vi
ABSTRAK ... Error! Bookmark not defined. ABTRACT...v
DAFTAR ISI ... i
DAFTAR TABEL... Error! Bookmark not defined. DAFTAR GAMBAR ... Error! Bookmark not defined. DAFTAR LAMPIRAN...xi
BAB I PENDAHULUAN ... Error! Bookmark not defined. 1.1 Latar Belakang ... Error! Bookmark not defined. 1.2 Maksud dan Tujuan ... Error! Bookmark not defined. 1.3 Rumusan Masalah ... Error! Bookmark not defined. 1.4 Batasan Masalah ... Error! Bookmark not defined. 1.5 Metode Penelitian ... Error! Bookmark not defined. 1.6 Sistematika Penulisan ... Error! Bookmark not defined. BAB II TEORI PENUNJANG ... Error! Bookmark not defined. 2.1 Teori Tentang Tanah... Error! Bookmark not defined. 2.2 Pengaruh Kemiringan Sudut Terhadap KecepatanError! Bookmark not defined. 2.3 Persamaan Linear...10 2.4 Perangkat Keras ... Error! Bookmark not defined.
2.4.1 Catu Daya ... Error! Bookmark not defined. 2.4.2 Arduino ... Error! Bookmark not defined. 2.4.3
Sensor...E rror! Bookmark not defined.
vii
3.2 Perancangan Algoritma ... Error! Bookmark not defined. BAB IV PENGUJIAN DAN ANALISA ... Error! Bookmark not defined. 4.1 Pengujian Perangkat Keras ... Error! Bookmark not defined. 4.1.1 Pengujian Modul RTC ... Error! Bookmark not defined. 4.1.2 Pengujian Modul SD Card ... Error! Bookmark not defined. 4.1.3 Pengujian Modul LCD ... Error! Bookmark not defined. 4.1.4 Pengujian Modul Wireless ... Error! Bookmark not defined. 4.1.5 Pengujian Modul Potensiometer ... Error! Bookmark not defined. 4.2 Analisa ... Error! Bookmark not defined. 4.3 Pengujian Perangkat Lunak ... Error! Bookmark not defined. BAB V KESIMPULAN DAN SARAN ... Error! Bookmark not defined. 5.1 Kesimpulan ... Error! Bookmark not defined. 5.2
Saran...Er ror! Bookmark not defined.
TUGAS AKHIR
Disusun Untuk Memenuhi Syarat Kelulusan Pada
Program Studi Strata Satu Sistem Komputer Di Jurusan Teknik Komputer
Oleh
Eko Aprianto
10209004
Pembimbing
John Adler ,M.Si
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
v
Segala puji bagi Allah SWT, Pencipta dan Pemelihara alam semesta, shalawat serta salam semoga terlimpah bagi Muhammad SAW, beserta keluarga dan para pengikutnya yang setia hingga akhir masa.
Atas rahmat Allah SWT, ahirnya penulis dapat menyelesaikan Tugas Akhir ini, meskipun proses belajar sesungguhnya tak akan pernah berhenti. Tugas akhir ini sesungguhnya bukanlah sebuah kerja individual dan akan sulit terlaksana tanpa batuan banyak pihak yang tak mungkin Penulis sebutkan satu persatu, namun dengan segala kerendahan hati, Penulis mengucapkan terima kasih kepada
1. Kedua orang tua dan keluarga yang telah memberikan motivasi dan doa untuk kelancaran pembuatan Tugas Akhir ini.
2. Bapak Dr.Wendi Zarman,M.Si selaku Ketua Jurusan Teknik Komputer.
3. Bapak Yeffry Handoko, selaku wali kelas 09 TK 01 jurusan teknik komputer yang banyak memberikan masukan saat berkuliah di Universitas ini.
4. Bapak John Adler,M.Si selaku pembimbing yang selalu memberikan masukan dalam penyelesaian Tugas Akhir ini.
5. Bapak dan ibu staff dosen jurusan teknik kompoter yang telah mengajarkan penulis ilmu yang bermanfaat.
6. Teman - teman 09 Tekom 01 yang selalu memeberikan semangat dalam menyelesaikan Tugas Akhir ini
Akhirnya, Penulis berharap semoga penelitian ini menjadi sumbangsih yang bermanfaat bagi dunia sains dan teknologi di Indonesia, khususnya disiplin keilmuan yang Penulis dalami.
Bandung,20 Agustus 2014
33
[1]. Amundsen, R.(2004).History of Soil Science: HansJenny Encyclopedia of Soils in the Environment. University of California. Berkeley,USA. [2].
http://www.esdm.go.id/batubara/doc_download/489-pengenalan-gerakan-tanah.html. Diakses pada tanggal 17 Juni 2013
[3] Suwarsono,J,(2009).Fisika untuk SMA/MA kelas X . Jakarta :Pusat Perbukuan Departemen Pendidikan Nasional.
[4]. http://arduino.cc/en/Tutoria /HomePage diakses dari tanggal 16 maret 2014 sampai 21 juni 2014.
[5]. Margolis,M,(2012).Arduino cookbook, second edition. O’Reilly Media Inc, USA.
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Pembangunan perumahan untuk memenuhi kebutuhan akan tempat tinggal mengakibatkan pembukaan lahan baru pada bidang miring juga bertambah. Pada daerah tersebut hampir setiap lahan yang masih tersedia dimanfaatkan untuk membangun tempat tinggal. Pembangunan tempat tinggal tersebut seringakali tanpa melihat sturktur kondisi tanah.Padahal indikasi adanya pergeseran tanah yang merupakan faktor terjadinya tanah longsor disebabkan struktur kondisi tanah yang kurang baik. Di Jawa Barat banyak daerah dataran tinggi yang berpotensi mengalami pergeseran tanah. Daerah tersebut adalah rawan tanah longsor. Dari situs m.berita8.com, Selasa (26/3/2013) menurut kepala PVMBG Bapak Surono.
"Catatan kami sejak awal tahun sampai sekarang sudah ada 18 kejadian longsor di Jabar. Di daerah lain masih di bawah 10 kejadian". Hal ini membuktikan bahwa Bencana tanah longsor di Jabar cukup sering terjadi, apabila tidak dilakukan pencegahanbencana tanaah longsor dapat mengakibatkan kerugian materi bahkan ada korban jiwa.
akhirnya tertarik untuk membuat suatu alat yang dapat mengenali adanya indikasi terjadinya tanah longsor.
1.2 Maksud dan Tujuan
Maksud dari pembuatan alat ini adalah membuat sistem data akusisi yaitu mengambil data, menyimpan data, dan mengolah data untuk mendeteksi adanya indikasi terjadinya tanah longsor.
Adapun tujuan yang hendak dicapai adalah :
a. Dapat memonitoring pergerakan tanah secara continuedan real time.
b. Dapat melakukan komunikasi secara wireless dalam pengiriman hasil monitoring.
1.3 Rumusan Masalah
Masalah yang akan ditemukan dalam pengujian meliputi :
1. Bagaimana alat ini dapat memonitoring pergerakan tanah secara continue. 2. Bagaimana cara mengidentifikasi kemungkinan adanya bencana tanah
longsor.
3. Bagaimana alat ini bisa mengambil data secara real time.
1.4 Batasan Masalah
Masalah yang akan dikaji dan dibahas meliputi :
1. Mikrokontroler yang digunakan sebagai pengontrol kerja alat adalah Arduino Pro Mini.
2. Visual Basic sebagai interfacedan Microsoft Access sebagai database. 3. Sampel uji adalah tanah berwarna merah dan pasir.
