LAMPIRAN 1
LAMPIRAN 2
Program Kendali Pada Remote
#include <RCSwitch.h>
RCSwitch mySwitch = RCSwitch();
int inByte = 0; int kirim_data=0;
void setup() { Serial.begin(9600);
pinMode(tbl_k, INPUT);
mySwitch.enableTransmit(13); }
void loop(){
State_tbl_k = digitalRead(tbl_k); State_tbl_l = digitalRead(tbl_l); State_tbl_m = digitalRead(tbl_m); State_tbl_n = digitalRead(tbl_n);
State_tbl_g = digitalRead(tbl_g); State_tbl_h = digitalRead(tbl_h); State_tbl_i = digitalRead(tbl_i); State_tbl_j = digitalRead(tbl_j);
State_tbl_e = digitalRead(tbl_e); State_tbl_s = digitalRead(tbl_s); State_tbl_f = digitalRead(tbl_f);
if (State_tbl_k == LOW) {kirim_data=11; inByte = 0;} if (State_tbl_l == LOW) {kirim_data=12; inByte = 0;} if (State_tbl_m == LOW) {kirim_data=13; inByte = 0;} if (State_tbl_n == LOW) {kirim_data=14; inByte = 0;}
if (State_tbl_g == LOW) {kirim_data=7; inByte = 0;} if (State_tbl_h == LOW) {kirim_data=8; inByte = 0;} if (State_tbl_i == LOW) {kirim_data=9; inByte = 0;} if (State_tbl_j == LOW) {kirim_data=10; inByte = 0;}
if (State_tbl_e == LOW) {kirim_data=5; inByte = 0;} if (State_tbl_s == LOW) {kirim_data=15; inByte = 0;} if (State_tbl_f == LOW) {kirim_data=6; inByte = 0;}
if (State_tbl_a <=500) {kirim_data=1; inByte = 0;} if (State_tbl_b <=500) {kirim_data=2; inByte = 0;} if (State_tbl_c <=500) {kirim_data=3; inByte = 0;} if (State_tbl_d <=500) {kirim_data=4; inByte = 0;}
mySwitch.send(kirim_data, 8); inByte = 0;
Program Pada Quadcopter
#include <Servo.h> #include <RCSwitch.h>
RCSwitch mySwitch = RCSwitch();
const int analogInPin1 = A1; const int analogInPin2 = A3;
int sensorValue1 = 0; int sensorValue2 = 0;
double rpm_depan_kanan=0; double rpm_depan_kiri=0; double rpm_belakang_kanan=0; double rpm_belakang_kiri=0;
Servo esc_depan_kanan; Servo esc_belakang_kiri; Servo esc_belakang_kanan; Servo esc_depan_kiri;
void setup() { Serial.begin(9600);
esc_depan_kanan.attach(9); esc_belakang_kiri.attach(10); esc_belakang_kanan.attach(11); esc_depan_kiri.attach(3); mySwitch.enableReceive(0); }
void loop() {
if (mySwitch.available()) {
int value = mySwitch.getReceivedValue(); if(value==1)
