, pemantauan bencana alam, pemantauan lokasi yang sulit dijangkau, atau pun pemantauan perbatasan wilayah.
Pesawat terbang tanpa awak atau UAV (Unmanned Aerial Vehicle) adalah pesawat udara yang tidak membutuhkan juru terbang (pilot) dan biasanya dikendalikan dengan menggunakan remote control oleh operator yang berada di darat. Salah satu jenis UAV yang sering dibahas dan diteliti saat ini adalah jenis
quadcopter, jenis UAV yang memilik empat motor untuk menggerakkan
propeler/baling-baling.
Pada umumnya quadcopter dikendalikan dengan menggunakan gelombang radio transmitter dari jarak jauh sehingga masih sering mengalami
kesalahan terutama dalam pengiriman perintah. Hal ini terjadi karena frekuensi yang dibutuhkan belum tepat dan bangunan yang dapat menghalangi gelombang radio. Mekanisme landing juga sering terjadi kesalahan, karena mekanisme
landing merupakan salah satu mekanisme paling kritis dalam pengendalian
quadcopter yang membutuhkan keakuratan kecepatan dengan menjaga keseimbangan.
Dalam perancangan sistem pemantau udara (Quadcopter) pada riset ini, ada beberapa peralatan sistem kendali utama yaitu :
1. Sensor accelerometer
2. RC (Remote Control)
Mengatur dalam melakukan pengiriman perintah/data yang dibantu
dengan TX dan RX dalam frekuensi tertentu. 3. CCTV Wireless
Penangkap citra yang digunakan dalam riset ini.
Dibandingkan dengan helicopter dan pesawat terbang sayap tetap,
quadcopter yang dirancang pada riset ini memiliki kelebihan- kelebihan antara
lain sebagai berikut :
1. Quadcopter memiliki 4 baling-baling yang membuat perancangan tidak
rumit dan desain bentuk yang sederhana.
2. Biaya yang digunakan tidak terlalu besar karena bentuk yang sederhana dengan membentuk pola 4 sudut (persegi).
3. Dengan memiliki ukuran baling-baling yang kecil membuat perawatan tidak sulit dan dapat lebih terhindar dari kerusakan baling-baling saat mengalami kecelakaan/benturan terhadap benda lain.
4. Daya motor yang digunakan lebih kecil dibandingkan helicopter dengan satu baling-baling, karena quadcopter memiliki 4 baling-baling yang terdistribusi.
5. Dengan bentuk yang lebih kecil, quadcopter dapat bergerak lebih lincah, dapat bergerak ke segala arah, fleksibel, dan melakukan lepas landas dan pendaratan secara vertikal yang tidak dapat dilakukan oleh helicopter
lainnya. Untuk itu pesawat harus dapat melakukan vertical take off and
landing (VTOL).
6. Quadcopter dilengkapi dengan CCTV wireless yang dapat menangkap
citra yang memudahkan untuk memantau lokasi.
Sebagian besar UAV diaplikasikan untuk kebutuhan militer, seperti pengintaian atau bahkan invasi militer. UAV sangat aplikatif untuk kebutuhan ini dimana kita dapat menyerang atau mengintai wilayah musuh tanpa membahayakan pilot. Atau kita dapat mengambil gambar dari wilayah yang belum diketahui, sebelum kita melewati wilayah tersebut. Tentunya, UAV untuk kebutuhan tersebut dimulai dari UAV untuk keperluan riset yang kemudian dikembangkan untuk aplikasi militer.
Namun, riset tentang UAV belum pernah dikembangkan di FTEK UKSW. Dengan skripsi ini penulis ingin memulai riset tentang UAV dengan merancang
dan merealisasikan sebuah pesawat terbang tanpa awak yang dapat bergerak secara mandiri (autonomous). Dengan adanya riset ini, diharapkan dapat dirancang suatu sistem pemantau objek melalui udara yang optimal. Sehingga aplikasi sistem tersebut bukan hanya pada bidang militer saja tetapi juga untuk bidang-bidang lain (Chalidia, 2013).
1.2 Rumusan Masalah
Rumusan masalah dalam penelitian ini adalah :
1. Bagaimana merancang mekanisme yang dapat mengangkat beban ke udara.
2. Bagaimana merancang sistem kontrol untuk mengendalikan objek terbang.
3. Bagaimana merancang sistem untuk memantau objek melalui udara.
1.3 Batasan Masalah
Untuk membatasi masalah yang akan dibahas dalam penelitian ini, maka diberikan batasan masalah sebagai berikut :
1. Rancangan menggunakan 4 buah motor dan propeler baling-baling. 2. Rangkaian menggunakan mikrokontroller ATmega 328 sebagai
pengendali.
3. Jarak pantau dan kendali maksimum 100 meter.
1.4 Tujuan Penelitian
Tujuan yang ingin dicapai pada tugas akhir ini adalah: 1. Untuk mendesain sistem pemantau udara.
2. Untuk mengetahui pengaruhkemiringan terhadap keseimbangan
quadcopter.
3. Untuk mengetahui pengaruh Revolution Per Minute (RPM) terhadap terangkatnya quadcopter ke udara.
1.5 Manfaat Penelitian
Manfaat dilakukannya penelitian ini adalah :
1. Dapat merancang sistem pemantau udara dengan desain yang terbaru yang sistem kinerjanya optimal.
2. Dapat mengetahui aplikasi sistem pemantau udara dalam berbagai bidang secara luas.
1.6Tempat Penelitian
Penelitian untuk tugas akhir ini dilakukan di Laboratorium Fisika Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara.
1.7Sistematika Penulisan
Penulisan Laporan tugas akhir ini terdiri dari lima bab dengan sistematika sebagai berikut :
Bab 1 Pendahuluan
Bab ini mencakup latar belakang penelitian, batasan masalah yang akan diteliti, tujuan penelitian, manfaat penelitian, tempat penelitian dan sistematika penelitian.
Bab 2 Tinjauan Pustaka
Bab ini membahas tentang landasan teori yang menjadi acuan
untuk proses pengambilan data, analisa data, serta pembahasan dari penelitian yang dilakukan.
Bab 3 Metodologi Penelitian
Bab ini membahas tentang peralatan dan bahan penelitian, diagram penelitian( prosedur penelitian), dan karakterisasi cuplikan yang dilakukan.
Bab 4 Hasil dan Pembahasan
Bab ini membahas tentang data hasil penelitian dan analisa data yang diperoleh dari penelitian.
Bab 5 Kesimpulan
TINJAUAN PUSTAKA
2.1 Quadcopter
Quadcopter adalah salah satu platform unmanned aerial vehicle (UAV) yang saat
ini banyak diriset karena kemampuannya melakukan take-off dan landing secara vertikal dengan menggunakan empat baling-baling (Bresciani, 2008).
2.1.1 Sistem Gerak Quadcopter
Quadcopter memiliki empat baling-baling penggerak yang diposisikan
tegak lurus terhadap bidang datar. Masing-masing rotor (baling-baling dan motor penggeraknya) menghasilkan daya angkat dan memiliki jarak yang sama terhadap pusat massa pesawat. Dengan daya angkat masing-masing rotor sebesar lebih dari seperempat berat keseluruhan, memungkinkan quadcopter untuk terbang. (Daniel, 2012).