5. Pengujian alat dilakukan dengan cara simulasi dengan sudut kemiringan 15°, 30°, 45°, 60°.
6. Data hasil percobaan tersimpan pada MMC/SD berupa format .xls.
1.5 Metode Penelitian
Perancangan dalam pembuatan tugas akhir ini dilakukan beberapa tahap, yaitu :
1. Studi literature
Mengumpulkan bahan yang akan dijadikan tugas akhir dari buku-buku teks, internet, diskusi dengan dosen yang ahli dibidangnya, serta diskusi dengan teman.
2. Interview dan eksperimen
Mencoba berbagai modul yang telah dipersiapkan dari hasil studi literatur serta mendiskusikan hasil eksperimen dengan dosen pembimbing dan pakar lain.
3. Perancangan alat, baik secara hardware maupun software
Menggabungkan hasil eksperimen modul yang telah dilakukan, kemudian dilakukan pembuatan program untuk Arduino dengan software Arduino Ide dan membuat sistem interface pada PC.
4. Pengujian alat secararealtime dan simulasi
Melakukan simulasi untuk pembuktian cara kerja alat sesuai dengan batasan masalah.
5. Analisis data yang didapat dari hasil pengujian alat
Melakukan analisa dari data yang telah diperoleh saat pengujian. 6. Pembuatan laporan dan kesimpulan
1.6 Sistematika Penulisan
Adapun sistematika penulisan pada tugas akhir ini adalah sebagai berikut :
BAB I. PENDAHULUAN
Dalam bab ini membahas tentang latar belakang, maksud dan tujuan penulisan, rumusan masalah, batasan masalah,metode penelitian dan sistematika penulisan.
BAB II. LANDASAN TEORI
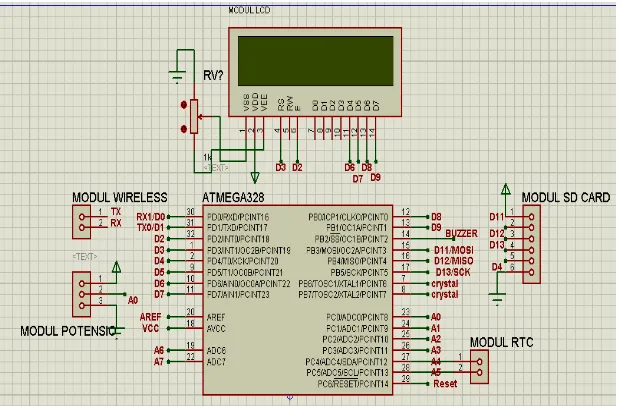
Dalam bab ini membahas tentang teori tanah, teori kecepatan pada bidang miring, teori persamaan linear dan teori yang berhubungan dengan Hardwarediantaranya modul Arduino Pro Mini, RTC, modul Potensiometer, modul SD Card, modul LCD, modul wireless dan buzzer. Software yang digunakan untuk membuat alat ini yaitu Arduino Ide dan Visual Basic 6.0.
BAB III. PERANCANGAN SISTEM
Dalam bab ini menjelaskan perancangan sistem yang dibuat. Diantaranya perancangan Hardware berupa rangkaian modul Arduino Pro mini, modul RTC, modul Sd card, modul Potensiometer, dan modul wireless. Software untuk interface menggunakan Visual Basic 6 dan untuk database menggunakan Microsoft Access.
BAB IV . HASIL PENGUJIAN DAN ANALISA
Dalam bab ini membahas tentang pengujian alat berupa tabel pengujian dan databasepada Microsoft Access. Analisa data dari tabel hasil pengujian.
BAB V. KESIMPULAN DAN SARAN
5
Dalam bab ini dijelaskan mengenai teori penunjang untuk membuat sebuah modul data logger untuk memonitoring pergeseran pergerakan tanah. Teori penunjang berupa teori tentang jenis tanah, mencari kecepatan pada bidang miring, perangkat keras yang digunakan dan perangkat lunak yang digunakan.
2.1 Teori Tentang Tanah
Tanah didefinisikan sebagai lapisan permukaan bumi yang berasal dari bebatuan yang telah mengalami serangkaian pelapukan oleh gaya-gaya alam, sehingga membentuk regolit yaitu lapisan partikel halus. Gaya – gaya alam tersebut terdiri dari gaya endogen (dari dalam)dan gaya eksogen (dari luar). Selain definisi tersebut para ahli geologi juga memliki definisi lain diantaranya :
Tanah terbentuk dari bahan induk yang telah mengalami modifikasi atau pelapukan akibat dinamika faktor iklim, organisme (termasuk manusia), dan relief permukaan bumi (topografi) seiring dengan berjalannya waktu. Berdasarkan dinamika kelima faktor tersebut terbentuklah berbagai jenis tanah dan dapat dilakukan klasifikasi tanah. (Hans Jenny ,1899-1992).[1]
2.1.1 Pengertian Tanah Longsor
2.1.1.1 Jenis Tanah Longsor
Ada enam jenis tanah longsor, yakni: longsoran translasi, longsoran rotasi, pergerakan blok, runtuhan batu, rayapan tanah, dan aliran bahan rombakan. Jenis longsoran translasi dan rotasi paling banyak terjadi di Indonesia. Sedangkan longsoran yang paling banyak memakan korban adalah aliran bahan rombakan. Beberapa contoh jenis tanah longsor:
a) Longsoran translasi
Longsoran translasi adalah bergeraknya massa tanah dan batuan pada bidang gelincir berbentuk rata atau menggelombang landai.
b) Longsoran rotasi
Gambar 2.2 Longsoran rotasi
Longsoran rotasi adalah bergeraknya massa tanah dan batuan pada bidang gelincir berbentuk cekung.
c) Pergerakan blok
Gambar 2.3 Pergerakan blok
Pergerakan blok adalah perpindahan batuan yang bergerak pada bidang gelincir berbentuk rata. Longsoran ini disebut juga longsoran translasi blok batu.
d) Runtuhan batu
Gambar 2.4 Runtuhan batu
Runtuhan batu terjadi ketika sejumlah besar batuan atau material lain bergerak ke bawah dengan cara jatuh bebas. Umumnya terjadi pada lereng yang terjal hingga menggantung terutama di daerah pantai. Batu-batu besar yang jatuh dapat menyebabkan kerusakan yang parah.
e) Rayapan tanah
Rayapan tanah adalah jenis tanah longsor yang bergerak lambat. Jenis tanahnya berupa butiran kasar dan halus. Jenis tanah longsor ini hampir tidak dapat dikenali. Setelah waktu yang cukup lama longsor jenis rayapan ini bisa menyebabkan tiang-tiang telepon, pohon, atau rumah miring ke bawah.
f) Aliran bahan rombakan
Gambar 2.6 Aliran bahan rombakan
Jenis tanah longsor ini terjadi ketika massa tanah bergerak didorong oleh air. Kecepatan aliran tergantung pada kemiringan lereng, volume dan tekanan air, dan jenis materialnya. Gerakannya terjadi disepanjang lembah dan mampu mencapai ratusan meter jauhnya. Di beberapa tempat bisa sampai ribuan meter seperti di daerah aliran sungai disekitar gunung api. Aliran tanah ini dapat menelan korban cukup banyak.
Umumnya tanah longsor memiliki beberapa gejala diantaranya munculnya retakan pada permukaan tanah. Retakan ini biasanya muncul setelah hujan, kemudian membentuk mata air baru secara tiba – tiba, kemudian adanya kerikil yang berjatuhan dari tebing. Dalam tugas akhir ini pengujian yang dilakukan adalah jenis tanah longsor aliran bahan rombakan. Jenis tanah yang diuji yaitu jenis tanah berwarna merah dan pasir. Kemiringan sudut yang diuji yaitu pada sudut 15°, 30°, 45°, dan 60°.
