MENGGUNAKA
Disusun untuk memenuhi syarat kelulusan dalam menempuh pendidikan Program Sarjana
PROGRAM
FAKULTAS TEKN
UNIVERSITAS KO
MENGGUNAKAN MODULASI DIGITAL FSK
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan dalam menempuh pendidikan Program Sarjana pada Program Studi Teknik Elektro
Disusun oleh : ZAKIR ALI
1.31.05.007
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
2011
N MODULASI DIGITAL FSK-FM
Disusun untuk memenuhi syarat kelulusan dalam menempuh pendidikan Program
i
Indonesia merupakan negara yang rawan akan bencana letusan gunung berapi yang dapat terjadi sewaktu-waktu, untuk itu dibutuhkan tekhnologi yang dapat mengetahui tanda – tanda gunung berapi tersebut dalam keadaan aktif untuk mencegah jatuhnya korban jiwa, salah satunya adalah sistem telemetri.
Sistem telemetri dapat memantau keadaan gunung berapi dari jarak jauh menggunakan media transmisi kabel maupun udara. Dalam tugas akhir ini sistem telemetri dirancang menggunakan modulasi FSK dan FM dan menggunakan tiga sensor yaitu sensor suhu, getaran dan gas. Modulasi FSK dan FM ini berfungsi sebagai media transmisi yang akan mengirimkan data lewat media udara sehingga dapat diterima dari jarak jauh, sedangkan sensor sendiri berfungsi sebagai indera peraba yang akan mendeteksi perubahan keadaan gunung berapi tersebut dan data yang didapatkan akan ditampilkan pada PC.
ii
Indonesia is a country prone to catastrophic volcanic eruption that may occur at any time, for it needed technology that could find a sign of the volcano is active to prevent loss of life, one of which is a telemetry system. Telemetry system can monitor the volcano remotely using cable or air transmission media. In this final project telemetry system was designed using FSK and FM modulation and uses three sensors are temperature sensor, vibration and gas. FSK and FM modulation serves as a transmission medium that will transmit data over the air medium that is acceptable from a distance, while the sensor itself serves as the sense of touch that will detect the change of state of the volcano and the data obtained will be displayed on the PC.
iii
Puji syukur penulis panjatkan kehadirat Allah SWT karena berkat anugerah dan kuasanya penulis dapat menyelesaikan tugas akhir ini dengan judul “Perancangan Sistem Telemetri Untuk Pendeteksi Keadaan Gunung Berapi Menggunakan Modulasi Digital FSK-FM”. Selama penyusunan tugas akhir ini
penulis mengalami berbagai halangan, cobaan dan masalah yang silih berganti, tetapi akhirnya semua itu dapat penulis hadapi dengan sikap yang tegar dan tidak berputus-asa sehingga tugas akhir ini dapat terselesaikan dengan baik. Hal tersebut juga dapat terwujud tidak lepas dari dorongan, bimbingan dan bantuan dari berbagai pihak, sehingga semua kesulitan - kesulitan dapat diatasi. Oleh karena itu pada kesempatan yang baik ini penulis ingin mengucapkan rasa terima kasih yang sebesar – besarnya kepada :
1. Ayah Ibu yang tercinta yang selalu memberikan semangat, dorongan baik secara moril maupun materil dan selalu mendoakan saya sehingga saya dapat menyelesaikan kuliah di UNIKOM Bandung.
2. Bapak Muhammad Arya, MT., selaku Ketua Jurusan Teknik Elektro di UNIKOM.
3. Ibu Tri Rahajoeningroem, MT., selaku dosen wali dan koordinator tugas akhir yang telah memberikan kesempatan pada saya untuk menyelesaikan tugas akhir ini.
iv
6. Bapak Budi Herdiana, ST., yang selalu memberikan nasehat dan solusi baik secara teori maupun dalam hal perancangan alat.
7. Kepada anak – anak elektro UNIKOM angkatan 2003 sampai 2006 : Oding, Omen, Abah, Idur, Abang, Iip, Begung, Randi, dan bang Jufri Arab yang telah memberi masukkan kepada saya serta teman – teman lainnya yang telah memberikan dorongan serta saling membantu satu sama lain dalam mengerjakan tugas akhir.
8. Seseorang yang spesial yaitu Jayanti Oktavia yang telah memberikan dorongan, motivasi serta pengertiannya kepada penulis.
Penulis menyadari dengan sepenuhnya bahwa dngan keterbatasn ilmu yang dimiliki, penyusunan tugas akhir ini masih jauh dari kata sempurna, untuk itu dengan senang hati penulis menerima segala saran dan kritik yang sifatnya membangun agar tugas akhir ini menjadi lebih baik. Akhir kata, semoga tugas akhir ini dapat bermanfaat bagi kita semua. Amien
Bandung, Agustus 2011
Salah satu teknologi atau alat yang dapat membantu meringankan
pekerjaan manusia ialah teknologi telemetri dimana manusia dapat mengetahui
suatu hal atau keadaan dari jarak jauh tanpa harus berada di lokasi. Prinsip kerja
dari alat ini adalah menggunakan sensor dan gelombang radio, dimana suatu
besaran yang terdeteksi oleh sensor lalu dipancarkan lewat gelombang radio
sehingga sampai ke penerima. Atas dasar latar belakang itulah penulis mengambil
judul “ Perancangan Sistem Telemetri Untuk Pendeteksi Keadaan Gunung Berapi
Menggunakan Modulasi Digital FSK-FM”
1.2 Tujuan
Adapun tujuan dari pembuatan tugas akhir ini adalah :
Perancangan berbasiskan sistem telemetri ini diharapkan dapat digunakan
untuk mengukur suatu besaran seperti suhu, getaran dan volume gas dari jarak
jauh yang dapat diaplikasikan sebagai pendeteksi aktivitas gunung berapi
Mengetahui prinsip kerja dari sistem telemetri menggunakan modulasi FSK dan gelombang FM.
1.3 Rumusan Masalah
Bagaimana merancang dan membuat alat yang dapat mendeteksi besaran
suhu, gas dan getaran berbasiskan sistem telemetri sehingga dapat digunakan
untuk mendeteksi keadaan gunung berapi.
1.4 Batasan Masalah
Karena rumitnya pembuatan tugas akhir ini maka batasan masalah yang
Rangkaian pengirim dan penerima FM yang digunakan adalah rangkaian yang
sudah jadi..
Sensor yang digunakan adalah sensor suhu, sensor getar dan sensor gas Karbon
Monoksida (CO).
1.5 Metoda Penelitian
Dalam Menyelesaikan Tugas Akhir ini penulis melakukan langkah-langkah :
Mempelajari dan mengumpulkan data dari buku serta artikel-artikel yang
berhubungan dengan Tugas Akhir ini.
Melakukan Perancangan dan menentukan komponen yang akan digunakan
untuk pembuatan alat.
Melakukan pengujian alat untuk menetukan kinerja dari tiap rangkaian serta
melakukan pengukuran di laboratorium.
Melakukan konsultasi dengan pembimbing untuk mengetahui dan mengatasi
masalah serta hambatan yang timbul dalam pembuatan Tugas Akhir Ini.
1.6 Sistematika Penulisan
Sistematika penulisan laporan Tugas Akhir ini meliputi :
BAB I : PENDAHULUAN
Membahas latar belakang, tujuan, rumusan masalah, batasan masalah,
,metodologi penelitian dan sistematika penulisan.
BAB II : DASAR TEORI
Membahas teori dasar yang berhubungan dengan pembuatan tugas
BAB III : PERANCANGAN ALAT
Membahas cara kerja rangkaian, langkah-langkah perancangan dan
pembuatan perangkat ini.
BAB IV : PENGUJIAN ALAT
Berisi hasil pengukuran serta pengujian rangkaian dan analisa.
BAB V : PENUTUP
Berisi mengenai kesimpulan dari hasil pembuatan tugas akhir ini serta
30 buah di Bali dan Nusa Tenggara
16 buah di Maluku
18 buah di Sulawesi
Gunung berapi terdapat dalam beberapa bentuk sepanjang masa hidupnya. Gunung berapi yang aktif mungkin berubah menjadi separuh aktif, istirahat,
sebelum akhirnya menjadi tidak aktif atau mati. Bagaimanapun gunung berapi mampu istirahat dalam waktu 610 tahun sebelum berubah menjadi aktif kembali. Oleh itu, sulit untuk menentukan keadaan sebenarnya daripada suatu gunung
berapi itu, apakah gunung berapi itu berada dalam keadaan istirahat atau telah mati. Apabila gunung berapi meletus, magma yang terkandung di dalam kamar
magma di bawah gunung berapi meletus keluar sebagai lahar atau lava. Selain aliran lava, kehancuran oleh gunung berapi disebabkan melalui berbagai cara seperti berikut:
Tabel 2.1 Tingkat Isyarat Gunung Berapi di Indonesia
Letusan awal dimulai dengan abu dan asap
Letusan berpeluang terjadi dalam waktu 24 jam
SIAGA
Menandakan gunung berapi yang sedang bergerak
ke arah letusan atau menimbulkan bencana
Peningkatan intensif kegiatan seismik
Semua data menunjukkan bahwa aktivitas dapat
segera berlanjut ke letusan atau menuju pada
keadaan yang dapat menimbulkan bencana
WASPADA
Terdapat kenaikan aktivitas di atas level normal
Peningkatan aktivitas seismik dan kejadian
vulkanis lainnya
Sedikit perubahan aktivitas yang diakibatkan oleh
aktivitas magma, tektonik dan hidrotermal
NORMAL
Tidak ada gejala aktivitas tekanan magma
Level aktivitas dasar
secara fisik dan kimiawi. Dari pantauan ini pula status gunung berapi bisa ditentukan, waspada, siaga, dan awas. Selain hasil pantauan seismik di pos-pos pemantau gunung berapi, beberapa tanda gunung berapi meletus dapat dipantau
oleh mata awam, misalnya:
Suhu di sekitar kawah naik (normalnya rata-rata berkisar antara 100
C-400C).