2.1.2 Konsep Kendali dan Anatomi Quadcopter
Komponen utama dari quadcopter yaitu fuselage yang merupakan badan
Quadcopter, dimana bagian ini adalah bagian yang paling banyak kegunaannya
pada quadcopter. Baling-baling adalah penghasil gaya angkat pada quadcopter. Penempatan dan penyesuaian motor untuk memberikan stabilitas pada quadcopter
selama melakukan penerbangan. Driver motor merupakan sarana yang mendukung untuk melakukan pergerakan motor dengan memberikan catu daya. Elevator adalah kontrol permukaan yang mengatur gerak naik-turun
quadcopter, ketika elevator (motor) depan turun kebawah maka gaya angkat pada
motor belakang akan bertambah dan menyebabkan motor belakang akan tertarik untuk naik sementara motor depan quadcopter akan turun ke bawah. Aileron adalah kontrol permukaan yang menggontrol gerak quadcopter, sebagai contoh : ketika aileron (motor) sebelah kiri turun ke bawah sedangkan motor kanan ke
atas, maka gaya angkat akan bertambah pada motor sebelah kanan, sedangkan motor sebelah kiri gaya angkatnya akan berkurang yang akan menyebabkan
quadcopter akan bergerak ke arah kiri (Blakelock, 1965).
2.2 Wireless
2.2.1 Komunikasi wireless
Komunikasi wireless terjadi sama seperti teknologi kabel, dalam teknologi kabel dikenal CSMA/CD (carrier sense multiple access/collision detect).
Demikian juga dalam teknologi wireless pun dikenal dengan konsep yang sama. Mekanisme ini untuk menghindari bertabraknnya lalu-lintas paket (packet
collision) yang terjadi. Sistem lalu-lintas data dilakukan menggunakan sistem
untuk mengikuti kondisi ideal adalah dengan menggunakan komunikasi half
duplex. Half duplex adalah komunikasi searah, dalam satu waktu. Jika ada dua
titik terminasi A dan B. Maka dalam satu waktu T data dari titik A dikirim ke B. Setelah pengiriman selesai sempurna, baru terminal B baru bisa mengirim ke A. Tidak bisa dalam waktu satuan sama, secara bersamaan A dan B saling mengirim. Akibatnya akan ada tubrukan dalam lalu-lintas data (collision).
Konsep dasar dari komunikasi wireless adalah mengguanakan frekuensi radio (Radio Frequency atau disingkat RF). Pada hakikatnya teknologi wireless
yang berkembang dewasa ini tidak jauh berbeda dengan teknologi RF pada umumnya yang telah berkembang sebelumnya.
2.2.2 Klasifikasi jaringan wireless
Kita coba melihat kembali ke jaringan dengan teknologi kabel (wired
technology) di mana mengelompokkan jaringan komputer berdasarkan pada
kompleksitas jaringan yang mengacu pada populasi perangkat komputer yang ada. Maka dikenal LAN, MAN, dan WAN maka demikian juga pada teknologi
wireless di mana dasar klasifikasi wireless biasanya berdasarakan jarak yang
a. Wireless PAN
Perangkat ini hanya bisa menjangkau dalam jarak dekat saja, sekitar 10 meter.
WPAN atau kepanjangan dari Wireless Personal Accsess Network
menggunakan teknologi bluetooth, menggunakan protokol 802.15. perangkkat wirelessnya untuk peruntukan untuk keperluan pribadi (personal) yang tidak membutuhkan jarak jauh. WPAN banyak diaplikasikan pada perangkat-perangkat seperti keyboard, mouse, ear phone, cordless scanner, printer dan masih banyak lagi.
b. Wireless LAN untuk kelas SOHO dan home networking.
c. Wireless MAN
Kumpulan WLAN akan membentuk wireless MAN, tidak ada perbedaan mendasarkan protokol yang digunakan. Yang menjadi bedanya adallah kompleksitas atau populasi jaringan wirelessnya. Dalam implementasinya protokol yang direkomendasikan untuk digunakan adalah protokol 802.16, atau bisa disebut WiMAX. WiMAX merupakan standart akses internet
dengan menggunakan band pita lebar yang bekerja menggunakan protokol 802.16. Selain itu WiMAX bisa mentransmisikan gelombang radio (microwave) dengan jarak jauh, bermil/kilometer jauhnya, bisa mencapai 30 miles jauhnya. Dengan demikian sangat mungkin bisa diposisikan sebagai jaringan akses alternatif pengganti jaringan kabel DSL.
d. Wireless WAN
Kumpulan WLAN yang saling berkomunikasi, interkoneksi walaupun tidak dalam satu area yang sama. Secara khusus untuk wireless WAN biasanya lebih mendekati ke teknologi mobile. Pada kenyataanya adalah jelas terlihat bahwa jaringan mobile lebih luas cakupannya secara geografis, misal teknologi GSM, CDMA, layananan 2.5 biasa dikenal dengan GPRS,
kemudian yang sangat berkembang dan diimplementasikan yaitu teknologi 3G. Di mana kecepatan akses jaringan internet bisa dinimakti lewat Hand
phone celuller (Syamsuddin, 2010).
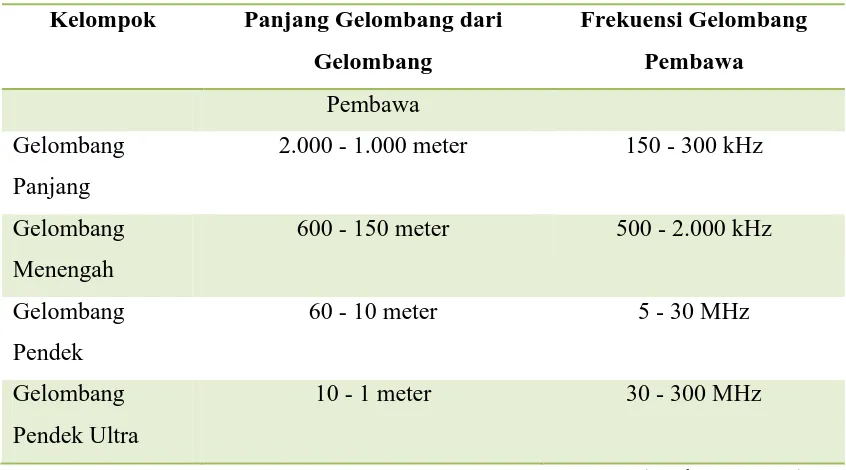
2.3 Gelombang Radio
Gelombang radio yang dipancarkan dari antena pemancar berjalan melalui atmosfer sebagai pemampatan dan pembiasan garis-garis gaya listrik. Panjang
gelombang dari puncak ke puncak atau dari lembah ke lembah disebut “ panjang
gelombang”. Gelombang radio berjalan dari antena dengan kecepatan 3 x 10 8
m/s sama dengan kecepatan cahaya, dengan kata lain gelombang radio berjalan sejauh 7,5 x keliling bumi dalam satu detik.
Bentuk gelombang dari A ke C yang berulang-ulang dengan sendirinya disebut cycle, banyaknya cycle tiap detik disebut frekuensi. Frekuensi satuannya dalam Hertz, biasanya disingkat dengan Hz. Jika panjang gelombang = lamdha
(λ), kepcepatan = v(m/det), dan frekuensi = f (Hz) maka :
Lamdha (λ) = v/f = 3.108
/f = ... meter (m) (2.1) Gelombang yang berfrekuensi rendah mempunyai lamdha yang lebih panjang dan gelombang yang berfrekuensi tinggi mempunyai lamdha lebih pendek.