2.2 Pengaruh Kemiringan Sudut Terhadap Kecepatan
gerak menjelaskan bahwa setiap benda yang bergerak dipengaruhi oleh gaya yang bekerja pada bidang tersebut.
Bunyi hukum Newton II : “Percepatan yang ditimbulkan oleh gaya yang bekerja
pada benda berbanding lurus dengan gayanya dan berbanding terbalik dengan
massa benda”.[3]
Secara umum persamaan dari Hukum Newton II dapat ditulis menjadi :
∑ F = m.a...(2.1) Dimana : F= gaya (N)
m = massa (kg) a = percepatan(m/ 2)
F merupakan besarnya gaya yang dialami oleh objek, m merupakan massa dan a adalah percepatan. Karena pada percobaan ini terdapat sudut yang dapat mempengaruhi kecepatan maka rumus tersebut diturunkan kembali
ω. sin θ = m.a...(2.2) ω adalah gaya berat pada objek, karena benda yang bergerak pada sumbu x
maka sudutnya sin θ. Karena ω = m.g rumus tersebut dapat ditulis menjadi
m.g. sin θ = m .a...(2.3)
m adalah massa (kg) dan g adalah gravitasi bumi (g = 9,8 m/ 2) karena massa pada persamaan diatas memliki nilai yang sama sehingga kita bisa merubahnya menjadi g.sin θ = a, sehingga kita memperoleh bahwa salah satu faktor yang berpengaruh pada percepatan adalah sudut. Pada tugas akhir ini gaya gesek diabaikan, karena pada pengujian jalur pergeseran memiliki permukaan yang licin. Pengujian sampel dilakukan dengan keadaan awal diam, sehingga kecepatan awal (Vo) adalah nol. Untuk mencari kecepatan maka percepatana pada rumus diatas harus diturunkan dengan rumus intergral
V= �0 + �� V=0 + a.(t)
maka persamaan 2.3 dapat diturunkan kembali menjadi
m.g. sin θ = m .�...(2.5) v = 9,8. sin θ.t...(2.6) Persamaan 2.6 merupakan hasil penurunan dari persamaan 2.1. Persamaan 2.6 merupakan persamaan untuk mencari kecepatan pada bidang miring.
2.3 Persamaan Linear
Persamaan linear merupakan sebuah persamaan aljabar dimana tiap sukunya mengandung konstanta atau perkalian konstanta dengan tanda sama dengan serta variabelnya berpangkat satu. Persamaan ini dikatakan linear karena jika kita gambarkan dalam koordinat cartesius berbentuk garis lurus. Sistem persamaan linear disebut sistem persamaan linear satu variabel karena dalam sistem tersebut mempunyai satu variabel. Bentuk umum untuk persamaan linear satu variabel yaitu
y = mx + c...2.7 Dalam persamaan 2.7 konstanta m menggambarkan gradien garis serta konstanta c adalah titik potong garis dengan sumbu-y. Secara umum persamaan linear digambarkan dengan sebuah persamaan garis.
2.4 Perangkat Keras
Perangkat keras adalah suatu perangkat yang dapat membantu mempermudah dalam membuat suatu alat. Perangkat keras berupa perangkat berbentuk fisik. Perangkat keras yang digunakan pada pembuatan alat diantaranya catu daya, arduino, sensor, modul wireless.
2.4.1 Catu Daya
Catu daya merupakan bagian dari setiap perangkat elektronika yang berperan sebagai sumber pemberi tenaga atau daya. Catu daya adaptor adalah
Arduino adalah platform pembuatan prototipe elektronik yang bersifat
open-source hardware yang berdasarkan pada perangkat keras dan perangkat lunak yang
fleksibel dan mudah digunakan.Arduino pada awalnya dikembangkan di Ivrea,
Arduino berfungsi sebagai pengatur kontrol alat. Arduino menjalankan perintah sesuai program yang diberikan dan memproses banyak data dari inputan sensor.
Gambar 2.9 Gambaran blok pada Arduino
Gambar 2.9 merupakan gambaran blok yang ada pada Arduino. Terdiri dari blok memori, blok komunikasi, blok I/O dan blok prossesor.
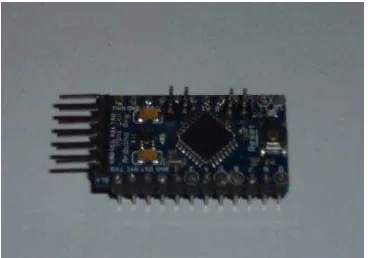
2.4.2.1 Arduino Pro Mini
Arduino Pro Mini ini berbasis mikrokontroler atmega 168/328. Arduino Pro Mini memiliki fasilitas – fasilitas pendukung yang membuatnya menjadi board mikrokontroler yang sering digunakan dalam berbagai aplikasi. Fasilitas – fasilitas yang dimiliki oleh Arduino Pro Mini adalah :
1. Saluran I/O 22 buah, 14 digital dan 8 analog. 2. ADC 10 bit sebanyak 8 saluran.
3.Memiliki internal SRAM 2K byte. 4. Port UART untuk komunikasi serial. 5. 32Kbyte RAM flash memory.
2.4.2.2 Perangkat I/O
Perangkat masukandan keluaran atau sering dikenal I/O mikrokontroler adalah suatu perangkat yang menghubungkan mikrokontroler dengan dunia luar (rangkaian lain), perangkat ini dibutuhkan sebagai media komunikasi dengan perangkat lain atau perubah tipe sinyal. Beberapa perangkat I/O yang dimiliki ATmega328 antara lain:
1. UART (Universal Asynchronous Receiver Transmitter) digunakan sebagai komunikasi serial.
2. SPI (Serial Peripheral Interface) merupakan port komunikasi serial sinkron.
3. 12C bus (Intergrated Circuit bus) merupakan antamuka serial bus yang dikembangkan oleh philips.
4. Analog to Digital Conversion (ADC) adalah rangkaian yang digunakan untuk mengubah data analog ke data digital.
2.4.2.3 Konfigurasi Pin Arduiono Pro Mini
Gambar 2.10Konfigurasi pin arduino pro mini Keterangan pin pada arduino pro mini :
b. Pin A0 sampai A7 merupakan Pin Analog. Pin - pin ini membaca inputan berupa data analog. Data analog yang dapat dibaca oleh pin tersebut antara 0 sampai 1023. Nilai 0 sampai 1023 tersebut mewakili tegangan 0 sampai 5 volt.
c. VREF merupakan pin tegangan referensi pada Arduino. d. VCC merupakan pin untuk tegangan yang masuk.
e. Crystal merupakan pin untuk mengatur kecepatan kerja alat. f. Reset merupakan pin untuk memulai program dari awal.
2.4.3 Sensor
Gambar 2.11 Potensiometer multiturn
2.4.3.2 Real Time Clock (RTC)
Real Time Clock (RTC) merupakan suatu chip (IC) yang memiliki fungsi sebagai kalender dan jam elektronik dimana perhitungan hari, tanggal, bulan, tahun, jam, menit dan detik tersimpan di memori dengan alamat-alamat tertentu. Sistem perhitungan jam dan kalender pada RTC berjalan secara otomatis dan continue walaupun power supply dimatikan.