Mata air menjadi kering.
Frekuensi getaran yang meningkat.
Tumbuhan di sekitar gunung layu.
Binatang di sekitar gunung bermigrasi.
Selain itu tanda-tanda gunung api meletus juga dapat disertai dengan keluarnya gas vulkanik dari dalam kawah antara lain gas Karbonmonoksida(CO),
Karbondioksida (CO2), Hidrogen Sulfida (H2S), Sulfurdioksida (SO2), dan
Nitrogen (NO2) yang dapat membahayakan manusia. Dengan mengetahui tanda-tanda tersebut maka para pemantau gunung berapi dapat memberitahukan kepada
masyarakat atau para wisatawan agar tidak mendekati gunung tersebut sehingga tidak menimbulkan korban.
2.2 Telemetri
Telemetri berasal dari akar bahasa Yunani yaitu tele = jarak jauh, dan
metron = pengukuran, jadi telemetri adalah sistem pengukuran jarak jauh dari parameter suatu obyek ( benda, ruang, kondisi alam), yang hasil pengukurannya di kirimkan ke tempat lain melalui proses pengiriman data baik dengan
data tersebut dapat dimanfaatkan langsung atau perlu dianalisa. Jadi pada dasarnya sistem telemetri ini dapat membantu pekerjaan manusia untuk memantau atau mengumpulkan data dari tempat yang jauh atau sulit dijangkau tanpa
bersusah payah datang ke lokasi. Dengan sistem telemetri ini kita hanya perlu membawa alat ukur dari sistem telemetri ini tanpa perlu membawa perangkat
pengolah datanya. Secara umum sistem telemetri terdiri atas enam bagian pendukung yaitu objek ukur, sensor, pemancar, saluran transmisi, penerima dan tampilan/display. Beberapa hal yang perlu diperhatikan dalam telemetri adalah
teknik modulasi dan saluran transmisi.
Modulasi merupakan proses konversi sinyal informasi menjadi suatu
gelombang sinus, atau penumpangan suatu sinyal (sinyal informasi) ke sinyal pembawa (carrier). Ada beberapa macam teknik modulasi yang biasa digunakan, tergantung pada parameter yang dimodulasi. Saluran transmisi adalah alat (device)
yang dipakai untuk menghubungkan antara sumber data dan penerima data (penampil). Pada bagian ini komponen berhubungan langsung dengan media
transmisinya, komponen yang dipakai adalah modem (modulator/demodulator). Komponen yang digunakan sebagai pengirim data adalah modulator digital FSK yang memodulasi data yang berasal dari sensor untuk kemudian dikirimkan ke
pemancar FM. Data yang telah dipancarkan lalu dikirimkan ke penerima FM untuk kemudian dimodulasi kembali oleh demodulator FSK. Setelah itu data yang
berupa tegangan TTL (Transistor Transistor Logic) masuk ke dalam rangkaian pengolah data yang kemudian mengubahnya ke level tegangan RS232 untuk komunikasi serial komputer. Rangkaian ini kemudian dihubungkan secara seri
adalah sebagai penampil data untuk keperluan analisa atau dapat diolah untuk keperluan lebih lanjut.
2.3 Sensor
Sensor adalah peralatan yang digunakan untuk mendeteksi ataupun
mengukur ukuran dari sebuah obyek penelitian, yaitu dengan mengubah besaran fisik atau kimia menjadi suatu sinyal listrik. Sensor umumnya dikategorikan menurut obyek yang diukur dan memiliki peranan penting, baik dalam sebuah
proses monitoring maupun proses pengendalian modern.
Dalam memilih peralatan sensor yang tepat dan sesuai dengan sistem yang
akan disensor maka perlu diperhatikan persyaratan umum sensor berikut ini : a. Linearitas
Ada banyak sensor yang menghasilkan sinyal keluaran yang berubah secara kontinyu sebagai tanggapan terhadap masukan yang berubah secara
kontinyu. Sebagai contoh, sebuah sensor panas dapat menghasilkan tegangan sesuai dengan panas yang dirasakannya. Dalam kasus seperti ini, biasanya dapat
100
(a) Tanggapan linier (b) Tanggapan non linier
Gambar 2.1. Keluaran dari Sensor Panas
diketahui secara tepat bagaimana perubahan keluaran dibandingkan dengan masukannya berupa sebuah grafik. Gambar 2.1 memperlihatkan hubungan dari dua buah sensor panas yang berbeda. Garis lurus pada gambar 2.1(a).
memperlihatkan tanggapan linier, sedangkan pada gambar 2.1(b). adalah tanggapan non-linier.
b. Sensitivitas
Sensitivitas akan menunjukan seberapa jauh kepekaan sensor terhadap kuantitas yang diukur. Sensitivitas sering juga dinyatakan dengan bilangan yang
menunjukan “perubahan keluaran dibandingkan unit perubahan masukan”. Beberepa sensor panas dapat memiliki kepekaan yang dinyatakan dengan “satu
volt per derajat”, yang berarti perubahan satu derajat pada masukan akan menghasilkan perubahan satu volt pada keluarannya. Sensor panas lainnya dapat saja memiliki kepekaan “dua volt per derajat”, yang berarti memiliki kepekaan
dua kali dari sensor yang pertama. Linieritas sensor juga mempengaruhi sensitivitas dari sensor. Apabila tanggapannya linier, maka sensitivitasnya juga
akan sama untuk jangkauan pengukuran keseluruhan. Sensor dengan tanggapan pada gambar 2.1(b) akan lebih peka pada temperatur yang tinggi dari pada temperatur yang rendah.
c. Tanggapan Waktu
Tanggapan waktu pada sensor menunjukan seberapa cepat tanggapannya
temperatur terjadi sedikit demi sedikit dan kontinyu terhadap waktu, seperti tampak pada gambar 2.2(a).
Frekuensi adalah jumlah siklus dalam satu detik dan diberikan dalam
satuan hertz (Hz).{ 1 hertz berarti 1 siklus per detik, 1 kilohertz berarti 1000 siklus per detik}. Pada frekuensi rendah, yaitu pada saat temperatur berubah
secara lambat, termometer akan mengikuti perubahan tersebut dengan “setia”. Tetapi apabila perubahan temperatur sangat cepat lihat gambar 2.2(b) maka tidak diharapkan akan melihat perubahan besar pada termometer merkuri, karena ia
bersifat lamban dan hanya akan menunjukan temperatur rata-rata.
Ada bermacam cara untuk menyatakan tanggapan frekuensi sebuah sensor.
Misalnya “satu milivolt pada 500 hertz”. Tanggapan frekuensi dapat pula dinyatakan dengan “decibel (db)”, yaitu untuk membandingkan daya keluaran
pada frekuensi tertentu dengan daya keluaran pada frekuensi referensi.
Klasifikasi Sensor
Secara umum berdasarkan fungsi dan penggunaannya sensor dapat dikelompokan menjadi 3 bagian yaitu:
(a) Perubahan lambat (b) Perubahan cepat
a. Sensor thermal (panas)
Sensor thermal adalah sensor yang digunakan untuk mendeteksi gejala
perubahan panas/temperature/suhu pada suatu dimensi benda atau dimensi ruang tertentu, Contohnya; bimetal, termistor, termokopel, RTD, photo transistor, photo dioda, photo multiplier, photovoltaik, infrared pyrometer, hygrometer,dsb.
b. Sensor mekanis
Sensor mekanis adalah sensor yang mendeteksi perubahan gerak mekanis, seperti perpindahan atau pergeseran atau posisi, gerak lurus dan melingkar,
tekanan, aliran, level dsb, Contoh; strain gage, linear variable deferential transformer (LVDT), proximity, potensiometer, load cell, bourdon tube, dsb.
c. Sensor optik (cahaya)
Sensor optik atau cahaya adalah sensor yang mendeteksi perubahan cahaya dari sumber cahaya, pantulan cahaya ataupun bias cahaya yang mengernai benda
atau ruangan, Contoh; photo cell, photo transistor, photo diode, photo voltaic, photo multiplier, pyrometer optic,dsb.
2.4 Penguat Operasional (Op-Amp)
Penguat operasional (op-amp) merupakan kumpulan puluhan transistor
dan resistor dalam bentuk satu chip IC. Op-Amp merupakan komponen aktif linear yang merupakan penguat gandeng langsung (direct coupling), dengan
menjumlahkan, mengalikan, membagi, mendiferensialkan, serta mengintegralkan tegangan listrik. IC Op-Amp sering dipakai untuk perhitungan-perhitungan analog, instrumentasi, maupun berbagai macam aplikasi kontrol.