Gelombang radio terdiri dari :
Tabel 2.1 Panjang Gelombang dan Frekuensi Gelombang Pembawa
Kelompok Panjang Gelombang dari Gelombang
Pada perancangan program pada alat, program yang digunakan adalah pemrograman bahasa C. Berikut penjelasan dasar-dasar pemrograman bahasa C:
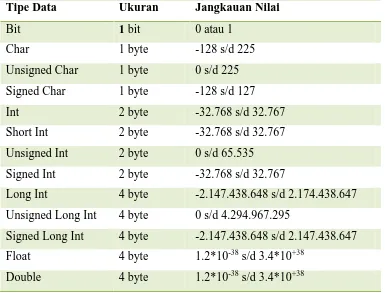
2.4.1 Tipe Data
Berikut ini adalah tipe-tipe data yang ada dalam bahasa C yang dikenali oleh CodeVisionAVR
Tabel 2.2 Tipe Data
(Andi, 2004)
2.4.2 Konstanta dan variabel
Konstanta dan variabel merupakan sebuah tempat untuk menyimpan data yang berada dalam memori. Konstanta berisi data yang nilainya tetap dan tidak dapat diubah selama program dijalankan, sedangkan variabel yang berisi data yang sedang berubah nilainya saat program dijalankan. Untuk membuat suatu
konstanta atau variabel maka kita harus mendeklarisasikan lebih dahulu, yaitu dengan sintaks berikut:
Tipe Data Ukuran Jangkauan Nilai
Bit 1 bit 0 atau 1
Long Int 4 byte -2.147.438.648 s/d 2.174.438.647 Unsigned Long Int 4 byte 0 s/d 4.294.967.295
Signed Long Int 4 byte -2.147.438.648 s/d 2.147.438.647
Char variabelku; Char variabelku=0x20; Bit variabel_bit;
Bit variabel_bit=1;
Pada deklarasi variabel, [nilai_awal] bersifat operasional sehingga boleh diisi dan boleh tidak diisi. Nilai _awal merupakan nilai default variabel tersebut dan jika tidak diisi makan nilai defaultnya adalah 0 (nol). Beberapa variabel dengann tipe yang sama dapat dideklarisasikan dalam satu baris seperti contoh berikut :
Char data_a, data_b, data_c; Komentar
Komentar adalah tulisan yang tidak dianggap senbagai bagian dari tubuh program. Komentar dijelaskan utnuk memberikan penjelasan, imformasi ataupun keterangan-keterangan yang dapat membantu mempermudah untuk memahami kodeprogram baik bagi sipembuat program maupun bagi orang lain yang
membacanya. Komentar yang hanya satu baris ditulis dengan diawali ‟//‟ sedangkan komentar yang lebih dari satu baris diawali dengan „/*‟ dann diakhiri dengan „*/‟.
2.4.3 CodeVision AVR
Code vision AVR merupakan salah satu software compiler yang khusus
digunakan untuk mikrokontroller keluarga AVR. Meskipun code Vision AVR termasuk software komesial, namun kita tetap menggunakannya dengan mudah karena terdapat versi evaluasi yang disediakan secara gratis walaupun dengan kemampuan yang dibatasi. Dari beberapa software kompiler C yang pernah digunakan, CodeVision AVR merupakan yang terbaik jika dibandingkan dengan
kompiler-kompiler yang lain karena memiliki beberapa kelebihan yang memiliki
oleh CodeVision AVR antara lain :
1. Menggunakan IDE (Integrated Devvelopment Environmet)
2. Fasilitas yang disediakan lengkap (mengedit program, mengkompiler program, mendowload program) serta tampilanya terlihat menarik dan mudah dimengerti.
3. Mampu membangkitkann kode program secara otomatis dengan menggunakan fasilitas CodeWizard AVR
4. Memilik fasilitas untuk mendownload program langsing dari CodeVision
AVR dengan hardware khusus seperti Atmel STK, Kanda system
STK200+/300 dan hardware lain yang telah didefenisikan oleh
CodeVisionAVR
5. Memiliki fasilitas debugger sehingga dapat menggunakan software compiler lain untuk mengecek kode CodeVisionAVR
6. Memiliki terminal serial yang terintegrasi dalam CodeVisionAVR sehingga dapat digunakan untuk pengecekan program yang telah dibuat khususnya yang digunakan menggunakan fasilitas komunikasi serial USART (Andi, 2004).
2.5 Baling-Baling (Propeller)
Baling-baling adalah alat yang mengubah gerak putar menjadi daya dorong. Daya dorong inilah yang dimamfaatkan pesawat terbang dan kapal laut sebagai penghasil daya dorong utama. Pembahasan baling-baling ini dibatasi hanya pada parameter baling-baling yang digunakan dalam RC (Radio Control)
aeromodelling.
Ada beberapa parameter penting yang dimiliki baling-baling pada RC
aeromodelling. Parameter-parameter ini bisa dijadikan pedoman untuk memilih
baling-baling sesuai dengan kebutuhan. 1. Diameter dan pitch
disesuaikan dengan motor dan sumber daya yang digunakan. Biasanya produsen motor sudah memberikan spesifikasi baling-baling untuk motornya.
2. Jumlah bilah
Umumnya, jumlah bilah pada baling-baling RC aeromodelling adalah 2 bilah. Tetapi ada beberapa yang menggunakan 3 bilah dan 4 bilah. Semakin bany ak bilah pada baling-baling menyebabkan semakin banyak udara yang disapu sehingga menghasilkan daya dorong yang lebih besar. Biasanya penambahan jumlah bilah bertujuan untuk memperkecil diameter baling-baling, terutamanya untuk menghasilkan performa yang sama (dengan motor yang sama) pitch-nya harus dikurangi.
3. Arah putar
Dengan arah gaya dorong yang sama, baling-baling RC aeromodelling
memiliki dua jenis arah putaran searah jarum jam (CW, Clock Wise) dan berkebalikan arah jarum jam (CCW, Counter Clock Wise). Arah putar ini menentukan yawing moment yang dihasilkan dari baling-baling. Pada
quadcopter, dibutuhkan sepasang baling-baling CW dan CCW agar yawing
moment saling menghasilkan (Daniel, 2012).
2.6 Sensor Accelerometer
Accelerometer adalah sensor yang digunakan untuk mengukur percepatan
atau perubahan kecepatan terhadap waktu. Sensor ini dipasang bersama benda yang akan diukur akslerasinya, seperti mengukur perubahan kecepatan roket yang meluncur atau digunakan untuk analisis getaran (vibration analysis) pada mesin, serta digunakan untuk mendeteksi gerak dan kemiringan pada smart phone. Pada aplikasinya dalam AHRS, accelerometer digunakan sebagai sensor pendeteksi arah percepatan gravitasi yang nantinya akan diolah menjadi sudut kemiringan pesawat terhadap bidang horisontal permukaan bumi (Daniel, 2012).
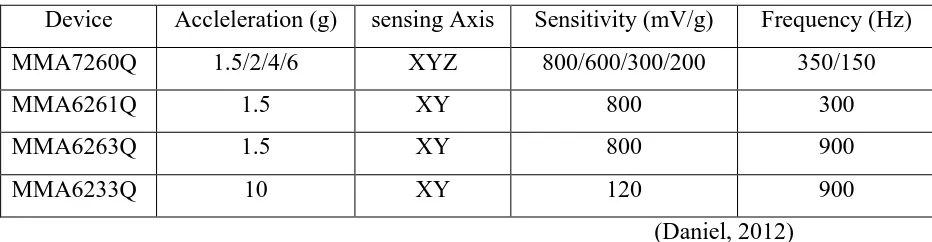
2.6.1 Fitur-fitur Pada Accelerometer
Tabel 2.3 Jenis dan fitur sensor accelerometer
Device Accleleration (g) sensing Axis Sensitivity (mV/g) Frequency (Hz)
MMA7260Q 1.5/2/4/6 XYZ 800/600/300/200 350/150
MMA6261Q 1.5 XY 800 300
MMA6263Q 1.5 XY 800 900
MMA6233Q 10 XY 120 900
(Daniel, 2012)
Sekarang marilah kita melihat lebih dekat pada fungsi sensor yang dapat dicapai melalui penggunaan acclerometer. Mulai dari hal yang memungkinkan pada pengukuran jatuh bebas. Besar g-range akan kira-kira sebesar +/- 1g (Astrom, 2006).