Pada pemakaiannya, RTC biasa dihubungkan ke mikrokontroler atau mikroprosesor, dimana mikrokontroler atau mikroprosesor tersebut hanya perlu melakukan setting mode RTC, setting waktu maupun pembacaan waktu saja.Untuk mendapatkan informasi waktu yang sesuai dengan keadaan waktu sebenarnya penulis menggunakan IC DS1307.
Gambar 2.12 Real time clock
2.4.4 Modul SD Card
kecil. Modul SD card dapat digunakan dalam dunia elektronik yaitu untuk penyimpanan data. Dalam membuat data logger SD card merupakan perangkat yang wajib digunakan. Komunikasi yang digunakan cukup mudah karena sudah menggunakan komunikasi yang bisa langsung pada mikrokontroler.
Gambar 2.13 Modul SD card
SD – card memiliki beberapa format file system diantaranya adalah :
NTFS
FAT
FAT 32 (default)
Ex FAT
Dari beberapa format file system yang dimiliki oleh memory card penulis menggunakan format standart yang digunakan yaitu FAT 32.
2.4.5 Modul Wireless
Gambar 2.14 Modul wireless si4463
Modul wireless ini bekerja pada supply 3,5 - 5,5 volt. Penggunaannya juga sangat mudah. Terdiri dari 5 pin yaitu Rx, Tx, Vcc, Gnd, Reset. Untuk menggunakannya kita hanya harus menghubungkan modul ini ke bootloader. Pin yang digunakan hanya pin Rx dan Tx. Vcc untuk supply 5 volt dan Gnd untuk - 5 volt.
2.5 Perangkat Lunak
Perangkat lunak adalah suatu perangkat yang digunakan untuk mempermudah pembuatan program atau algoritma kerja suatu alat. Perangkat lunak ini sebuah perangkat yang berbentuk non fisik. Dalam pembuatan alat ini ada beberapa perangkat lunak yang digunakan diantaranya Arduino Ide, Visual Basic, dan Microsoft Access.
2.5.1 Arduino Ide
Arduino Ide adalah perangkat lunak yang bisa digunakan untuk pemograman mikrokontroler. Perangkat lunak ini berupa algoritma kerja dari suatu alat yang berbentuk listing program yang ditanamkan ke dalam mikrokontroler.
program dari kode bahasa C (dengan GNU GCC) sedangkan Arduino Software (Arduino IDE) menghasilkan file hex dari baris kode yang dinamakan sketch.
Gambar 2.15 Arduino Ide
Intruksi pada perangkat lunak Arduino Ide relatif cukup banyak dan mudah digunakan. Sketch yang dibuat di Arduino Software di-compile dengan perintah verify.Verify bertujuan untuk memeriksa apakah sketch yang telah kita buat terdapat kesalahan atau tidak.
Tabel 2.1 Intruksi dasar pada Arduino Ide
Intruksi Keterangan Serial.Begin() Set baudrate
Delay() Tunggu dalam satuan ms Serial.Print() Mengirim data serial If... then Percabangan
Arduino Ide dapat digunakan pada operasi Windows pada komputer dengan sistem minimum sekalipun tanpa harus membutuhkan spesifikasi komputer yang canggih.
Gambar 2.16 Lembar kerja arduino ide
Gambar 2.16 merupakan tampilan awal dari arduino ide yang berjalan pada operasi sistem windows. Source code yang telah dibuat kemudian diubah oleh compiler menjadi bahasa mesin yang dimengerti oleh mikrokontroler. Bahasa mesin tersebut terdapat pada file dengan bentuk format .cpp. hex yang kemudian program tersebut dikirim ke dalam board Arduino langsung dengan perintah Upload.
2.5.2 Visual Basic 6.0
Gambar 2.17 Visual basic 6.0
Bahasa pemrograman Visual Basic tidaklah hanya identik dengan Visual Basic saja. Sistem Pemrograman Visual Basic dalam bentuk edisi aplikasi telah dimasukkan ke dalam Microsoft Excel, Microsoft Access, dan banyak aplikasi Windows lainnya juga menggunakan bahasa yang sama. Visual Basic Scripting Edition (VBScript) adalah sebuah bahasa script yang digunakan secara lebih umum dan merupakan bagian dari bahasa Visual Basic.
Gambar 2.18 Tampilan awal visual basic 6.0
dengan Microsoft Access 2007. Gambar 2.19 adalah tampilan jendela kerja pada Visual Basic 6.0.
Gambar 2.19 Jendela kerja Visual Basic 6.0
Gambar 2.20 adalah tampilan jendela kerja coding. Tampilan kerja pada Visual Basic, pada jendela kerja adalah untuk membuat form tampilan.
Gambar 2.20 Tampilan jendela coding pada Visual Basic 6.0
22 3.1 Perancangan Perangkat Keras
Pada bab ini menjelaskan perangkat keras yang digunakan dalam membuat tugas akhir ini. Perangkat keras yang digunakan terdiri dari modul Arduino Pro Mini, modul RTC, modul Potensiometer, modul wireless, modul SD card.
3.1.1 Blok Diagram Sistem
Pada tugas akhir ini, terdapat beberapa diagram blok yang dirancang. Berikut diagram blok secara keseluruhan :
Gambar 3.1 Diagram blok sistem keseluruhan Pada blok diagram tersebut, terdapat tiga blok utama, yaitu: 1. input
2. prosses 3. output
komponen yang digunakan untuk mendapatkan data dari perubahan posisi tanah, sebenarnya potensiometer ini bukan merupakan sebuah sensor akan tetapi kepekaannya terhadap perubahan posisi membuatnya dapat digunakan untuk mendapatkan data dari perubahan posisi yang terjadi. Modul RTCdigunakan untuk mendapatkan data berupa waktu, modul ini merupakan real time clock lengkap berupa informasi waktu. Pada sensor potensiometer output yang dihasilkan berupa data analog, oleh karena itu sensor tersebut akan dimasukan ke pin ADC yang terdapat pada Arduino agar data dapat dikonversi menjadi sinyal digital. Data dari module RTC akan dikirim melalui komunikasi paralel (SCL dan SDA).Pada output terdapat LCD sebagai media untuk melihat informasi yang telah diolah oleh Arduino.Modul SD Card merupakan media penyimpanan informasi. Buzzer digunakan untuk tanda apabila hasil dari informasi nilai ADC sudah melebihi batas yang telah ditentukan. Selain itu data yang telah didapat, dikirim melalui modul wireless. Pada modul wireless penerima data akan diolah kembali dengan menggunakan personal computer (PC).
3.1.2 Modul RTC Data Logger
Modul RTC Data Logger merupakan sebuah alat yang ditempatkan diluar ruangan untuk memonitoring sebuah pergerakan tanah. Modul RTC Data Logger ini merupakan kumpulan dari beberapa komponen elektronika yaitu Arduino, Modul SD card, Modul wireless, modul Potensiometer, modul RTC, dan buzzer. Modul ini akan memproses data dari hasil keluaran sensor potensiometer dan RTC. Gambar 3.2 merupakan gambar Modul RTC Data Logger.
3.1.2.1 Arduino Pro Mini
Pada bagian prosses pengolahan data, data diolah menggunakan Arduino Pro Mini. Arduino Pro Mini adalah board yang berisi mikrokontroler Atmega238. Arduino Pro Mini ini mempunyai fitur seperti ADC, timer, dan komunikasi serial. Bahasa pemogramannya menggunakan Arduino Ide. Arduino cukup mudah digunakan karena pemogramannya open source.