2.4.1 Penguat Inverting
Padainverting amplifier ini, input dengan outputnya berlawanan polaritas. Jadi ada tanda minus pada rumus penguatannya.
Penguatan inverting amplifier adalah bisa lebih kecil nilai besaran dari 1,
misalnya -0.2 , -0.5 , -0.7 , dst dan selalu negatif. Rumusnya :
= − . ……….(2.1)
Gambar 2.3 Rangkaian Inverting Amplifier
2.4.2 Penguat Non-Inverting
Rangkaian non-inverting ini hampir sama dengan rangkaian inverting
hanya perbedaannya adalah terletak pada tegangan inputnya dari masukan non-inverting.
Rumusnya seperti berikut :
Sehingga persamaannya menjadi :
= + 1 . ………(2.3)
Hasil tegangan output non-inverting ini akan lebih dari satu dan selalu positif.
Rangkaiannya adalah seperti pada gambar berikut ini :
Gambar 2.4 RangkaianNon-inverting Amplifier
2.5 Multiplekser
Multiplekser adalah suatu piranti elektronis yang mampu menyalurkan salah satu masukan dari banyak masukan pada sebuah kanal keluaran. Pemilihan
masukan dilakukan melalui masukan selektor sebagai penyeleksi masukan yang akan dikeluarkan pada kanal keluaran. Gambar 4.1 menunjukkan bagan kerja MUX.
Selektor pada MUX akan memilih saklar yang akan dihubungkan. Jumlah masukan selektor adalah ‘n’ yang dapat menyeleksi ‘2n’ saluran masukan. Contoh: Sebuah MUX 4 ke 1 akan memiliki dua buah Selektor, yaitu S1 dan S2.
Ketika saluranEnable = 1, keluaran selalu bernilai ‘0’. Tetapi ketika saluran Enable = 0, maka keluaran F diatur melalui S1 dan S2. Tabel kebenaran MUX ini
dinyatakan sebagai berikut:
Tabel 2.2Logika Kebenaran MUX 4 ke 1
2.6 ADC (Analog to Digital Converter )
ADC adalah suatu rangkaian yang mengkonversikan sinyal analog menjadi sinyal digital. Ada beberapa jenis rangkaian ADC antara lain Servo ADC,
Successive Approximation dan Parallel Converter. Keluaran dari sensor masih berupa besaran analog, untuk itu diperlukan sebuah komponen ADC yang
berfungsi untuk mengubah besaran analog tersebut menjadi besaran digital, agar selanjutnya dapat diproses oleh mikrokontroler. ADC adalah komponen untuk mengubah sinyal listrik analog menjadi sinyal diskrit, yang diwakili oleh susunan
bit-bit kombinasi tertentu. Komponen ini bertugas untuk membantu komputer
dalam pengambilan data analog, karena komputer hanya bekerja dalam domain digital, yang hanya mampu membaca sinyal diskrit saja, sedangkan banyak sistem yang ada di luar memakai sistem analog, sehingga sinyal analog harus diubah dulu
ke dalam bentuk digital. Beberapa parameter Penting yang harus diperhatikan pada ADC ialah :
1. Resolusi konversi ADC
Resolusi konversi dari sebuah konverter analog ke digital adalah, dimana kita dapat mengkonversikan data analog kedalam bit-bit digital tersebut, apakah
data analog tersebut akan dikonversikan ke dalam data 8bit, 16 bit atau 32bit, ini tergantung keinginan si perancang desain dan tergantung dari kekompatibelan
device yang nanti akan di interface kan. Misalkan ingin menginterfacekan ADC dengan mikrokontroller maka harus dilihat support untuk berapa bit kah mikrokontroller tersebut, dan biasanya mikrokontroller support untuk ADC
dengan resolusi 8 bit. 2. Time Konversi
Time konversi atau waktu konversi adalah waktu yang dibutuhkan oleh ADC untuk mengkonversi data analog ke digital, untuk menentukan time konversi ini tentunya kita harus melihat di datasheet nya, dan harus dilihat untuk kebutuhan
seperti apa. Time konversi semakin tinggi mungkin semakin baik, tetapi harus didukung pula untuk interface nya seperti apa, misal untuk mikrokontroller yang
support untuk time lebih besar maka tidak akan cocok bila menggunakan ADC dengan time yang lebih besar, penentuan time konversi ini perlu disesuaikan dengan design interface nya seperti apa. Jika semua device nya mendukung untuk
itu akan menjadi lebih baik. di bawah ini adalah contoh rangkaian dasar dari ADC tipe 080x :
Gambar 2.6 Rangkaian Dasar dari ADC tipe 080x
2.7 Mikrokontroler
Mikrokontroler adalah sebuah sistem komputer fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil
RAM, memori program, atau keduanya), dan perlengkapan input output. Dengan kata lain, mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus
dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data. Mikrokontroler merupakan komputer didalam chip yang digunakan untuk
mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya bisa disebut “pengendali kecil” dimana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen
Mikrokonktroler digunakan dalam produk dan alat yang dikendalikan secara automatis, seperti sistem kontrol mesin, remote control, mesin kantor, peralatan rumah tangga, alat berat, dan mainan. Dengan mengurangi ukuran,
biaya, dan konsumsi tenaga dibandingkan dengan mendesain menggunakan mikroprosesor memori, dan alat input output yang terpisah, kehadiran
mikrokontroler membuat kontrol elektrik untuk berbagai proses menjadi lebih ekonomis. Dengan penggunaan mikrokontroler ini maka :
Sistem elektronik akan menjadi lebih ringkas.
Rancang bangun sistem elektronik akan lebih cepat karena sebagian besar
dari sistem adalah perangkat lunak yang mudah dimodifikasi.
Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang
kompak.
Agar sebuah mikrokontroler dapat berfungsi, maka mikrokontroler
tersebut memerlukan komponen eksternal yang kemudian disebut dengan sistem minimum. Untuk membuat sistem minimal paling tidak dibutuhkan sistem clock
dan reset, walaupun pada beberapa mikrokontroler sudah menyediakan sistem
clock internal, sehingga tanpa rangkaian eksternal pun mikrokontroler sudah beroperasi.
Untuk merancang sebuah sistem berbasis mikrokontroler, kita memerlukan perangkat keras dan perangkat lunak, yaitu:
1. Sistem minimum mikrokontroler.
Yang dimaksud dengan sistem minimum adalah sebuah rangkaian mikrokontroler yang sudah dapat digunakan untuk menjalankan sebuah aplikasi. Sebuah IC mikrokontroler tidak akan berarti bila hanya berdiri sendiri.
2.7.1 Jenis-jenis Mikrokontroller
Secara teknis, hanya ada 2 macam mikrokontroller. Pembagian ini didasarkan pada kompleksitas instruksi-instruksi yang dapat diterapkan pada mikrokontroler tersebut. Pembagian itu yaitu RISC dan CISC.
RISC merupakan kependekan dari Reduced Instruction Set
Computer.Instruksi yang dimiliki terbatas, tetapi memiliki fasilitas yang lebih banyak.
CISC kependekan dari Complex Instruction Set Computer. Instruksi bisa
dikatakan lebih lengkap tapi dengan fasilitas secukupnya.
Masing-masing mempunyai keturunan atau keluarga sendiri-sendiri. Berikut ini adalah pembagian jenis-jenis mikrokonktroler yang telah umum digunakan :
1. Keluarga MCS51
Mikrokonktroler ini termasuk dalam keluarga mikrokonktroler CISC. Sebagian besar instruksinya dieksekusi dalam 12 siklus clock. Mikrokontroler ini
ROM luar 64KB dan RAM luar 64KB diberikan alamat dengan cara jalur pemilihan chip yang terpisah untuk akses program dan memori data. Salah satu kemampuan dari mikrokontroler 8051 adalah pemasukan sebuah mesin pemroses
boolean yang mengijikan operasi logika boolean tingkatan-bit dapat dilakukan secara langsung dan secara efisien dalam register internal dan RAM. Karena
itulah MCS51 digunakan dalam rancangan awal PLC (Programmable Logic Control).
2. AVR
Mikrokonktroler Alv and Vegard’s Risc processor atau sering disingkat AVR merupakan mikrokonktroler RISC 8 bit. Karena RISC inilah sebagian besar
kode instruksinya dikemas dalam satu siklus clock. AVR adalah jenis mikrokontroler yang paling sering dipakai dalam bidang elektronika dan instrumentasi. Secara umum, AVR dapat dikelompokkan dalam 4 kelas. Pada
dasarnya yang membedakan masing-masing kelas adalah memori, peripheral dan fungsinya. Keempat kelas tersebut adalah keluarga ATTiny, keluarga AT90Sxx,
keluarga ATMega dan AT86RFxx.