2.6.2 Parameter accelerometer
Ada beberapa parameter penting yang dimiliki accelerometer yang tersedia di pasar. Parameter ini penting untuk diperhatikan dalam memilih tipe
accelerometer untuk diaplikasikan dalam sebuah sistem. Ada beberapa parameter
penting yang dimiliki accelerometer yang tersedia di pasar. Parameter ini penting untuk diperhatikan dalam memilih tipe accelerometer untuk diaplikasikan dalam sebuah sistem.
1. Jumlah Sumbu Pengukuran (axis)
seperti yang telah dibahas sebelumnya, bahwa jumlah sumbu pengukuran ini menentukan kapasitas accelerometer dalam mengukur besar dan arah percepatan.
2. Nilai Skala Penuh (full scale)
Nilai skala penuh merupakan percepatan maksimum yang akan diukur oleh accelerometer. Nilai skala penuh biasanya mempunyai jangkauan positif dan negatif. Parameter ini sangat penting untuk menentukan efektif tidaknya accelerometer yang akan dipilih terhadap aplikasi dimana
3. Antarmuka
Ada dua jenis sistem antarmuka accelerometer untuk berhubungan dengan
unit pengolah, yaitu analog dan digital. Pada antarmuka analog, hasil pengukuran percepatan dipresentasikan dalam tegangan keluaran sedangkan pada antarmuka dgital percepatan hasil pengukuran dipresentasikan dengan data digital. Accelerometer dengan antarmuka digital menggunakan protokol komunikasi banyak dipakai dalam sistem benam seperti I2C(Inter- Integrated Circuit),SPI(Serial Peripheral Interface) dan PWM (Pulse Width Modulation). Di dalam akselerometer dengan keluaran data digital sudah terdapat ADC (Analog Digital
Converter) internal sehingga tidak diperlukan lagi ADC tambahan.
4. Frekuensi cuplik
Besarnya frekuensi cuplik accelerometer merupakan kemampuan
accelerometer untuk memperbaharui data percepatan dalam periode waktu
tertentu. Parameter ini penting untuk diperhitungkan pada aplikasi akselerometer untuk mengukur jarak atau navigasi (Daniel, 2012).
2.7 Motor BLDC (Brushless Direct Current)
Quadcopter membutuhkan penggerak berupa baling-baling yang diputar
oleh motor. Spesifikasi yang harus dipenuhi oleh sistem gerak ini adalah torsi, efisiensi dan getaran yang ditimbulkan oleh berputarnya motor dan baling-baling.
Brushless Direct Current Motor atau biasa disebut BLDC adalah motor DC yang
proses komutasinya tidak menggunakan sikat seperti motor DC pada umumnya. Dibandingkan dengan motor DC dengan sikat, BLDC memiliki beberapa kelebihan yaitu : efisiensi tinggi, kecepatan dan rotasi yang tinggi, respon dinamis yang tinggi, masa operasi yang panjang dan operasi tanpa noise. Sehingga dengan kelebihan-kelebihan tersebut, BLDC banyak digunakan pada aplikasi
aeromodelling dan termasuk pada quadcopter. Motor BLDC adalah tipe motor
sinkron. Artinya, medan magnet yang dihasilkan oleh stator dan medan magnet yang dihasilkan oleh rotor mempunyai frekuensi yang sama. Pada umumnya,
motor BLDC yang banyak tersedia adalah tipe 3 fasa. Untuk berputar penuh,
motor BLDC memiliki 6 langkah komutasi. Setiap langkah komutasi melibatkan 2 kutub yang dieksitasi. Permasalahan yang timbul dalam menjalankan
langkah-langkah komutasi yang harus dilakukan (Daniel, 2012).
Motor brushless merupakan perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk, misalnya memutar propeller. Pemilihan motor brushless ditekankan pada karakteristik motor brushless terebut yaitu dari revolution per minute (RPM), KV, motor, arus yang dikonsumsi, beirat motor daya angkat motor terhadap beban dan harga jual dari motor tersebut.
Gambar 2.1 Motor Brushless (www.scorpionsystem.com)
Penggunaan motor DC brushless dilakukan dengan pertimbangan bahwa unit motor DC brushless memiliki fitur sebagai berikut :
1. Memiliki efisiensi yang tinggi karena menggunakan rotor permanen magnet dan rugi- rugi sekunder yang kecil.
2. Inersia rotor dapat dikurangi, dan diperoleh respon kecepatan yang tinggi. 3. Karena efisiensinya tinggi memungkinkan mengurangi ukuran motor menjadi
lebih kecil
4. Fluktuasi kecepatan akibat perubahan beban kecil (Daniel, 2012).
2.8 Elektronika Speed Control
motor brushless (Chmelai, 2011). Bentuk ESC dapat dilihat pada gambar di bawah.
Gambar 2.2 Elektronika Speed Control (tyastech.blogspot.com)
2.9 Remote Control
Remote control merupakan bagian yang berinteraksi langsung dengan
pengguna untuk memberikan sinyal perintah-perintah untuk menggerakkan robot dalam arah gerakan arah naik, turun, maju, mundur, kiri, kanan. Frekuensi yang digunakan sebagai media transmisi adalah gelombang radio. Pada kondisi outdoor pengguna frekuensi jika dibandingkan dengan menggunakan sinyal infrared sinar matahari sering memberikan gangguan terhadap sinyal infrared yang sangat mempengaruhi proses kendali, maka gelombang radio merupakan pilihan tepat. Selain itu pengguna gelombang radio mempunyai keunggulan
dimana data yang dipancarkan dapat dikirim pada jarak yang cukup jauh bahkan dapat menembus halangan. Dalam perancangan ini jangkauan dibatasi sejauh 50 meter (Markus, 2010).
Gambar 2.3 Remote Control (copterix.perso.rezel.net)
2.10 Wireless CCTV
Camera CCTV memang bermacam-macam. Diantaranya adalah wireless
CCTV . Kamera wireless dengan ukuran super kecil serta mudah dipasang dimana saja.Wireless CCTV mempunyai ukuran yang kecil. Kameranya hanya mempunyai dimensi 3 x 3.5 cm dan dilengkapi dengan 6LED IR untuk aplikasi di
yang ada disekitar kamera tersebut.
Wireless CCTV mudah dipasang, tidak perlu bracket, cukup diletakkan saja atau ditempel. Kamera wireless yang satu ini juga dapat disamarkan dengan barang lainnya. Wireless CCTV ini mempunyai jangkauan yang cukup jauh. Jangkauan camera ke receiver kurang lebih 15 meter. Menggunakan gelombang radio 1,2 GHz.
Kelebihan menggunakan wireless CCTV :
- Mudah dipindah kemanapun yang kamu inginkan.
- Pemakaian daya kecil namun sensitif serta gampang untuk digunakan.
- Karena tanpa kabel, tidak akan terjadi resiko kabel dipotong dan putus (koneksi diputus).
- Lebih aman serta lebih tersembunyi sebab bentuk kamera sangat kecil. Ini otomatis akan memperkecil kemungkinan terjadinya pengerusakan pada kamera system (http ://www.tokoone.com/wireless-cctv/).
2.11 Pengukuran Sudut Kemiringan
keluarannya tidak linear, jadi fungsi sinus harus dipakai dalam persamaan. Sangat penting untuk dicatat bahwa karena keluaran tidak linear, orientasi pemasangan
yang didapat sangat sensitif ketika akses penyensoran paralel dengan permukaan bumi (Anderson, 2005).