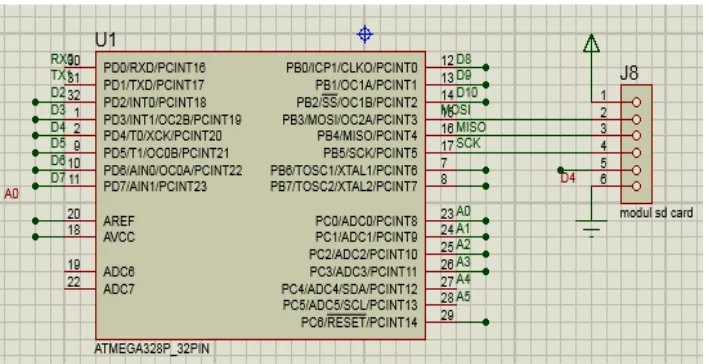
Gambar 3.3 Skema Arduino Pro Mini Data Logger Berikut konfigurasi port yang akan digunakan :
Tabel 3.1 Tabel Konfigurasi port Arduino Pro Mini
Nama Pin Fungsi Keterangan
D9,D8,D7,D6, D5, D3, D2
LCD 16x2 Menampilkan informasi
A4 SCL Komunikasi Modul RTC
A5 SDA Komunikasi Modul RTC
D10 Output Komunikasi buzzer
Rx RX (penerima) Komunikasi ke Modul Wireless
D11,D12,D13, D4
Output Komunikasi ke Modul SD Card
A0 Input sensor Sensor Potensiometer
Modul ini akan mengolah data yang didapat dari sensor potensiometer. Data yang didapat dari sensor tersebut akan diolah menjadi sebuah informasi. RTC Data Logger ini akan mengambil data secara terus menerus sesuai dengan waktu yang sebenarnya. Mikrokontroler akan mengatur semua kerja dari semua perangkat atau komponen yang digunakan. Gambar 3.4 adalah mikrokontroler Arduino Pro Mini yang digunakan dalam pembuatan alat ini.
Gambar 3.4 Arduino Pro Mini
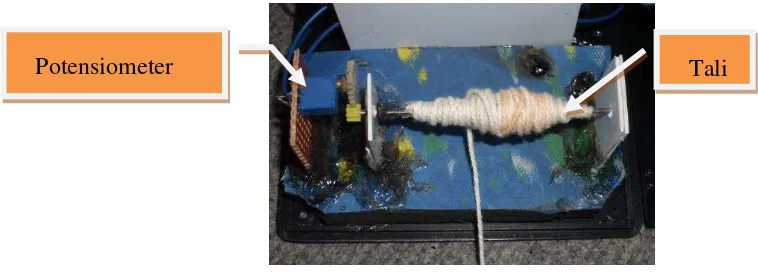
3.1.2.2 Rangkaian Sensor Potensiometer
pada potensio adalah 100K ohm, maka range resistansi akan dimulai dari tahanan 0 ohm sampai dengan 100K ohm.
Rangkain sensor potensiometer ini sangat sederhana dan praktis. Vout dari sensor ini dapat langsung dihubungkan ke mikrokontroler. Vout dari sensor potensiometer dijadikan masukan melalui pin Analog-to-Digital Converter pada modul Arduino Pro Mini. Pengolahan data dari sensor tersebut cukup mudah karena cukup dengan mengkonversi nilai ADC yang diambil.
Gambar 3.5 Skema Sensor Potensiometer
Gambar 3.6 Modul Sensor Potensiometer
Gambar 3.6 merupakan gambar rangkaian yang telah terpasang pada board PCB beserta seluruh komponennya.
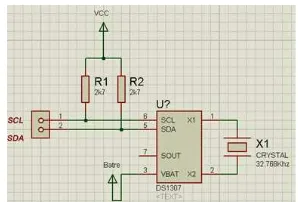
3.1.2.3 Rangkaian Modul RTC
Modul RTC (real time clock) adalah modul atau perangkat yang berfungsi sebagai pewaktu. Modul ini menampilkan informasi berupa waktu. Informasi tersebut cukup lengkap karena berisi tanggal, bulan, tahun, jam, menit, detik dan
hari. Modul RTC ini sangat dibutuhkan pada pembuatan Data Logger ini, karena Modul RTC ini digunakan sebagai media informasi mengenai waktu. Dengan adanya modul RTC ini data yang diambil sensor dapat diketahui berdasarkan waktu, penggunaan modul RTC ini sangat tepat digunakan dalam pembuatan sistem akusisi data atau monitoring. Modul ini dapat dihubungkan dengan mikrokontroler seperti Arduino ProMini menggunakan komunikasi i2c. Gambar 3.7 adalah gambar raangkaian dari modul RTC. Gambar 3.8 adalah gambar dari Modul RTC yang sudah terpasang pada PCB dan lengkap dengan komponen - komponennya.
Gambar 3.7 Rangkaian Modul RTC
Gambar 3.8 Modul RTC
3.1.2.4 Rangkaian Modul SD Card
Modul SD Card merupakan modul untuk mempermudah antarmuka antara mikrokontroler dengan SD card. Modul dapat digunakan sebagai media penyimpanan. Modul ini cocok untuk berbagai aplikasi yang membutuhkan media penyimpan data. Penggunaan modul SD card ini sangat dibutuhkan pada
Baterai
pembuatan data logger. Modul SD card berkomunikasi dengan mikrokontrler menggunakan jalur SPI yang telah tersedia pada mikrokontroler.
Gambar 3.9 Skema rangkain modul SD card
Gambar 3.9 adalah skema rangkaian antara modul SD card dengan mikrokontroler. Pin yang digunakan yaitu pin miso, mosi, sck, dan ss.
Gambar 3.10 Modul SD card
Gambar 3.10 adalah modul SD card yang digunakan pada pembuatan data logger ini. Modul ini bekerja pada tegangan 5 volt.
3.1.2.5 Modul Wireless
Modul wireless Si4463 merupakan modul transceiver ( tranmitter – receiver). Modul ini merupakan sebuah modul yang terdiri dari RF transmitter dan RF receiver dengan sistem interface serial UART .
Gambar 3.11Rangkaian modul wireless Transmitter
Gambar 3.11 adalah gambar rangkaian modul wireless Transmitter dengan mikrokontroler. Pin yang digunakan pin Rx dan Tx.
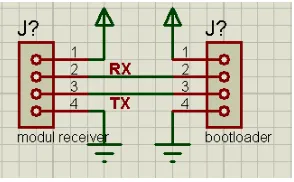
Gambar 3.12 Rangkaian modul wireless Receiver
Gambar 3.12 adalah gambar skematik modul wireless Receiver yang terhubung dengan bootloader. Pada receiver yang dibutuhkan yaitu pin Tx dan Rx.
Gambar 3.13 adalah gambar modul wireless Transmitter yang telah tersambung dengan kabel antena.
Gambar 3.14 Antena pemancar modul wirelss Transmitter
Gambar 3.14 adalah antena yang digunakan sebagai pemancar pada modul wireless Transmitter.
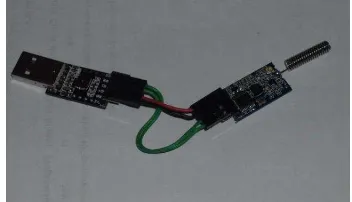
Gambar 3.15 Modul wireless Receiver
Gambar 3.15 merupakan gambar modul wireless Receiver yang terhubung dengan bootloader. Bootloader ini yang nantinya akan dihubungkan dengan PC.