3. PIC
Pada awalnya, PIC merupakan kependekan dari Programmable Interface
Controller. Tetapi pada perkembangannya berubah menjadi Programmable Intelligent Computer. PIC termasuk keluarga mikrokonktroler berarsitektur
Divisi Mikroelektronik General Instruments dengan nama PIC1640. PIC cukup popular digunakan oleh para developer dan para penghobi elktronika karena biayanya yang rendah, ketersediaan dan penggunaan yang luas, database aplikasi
yang besar, serta pemrograman (dan pemrograman ulang) melalui hubungan serial pada komputer.
2.7.3 Mikrokontroler AT89S52
AT89S52 adalah salah satu anggota dari keluarga MCS-51/52 yang
dilengkapi dengan internal 8 Kbyte Flash PEROM (Programmable and Erasable Read Only Memory), yang memungkinkan memori program untuk dapat
diprogram kembali. Mikrokontroler AT89S52 memiliki :
Sebuah CPU ( Central Processing Unit ) 8 Bit.
256 byte RAM ( Random Acces Memory ) internal.
Empat buah port I/O, yang masing masing terdiri dari 8 bit.
Osilator internal dan rangkaian pewaktu.
Dua buah timer/counter 16 bit.
Lima buah jalur interupsi ( 2 buah interupsi eksternal dan 3 interupsi
internal).
Sebuah port serial dengan full duplex UART (Universal Asynchronous
Receiver Transmitter).
Mampu melaksanakan proses perkalian, pembagian, dan Boolean.
Kecepatan maksimum pelaksanaan instruksi per siklus adalah 0,5 μs pada
frekuensi clock 24 MHz. Apabila frekuensi clock mikrokontroler yang
digunakan adalah 12 MHz, maka kecepatan pelaksanaan instruksi adalah 1
μs.
CPU ( Central Processing Unit )
Bagian ini berfungsi mengendalikan seluruh operasi pada mikrokontroler. Unit ini terbagi atas dua bagian, yaitu unit pengendali atau CU ( Control Unit )
dan unit aritmatika dan logika atau ALU ( Aritmetic logic Unit ) Fungsi utama unit pengendali adalah mengambil instruksi dari memori (fetch) kemudian menterjemahkan susunan instruksi tersebut menjadi kumpulan proses kerja
sederhana (decode), dan melaksanakan urutan instruksi sesuai dengan langkah-langkah yang telah ditentukan program (execute). Unit aritmatika dan logika
merupakan bagian yang berurusan dengan operasi aritmatika seperti penjumlahan, pengurangan, serta manipulasi data secara logika seperti operasi AND, OR, dan perbandingan.
Bagian Masukan/Keluaran (I/O)
Bagian ini berfungsi sebagai alat komunikasi serpih tunggal dengan piranti di luar sistem. Sesuai dengan namanya, perangkat I/O dapat menerima maupun memberi data dari /ke serpih tunggal. Ada dua macam piranti I/O yang digunakan,
yaitu piranti untuk hubungan serial UART (Universal Asynchronous Receiver Transmitter) dan piranti untuk hubungan pararel yang disebut dengan PIO
Konfigurasi Pin
Mikrokontroler AT89S52 mempunyai 40 pin dengan catu daya tunggal 5 Volt. Ke-40 pin tersebut digambarkan sebagai berikut :
Gambar 2.7 Konfigurasi Pin Mikrokontroler AT89S52
Berikut adalah penjelasan mengenai fungsi dari tiap-tiap pin (kaki) yang ada pada mikrokontroller AT89S52 :
a. Port 0
Merupakan dual-purpose port (port yang memiliki dua kegunaan). Pada disain yang minimum (sederhana), port 0 digunakan sebagai port Input/Output (I/O). Port 0 terdapat pada pin 32-39
b. Port 1
Merupakan port yang hanya berfungsi sebagai port I/O (Input/Output).
c. Port 2
Merupakan dual-purpose port. Pada desain minimum digunakan sebagai port I/O (Input/Output). Sedangkan pada desain lebih lanjut digunakan sebagai
high byte dari address (alamat). Port 2 terdapat pada pin 21-28.
d. Port 3
Merupakan dual-purpose port. Selain sebagai port I/O (Input/Output), port 3 juga mempunyai fungsi khusus. Fungsi khusus tersebut diperlihatkan pada tabel berikut :
Tabel 2.3Data Port 3 pin 10 -17
No.Pin Port Pin Nama Port Fungsi Alternatif
10 P3.0 RXD Menerima data untuk port serial
12 P3.1 TXD Mengirim data untuk port serial
17 P3.2 INT 0 Interupsi eksternal 0
18 P3.3
INT 1 Interupsi eksternal 1
19 P3.4 T0 Interupt eksternal waktu /pencacah 0
20 P3.5 T1 Interupt eksternal waktu/pencacah 1
21 P3.6
WR Sinyal tanda baca memori data eksternal
22 P3.7
RD Sinyal tanda tulis memori data eksternal
e. PSEN (Program Store Enable)
PSEN adalah sinyal kontrol yang mengizinkan untuk mengakses program
PSEN akan selalu bernilai “1” (HIGH) pada pembacaan program memori internal. PSEN terdapat pada pin 29.
f. ALE (Address Latch Enable)
ALE digunakan untuk men-demultiplex address (alamat) dan data bus. ketika menggunakan program memori eksternal, port 0 akan berfungsi sebagai
address (alamat) dan data bus. Pada setengah paruh pertama memori cycle ALE akan bernilai “1” (HIGH) sehingga mengizinkan penulisan address (alamat) pada register eksternal. Dan pada setengah paruh berikutnya akan bernilai “1” (HIGH)
sehingga port 0 dapat digunakan sebagai data bus. ALE terdapat pada pin 30.
g. EA (External Access)
Jika EA diberi input “1” (HIGH), maka mikrokontroller menjalankan program memori internal saja. Jika EA diberi input “0” (LOW), maka AT89S52 menjalankan program memori eksternal (PSEN akan bernilai “0”). EA terdapat
pada pin 31.
h. RST (Reset)
RST terdapat pada pin 9. Jika pada pin ini diberi input “1” (HIGH) selama minimal 2 machine cycle, maka sistem akan di-reset dan register internal AT89S52 akan berisi nilai default tertentu. Proses reset merupakan proses untuk
mengembalikan sistem ke kondisi semula. Reset tidak mempengaruhi internal program memory. Reset terjadi jika pin RST bernilai high selama minimal dua
proses ini, maka pin RST harus diberi tambahan rangkaian seperti pada gambar berikut :
Gambar 2.8Rangkaian Reset AT89S52
i. On-Chip oscillator
AT89S52 telah memiliki on-chip oscillator yang dapat bekerja jika drive
menggunakan kristal. Tambahan kapasitor diperlukan untuk menstabilkan sistem. Nilai kristal yang biasa digunakan pada AT89S52 ini adalah 12 MHz. On-chip
oscillator tidak hanya dapat di-drive dengan menggunakan kristal, tetapi juga dapat dengan menggunakan TTL Oscillator.
j. XTAL1
XTAL1 berfungsi sebagai masukan dari rangkaian osilasi mikrokontroler. XTAL1 terdapat pada pin 19.
k. XTAL2
XTAL2 berfungsi sebagai keluaran dari rangkaian osilasi mikrokontroler. XTAL2
terdapat pada pin 18.
l. VCC
VCC merupakan masukan sumber tegangan positif bagi mikrokontroler yang
Memori Program
Memori program merupakan suatu ruang memori yang digunakan untuk menyimpan kode program dan konstanta yang sifatnya tetap. Memori program
hanya bisa dibaca saja (Read Only Memori), dalam artian ketika sedang melakukan eksekusi program memori hanya bersifat di baca saja namun tidak dapat diubah isinya, sebagian memori program terdapat didalam chip
mikrokontroler (On-chip) dan sebagian lagi berada diluar (off-chip). Mikrokontroler ATMEL AT89S52 mempunyai kapasitas memori program
on-chip sebesar 8 kB.
Memori Data
RAM merupakan memori data internal (on-chip). Untuk AT89S52
mempunyai memori sebesar 256 byte. Pada segment data ini dibagi menjadi tiga bagian, dimulai dari alamat 0×00 sampai dengan 0xFh dikenal sebagai
register R0 sampai dengan R7 yang diorganisasikan menjadi 4 bank. Pemilihan bank yang dilakukan dengan memberikan kombinasi logika pada register Program Status Word (PSW). Bagian berikutnya adalah mulai alamat
0×20 sampai dengan 0x2f sebanyak 128 bit merupakan lokasi memori yang dapat dimanipulasi perbit (bit addressable) juga dikenal dengan segment bit
(BDATA). Bagian berikutnya adalah general purpose RAM mulai alamat 0×30 sampai dengan 0x7fh.