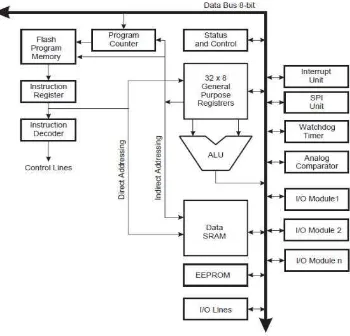
2.12 Mikrokontroller ATmega 328
2.12.1 Fitur Mikrokontroller ATmega 328
ATMega328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer). Mikrokontroller ini memiliki beberapa fitur antara lain :
1. 130 macam instruksi yang hampir semuanya dieksekusi dalam satu siklus clock.
2. 32 x 8-bit register serba guna.
3. Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
4. 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai bootloader.
5. Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanent
karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
6. Memiliki SRAM (Static Random Access Memory) sebesar 2KB.
7. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation) output.
8.
Master / Slave SPI Serial interface.
Gambar 2.4 Tampilan Architecture ATmega 328
(repository.usu.ac.id/bitstream/123456789/35001/4/Chapter%20II.pdf)
2.12.2 Konfigurasi ATmega 328
Gambar 2.5 Konfigurasi Pin ATmega 328
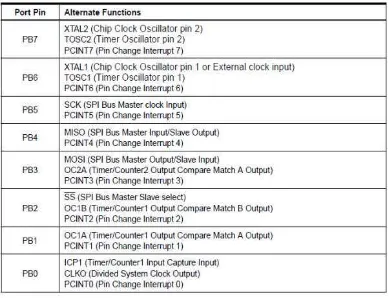
Gambar 2.6 Konfigurasi Port B
(repository.usu.ac.id/bitstream/123456789/35001/4/Chapter%20II.pdf)
Gambar 2.7 Konfigurasi Port C
(repository.usu.ac.id/bitstream/123456789/35001/4/Chapter%20II.pdf)
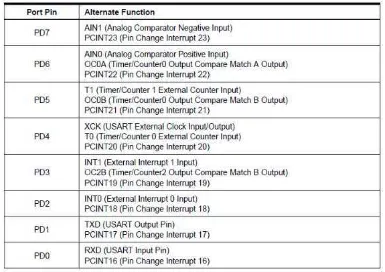
Gambar 2.8 Konfigurasi Port D
PERANCANGAN ALAT DAN SISTEM
3.1 Diagram Blok
Secara garis besar, diagram blok rangkaian ditunjukkan pada gambar berikut ini :
Accelorometer
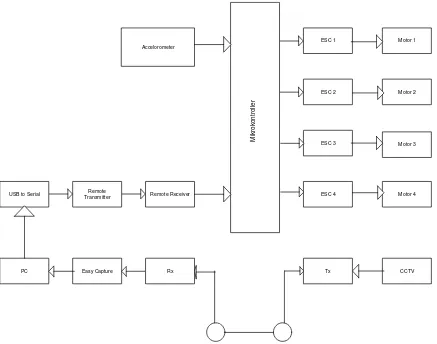
Gambar 3.1 Diagram blok sistem kendali Quadcopter
Keterangan gambar 3.1 :
ESC 1 : Elektronika Speed Control 1
Berfungsi untuk memberikan sinyal pada motor 1. ESC 2 : Elektronika Speed Control 2
Berfungsi untuk memberikan sinyal pada motor 2.
ESC 3 : Elektronika Speed Control 3
Berfungsi untuk memberikan sinyal pada motor 3.
ESC 4 : Elektronika Speed Control 4
Berfungsi untuk memberikan sinyal pada motor 4.
RX : Receiver (penerima)
TX : Transmitter (pengirim)
TV : Television (monitor/ PC)
Berfungsi untuk menampilkan hasil rekaman dari CCTV. CCT : Close Circuit Television
Berfungsi untuk merekam objek .
Accelerometer : Sensor yang berfungsi untuk mengukur kecepata benda.
Diagram blok di atas menjelaskan aliran proses input-output, yaitu mulai dari perintah yang diberikan oleh user melalui remote control. Data yang dikirim secara wireless diterima oleh bagian penerima radio dan diverifikasi oleh mikrokontroler sebagai perintah untuk mengendalikan motor penggerak. Sinyal dikeluarkan mikrokontroler ke rangkaian driver untuk menjalankan motor dengan kecepatan tertentu. Pada bagian sistem pemantauan terdapat sebuah CCTV
wireless yang menerima gambar dan mengirimkan ke bagian pemantauan yaitu
pada sebuah PC.
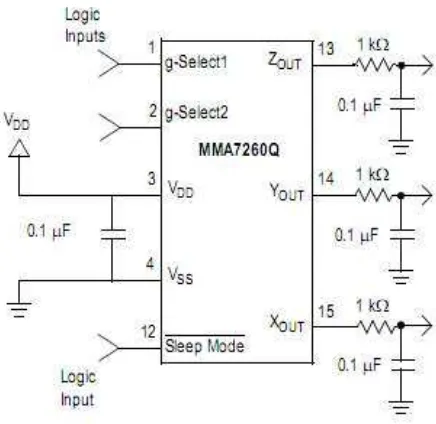
3.2 Rangkaian Accelerometer MMA7260Q
Pada tugas akhir ini digunakan sensor accelerometer MMA7260Q dengan tiga sumbu pengukuran, yaitu terhadap sumbu x, sumbu y, dan sumbu z. Sensor
accelerometer ini digunakan untuk mengukur percepatan benda dalam satuan
gravitasi (g). Sensor ini dapat mengukur percepatan dari -1,5 g sampai 6 g. Sensor
accelerometer MMA7260Q dengan rangkaian pendukung yang terintegrasi dapat
Gambar 3.2 Rangkaian accelerometer MMA7260Q
Pada sensor accelerometer MMA7260Q ini memiliki fasilitas g-select yang memungkinkan sensor bekerja pada tingkat sensitivitas yang berbeda-beda. Penguatan internal pada sensor akan berubah sesuai dengan tingkat sensitivitas yang dipilih, yaitu 1,5 g, 2 g, 4 g, atau 6 g. Pemilihan tingkat sensitivitas ini dilakukan dengan memberikan input logika pada pin g-select1 dan g- select2. Diskripsi pemilihan tingkat sensitivitas pada sensor accelerometer MMA7260Q dapat diamati pada tabel 3.1
Tabel 3.1 Diskripsi tingkat sensitivitas accelerometer MMA7260Q
g-select 1 g-select 2 g-Range Sensitivity
0 0 1,5 g 800 mV/g
0 1 2,0 g 600 mV/g
1 0 4,0 g 300 mV/g
1 1 6,0 g 200 mV/g
Sensor accelerometer MMA7260Q dapat digunakan untuk mengukur baik percepatan positif maupun percepatan negatif. Ketika sensor dalam keadaan diam, keluaran sensor pada sumbu x akan menghasilkan tegangan offset yang besarnya setengah dari tegangan masukan sensor (Vdd). Tegangan offset accelerometer
dipengaruhi oleh orientasi sensor dan percepatan statis tiap sumbu akibat gaya gravitasi bumi. Untuk percepatan positif maka sinyal keluaran akan meningkat di
atas tegangan offset, sedangkan untuk percepatan negative sinyal keluaran akan semakin menurun di bawah tegangan offset.
3.3 Rangkaian Mikrokontroller ATmega 328
Rangkaian ini berfungsi untuk mengendalikan seluruh sistem. Komponen utama dari rangkaian ini adalah IC mikrokontroller ATmega 328. Pada IC ini semua program diisikan, sehingga rangkaian dapat berjalan sesuai dengan yang diinginkan. Rangkaian mikrokontroller ditunjukkan pada gambar 3.3
Gambar 3.3 Rangkaian Mikrokontroller ATmega 328
3.4 Rangkaian ESC (Electronic Speedy Control)
Electronika Speed Control dapat dikatakan juga dengan driver motor.
Rancangan ini berfungsi untuk menggerakan motor brushless yang kemudian bertujuan untuk memutar propeller.