3.2 Perancangan Algoritma
3.2.1 Algoritma Modul RTC Data Logger
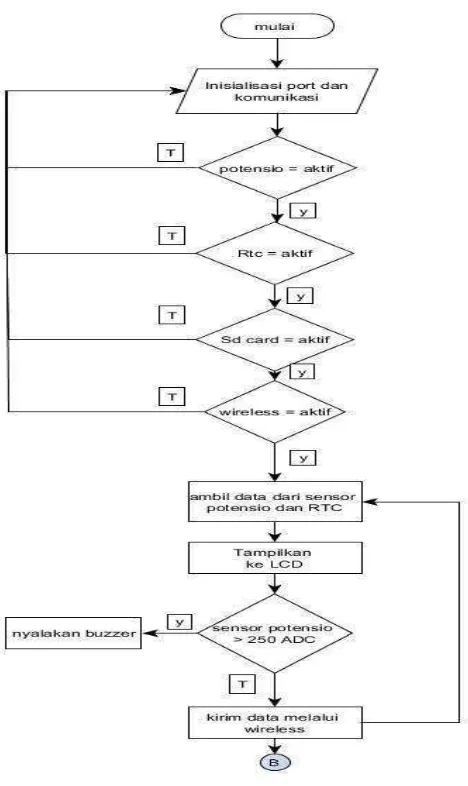
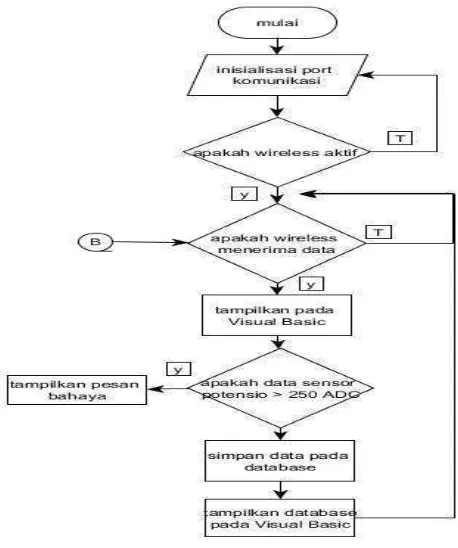
Gambar 3.16 Algoritma pengiriman modul data logger
maka secara otomatis mikrokontroler akan menyalakan buzzer. Program pengiriman yaitu mengirimkan hasil dari sensor potensiometer dan modul RTC. Semua data yang diambil akan ditampilkan melalui modul LCD dan data juga tersimpan pada modul SD card.
Pada gambar 3.17 menjelaskan perancangan algoritma penerimaan pada Visual Basic. Program ini merupakan penerimaan data dari modul RTC Data Logger. Data yang telah diterima dari Transmitter akan dibentuk menjadi sebuah record menggunakan Visual Basic. Visual Basic 6 akan menyimpan semua informasi yang diterma dari modul wireless. Semua data yang telah didapat akan disimpan kedalam sebuah database. Database tersebut dibuat menggunakan Microsoft Access. Pada Visual Basic informasi kemudian diseleksi berdasarkan keterangannya. Penyimpanan data pada Microsoft Access dibagi menjadi 4 bagian, yaitu : nomor, tanggal, waktu, dan nilai ADC. Database ini kemudian ditampilkan kembali pada Visual Basic 6.0 berupa data grid.
33
Pada bab ini akan dibahas secara keseluruhan mengenai pengujian alat diantaranya adalah pengujian dan analisis perangkat keras, serta pengujian dan analisis perangkat lunak dari hasil percobaan.
4.1 Pengujian Perangkat Keras
Pengujian semua perangkat keras yang digunakan pada pembuatan tugas akhir ini. Perangkat keras tersebut terdiridari modul RTC, modul potensiometer, modul SD card, modul wireless, modul LCD, dan modul Arduino Pro Mini.
4.1.1 Pengujian Modul RTC
Pada alat yang dibuat, modul RTC merupakan modul yang berfungsi sebagai penanda waktu. Fungsi dari modul RTC ini diperlukan untuk mendeteksi pergerakan dari sensor. Pada saat sensor mengalami perubahan, sensor RTC ini akan digunakan sebagai acuan dalam melihat seberapa cepat perkembangan pergeseran dari perubahan tersebut. Data dari modul RTC ini meliputi hari, tanggal, bulan, tahun, jam, menit, dan detik. Data dari modul RTC ini akan terus berjalan sesuai dengan waktu normal. Modul RTC ini membutuhkan 2 pin, yaitu pin data(SDA) dan pin clock(SCL) .
Gambar 4.1 Tampilan modul RTC pada LCD Keterangan pada gambar 4.1 sebagai berikut :
A. Tanggal, bulan, dan tahun. B. Jam, menit, detik.
C. Hari.
Tampilan pada modul LCD menunjukan bahwa modul RTC bekerja dengan baik. Informasi berupa waktu ditampilkan dengan lengkap mulai dari tanggal, bulan, tahun , hari , jam, menit, dan detik.
4.1.2 Pengujian Modul SD Card
Modul SD card merupakan modul yang berfungsi untuk penyimpanan data cadangan. Modul SD card ini akan menyimpan semua informasi yang telah didapatkan dari semua modul atau sensor yang terhubung pada alat pembuatan data logger ini. Data yang diambil dari semua modul akan disimpan dalam format xls. Format xls ini dapat dibuka melalui Microsoft Excel.
C A
Gambar 4.2 menunjukan bila SD card telah terinisialisasi pada Modul data logger. Jika Modul SD card telah terpasang pada Modul LCD menampilkan card initialized. Artinya modul SD card telah terinisialisasi.
Gambar 4.2 Tampilan pada LCD jika modul SD card telah terpasang
Gambar 4.3 Data dari modul SD card
sampai 1023. Gambar di atas membuktikan bahwa modul SD card dapat mendeteksi nilai ADC dari sensor potensiometer.
Pemilihan format xls bertujuan untuk mempermudah pengolahan data, data yang tersimpan pada SD card dapat diolah menjadi informasi. Salah satu yang bisa dilakukan adalah dengan membuat sebuah grafik.
Gambar 4.4 Pengolahan data dari SD card
Gambar 4.4 adalah contoh pengolahan data dengan membuat grafik perkembangan nilai ADC berdasarkan waktu.
4.1.3 Pengujian Modul LCD
Modul LCD merupakan output yang terdapat pada modul data logger ini. Modul LCD ini menampilkan informasi secara langsung dari semua modul atau sensor yang digunakan. Informasi dari modul modul tersbut langsung dikeluarkan melalui tampilan pada layar LCD. Gambar 4.5 hasil pengujian modul LCD.
4.1.4 Pengujian Modul Wireless
Modul wireless adalah modul komunikasi yang digunakan pada alat data logger ini. Fungsinya adalah untuk mengirimkan data yang telah diperoleh modul RTC data logger kepada user (receiver).
Pengujian pada modul wireless ini pertama dengan cara membandingkan data yang diterima oleh receiver dengna tampilan pada modul LCD. Tampilan pada modul LCD berisi informasi yang sama dengan data yang dikirim oleh transmitter pada receiver.
Gambar 4.6 Tampilan pada modul LCD
Gambar 4.6 adalah tampilan pada modul LCD dan merupakan informasi yang dikirimkan melalui modul wireless.
Pada gambar 4.6 dan gambar 4.7 terlihat bahwa data pada modul LCD sama dengan data yang diterima pada PC. Artinya modul wireless dapat bekerja dengan baik dalam pengiriman data.
4.1.5 Pengujian Modul Potensiometer
Modul potensiometer merupakan modul yang dirancang untuk mendeteksi pergerakan tanah. Potensio yang digunakan pada modul ini adalah potensiometer multitune. Potensiometer multiturn adalah potensio yang dapat berputar lebih dari 360 derajat.