Interuksi
a. Instruksi Aritmatika
Kelompok intruksi ini melakukan operasi aritmatika seperti penjumlahan, pembagian, pengurangan. Misalnya adalah: add, mul, subb, inc dan dec
Contohnya : Mov a,#10h
Mov b,#05h
Mov a,#10h artinya salin data 10h ke a Mov b,#05h artinya salin data 05h ke b
Mul ab artinya kalikan nilai akumulator dengan nilai register b
b. Instruksi Logika
Intruksi ini melakukan operasi logika seperti and, or, exor dan clear Misalnya adalah : anl, orl, xrl, clr,Contohnya : clr p3.5 Clr p3.5, artinya nolkan p3.5.
c. Instruksi Transfer Data
Kelompok instruksi ini digunakan untuk memindahkan data antara lain :
2.8 Modulasi
Modulasi adalah suatu proses penumpangan sinyal-sinyal informasi baik berupa suara, gambar atau data ke dalam sinyal pembawa (carrier) yang
berfrekuensi lebih tinggi, sehingga dapat ditransmisikan ke tujuan. Informasi yang ditransmisikan bisa berupa data analog maupun data digital sehingga terdapat dua jenis modulasi yaitu:
1. Modulasi Analog 2. Modulasi Digital
Adapun tujuan dari modulasi itu adalah :
Agar transmisi menjadi efisien atau memudahkan pemancaran.
Untuk Menekan derau atau interferensi.
Untuk memudahkan pengaturan alokasi frekuensi radio.
Sebagai multiplexing yaitu proses penggabungan beberapa sinyal
informasi untuk disalurkan secara bersama-sama melalui satu kanal transmisi.
2.8.1 Modulasi Analog
Dalam modulasi analog, proses modulasi merupakan respon atas informasi sinyal analog. Modulasi analog yang umum dikenal ada beberapa macam bentuk modulasi antara lain :
Modulasi Amplitudo ( Amplitude Modulation -AM)
Modulasi Amplitudo Pulsa ( Pulse Amplitudo Modulation -PAM)
2.8.1.1 Modulasi Amplitudo
Modulasi ini adalah modulasi yang paling sederhana, dimana frekuensi pembawa atau carrier diubah amplitudonya sesuai dengan sinyal informasi atau
message signal yang akan dikirimkan. Dengan kata lain AM adalah modulasi
yang mana amplitudo dari sinyal pembawa (carrier) berubah karakteristiknya sesuai dengan amplitudo sinyal informasi. Modulasi ini disebut juga linear
modulation, artinya bahwa pergeseran frekuensinya bersifat linier mengikuti sinyal informasi yang akan ditransmisikan. Frekuensi sinyal pemodulasi biasanya merupakan sinyal pada rentang frekuensi audio ( Audio Frequency - AF) yaitu
antara 20 Hz sampai dengan 20 kHz. Sedangkan frekuensi sinyal pembawa biasanya berupa sinyal radio (Radio Frequency - RF) pada rentang frekuensi
tengah ( Mid-Frequency – MF ) yaitu antara 300 kHz sampai dengan 3 Mhz. Proses modulasi antara sinyal informasi dengan sinyal pembawa pada AM adalah sebagai berikut :
2.8.1.2 Modulasi Frekuensi (FM)
Modulasi frekuensi adalah suatu proses modulasi dengan cara mengubah frekuensi gelombang pembawa sinusoidal yaitu dengan cara menyelipkan sinyal
sinyal pemodulasi pada gelombang pembawa. Jika sinyal informasi (sinyal pemodulasi) telah diselipkan maka frekuensi gelombang pembawa akan naik menuju harga maksimum, sesuai dengan amplitudo dari sinyal pemodulasi yang
naik menuju harga maksimum dalam arah positif. Kemudian frekuensi gelombang pembawa akan turun kembali menuju harga nol. Selanjutnya pada setengah siklus
berikutnya, frekuensi gelombang pembawa akan turun ke harga minimum, sesuai dengan harga amplitudo sinyal pemodulasi yang menuju negatif, kemudian frekuensi gelombang pembawa akan naik kembali munuju harga aslinya sesuai
dengan harga ampliduto sinyal pemodulasi yang turun kembali ke harga nol.
Modulasi FM merupakan modulasi analog yang sangat banyak digunakan, hal ini dikarenakan noise yang rendah, tahan terhadap perubahan amplitudo yang berubah-ubah sebagai akibat fading.
2.8.1.3 Modulasi Amplitudo Pulsa (PAM)
Konsep dasar PAM adalah merubah amplitudo sinyal pembawa yang masih berupa deretan pulsa (diskrit) dimana perubahannya mengikuti bentuk amplitudo dari sinyal informasi yang akan dikirimkan ketempat tujuan. Sehingga
sinyal informasi yang dikirim tidak seluruhnya tapi hanya sampelnya saja
(sampling signal).
Gambar 2.11 Modulasi Amplitudo Pulsa (PAM)
2.8.2 Modulasi Digital
Pada modulasi digital, suatu sinyal analog dimodulasi berdasarkan aliran
data digital. Modulasi sinyal digital dengan gelombang pembawa analog akan meningkatkan Sinyal to Noise Ratio (SNR) jika dibandingkan dengan modulasi
parameter gelombang pembawa. Ada tiga macam teknik umum yang dipakai dalam sistem modulasi digital antara lain :
Phase Shift Keying (PSK), digunakan suatu jumlah terbatas berdasarkan
fase.
Frekeunsi Shift Keying (FSK), digunakan suatu jumlah terbatas
berdasarkan frekuensi.
Amplitudo Shift Keying (ASK), digunakan suatu jumlah terbatas amplitudo.
2.8.2.1 Phase Shift Keying (PSK)
Pada modulasi PSK (diterjemahkan sebagai penguncian penggeseran phasa), sinyal pemodulasi yang berupa sinyal digital digunakan untuk memodulasi
fase sinyal pembawa sinusoidal. Jika sinyal informasi mempunyai logika “1” maka sistem akan mentransmisikan sinyal pembawa dengan suatu fase tertentu misalnya fase 0, sedangkan jika sinyal informasi mempunyai logika “0” maka
sistem akan mentransmisikan sinyal pembawa dengan suatu fase yang lain, misalnya fase 180°. Dengan demikian, maka sinyal PSK yang ditransmisikan
adalah sinyal sinusoidal dengan amplitudo konstan dengan fase yang sesuai dengan arus data pada sinyal informasi. Berikut ini adalah gambar dari sinyal termodulasi PSK.
2.8.2.2 Frekuency Shift Keying (FSK)
Frequency Shift Keying (FSK) merupakan sistem modulasi digital yang relatif sederhana, dengan kinerja yang kurang begitu bagus dibandingkan sistem
PSK dan QAM. FSK biner adalah sebuah bentuk modulasi sudut dengan envelope
konstan yang mirip dengan FM konvensional, kecuali bahwa dalam modulasi FSK, sinyal pemodulasi berupa aliran pulsa biner yang bervariasi diantara dua
level tegangan diskrit sehingga berbeda dengan bentuk perubahan yang kontinyu pada gelombang analog. Ekspresi yang umum sebuah sinyal FSK biner adalah :
...(2.4)
Dimana :
v(t) = bentuk gelombang FSK biner
Vc = puncak amplitudo carrier tanpa termodulasi
ωc = carrier frekuensi (dalam radian)
fm(t) = frekuensi sinyal digital biner pemodulasi
Δω = beda sinyal pemodulasi (dalam radian)
Pada sebuah modulator FSKcenter dari frekuensi carrier tergeser oleh masukan data biner, maka keluaran pada modulator FSK adalah sebuah fungsi
step pada domain frekuensi. Sesuai perubahan sinyal masukan biner dari suatu
logika “0” ke logika “1” dan sebaliknya, dalam metode FSK angka tersebut kemudian dipresentasikan ke dalam bentuk frekuensi, dan keluaran FSK bergeser
frequency atau logika “0”. Terdapat perubahan frekuensi output setiap adanya perubahan kondisi logic pada sinyal input. Sebagai konsekuensinya, laju perubahan output adalah sebanding dengan laju perubahan input, maka perubahan
output pada FSK sebanding dengan perubahan yang terjadi pada sinyal inputnya. Dalam modulasi digital, laju perubahan input pada modulator disebut bit rate dan
memiliki satuan bit per second. Sedangkan laju perubahan pada output modulator disebut baud rate.Sehingga pada modulasi FSK bit rate sama dengan baud rate.
2.8.2.2 Amplitudo Shift Keying (ASK)
Pada modulasi ASK (diterjemahkan sebagai penguncian penggeseran amplitudo), sinyal pemodulasi yang berupa sinyal digital digunakan untuk
memodulasi amplitudo sinyal pembawa sinusoidal. Jika sinyal informasi mempunyai logika “1” maka sistem akan mentransmisikan sinyal pembawa dengan suatu amplitudo, sedangkan jika sinyal informasi mempunyai logika “0”
maka sistem akan mentransmisikan sinyal pembawa dengan suatu amplitudo yang lain. Dengan demikian, maka sinyal ASK yang ditransmisikan adalah sinyal
sinusoidal dengan frekuensi dan fase konstan namun dengan amplitudo yang berubah-ubah sesuai dengan arus data pada sinyal informasi. Dalam modulasi ASK, amplitudo carrier tersaklar ON dan OFF sesuai dengan kecepatan sinyal
pemodulasi. Sinyal direpresentasikan dalam dua kondisi perubahan amplitudo gelombang pembawa, yaitu logika “1” dan “0”. Logika “1” direpresentasikan
dengan status “ON” (ada gelombang pembawa) sedangkan logika “0” direpresentasikan dengan status “OFF” (tidak ada gelombang pembawa). Dari dua kondisi tersebut, maka didapatkan sebuah sinyal yang termodulasi ASK. Berikut
adalah gambar hubungan sinyal digital dengan sinyal termodulasi ASK :
0 0 1 1 0 1 0 0 0 1 0
Sinyal data digital
Sinyal termodulasi
ASK
(b)
Gambar 3.1(a) Blok Diagram Sistem Telemetri Bagian Pengirim Data (b) Blok Diagram Sistem Telemetri Bagian Penerima Data
3.2 Perancangan Perangkat Keras (hardware)
Perancangan perangkat keras ini meliputi perancangan
komponen-komponen yang dibutuhkan serta tata letak komponen-komponen pada masing-masing
rangkaian baik secara manual maupun menggunakan software elektronika hingga
menjadi rangkaian elektronika yang dipasang pada PCB.