Gambar 3.4 Rangkain Electronika Speed Control
Motor brushless memiliki sebuah ESC (Electronika Speed Control) yang berfungsi sebagai pengatur kecepatan motor, selain itu juga berfungsi untuk menaikan jumlah arus yang diperlukan oleh motor. Kecepatan untuk motor yang keluar dari ESC diatur melalui pulsa dari mikrokontroler.
3.5 Rangkaian Pemancar Rf433
Pemancar Rf433 berfungsi untuk mengirimkan data dari transmitter ke receiver yang kemudian akan ditangkap oleh mikrokontroller, selanjutnya akan diproses untuk menjadi sebuah perintah. Untuk dapat menampilkan citra yang
ditangkap oleh camera ke PC diperlukan alat bantu easy cap. Gambar pemancar Rf433 dapat dilihat pada gambar 3.5
433 Tx
Gambar 3.5 (a). Pemancar Rf433, (b) modul pemancar Rf433 Data yang dikirim secara wireless diterima oleh bagian penerima radio dan diverifikasi oleh mikrokontroler sebagai perintah untuk mengendalikan motor penggerak. Sinyal dikeluarkan mikrokontroler ke rangkaian driver untuk
menjalankan motor dengan kecepatan tertentu. Pada bagian sistem pemantauan terdapat sebuah CCTV wireless yang menerima gambar dan mengirimkan ke bagian pemantauan yaitu pada sebuah PC
3.6 Rangkaian Motor Brushless
Motor brushless berfungsi untuk menggerakkan propeller dengan mengubah energi listrik menjadi energi kinetik.
BATTERY
ESC
motor
3.7 Perancangan Mekanik Quadcopter
Bentuk dari quadcopter dalam tugas akhir ini berbentuk persegi, dimana setiap sisi-sisinya memiliki ukuran yang sama. Setiap sisi memiliki ukuran 30 x 30 cm. Bahan pembuatan quadcopter terbuat dari allumunium dan plastik, karena kedua bahan tersebut memiliki massa yang ringgan dan daya angkat yang tinggi. Sehingga memudahkan dalam memanufare setiap perintah yang diberikan melalui RC (Remote Control). Kedudukan propeller disesuaikan dengan putaran arah jarum jam dan berlawanan arah jarum jam. Bentuk quadcopter dapat dilihat pada gambar 3.7
Gambar 3.7 Rancangan Mekanik Quadcopter
Arah putaran propeller harus disesuaikan dengan posisi setiap propeller. Hal ini bertujuan untuk menjaga keseimbangan quadcopter ketika beroperasi diudara. Arah putaran propeller (1 dan 2) mengikuti arah jarum jam (CW) dan arah putaran propeller (3 dan 4) berlawan dengan arah jarum jam (CCW).
3.8 Perancangan Sistem Pemantau
Sistem pemantau diperlukan untuk memantau kondisi lingkungan, untuk perancangan quadcopter digunakan kamera cctv wireless yang secara langsung dapat dilihat hasil pemantau yang berupa video yang ditampilkan PC. Sistem rancangan ditunjukkan oleh gambar 3.8
30 cm
30 cm
203.2mm
CCTV wireless Receiver PC
Gambar 3.8 Rancangan Sistem Pemantau
Sistem pemantauan merupakan cctv wireless yang dapat merekam objek dan dilengkapi dengan sistem pengiriman dengan pemancar Rf433. Kemudian data yang dikirim ditangkap oleh receiver. Untuk menghubungkan antara penerima (receiver) dengan laptop dibutuhkan converter, hal ini dibutuhkan karena pada PC tidak mempunyai konektor AV (audio video), oleh sebab itu dibutuhkan easy capture seperti gambar 3.9
Gambar 3.9 Easy Capture
3.9 Rangkaian Remote Control (RC)
Remote Control berfungsi untuk memberikan perintah dalam bentuk
kendali terhadap putaran motor dan arah quadcopter. Rangkaian remote control
dapat dilihat pada gambar 3.10
+5V
Gambar 3.10 Tombol untuk remote control
3.9 Diagram Alir Penelitian
Start
Baca sinyal RC
Perintah
Gerakkan Brushless mode
Baca Accelerometer
Kondisi = stabil
Stabilan Body
ya tidak
HASIL DAN PEMBAHASAN
4.1 Pengujian Motor
Pengujian motor bertujuan untuk mengetahui beberapa besar kecepatan putaran motor dalam satuan RPM (Revolution Per Minute). Pengujian ini dilakukan dengan menggunakan alat tachnometer. Hasil pengujian ditunjukkan pada tabel 4.1
Tabel 4.1 Hasil pengukuran pulsa dari RC dengan RPM motor Brushless
Pulsa dari RC
Putaran Motor (RPM) PWM
Dari gambar 4.1 diketahui bahwa penambahan pulsa RC berbanding lurus terhadap kenaikan nilai RPM pada motor 1, motor 2, motor 3 dan motor 4.
Diperoleh rata-rata RPM untuk motor 1 sebesar 146,4 RPM, motor 2 sebesar 147,6 RPM, motor 3 sebesar 147,55 RPM, dan motor 4 sebesar 148,3 RPM. Dari grafik juga dapat diketahui bahwa nilai RPM maksimum berada pada motor 4 dan nilai RPM minimum berada pada motor 1.
Hasil pengujian terhadap pengukuran tegangan dengan putaran motor dijelaskan pada tabel 4.2
Tabel 4.2 Hasil Pengukuran Tegangan Mikrokontroller Terhadap Motor Brushless
Tegangan (volt)
Putaran Motor (RPM) PWM
Motor 1 Motor 2 Motor 3 Motor 4
Gambar 4.2 Grafik hubungan tegangan (volt) terhadap Revolution Per Minute
Dari gambar 4.2 diketahui bahwa nilai tegangan berbanding lurus terhadap kenaikan nilai RPM pada motor 1, motor 2, motor 3 dan motor 4. Diperoleh
rata-rata RPM untuk motor 1 sebesar 146,4 RPM, motor 2 sebesar 147,6 RPM, motor 3 sebesar 147,55 RPM, dan motor 4 sebesar 148,3 RPM. Dari grafik juga dapat diketahui bahwa nilai RPM maksimum berada pada motor 4 dan nilai RPM minimum berada pada motor 1.
Hasil pengukuran tegangan (Vin) terhadap pulsa RC yang diberikan, dapat dihitung dengan menggunakan persamaan 4.1 dan hasilnya terlihat pada tabel 4.3
(Vin) = x (4.1)
Dengan : Vadc = Pulsa RC ( Volt) Vin = Tegangan input ( Volt) Vref = Tegangan tetap ( 5 Volt)
Tabel 4.3 Hasil Pengukuran Tegangan Vin terhadap Pulsa RC
Pulsa RC V ref V in
Pengujian motor dengan menggunakan program : Program mengendalikan 1 motor brushless
esc1.attach(9); }
void loop() {
int throttle = analogRead(throttlePin); throttle = map(throttle, 0, 1023, 0, 179); esc1.write(throttle);
}
Program ini bertujuan untuk membuat brushless pada pin 9 berputar.
throttle = map(throttle, 0, 1023, 0, 179); esc1.write(throttle);
esc2.write(throttle); esc3.write(throttle); esc4.write(throttle); }
Program ini bertujuan untuk membuat brushless pada pin 9, 10, 11 dan 3 berputar.