Pengujian modul potensio dilakukan menggunakan tali yang dihubungkan dengan tiang penyangga. Tiang penyangga tersebut merupakan indikator untuk mengetahui pergeseran tanah. Saat tanah yang terdapat pada lintasan pergeseran tersebut bergeser, tanah tersebut akan menarik tiang penyangga. Lintasan pergeseran tanah juga tersebut akan dirubah sudut kemiringannya untuk mengetahui pengaruh kemiringan terhadap kecepatan pergeseran.
Cara kerja dari modul potensio ini adalah pada saat ada pergerakan tiang penyangga pada lintasan, maka tune dari potensio akan berputar. Perputaran pada tune potensio akan berpengaruh pada keluaran ADC pada sensor. Semakin jauh pergeseran tanah maka nilai ADC juga akan terus bertambah.
Gambar 4.8 Pengujian modul potensio dari tengah Modul
data logger
Gambar 4.8 gambar pengujian modul potensiometer dari samping. Pada gambar terlihat posisi modul RTC data logger dan catu daya.
Gambar 4.9 Pengujian modul potensio dari tengah depan
Gambar 4.9 adalah tampilan pengujian modul dari tengah depan. Terlihat bahwa modul RTC data logger terhubung pada tiang penyangga. Posisi awal tiang penyangga berada pada lintasan pergeseran dan pasir sebagai media pengujian.
Gambar 4.10 Nilai ADC saat posisi awal tiang penyangga
Gambar 4.10 merupakan nilai awal ADC saat tiang penyangga berada pada posisi awal. Pengambilan data diatasdilakukan dengan cara mencabut penahan yang terdapat pada lintasan. Penahanbertujuan untuk memberikan posisi
Tali
Tiang penyangga
Jalur pergeseran
Posisi awal
awal pada tiang penyangga. Saat penahan dicabut maka posisi dari tiang penyangga akan bergerak menuju dasar lintasan. Perubahan posisi tersebut akan memutar sensor potensio dan secara otomatis nilai dari sensor akan berubah sesuai perubahan posisi tersebut.
Gambar 4.11 Posisi akhir tiang penyangga pada saat percobaan Gambar 4.11 merupakan posisi akhir dari tiang penyangga. Dari posisi awal sampai posisi akhir ± 55 cm.
Gambar 4.12 Nilai ADC saat tiang penyangga berada di posisi akhir Gambar 4.12 adalah nilai akhir saat tiang penyangga berada pada posisi akhir jalur pergeseran.
Berikut adalah beberapa tabel dan grafik hasil pengujian alat.Saat pengujian lintasan pergeseran tanah akan dirubah sudutnya mulai dari sudut 15°, 30°, 45°, dan 60°. Sampel uji yang digunakan adalah tanah berwarna merah dan
pasir dengan massa 500gram dan 1000gram tiap sampel uji. Tabel 4.1 adalah hasil pengujian pada objek tanah berwarna merah dan pasir dengan massa masing - masing 500gram. Tabel 4.2 adalah hasil pengujian pada objek tanah berwarna merah dan pasir dengan massa masing - masing 1000gram.
Tabel 4.1Hasil nilai ADC pada sampel uji 500gram
no
Tabel 4.2 Hasil nilai ADC pada objek 1000gram
Pada tabel 4.1 menunjukan hasil perolehan nilai ADC dari percobaan pada sampel uji pasir dan tanah merah dengan massa sampel uji 500gram. Dari hasil pengujian pada sampel uji 500gram nilai ADC memiliki range yang berbeda pada setiap sudutnya. Pada sudut 15° nilai ADC yang diperoleh adalah nol. Karena pada sudut 15° tidak ada pergerakan dari sampel uji. Pada sudut 30° rata - rata nilai ADC yang diperoleh pasir dan tanah berwarna merah adalah 327 dan 304. Pada sudut 45 ° adalah 263 dan 267. Pada sudut 60° adalah 223 dan 225.
Pada tabel 4.2 menunjukan hasil perolehan nilai ADC dari percobaan pada sampel uji pasir dan tanah merah dengan massa sampel uji 1000gram. Dari hasil pengujian pada sampel uji 1000gram nilai ADC memiliki range yang berbeda pada setiap sudutnya. Pada sudut 15° nilai ADC yang diperoleh adalah nol. Karena pada sudut 15° tidak ada pergerakan dari sampel uji. Pada sudut 30° rata - rata nilai ADC yang diperoleh pasir dan tanah berwarna merah adalah 297 dan 288. Pada sudut 45 ° adalah 252 dan 244. Pada sudut 60° adalah 178 dan 187.
Nilai - nilai ADC yang diperoleh adalah nilai hasil try and error. Nilai ADC ini adalah nilai yang akan menentukan apakah kondisi tanah berbahaya atau tidak. Batas nilai ADC yang ditentukan pada pengujian adalah 250, sehingga saat nilai ADC > dari 250 maka akan mengaktifkan buzzer sebagai tanda bahaya. Kemudian pada interface di Visual Basic juga akan tampil pesan peringatan bahwa kondisi tanah rawan tanah longsor.
Pengujian dilakukan dengan panjang lintasan ± 55cm. Dari hasil pengujian yang dilakukan dapat ditentukan juga jarak maksimal pergeseran yang dapat dijangkau oleh alat. Nilai rata - rata dari semua pengujian menghasilkan nilai 254 nilai ADC. Dengan rumus perbandingan
� �� =
� ��� ��� � ���
maka dapat dihitung berapa maksimal pergeseran. Dimana s adalah panjang lintasan dan S max adalah panjang maksimal. Sehingga diperoleh 55
� �� = 254
(a)
(b)
(c) (d)
Gambar 4.13 Grafik hasil pengujian pasir 500gram dan tanah berwarna merah 500gram (a) sudut 15° (b) sudut 30° (c) sudut 45° (d) sudut 60°
Gambar 4.13menunjukan grafik hasil pengujian pasir dan tanah berwarna merah dengan massa 500gram. Grafik dibuat berdasarkan tabel hasil pengujian pada lampiran A. Pada gambar 4.13 (a) sudut 15° pasir dan tanah berwarna merah tidak mengalami perubahan. Pada gambar 4.13 (b) , gambar 4.13 (c) dan gambar 4.13 (d) pasir dan tanah berwarna merah mengalami perubahan kecepatan.
Pada gambar 4.13 (b) sudut 30° range kecepatan pasir antara 6,42 m/s sampai 6,96 m/s. Dari 10 pecobaan kecepatan rata - rata yang diperoleh adalah
� � � − � � = �1 + �2 + �3 + ....+ � = 67,6
Pada Gambar 4.13 (b) sudut 30° range kecepatan tanah berwarna merah antara 6,42 m/s sampai 7,01 m/s. Dari 10 pecobaan kecepatan rata - rata yang diperoleh adalah
� � � − � �= �1 + �2 + �3 + ....+ � = 68,2
10 = 6,82 m/s.
Pada gambar 4.13 (c) sudut 45° range kecepatan pasir antara 7,55 m/s sampai 7,96 m/s. Dari 10 pecobaan kecepatan rata - rata yang diperoleh adalah
� � � − � �= �1 + �2 + �3 + ....+ � = 77,8
10 = 7,78 m/s.
Pada Gambar 4.13 (c) sudut 45° range kecepatan tanah berwarna merah antara 7,55 m/s sampai 7,96 m/s. Dari 10 pecobaan kecepatan rata - rata yang diperoleh adalah
� � � − � � = �1 + �2 + �3 + ....+ � = 77,3
10 = 7,73 m/s.