3.2.1 Sensor Suhu LM 35
Pada Tugas Akhir ini sensor suhu yang digunakan adalah sensor suhu seri
LM 35, LM 35 adalah sensor suhu yang teliti dan terkemas dalam bentuk
Integrated Circuit(IC), dimana output tegangan keluaran sangat linear
berpadanan dengan perubahan suhu. Sensor ini berfungsi sebagai pengubah dari
besaran fisis suhu ke besaran tegangan yang memiliki koefisien sebesar 10 mV
/°C yang berarti bahwa kenaikan suhu 1° C maka akan terjadi kenaikan tegangan
sebesar 10 mV. IC LM 35 ini tidak memerlukan pengkalibrasian atau penyetelan
dari luar karena ketelitiannya sampai lebih kurang seperempat derajat celcius pada
supply sehingga panas yang ditimbulkan sendiri sangat rendah kurang dari 0 ° C
di dalam suhu ruangan. Adapun keistimewaan dari IC LM 35 adalah :
Kalibrasi dalam satuan derajat celcius.
Lineritas +10 mV/ º C.
Akurasi 0,5 º C pada suhu ruang.
Range +0 º C – 150 º C.
Dioperasikan pada catu daya 4 V – 20 V.
Arus yang mengalir kurang dari 60 µA
Gambar 3.2Konfigurasi Sensor Suhu LM35
3.2.2 Sensor Gas TGS 2442
Sensor gas yang dipakai dalam tugas akhir ini adalah sensor TGS 2442
yang berfungsi sebagai pendeteksi gas KarbonMonoksida (CO). Sensor ini
mempunyai nilai resistansi Rx yang akan berubah bila terkena gas Karbon
Monoksida (CO). Selain itu sensor ini juga mempunyai sebuah pemanas (heater)
yang digunakan untuk membersihkan ruangan sensor dari kontaminasi udara luar.
Elemen dari sensor terdiri dari bahan semikonduktor, metaloksida dan
aluminasubtrate yang digabung bersama heater (pemanas). Dalam pendeteksian
gas Karbon Monoksida (CO), perubahan daya konduksi sensor tergantung pada
konsentrasi gas yang dideteksi. Rangkaian eletronika sederhana dapat merubah
daya konduksi menjadi sinyal keluaran dengan penyesuaian pada konsentrasi gas.
Berikut ini spesifikasi dari sensor TGS 2442 :
Target Gas : Carbon monoxide
Output : Resistance
Typical Detection Range : 30ppm - 1.000ppm
Heater Voltage : 5 ± 0.2 (DC/AC)
Sensor resistance : 6.81KW - 68.1KW (pada 100ppm)
Sensor membutuhkan tegangan (Vc) input 5V yang dihubungkan pada
heater (Vh) dan Rs, tegangan Vc digunakan sebagai tegangan input Rs di dalam
sensor. Rsmerupakan resistansi sensor yang terhubung pada pin 2 dan pin 3 pada
sensor, dan merupakan elektroda sensor. Pada pin 2 diberikan hambatan (RL) dan
sebagai output tegangan dari sensor yang kemudian dihubungkan pada rangkaian
ADC. Tegangan Vc juga digunakan sebagai input pada elemen heater (pemanas)
yang terhubung pada pin 1 dan 2 di dalam sensor.
Untuk menentukan nilai konsentrasi gas KarbonMonoksida terlebih
dahulu harus mengetahui nilai Rs, nilai Rs merupakan nilai konsentrasi gas untuk
menentukan nilai satuan yang diukur, dalam hal ini nilai satuan gas dinyatakan
sebagai ppm. Satuan ppm merupakan Part per Milion yang artinya partikel per
sejuta, dan nilai Rs dapat ditentukan dengan rumus seperti berikut :
Rs = ((Vcc x RL) / Vout) – RL………..(3.1)
Vccmerupakan tegangan input yang dibutuhkan pada rangkaian, dalam hal
ini Vcc diberikan tegangan 5V. RL merupakan hambatan pada sensor dan
diberikan hambatan sebesar 20 K ohm, sedangkan Vout merupakan nilai output
sensor yang nilainya selalu berubah-ubah. Sebagai acuan atau pembanding untuk
mengetahui nilai ppm dibutuhkan tabel Rs dan nilai konsentrasi gas Karbon
Monoksida (ppm), dan nilai tersebut dapat dilihat pada gambar 3.4 karena
kepekaan sensor TGS 2442 berada pada 30 – 1000 ppm maka nilai Rs tertinggi
berada pada 5 dan nilai konsentrasi gas CO berada pada 30 ppm, sedangkan nilai
Gambar 3.5Grafik Konsentrasi Gas (ppm) Terhadap Nilai Rs
3.2.3 Sensor Getar
Sensor ini berfungsi untuk mendeteksi getaran yang terjadi di suatu
tempat, karena sulitnya mencari komponen tesebut serta keterbatasan anggaran
maka penulis memakai komponen sensor getar sederhana yang bekerja secara
mekanik. Sensor getar ini adalah sensor getar air raksa yang akan bekerja jika ada
getaran yang mengenainya. Berikut ini adalah gambar dari sensor getar tersebut :
Gambar 3.6 Sensor getar dengan air raksa
Seperti terlihat pada gambar di atas, di dalam sensor getar tersebut terdapat
air raksa yang akan menghubungkan kedua kawat di dalam sensor tersebut jika
sebuah switching yang akan memberikan informasi berupa peringatan bahwa ada
suatu pergerakkan atau getaran.
3.2.4 Penguat Operasional (Op-Amp)
Tegangan yang dihasilkan dari output LM 35 sangat kecil, yaitu hanya
sebesar 10mV setiap kenaikan 10C, untuk memudahkan pembacaan pada alat ukur
dan agar tingkat kenaikan tegangan berada di atas toleransi ketelitian dari
rangkaian ADC maka diperlukan rangkaian Op-Amp. IC Op-Amp yang akan
digunakan disini adalah IC LM 358 yang memiliki keunggulan dalam pemakaian
daya yang lebih rendah, kemampuan penggunaan saluran input yang berkorelasi
dengan saluran pentanahan, dapat dicatu menggunakan mode catu daya tunggal
maupun catu daya ganda.
Gambar 3.7Simbol Diagram LM 358
Besarnya penguatan yang diharapkan oleh penulis adalah sebesar 3 kali sehingga
rangkaiannya adalah seperti di bawah ini :
Dari rangkaian tersebut, besarnya penguatan yang dihasilkan didapatkan
dari persamaan :
= + . ………...(3.2)
= + = ………..(3.3)
= = = kali..………...(3.4)
3.2.5 Multiplekser(IC 4051)
Rangkaian ini berfungsi untuk menggabungkan beberapa input data ke
dalam satu keluaran agar dapat diterima oleh rangkaian ADC 0804. Berikut ini
adalah bentuk dari IC 4051 beserta tabel kebenarannya :
(a) (b)
Gambar 3.9 (a) Bentuk Fisik dari IC 4051
(b) Tabel Kebenaran Multiplekser IC 4051
IC 4051 ini merupakan multiplekser yang mempunyai 8 kanal input dan
satu kanal output dan dapat bekerja pada rentang tegangan 3 – 18 Volt DC. IC ini
harus diberi masukan berupa sinyal clock untuk mengontrol saluran input mana
3.2.6 Pengubah Analog ke Digital (ADC 0804)
Sistem mikroprosesor hanya dapat mengolah (memproses) data dalam
bentuk biner saja, atau lebih sering disebut besaran digital, oleh sebab itu setiap
data analog yang akan diproses oleh mikroprosesor harus diubah terlebih dahulu
ke dalam bentuk kode biner (digital). Tegangan analog yang merupakan masukan
dari ADC berasal dari sensor. Sensor inilah yang mengubah besaran fisis menjadi
tegangan listrik. Tegangan listrik yang dihasilkan oleh sensor yang berubah secara
kontinyu pada suatu range tertentu disebut tegangan analog, dan tegangan analog
ini diubah oleh ADC menjadi bentuk digital yang sebanding dengan tegangan
analognya. Pada perancangan ini digunakan IC ADC 0804 yang dapat mengubah
tegangan analog yang berasal dari output penguat menjadi kode digital (biner 8
bit).