4.2 Pengujian Sensor Accelerometer MMA7260Q
Pengujian Sensor Accelerometer MMA7260Q bertujuan untuk mendeteksi arah percepatan gravitasi yang nantinya akan diolah menjadi sudut kemiringan pesawat terhadap bidang horisontal permukaan bumi. Dimana pengujian kemiringan Quadcopter tersebut hanya dilakukan pada sumbu-x dan sumbu-y. Hasil pengujian sensor tersebut adalah sebagai berikut :
4.2.1 Hasil pengujian Quadcopter pada posisi stabil
Pada posisi stabil, nilai kemiringan pada sumbu-x dan sumbu-y memiliki nilai yang signifikan, dimana sumbu-x memiliki nilai kemiringan sekitar 3500 -3540 dan sumbu-y sekitar 3510-3550.
4.2.2 Hasil pengujian Quadcopter pada posisi miring ke kanan
Pada posisi miring ke kanan, nilai kemiringan pada sumbu-x lebih besar daripada nilai kemiringan sumbu-y, dimana sumbu-x memiliki nilai kemiringan sekitar 4180-4250 dan sumbu-y sekitar 3590-3630.
Pada posisi miring ke kiri, nilai kemiringan pada sumbu-x lebih kecil daripada nilai kemiringan sumbu-y, dimana sumbu-x memiliki nilai kemiringan
sekitar 2510-2550 dan sumbu-y sekitar 3480-3520.
4.2.4 Hasil pengujian Quadcopter pada posisi condong ke depan
Pada posisi condong ke depan, nilai kemiringan pada sumbu-x lebih kecil daripada nilai kemiringan sumbu-y, dimana sumbu-x memiliki nilai kemiringan sekitar 3100-3510 dan sumbu-y sekitar 4400-4650.
4.2.5 Hasil pengujian Quadcopter pada posisi condong ke belakang
Pada posisi condong ke belakang, nilai kemiringan pada sumbu-x lebih besar daripada nilai kemiringan sumbu-y, dimana sumbu-x memiliki nilai
kemiringan sekitar 3520-3560 dan sumbu-y sekitar 2790-2840.
4.2.6 Hasil pengujian Quadcopter pada posisi serong kanan depan
Pada posisi serong kanan depan, nilai kemiringan pada sumbu-x lebih kecil daripada nilai kemiringan sumbu-y, dimana sumbu-x memiliki nilai kemiringan sekitar 3950-4010 dan sumbu-y sekitar 4240-4290.
Pada posisi serong kiri depan, nilai kemiringan pada sumbu-x lebih kecil daripada nilai kemiringan sumbu-y, dimana sumbu-x memiliki nilai kemiringan
sekitar 3040-3140 dan sumbu-y sekitar 4080-4130.
4.2.8 Hasil pengujian Quadcopter pada posisi serong kanan belakang
Pada posisi serong kanan belakang, nilai kemiringan pada sumbu-x lebih besar daripada nilai kemiringan sumbu-y, dimana sumbu-x memiliki nilai kemiringan sekitar 4040-4090 dan sumbu-y sekitar 2820-2900.
4.2.9 Hasil pengujian Quadcopter pada posisi serong kiri belakang
Pada posisi serong kiri belakang, nilai kemiringan pada sumbu-x lebih kecil daripada nilai kemiringan sumbu-y, dimana sumbu-x memiliki nilai
kemiringan sekitar 3000-3070 dan sumbu-y sekitar 3060-3100.
Pengujian sensor accelerometer dengan menggunakan program : const int analogInPin1 = A0;
const int analogInPin2 = A1; const int analogInPin3 = A2;
int sensorValue1 = 0;
sensorValue1 = analogRead(analogInPin1); sensorValue2 = analogRead(analogInPin2); sensorValue3 = analogRead(analogInPin3);
Serial.print("sensor1 = " ); Serial.print(sensorValue1);
Serial.print(" sensor2 = " );
4.3 Pengujian Sistem Pemantau
Pengujian ini bertujuan untuk memantau objek dari udara. Hasil pengujian dapat dilihat pada gambar 4.3
Gambar 4.3 Hasil Pengujian Sistem Pemantau
Objek yang direkam oleh camera wireless dikirim ke receiver melalui transmitter. Data objek yang diterima oleh receiver ditampilkan di PC dengan bantuan alat easy cap.Easy cap berfungsi untuk membantu hasil rekaman camera
wireless ke PC, jika rekamanan camerwa wireless diterima receiver dan
dihubungkan ke PC tanpa easy cap maka hasil rekaman objek tidak terbaca di PC. Pengujian sistem pemantau dengan menggunakan program :
#include <RCSwitch.h>
RCSwitch mySwitch = RCSwitch();
void setup() { Serial.begin(9600);
mySwitch.enableReceive(0); }
void loop() {
if (mySwitch.available())
{
int value = mySwitch.getReceivedValue();
if (value == 0) {
Serial.print("Unknown encoding"); } else {
Serial.print(mySwitch.getReceivedValue()); Serial.println("");
}
mySwitch.resetAvailable(); }}
Program ini akan membaca data yang masuk dari pemancar, selanjutnya data tersebut dikirimkan melalui port serial agar dapat dilihat di computer.
4.4 Pengujian Mikrokontroller ATmega 328
Pengujian ini dilakukan untuk mengetahui apakah rangkaian mikrokontroller telah berjalan dengan baik atau tidak. Selanjutnya dengan memberikan program sederhana ke mikrokontroller. Programnya sebagai berikut :
void setup() {
KESIMPULAN DAN SARAN
5.1Kesimpulan
Berdasarkan hasil perancangan alat dan analisis yang telah dilakukan, maka dapat diambil kesimpulan bahwa :
1. Sistem pemantau udara (Quadcopter) telah berhasil didesain dengan menggunakan empat buah propeller yang dapat mengangkat quadcopter
dengan baik, dimana pada quadcopter terdapat camera cctv ynag berfungsi sebagai sistem pemantau untuk menangkap gambar dan kemudian mengirimkan gambar kepada receiver untuk ditampilkan pada PC dengan menggunakan bantuan easy capture.
2. Sudut kemiringan ditentukan oleh besarnya pergeseran terhadap sumbu-x dan sumbu-y. Semakin besar sudut kemiringan maka keseimbangan
quadcopter tidak stabil. Perubahan kemiringan tersebut, yaitu :
a. Quadcopter pada posisi stabil
sumbu-x memiliki nilai kemiringan sekitar 3500-3540 dan sumbu-y sekitar 3510-3550.
b. Quadcopter pada posisi miring ke kanan
sumbu-x memiliki nilai kemiringan sekitar 4180-4250 dan sumbu-y sekitar 3590-3630.
c. Quadcopter pada posisi miring ke kiri
sumbu-x memiliki nilai kemiringan sekitar 2510-2550 dan sumbu-y sekitar 3480-3520.
d. Quadcopter pada posisi condong ke depan
sumbu-x memiliki nilai kemiringan sekitar 3100-3510 dan sumbu-y sekitar 4400-4650.
e. Quadcopter pada posisi condong ke belakang
sumbu-x memiliki nilai kemiringan sekitar 3520-3560 dan sumbu-y sekitar 2790-2840.
3. Kecepatan putaran motor terhadap quadcopter sangat berpengaruh. Semakin tinggi Revolution Per Minute (RPM) maka quadcopter akan
semakin terangkat ke atas. Bahwa penambahan pulsa RC berbanding lurus terhadap kenaikan nilai RPM pada motor 1, motor 2, motor 3, motor 4. Diperoleh rata-rata RPM untuk motor 1 sebesar 146,4 RPM, motor 2 sebesar 147,6 RPM, motor 3 sebesar 147, 55 RPM, dan motor 4 sebesar 148,3 RPM.
5.2Saran
1. Untuk penelitian selanjutnya, sebaiknya dilakukan pengujian thrust yang bertujuan untuk mengetahui besar beban maksimum yang bisa angkat
quadcopter tersebut.