Pada gambar 4.13 (d) sudut 60° range kecepatan pasir antara 8,08 m/s sampai 8,34 m/s. Dari 10 pecobaan kecepatan rata - rata yang diperoleh adalah
� � � − � � = �1 + �2 + �3 + ....+ � = 82,2
10 = 8,22 m/s
(c) (d)
Gambar 4.14 Grafik hasil pengujian pasir dan tanah berwarna merah 1000gram (a) sudut 15°(b)sudut 30° (c) sudut 45° (d) sudut 60°
Gambar 4.14 menunjukan grafik hasil pengujian pasir dan tanah berwarna merah dengan massa 1000gram. Grafik dibuat berdasarkan tabel hasil pengujian pada lampiran A. Pada gambar 4.14 (a) sudut 15° pasir dan tanah berwarna merah tidak mengalami perubahan. Pada gambar 4.14 (b) , gambar 4.14 (c) dan gambar 4.14 (d) pasir dan tanah berwarna merah mengalami perubahan kecepatan.
Pada gambar 4.14 (b) sudut 30° range kecepatan diperoleh antara 3,48 m/s sampai 3,87 m/s. Dari 10 pecobaan kecepatan rata - rata yang diperoleh adalah
� � � − � �= �1 + �2 + �3 + ....+ � = 37,1
10 = 3,71 m/s.
Pada Gambar 4.14 (b) sudut 30° range kecepatan tanah berwarna merah antara 3,62 m/s sampai 3,82 m/s. Dari 10 pecobaan kecepatan rata - rata yang diperoleh adalah
� � � − � �= �1 + �2 + �3 + ....+ � = 37,6
10 = 3,76 m/s.
Pada gambar 4.14 (c) sudut 45° range kecepatan pasir antara 4,12 m/s sampai 4,60 m/s. Dari 10 pecobaan kecepatan rata - rata yang diperoleh adalah
� � � − � � = �1 + �2 + �3 + ....+ � = 43,1
Pada Gambar 4.14 (c) sudut 45° range kecepatan tanah berwarna merah antara 4,18 m/s sampai 4,53 m/s. Dari 10 pecobaan kecepatan rata - rata yang diperoleh adalah
� � � − � �= �1 + �2 + �3 + ....+ � = 43,4
10 = 4,34 m/s.
Pada gambar 4.14 (d) sudut 60° range kecepatan pasir antara 4,38 m/s sampai 4,97 m/s. Dari 10 pecobaan kecepatan rata - rata yang diperoleh adalah
� � � − � �= �1 + �2 + �3 + ....+ � = 46,8
10 = 4,68 m/s.
Pada Gambar 4.14 (d) sudut 60° range kecepatan tanah berwarna merah antara 4,38 m/s sampai 4,80 m/s. Dari 10 pecobaan kecepatan rata - rata yang diperoleh adalah
� � � − � �= �1 + �2 + �3 + ....+ � = 45,8
10 = 4,58 m/s.
Berdasarkan grafk hasil pengujian pada gambar 4.13 dan 4.14 dan tabel hasil pengujian pada lampiran A menunjukan hubungan antara kecepatan dengan perubahan waktu. Kecepatan dan waktu membentuk persamaan linear. Hubungan perubahan waktu dan kecepatan membentuk suatu persamaan
y = m.x + c.
4.2 Analisa
Pada saat pengujian jarak tiang penyangga terhadap dasar lintasan adalah ± 55cm. Dari seluruh percobaan yang dilakukan nilai keluaran dari sensor potensio menujukan range nilai ADC antara 160 sampai 354. Dengan nilai rata - rata ADC adalah 254. Dengan menggunakan rumus perbandingan maka jarak yang dapat dihitung oleh modul potensio sejauh
( � �� = ���� ��� ��� � )
55 � �� =
254
1024 = 56320/254 = ±221 cm. Jika pada saat 55cm nilai ADC 254
maka sensitifitas modul dapat dihitung dengan cara ( 10
55 = 254 ) = 2540/55 = ± 46
ADC/10cm.
4.3 Pengujian Perangkat Lunak
Perangkat lunak yang digunakan adalah Visual Basic 6.Perangkat lunakini berfungsi sebagai interface pada PC. Visual Basic 6 ini dirancang untuk menampilkan data yang dikirim oleh modul RTC data logger. Visul Basic 6 ini akan menerima data yang dikirim oleh transmitter dalam bentuk komunikasi serial. Setelah data diterima oleh Visual Basic, data kemudian tersimpan kedalam database. Database yang dibuat untuk menyimpan data yang diterima oleh receiver dan sebagai sistem akusisi data.
Gambar 4.15 Tampilan interface pada Visual Basic
Gambar 4.16 Data pada Microsoft Access
50
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan pembahasan pada bab sebelumnya, dapat diambil kesimpulan : 1. Modul data logger ini mampu mendeteksi pergeseran tanah sejauh ± 221
cm dengan sensitifitas 10cm = 46 nilai ADC.
2. Pengujian pada tanah berwarna merah dengan massa 500gram dan pasir dengan massa 500gram pada sudut 30° menghasilkan kecepatan rata - rata 1,39m/s dan 1,38m/s, pada sudut 45° menghasilkan kecepatan rata- rata 7,73m/s dan 7,78m/s dan pada sudut 60° menghasilkan kecepatan rata -rata 8,17 dan 8,22m/s.
3. Pengujian pada tanah berwarna merah dengan massa 1000gram dan pasir dengan massa 1000gram pada sudut 30°menghasilkan kecepatan rata - rata 0,77m/s dan 0,76m/s, pada sudut 45° menghasilkan kecepatan rata- rata 4,34m/s dan 4,31m/s, dan pada sudut 60° menghasilkan kecepatan rata - rata4,58m/s dan 4,68m/s.
4. Pengujian pada tanah berwarna merah dengan massa 500gram dan 1000gram pada sudut 15° tidak mengalami pergeseran. Pada pasir dengan massa 500gram dan 1000gram pada sudut 15° tidak mengalami pergeseran. 5. Data yang dikirim oleh modul wireless sama dengan data yang diambil oleh
sensor, artinya modul wireless bekerja dengan baik.
6. Data yang diambil merupakan data yang real time itu dibuktikan dengan tampilan pada LCD dan pada modul SD card sesuai dengan waktu pengambilan data.
5.2 Saran
Saran untuk penelitian selanjutnya agar lebih baik yaitu :
1. Penambahan sirine agar suara peringatan bisa diketahui dari jauh.
2. Menambahkan penguat agar data dari modul potensiometer lebih sensitif. 3. Gunakan modul wireless Xbee Pro agar jangkauan pengiriman data lebih
DAFTAR RIWAYAT HIDUP
Nama : Eko Aprianto
Tempat, Tanggal Lahir : Subang, 26 April 1990 Jenis Kelamin : Laki - Laki
Agama : Islam
Alamat Sementara : jl. Tubagus Ismail dalam gang. Satu, no 28A/153A. Dago
Alamat Tetap : Jl. Raya Tambakdahan Rt.03/02 Ds.Tambakdahan.
Kec.Tambakdahan - Subang. No. Telepon : 082316580508
Email : [email protected]
Pendidikan Formal
2009 - 2014 : Universitas Komputer Indonesia 2006 - 2009 : SMA N 1 PAMANUKAN 2003 - 2006 : SMP N 1 BINONG
1997 - 2003 : SD N 1 TAMBAKDAHAN