Gambar 3.10Skema Rangkaian ADC 0804
ADC 0804 mempunyai resolusi 8 bit dengan waktu konversi 100 µs untuk
clock 640 Khz serta mempunyai 8 kanal output. Pin 19 dan 4 dihubungkan
dengan R dan C untuk membangkitkan clock internal sehingga tidak
Gambar 3.11 Konfigurasi Pin dan Kaki ADC 0804
3.2.7 Mikrokontroler AT89S52
Data yang berasal dari ADC 0804 masih berupa data paralel, sehingga
membutuhkan rangkaian mikrokontroler untuk mengubah data tersebut ke dalam
bentuk serial. Rangkaian mikrokontroler ini merupakan pengolah data bagi sistem
yang telah dibuat. Pada dasarnya rangkaian mikrokontroler ini merupakan sistem
minimum dari mikrokontroler AT89S52. Agar mikrokontroler dapat bekerja,
maka dibutuhkan suatu rangkaian osilator sebagai sumber clock, dan dalam hal ini
digunakan osilator internal yang sudah ada dalam mikrokontroler AT89S52 yang
langsung dihubungkan dengan sebuah kristal. Kristal yang digunakan adalah
kristal 12 Mhz supaya mikrokontroler dapat bekerja dengan kecepatan maksimum.
Fungsi dari kapasitor C1 dan C2 merupakan sebagai penstabil clock, seperti
Gambar 3.12 Sistem Minimum AT89S52
3.2.8 Modulator FSK(XR 2206)
Data digital yang dikirimkan secara serial oleh mikrokontroler sebelum
diteruskan ke pemancar harus dimodulasikan atau diubah parameternya dari
parameter tegangan menjadi frekuensi. Modulator FSKakan mengubah data yang
dikirimkan mikrokontroler menjadi sinyal sinusiodal dengan frekuensi yang
bergantung pada data dari mikrokontroler. Nilai frekuensi yang dihasilkan
bergantung pada nilai R1, R2 dan nilai C yang merupakan komponen eksternal
yang harus ditambahkan pada IC XR-2206. Nilai frekuensi yang dihasilkan akan
sesuai dengan persamaan :
f1= 1/(R1.C)………..………(3.5)
dan
f2= 1/(R2.C)………..(3.6)
f1 merupakan frekuensi yang dihasilkan pada saat input berupa data logika high,
sedangkan f2 merupakan frekuensi yang dihasilkan pada saat input berupa data
logika low. Rangkaian modulator FSK dapat dilihat pada gambar 3.12. Pulsa
dari C ditetapkan sebesar 33nF, karena itu nilai R1 adalah sebesar 27,5 k ohm.
Sedangkan data logika low akan setara dengan f2 sebesar 2200 Hz, sehingga nilai
R2 adalah 13,7 k ohm. Untuk memudahkan pengesetan dan karena tidak ada nilai
resistor sebesar itu maka untuk R1 dan R2 digunakan resistor variabel
masing-masing sebesar 50 k ohm.
Gambar 3.13Rangkaian Modulator FSK
3.2.9 Demodulator FSK(XR 2211)
Rangkaian demodulator FSK menerima sinyal yang berasal dari receiver.
Seperti pada waktu dipancarkan, sinyal ini berupa sinyal sinusiodal yang
berubah-ubah frekuensinya sesuai dengan data yang dikirimkan. Demodulator akan
mengubah kembali sinyal sinusoidal tersebut menjadi sinyal digital (biner) yang
dapat diterima mikrokontroler melalui pin RxD. Pengubahan oleh demodulator
dilakukan dengan membandingkan dengan frekuensi tengah (f0). Frekuensi yang
lebih besar dari frekuensi tengah akan menghasilkan output logika high,
sedangkan frekuensi input yang kurang dari frekuensi tengah akan menghasilkan
hambatan pada R0 dan besarnya C0 (kondensator yang terhubung pada pin 13 dan
14 IC XR 2211). Nilai frekuensi tengah ditentukan berdasarkan nilai kedua
frekuensi yang dihasilkan oleh modulator FSK. Penentuan nilai frekuensi tengah
dihitung dengan persamaan :
= . ……….(3.7)
Pemilihan nilai R0dan C0dilakukan berdasarkan persamaan :
f0= 1/(R0.C0)………....(3.8)
Nilai f1 dan f2 berturut-turut adalah 1100 Hz dan 2200 Hz sehingga
didapatkan nilai f0 adalah sebesar 1556 Hz. Berdasarkan nilai f0 ini, ditentukan
nilai C sebesar 33 nF dan R0 sebesar 19,4 k ohm, dengan demikian R0 yang
digunakan dalam rangkaian adalah variabel resistor sehingga dapat diubah-ubah
nilainya untuk pengesetan.
3.2.10 Antarmuka Serial RS232
Data yang berasal dari demodulator FSK adalah pada level tegangan TTL
(Transistor Transistor Logic), sedangkan komputer hanya dapat menerima data
dalam bentuk level tegangan RS232. Oleh karena itu digunakanlah IC MAX232
yang dapat mengubah level tegangan TTL menjadi level tegangan RS232 dan
sebaliknya sehingga data dapat terbaca. Seperti kita ketahui bahwa level tegangan
pada TTLadalah antara 0 sampai 5 volt, dimana tegangan 0 volt mewakili kondisi
low dan 5 volt mewakili kondisi high.Sedangkan pada RS232 level tegangannya
berkisar antara -3 sampai -25 voltuntuk mewakili kondisi lowdan +3 sampai +25
volt untuk kondisi high. Gambar 3.14 merupakan gambar aplikasi dari IC
MAX232 sebagai antarmuka serial RS232.
Gambar 3.15Antarmuka Serial RS232 dengan IC MAX232
Komunikasi serial membutuhkan port sebagai saluran data, salah
satunya dengan menggunakan port serial DB9. Berikut tampilan port serial DB9
yang umum digunakan sebagai port serial :
Gambar 3.16 Port Serial DB9
Keterangan mengenai fungsi pada konektor DB-9 adalah sebagai berikut :
Received Line Signal Detect, dengan saluran ini DCE memberitahukan ke
DTE bahwa pada terminal masukan ada data masuk.
Receive Data, digunakan DTE menerima data dari DCE.
Transmit Data, digunakan DTE mengirimkan data ke DCE.
Data Terminal Ready, pada saluran ini DTE memberitahukan kesiapan
terminalnya.
Signal Ground, saluran ground
DCE ready, sinyal aktif pada saluran ini menunjukkan bahwa DCE sudah
siap.
Request to Send, dengan saluran ini DCE diminta mengirim data oleh
DTE.
Clear to Send, dengan saluran ini DCE memberitahukan bahwa DTE boleh
mulai mengirim data.
Ring Indicator, pada saluran ini DCE memberitahukan ke DTE bahwa
3.3 Perancangan Perangkat Lunak (Software)
Perangkat lunak pada sistem telemetri ini berfungsi sebagai pengolah dan
penampil data. Untuk mengolah data digunakan program lunak mikrokontroller
menggunakan bahasa assembly MCS51. Program mikrokontroler ini berfungsi
sebagai pengolah data, sedangkan untuk menampilkan data pada PC, program
yang digunakan adalah program Borland Delphi. Sebelum melakukan
perancangan software, hal pertama yang harus dilakukan adalah membuat
skematik diagram alur (flowchart) agar program yang dibuat dapat berjalan seperti
yang diharapkan.
Pada program pengolah data ini tahapan pertama dimulai dengan fungsi
startyaitu tahap dimana memulai keadaan pada pemrograman yang dalam bahasa
assembler yaitu dengan mengetikkan org 00h. Selanjutnya diikuti oleh proses
initialisasi untuk mempersiapkan parameter apa saja yang dibutuhkan untuk
proses selanjutnya, setelah itu program mulai membaca data. Setelah data terbaca
lalu diteruskan oleh fungsi selanjutnya sampai data ditampilkan pada PC selama
selang waktu beberapa detik kemudian menampilkan data selanjutnya secara
bergantian. Berikut ini adalah contoh potongan program initialisasi untuk
menghasilkan baudrate sebesar 1200 bps :
Initserial : mov scon,#52h
mov tmod,#20h
mov th1,#0e6h
setb tr1
Untuk mendapatkanbaudrate sebesar 1200 bpsmaka kita harus menentukan nilai
dari th1 yaitu dengan menggunakan rumus :
= − ………(3.9)
Di bawah ini adalah flowchart program utama dari sistem telemetri untuk
pendeteksi keadaan gunung berapi :
Gambar 3.17Flowchart Program Utama Sistem Telemetri Pendeteksi Keadaan Gunung Berapi
Dari gambar flowchart diatas dapat disimpulkan bahwa pada sistem
telemetri yang dibuat ini keadaan pertama yang akan dideteksi sistem adalah
perubahan data atau besaran suhu kemudian disusul oleh perubahan data getaran
Tabel 4.1Hasil Perbandingan Antara Output LM 35 dengan Termometer
No Output LM 35 (Volt) Termometer Analog (0C) Error (0C)
1 0,25 25 0
2 0,26 26 0
3 0,27 26,5 0,5
4 0,28 27,5 0,5
5 0,29 28 1
6 0,30 29 1
7 0,35 35,5 0,5
8 0,40 40,5 0,5
9 0,45 44 1
10 0,50 49 1
Dari tabel di atas dapat diketahui bahwa terdapat perbedaan kecil antara
hasil pembacaan sensor dan termometer analog dimana respon pembacaan
termometer lebih lambat dibandingkan keluaran tegangan dari LM 35. Karena
error yang dihasilkan tidak begitu besar maka rangkaian sensor ini masih
terbilang cukup baik dan mempunyai perbandingan yang linier terhadap
perubahan suhu.