2. Untuk penelitian selanjutnya, sebaiknya quadcopter dilengkapi dengan sensor Gyroscope yang berfungsi sebagai sensor keseimbangan.
Andi, Oratomo. 2004. Panduan Praktis Pemograman AVR Mikrokotroller AT90S2313. Andi Offset : Yogjakarta.
Anderson Jr. J. 2005. Introduction to Flight. Mc graw Hill, Co. New York.
Astrom, Karl Johan. 2006. Feedback System: An Introduction for Scientist and Engineer. Lund Institute of Technology. California.
Blakelock, John H. 1965. Automatic Control of Aircraft and Missiles. John Willey and Sons, Inc. New York.
Bresciani, Tommaso. 2008. Modelling, Identification and Control of a Quadrotor Helicopter. Departement of Automatic Control Lund University.
Chalidia, Hamdani. 2013. Perancangan Autonomous Landing Pada Quadcopter
Menggunakan Behavior-Based Intelligent Fuzzy Control. ITS : Surabaya.
Chmelai, Pavel. 2011. Building ang Controlling the Quadcopter: Online : http://pernerscontacts. upce. Cz/24_2011/chmelar.pdf.
Daniel, Kristianto. 2012. Rancang Bangun Pesawat Terbang Mandiri Tanpa Awak dengan Empat Baling Baling Penggerak ( AUTONOMOUS QUADCOPT). Univesitas Kristen Satya Wacana : Salatiga.
Domingues. 2009. Jorge M.B. Quadrotor Prototype. Uneversidade Tecnica deLisboa. Dissertacio.
Markus, Achtelik, Dkk. 2010. Jurnal :Visual Tracking and Controll of a Quadcopter using a Stereo Camera System and Inertial Sensors. Online : http://www.lsr.ei.tum.de/fileadmin/publications/kuehnlenz/achtelik_2009 cma.pdf.
Rachman. 1998. Hubungan Propogasi Gelombang Radio dengan Antena. Jurnal.
Syamsuddin M. 2010. Cara Cepat Belajar Infrastruktur Jaringan Wireless (Tutorial Singkat Jaringan Wireless). Gaya Media : Yogjakarta.
repository.usu.ac.id/bitstream/123456789/35001/4/Chapter%20II.pdf
Diakses tanggal 29 September 2014, Pukul : 21.00
www.scorpionsystem.com
Diakses tanggal 03 September 2014, Pukul : 22.00
tyastech.blogspot.com
Diakses tanggal 05 September 2014, Pukul : 21.35
copterix.perso.rezel.net
Diakses tanggal 05 September 2014, Pukul : 21.40
http ://www.tokoone.com/wireless-cctv
LAMPIRAN 1
Rangkaian Keseluruhan
LAMPIRAN 2
int inByte = 0;
State_tbl_k = digitalRead(tbl_k); State_tbl_l = digitalRead(tbl_l); State_tbl_m = digitalRead(tbl_m); State_tbl_n = digitalRead(tbl_n);
State_tbl_g = digitalRead(tbl_g); State_tbl_h = digitalRead(tbl_h); State_tbl_i = digitalRead(tbl_i); State_tbl_j = digitalRead(tbl_j);
State_tbl_e = digitalRead(tbl_e); State_tbl_s = digitalRead(tbl_s); State_tbl_f = digitalRead(tbl_f);
if (State_tbl_k == LOW) {kirim_data=11; inByte = 0;} if (State_tbl_l == LOW) {kirim_data=12; inByte = 0;} if (State_tbl_m == LOW) {kirim_data=13; inByte = 0;} if (State_tbl_n == LOW) {kirim_data=14; inByte = 0;}
if (State_tbl_g == LOW) {kirim_data=7; inByte = 0;} if (State_tbl_h == LOW) {kirim_data=8; inByte = 0;} if (State_tbl_i == LOW) {kirim_data=9; inByte = 0;} if (State_tbl_j == LOW) {kirim_data=10; inByte = 0;}
if (State_tbl_e == LOW) {kirim_data=5; inByte = 0;} if (State_tbl_s == LOW) {kirim_data=15; inByte = 0;} if (State_tbl_f == LOW) {kirim_data=6; inByte = 0;}
Program Pada Quadcopter
#include <Servo.h> #include <RCSwitch.h>
RCSwitch mySwitch = RCSwitch();
const int analogInPin1 = A1; const int analogInPin2 = A3;
int sensorValue1 = 0; mySwitch.enableReceive(0); }
void loop() {
if (mySwitch.available()) {
int value = mySwitch.getReceivedValue(); if(value==1)
{rpm_belakang_kanan=rpm_belakang_kanan+0.3; rpm_belakang_kiri=rpm_belakang_kiri+0.3; value=0;} if(value==2)
{rpm_depan_kiri=rpm_depan_kiri+0.3;
rpm_belakang_kiri=rpm_belakang_kiri+0.3; value=0;} if(value==4)
{rpm_depan_kanan=rpm_depan_kanan+0.3;
rpm_belakang_kanan=rpm_belakang_kanan+0.3; value=0;} if(value==5)
{rpm_depan_kanan=rpm_depan_kanan+0.3; rpm_belakang_kanan=rpm_belakang_kanan+0.3; rpm_depan_kiri=rpm_depan_kiri+0.3;
rpm_belakang_kiri=rpm_belakang_kiri+0.3; value=0;} if(value==6)
{rpm_depan_kanan=rpm_depan_kanan-0.3; rpm_belakang_kanan=rpm_belakang_kanan-0.3;
rpm_depan_kiri=rpm_depan_kiri-0.3; rpm_belakang_kiri=rpm_belakang_kiri-0.3; value=0;}
if(value==7){rpm_depan_kiri=rpm_depan_kiri+0.3; value=0;}
if(value==8 && rpm_depan_kiri!=0){rpm_depan_kiri=rpm_depan_kiri-0.3; value=0;}
if(value==9){rpm_belakang_kiri=rpm_belakang_kiri+0.3; value=0;} if(value==10 &&
rpm_belakang_kiri!=0){rpm_belakang_kiri=rpm_belakang_kiri-0.3; value=0;} if(value==11){rpm_depan_kanan=rpm_depan_kanan+0.3; value=0;}
if(value==12 &&
rpm_depan_kanan!=0){rpm_depan_kanan=rpm_depan_kanan-0.3; value=0;} if(value==13){rpm_belakang_kanan=rpm_belakang_kanan+0.3; value=0;} if(value==14 &&
rpm_belakang_kanan!=0){rpm_belakang_kanan=rpm_belakang_kanan-0.3; value=0;}
if(value==15){rpm_depan_kanan=0; rpm_belakang_kanan=0; rpm_depan_kiri=0; rpm_belakang_kiri=0; value=0;}
esc_depan_kanan.write(rpm_depan_kanan); esc_belakang_kiri.write(rpm_belakang_kiri); esc_belakang_kanan.write(rpm_belakang_kanan); esc_depan_kiri.write(rpm_depan_kiri);
mySwitch.resetAvailable(); }}
Start
#include <RCSwitch.h> RCSwitch myswitch = RCSwitch();
Const int tbl_ = ... ;
Void setup() { Serial.begin(9600); PinMode(tbl_ , INPUT);
Void loop(){
State_tbl_ = digitalRead(tbl_ );
manufare
finish
Pembacaan program
Ya Tidak
Gambar Flowchart Program Kendali Pada Remote
Start
#include<servo.h> #include<RCSwitch.h> RCSwitch mySwitch = RCSwitch();
Const int analogInPin1 = A1;
Void setup(){ Serial.begin(9600); Esc_..._...attach(...);
Void loop() { If (mySwitch.available() { Int value = mySwitch.getReceivedValue();
If(value == ...) {rpm_..._... =rpm_..._...;
manufare
finish
Pembacaan Program
Ya Tidak