{rpm_belakang_kanan=rpm_belakang_kanan+0.3; rpm_belakang_kiri=rpm_belakang_kiri+0.3; value=0;} if(value==2)
{rpm_depan_kiri=rpm_depan_kiri+0.3;
rpm_belakang_kiri=rpm_belakang_kiri+0.3; value=0;} if(value==4)
{rpm_depan_kanan=rpm_depan_kanan+0.3;
rpm_belakang_kanan=rpm_belakang_kanan+0.3; value=0;} if(value==5)
{rpm_depan_kanan=rpm_depan_kanan+0.3; rpm_belakang_kanan=rpm_belakang_kanan+0.3; rpm_depan_kiri=rpm_depan_kiri+0.3;
rpm_belakang_kiri=rpm_belakang_kiri+0.3; value=0;} if(value==6)
{rpm_depan_kanan=rpm_depan_kanan-0.3; rpm_belakang_kanan=rpm_belakang_kanan-0.3;
rpm_depan_kiri=rpm_depan_kiri-0.3; rpm_belakang_kiri=rpm_belakang_kiri-0.3; value=0;}
if(value==7){rpm_depan_kiri=rpm_depan_kiri+0.3; value=0;}
if(value==8 && rpm_depan_kiri!=0){rpm_depan_kiri=rpm_depan_kiri-0.3; value=0;}
if(value==9){rpm_belakang_kiri=rpm_belakang_kiri+0.3; value=0;} if(value==10 &&
rpm_belakang_kiri!=0){rpm_belakang_kiri=rpm_belakang_kiri-0.3; value=0;} if(value==11){rpm_depan_kanan=rpm_depan_kanan+0.3; value=0;}
if(value==12 &&
rpm_depan_kanan!=0){rpm_depan_kanan=rpm_depan_kanan-0.3; value=0;} if(value==13){rpm_belakang_kanan=rpm_belakang_kanan+0.3; value=0;} if(value==14 &&
rpm_belakang_kanan!=0){rpm_belakang_kanan=rpm_belakang_kanan-0.3; value=0;}
if(value==15){rpm_depan_kanan=0; rpm_belakang_kanan=0; rpm_depan_kiri=0; rpm_belakang_kiri=0; value=0;}
esc_depan_kanan.write(rpm_depan_kanan); esc_belakang_kiri.write(rpm_belakang_kiri); esc_belakang_kanan.write(rpm_belakang_kanan); esc_depan_kiri.write(rpm_depan_kiri);
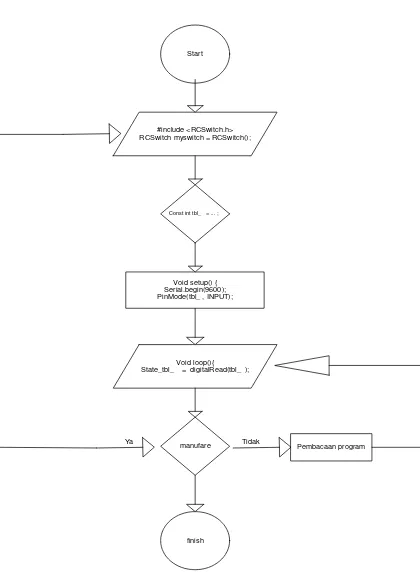
Start
#include <RCSwitch.h> RCSwitch myswitch = RCSwitch();
Const int tbl_ = ... ;
Void setup() { Serial.begin(9600); PinMode(tbl_ , INPUT);
Void loop(){
State_tbl_ = digitalRead(tbl_ );
manufare
finish
Pembacaan program Ya Tidak
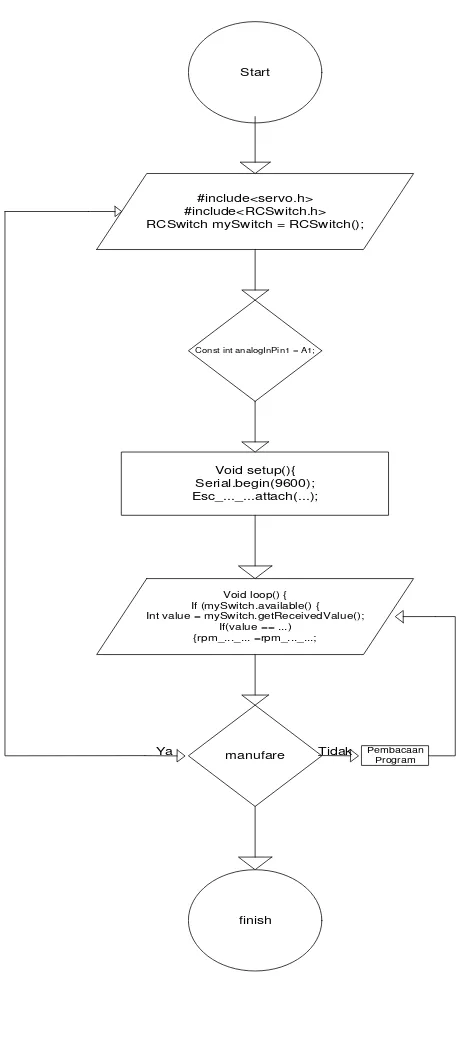
Start
#include<servo.h> #include<RCSwitch.h> RCSwitch mySwitch = RCSwitch();
Const int analogInPin1 = A1;
Void setup(){ Serial.begin(9600); Esc_..._...attach(...);
Void loop() { If (mySwitch.available() { Int value = mySwitch.getReceivedValue();
If(value == ...) {rpm_..._... =rpm_..._...;
manufare
finish
Pembacaan Program
Ya Tidak