4.1.2 Pengujian Op-Amp LM 358
Tegangan yang keluar dari sensor suhu masih sangat kecil yaitu hanya
sebesar 0,1 volt setiap perubahan 1 derajat celcius sehingga tidak akan terbaca
rangkaian ADC, maka keluaran dari sensor ini dikuatkan lagi dengan rangkaian
penguat agar dapat lebih mudah terbaca dan memudahkan pengukuran. Rangkaian
penguat yang dipakai menggunakan LM358 dengan penguatan sebesar 3 kali.
Pengaturan besarnya penguatan ini didapatkan sesuai persamaan :
= ………(4.1)
= + ……….(4.2)
Berikut ini adalah tabel hasil pengujian output sensor menggunakan multimeter :
Tabel 4.2 Hasil Keluaran Op-Amp
No Tegangan Output LM 35 (volt) Tegangan Output Op-Amp (volt)
1 0,26 0,78
2 0,27 0,81
3 0,28 0,84
4 0,29 0,87
5 0,30 0,90
6 0,35 1,05
7 0,40 1,20
8 0,45 1,35
9 0,50 1,50
4.1.3 Pengujian Sensor Getar Air Raksa
Prinsip kerja dari sensor getar ini sebenarnya mirip seperti saklar, yaitu
terhubung oleh air raksa yang berfungsi sebagai konduktor. Di bawah ini adalah
tabel hasil pengujian dari sensor getar :
Tabel 4.3Hasil Keluaran dari Sensor Getar
Tegangan Sensor (Volt) Keluaran ADC Status Sensor
0 0 Tidak Aktif
3,63 10111100 Aktif
Saat sensor getar ini aktif, maka tegangan yang keluar dari sensor ini akan
diubah oleh rangkaian ADC ke dalam bentuk bit bilangan biner yang selanjutnya
akan terbaca oleh mikrokontroller bahwa sensor dalam keadaan aktif dan akan
mengirimkan pesan peringatan yang akan muncul pada PC. Sebaliknya jika sensor
dalam keadaan OFF maka mikrokontroler akan membaca bahwa sensor dalam
keadaan tidak aktif dan akan mengirimkan pesan bahwa tidak ada aktivitas gempa
pada PC.
4.1.4 Pengujian Sensor Gas TGS 2442
Pada pengujian ini penulis tidak sempat mendapatkan data dari sensor ini
dikarenakan terjadi kesalahan saat melakukan perancangan sehingga
menyebabkan sensor ini rusak dan tidak dapat bekerja dengan semestinya. Untuk
itu pengujian pada rangkaian sensor ini tidak bisa dilakukan sehingga penulis
melakukan pengujian perhitungan berdasarkan data electrical characteristicsdari
datasheet sensor tersebut. Perhitungan ini dilakukan sesuai dengan rumus yang
Rs = ((Vcc x RL) / Vout) – RL
Misalnya kita asumsikan bahwa Vcc = 5 Volt, RL = 20 K ohm ,dan Vout = 4 Volt
maka :
Rs = ((5 x 20000) / 4 ) – 20000 = 5 K ohm
Setelah itu gunakan grafik perbandingan antara konsentrasi gas dengan nilai Rs
yang ada pada gambar di bawah ini :
Gambar 4.1Grafik Perbandingan Nilai Antara Konsentrasi Gas dan Hambatan Rs
Seperti terlihat pada grafik diatas bahwa nilai Rs berbanding terbalik
dengan nilai konsentrasi gas (ppm) jadi semakin kecil nilai Rs maka maka nilai
konsentrasi gas semakin besar. Dengan melihat grafik perbandingan tersebut
maka dapat diketahui bahwa pada nilai Rs 5 K ohm maka besar konsentrasi gas
4.1.5 Pengujian Multiplekser (IC 4051)
Untuk mengetahui apakah rangkaian multiplekser ini bekerja dengan baik
maka dilakukan pengujian dengan cara memasukkan tegangan dengan nilai yang
bervariasi pada tiap input multiplekser ini lalu dilihat keluarannya sesuai dengan
control input yang diberikan pada IC 4051 ini. Nilai tegangan tersebut masing –
masing adalah sebesar 2,4 V, 2,7 V , 3 V, 3,3 V, 3,6 V, 3,9 V, 4,3 V dan 4,7 V
yang akan dimasukkan secara berurutan mulai dari input X0 sampai X7 pada IC
4051. Berikut adalah data hasil pengujian yang dapat dilihat pada tabel :
Tabel 4.4Data Hasil Pengujian Multiplekser
Control Inputs Input Tegangan
Setelah dilakukan pengujian lalu data hasil percobaan dicocokkan dengan
Tabel 4.5Tabel kebenaran IC 4051
Setelah dibandingkan dengan tabel kebenaran maka dapat disimpulkan
bahwa rangkaian multiplekser menggunakan IC 4051 bekerja dengan baik.
4.1.6 Pengujian ADC 0804
Pada rangkaian ADC, yang perlu diperhatikan adalah resolusinya, resolusi
ini adalah batas minimum tegangan input yang dapat terbaca oleh ADC yang akan
menentukan bit keluaran dari rangkaian ADC. Untuk mengetahui resolusi tersebut
adalah dengan menggunakan persamaan :
=
Vref = Tegangan referensi ADC
2n = Lebar data bit
Sehingga untuk mendapatkan nilai output digital digunakan dengan menggunakan
rumus berikut :
Dalam perancangan alat ini tegangan power supply yang dipakai oleh
penulis adalah sebesar 4,89 volt sehingga besar resolusinya adalah :
Resolusi = . = , = ,
Hasil dari pengujian pada rangkaian ADC didapatkan data output sebagai berikut :
Tabel 4.6 Data Hasil Pengujian Rangkaian ADC
No Vin (+)
Sedangkan dari persamaan dihasilkan data sebagai berikut :
Data 1: Nilai Digital = ,
, = , = dibulatkan menjadi
41 diubah ke bentuk biner menjadi = 00101001
Data 2: Nilai Digital = ,
, = , = dibulatkan menjadi
43 diubah ke bentuk biner menjadi = 00101010
Data 3: Nilai Digital = ,
, = , = dibulatkan menjadi
44 diubah ke bentuk biner menjadi = 00101100
Data 4: Nilai Digital = ,
, = , = dibulatkan menjadi
46 diubah ke bentuk biner menjadi = 00101101
Data 5: Nilai Digital = ,
47 diubah ke bentuk biner menjadi = 00101111
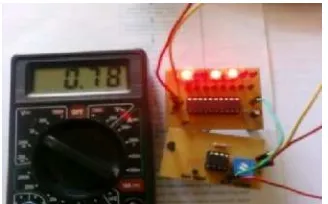
Dibawah ini adalah contoh gambar pengujian dari ADC 0804 saat tegangan
inputnya sebesar 0,78:
Gambar 4.2Hasil Pengujian ADC Saat Tegangan Inputnya sebesar 0,78 volt
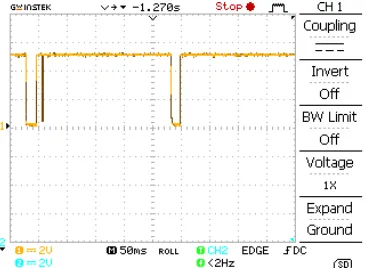
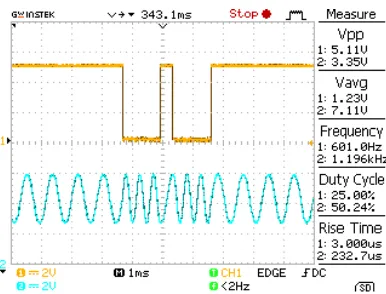
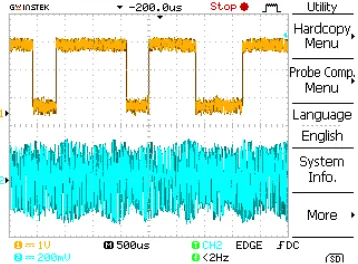
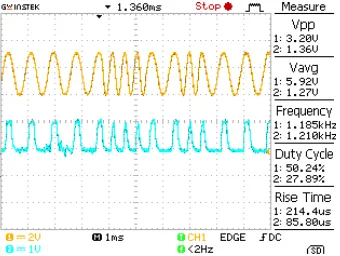
4.1.7 Pengujian Rangkaian Mikrokontroler
Pada rangkaian ini dilakukan pengujian dengan cara melakukan
pengukuran output mikrokontroler menggunakan alat ukur osiloscope untuk
melihat bentuk gelombang sinyal yang dihasilkan. Berikut adalah data-data yang
didapatkan dari hasil pengukuran :
Gambar 4.3Hasil Pengujian Output Mikrokontroler Saat Output